
A FIRE MONITORING APPLICATION FOR SCATTERED
WIRELESS SENSOR NETWORKS
A Peer-to-Peer Cross-layering Approach
Luis Bernardo, Rodolfo Oliveira, Ricardo Tiago and Paulo Pinto
Faculdade de Ciências e Tecnologia, Universidade Nova de Lisboa, P-2829-516 Caparica, Portugal
Keywords: Alarm Application, Wireless Sensor Networks, Critical Application, Peer-to-Peer.
Abstract: A cross-layering alarm application is proposed for supporting fire fighting operations. It runs on scattered
wireless sensor networks (WSN) composed by several isolated WSNs, where sensor nodes can be destroyed
by fire. Mobile patrol nodes deploy the alarm monitoring application and collect the alarm records,
containing the set of sensor measurements above the threshold values. The application was implemented in
TinyOS 2.0, on Telos B motes. It uses a new Multimode Hybrid MAC, which can be controlled by the
application. The application uses asynchronous mode when no alarms are active to optimise energy
consumption; changes to full on mode (without sleeping) to minimise delay during fire handling situations;
and uses the synchronous mode (with reserved bandwidth) during the transference of alarm records to the
patrol node, balancing delay and energy saving. The alarm application organises sensor nodes into a
clustered virtual overlay network and run a peer-to-peer searching service on top of it. This service is used
to locate nodes outside the danger area, and to locate alarm records. The application performance was tested
using TOSSIM simulations. Simulations results show the application capacity to capture a fire evolution.
1 INTRODUCTION
Wireless sensor networks (WSN) are likely to
become widely deployed in the future, when it is
technologically and economically feasible to
produce small and low-cost sensors. Meanwhile, off-
the-shelf experimental platforms like the Telos B
(Polastre, 05) motes allow us to start developing
WSN's future applications. This paper presents an
alarm application based on Telos B motes to help
fire fighting operations. Using the integrated
temperature, light and humidity sensors, motes can
monitor the fire favourable conditions in difficult
access environments. Telos B motes' radio can reach
up to 100m outdoor, and up to 30m indoor, but its
radio range is usually lower. For covering a large
area (e.g. Peneda-Gerês National Park in Portugal,
with 72000 ha) a very large number of motes would
be needed to create a continuous and dense WSN.
For wide range coverage, this assumption, although
considered reasonable in some WSN systems, may
not be feasible (Meguerdichian, 01). A WSN for fire
fighting was proposed and tested in (Hartung, 06).
However, specially made motes were used, with
long range directional radios and long range web
camera sensors, which reduce drastically the total
number of sensors needed to cover a vast region.
On this paper we assume that isolated islands of
fixed randomly deployed motes exist, forming
several scattered WSNs. Mobile patrol nodes
(laptops or PDAs (Personal Digital Assistants)
mounted on motor vehicles or fireman suits) roam
the fields, connecting to the scattered WSNs. They
control the application deployment, defining the
sensor sampling rate and two alarm threshold
conditions: a yellow threshold condition, for
possible fire; and a red threshold condition, for
imminent fire, where the possibility of a mote being
destroyed is high. Motes store the alarm triggering
sensor readings on other motes located outside the
endangered area (when that is possible), improving
resilience to fire. Patrol nodes can collect the stored
alarms from the motes in real-time (e.g. receiving
real-time warnings about fire enclosure danger), or
afterwards, with the fire propagation history.
The next section presents an overview of the
application design. Section 3 presents the initial
alarm deployment protocol. Section 4 presents the
p2p searching service, and describes how motes
handle alarm conditions. A description of how
189
Bernardo L., Oliveira R., Tiago R. and Pinto P. (2007).
A FIRE MONITORING APPLICATION FOR SCATTERED WIRELESS SENSOR NETWORKS - A Peer-to-Peer Cross-layering Approach.
In Proceedings of the Second International Conference on Wireless Information Networks and Systems, pages 173-180
DOI: 10.5220/0002149701730180
Copyright
c
SciTePress
alarms are recovered by the patrol node is addressed
in Section 5. Section 6 presents a set of simulation
results focused mainly on how the application
behaves during a fire. Finally, Section 7 draws some
conclusions and presents future work.
2 APPLICATION DESIGN
The alarm application design has three main
objectives:
Energy efficiency, to improve mote lifetime;
Low delay, to detect and store information
about danger spots and fires in progress;
Resilience to mote loss.
Energy efficiency is achieved by configuring the
MAC and transport layer protocols accordingly to
the alarm level, in a cross-layering approach. The
multimode hybrid medium access control protocol
(MH-MAC) (Bernardo, 07) was used. It can operate
in an asynchronous low duty cycle mode when no
alarms exist, minimizing energy consumption; and it
can operate in a synchronous mode (with reserved
slots) or in an always on mode (without sleeping),
during yellow and red alarm conditions, minimising
the delay at the MAC layer. No packets are
exchanged when no alarms are active, and clocks
drift freely. Since we assume a low mote density, we
decided not to use the "frisbee" model (Cerpa, 01)
where neighbour motes run coordinated deviated
low frequency sensor scans.
Energy efficiency and fire resilience is also
achieved by optimising the alarm record storage on
the WSN network. A fast lookup operation is needed
during alarms to search for a suitable mote to store
the records, or to move previously stored records
outside the risk area during an alarm situation. An
energy efficient lookup operation is also needed to
support alarm record lookup for patrol nodes.
During initial deployment, the alarm application
creates a virtual overlay network (VON) composed
by a minimum number of motes that fully connect
all motes on a WSN island. This set is usually called
a minimum connected dominant set (MCDS) (Wu,
99). The motes outside the MCDS are connected to
one or more motes in the MCDS, defining clusters.
Alarms are stored on MCDS members. The motes
within the MCDS run a peer-to-peer (p2p) protocol
similar to Gnutella (Chawathe, 03), to support mote
and alarm record search. A caching mechanism was
added to reduce the search overhead, and to favour
alarm record grouping. MCDS members act as ultra-
peers, conducting searches on their cluster members'
behalf. Some authors (Greenstein, 03) proposed the
use of distributed hash table based p2p approaches
for locating information on WSNs. However,
although motes are static they may fail silently due
to battery exhaustion or destruction by fire, when the
lookup operations are most needed. (Bernardo, 04)
shows that DHT approaches may fail for these
conditions, and that a flooding based p2p approach
enhanced with a proper caching mechanism handles
topology changes is a safer way. The trade-off is
shown in (Liu, 07), where the cost of pushing index
information is only effective when the number of
searches is high enough. Otherwise, it is better to
rely on a search based approach.
The alarm application has three different phases:
the initial deployment; the alarm handling phase;
and the alarm collecting phase, which may overlap
in time with the alarm handling phase. The next
three sections present these phases thoroughly.
3 ALARM DEPLOYMENT
When motes are initially deployed in the field, they
run a low duty-cycle idle application. MH-MAC is
set to asynchronous mode, and periodically turns-on
the radio listening for incoming packets. It is
assumed that all motes use the same duty cycle
period (T
DUTY_CYCLE
), equal to 1.1 seconds in the
current prototype.
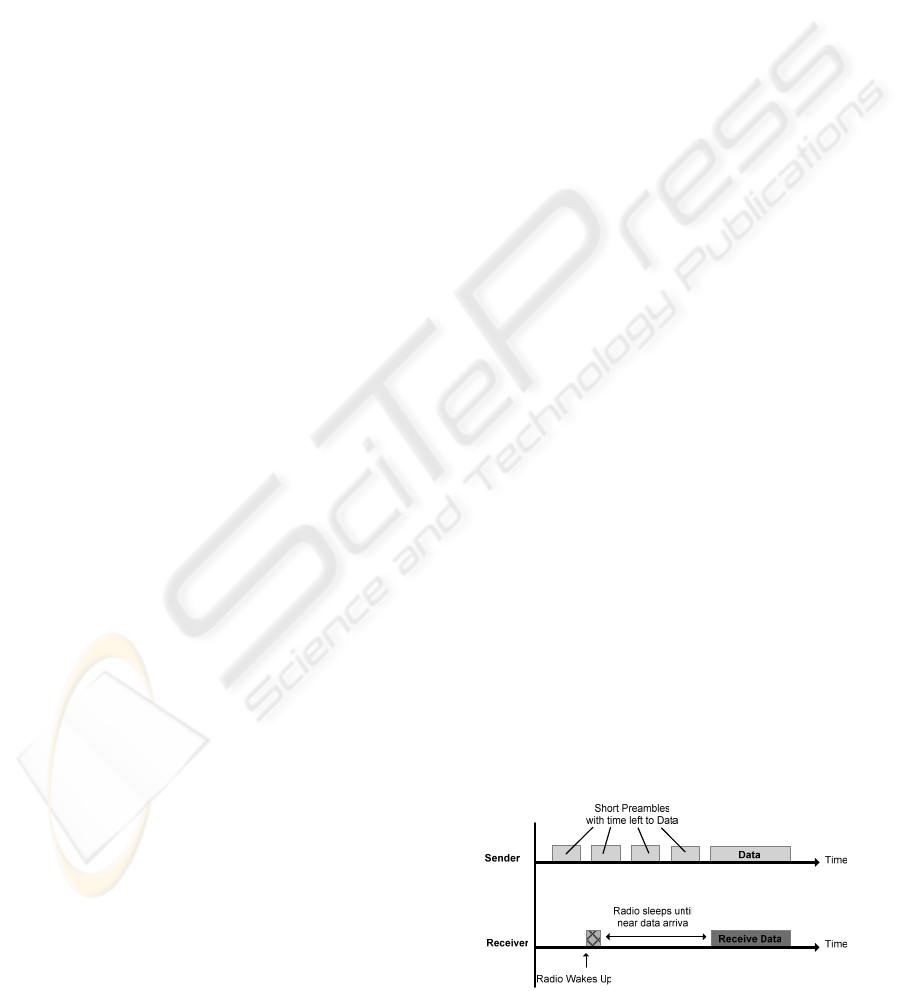
A moving patrol node looking for a WSN
periodically broadcasts a WSN-DISCOVERY packet
using MH-MAC asynchronous mode. A sequence of
small preambles with a total duration of 2T
DUTY_CYCLE
is sent before the WSN-DISCOVERY packet, to
guarantee that all receivers are awake (see Fig. 1).
After receiving the packet, receivers run a random
backoff timer and send a WSN-ACK packet,
signalling their presence and their energy level. The
patrol node selects one proxy mote using the RSSI
(Received Signal Strength Indication) measured
during the packet reception, and the energy level
reported by the mote. It selects the mote with the
highest RSSI level, and the energy value above a
minimum threshold value.
Figure 1: MH-MAC asynchronous broadcast transmission.
WINSYS 2007 - International Conference on Wireless Information Networks and Systems
190
During an initial alarm deployment, the proxy
mote starts the flooding of an ALARM-SET packet.
This flooding simultaneously activates a sensor
monitoring thread on the motes, and defines a
MCDS tree. MH-MAC asynchronous mode is used.
The ALARM-SET packet contains a decrementing
hop counter for controlling the area where the alarm
is activated, and two numeric expressions for the
yellow and red threshold alarm levels. The receiver
motes re-flood the ALARM-SET decrementing the
hop counter, until it reaches zero. Re-flooding
collisions are reduced by running a slotted random
backoff at each receiver mote. Receiver motes select
one of ten slots to re-broadcast the ALARM-SET
packet, counted from the end of the ALARM-SET
transmission. Each slot has a duration of
T
SLOT
= 2T
DUTY_CYCLE
+ α, (1)
where α= 0.1 seconds represents the time for a short
initial random backoff time (up to 30 ms), and the
ALARM-SET packet transmission time. If a preamble
transmission is detected during the short backoff
time before the packet transmission, the mote
cancels its transmission in this slot and selects a new
one. MH-MAC can handle packet collisions when
two or more transmitters are outside radio range but
their radio coverage areas intercept. Receiver motes
send a SHUT-UP packet with a configurable
probability when a collision is detected. This packet
includes the active sender address and signals other
senders that a transmission is in progress. Broadcast
receivers wake up a few milliseconds before the data
arrival to detect preamble collisions.
A mote assumes that all neighbours already
retransmitted an ALARM-SET packet when it does
not receive any retransmission during at least a T
IDLE
time (equal to 45 seconds in the prototype). The
mote then starts the MCDS creation phase, running
the algorithm presented in (Wu, 99). Initially, it
broadcasts a NEIGHBOUR-TABLE packet using
MH-MAC asynchronous mode, and waits for the
reception of the same packet from all its neighbours.
The NEIGHBOUR-TABLE packet contains the list
of neighbours, and allows the motes to know their
neighbourhood within two hops range. Each mote
decides if it is a cluster head (CH) using the
following rules (Wu, 99): it initially self-selects as
CH if two unconnected neighbours exist; afterwards,
in a second phase, it excludes itself from CH role if
another mote, or two motes, with the same number
or more of neighbours and with higher addresses
exist. All motes that self-select as CH, broadcast a
GATEWAY packet and pre-allocate a buffer in the
flash (64Kbytes) for storing alarm records. Motes
maintain a list of all neighbour CH motes.
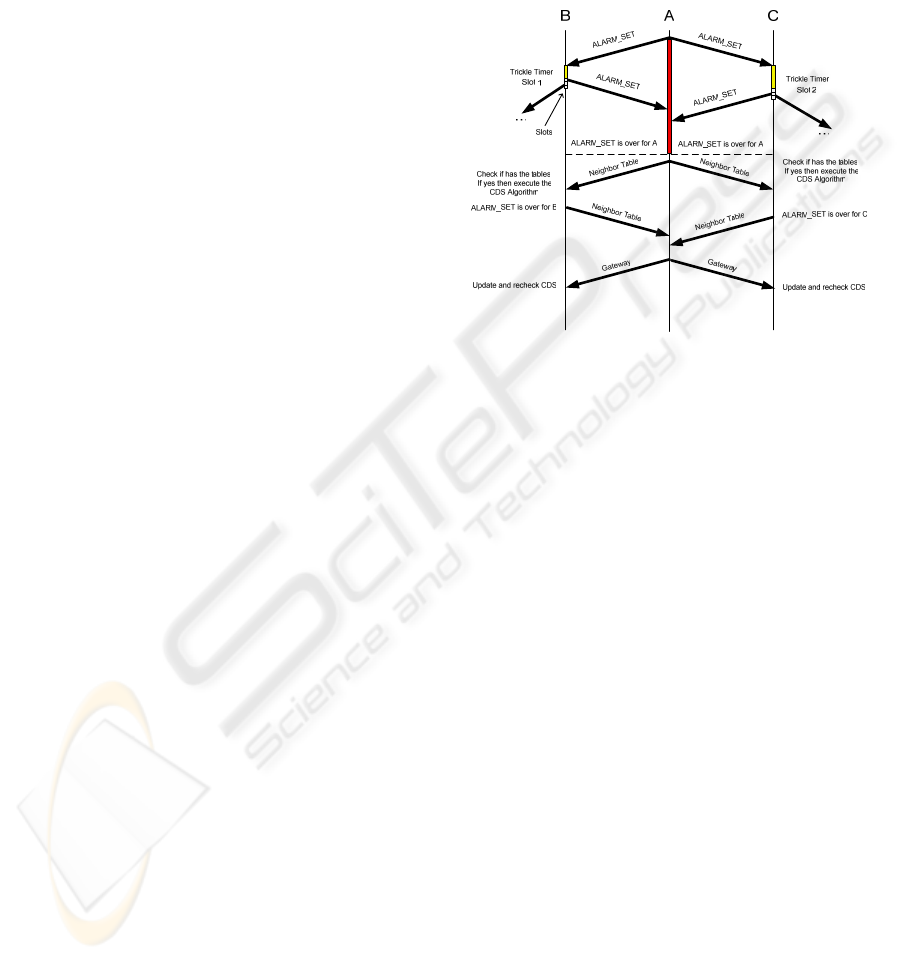
The alarm deployment protocol is illustrated in
Fig. 2. The proxy mote A broadcasts the ALARM-
SET packet, which is re-broadcasted by motes B and
C in two different slots. Afterwards, they exchange
the NEIGHBOUR-TABLE packets, and mote A self-
selects as a CH.
Figure 2: ALARM-SET flooding protocol example.
The minimum duration of an alarm deployment
phase can be calculated for a regular network with a
depth of r hops, where motes have a fixed number of
K neighbours, using (2). It assumes that only K-1
slots are used per ALARM-SET sent by the
neighbours (except for the proxy mote that uses K
slots). It also assumes that the descendent motes do
not interfere in their transmissions and that after K-1
slots plus the idle time all descendent motes transmit
the NEIGHBOUR-TABLE packet.
IDLESLOTIDLESLOT
TTTTKr
TimeDeployment
+++−−
≥
2))12)((1(
(2)
The alarm deployment operation can have a
large duration. However, this operation does not
need the support of the patrol node. After sending
the ALARM-SET packet to the proxy mote, the patrol
node can leave the WSN region. It also, does not
translate into a large energy cost, because each
packet transmits at most three packets (possibly
more if collisions occur), and MH-MAC is very
aggressive putting motes into sleep during broadcast
packet receptions. Finally, this protocol is run
outside a critical period. It creates a backbone
network for supporting the alarm handling protocol,
run during the critical periods.
A FIRE MONITORING APPLICATION FOR SCATTERED WIRELESS SENSOR NETWORKS - A Peer-to-Peer
Cross-layering Approach
191

4 ALARM HANDLING
After the alarm application deployment, motes run
autonomously a sensor scanning thread, maintaining
MH-MAC in the asynchronous mode to save energy.
No VON maintenance is done during the long idle
periods that can exist before an alarm is detected.
Periodically (by default, every 20 seconds) motes
test the sensor values for the red and yellow
threshold conditions.
When an alarm state is detected, motes change to
an alarm handling operation mode, where: MH-
MAC is set to full-on, or synchronous mode; the
sensor sampling rate is increased (by default, to 5
seconds); and the sensor readings are stored in a
repository mote, selected from the CH motes located
in a safer zone. The MH-MAC mode transition is
critical to the overall performance of the alarm
application, due to the large time overhead per
packet on the MH-MAC asynchronous mode. It is
important to use conservative yellow alarm
threshold values to allow the mode transition to
occur before the information transfer peak.
However, the cost of false alarms must also be taken
into account. A key component to the overall
performance is the searching service.
4.1 Peer-to-Peer Searching Service
CH motes run a peer-to-peer (p2p) searching service
to support the discovery of motes outside the alarm
zone, and the discovery of alarm records. The
MCDS defined during the deployment phase fully
connects all motes. Therefore, it constitutes a virtual
overlay network (VON) of CH motes, which can
efficiently run a flooding based search, like the one
proposed in Gnutella. Its performance was enhanced
applying a caching mechanism inspired on AODV
(Ad-hoc On-demand Distance Vector) routing
protocol (Perkins, 03).
The basic search mechanism is the flooding of a
QUERY packet over the MCDS VON. The QUERY
packet includes a hop counter and a query definition
part, which only has two values for the alarm
application: "search for CH in no alarm state"; or
"search for alarm record". CH motes receiving a new
QUERY packet with a nonzero hop counter
decrement it, and flood the packet over all CDS
links except the one where it came from. They also
store a QUERY forwarding record to detect
duplicate packets, route future HIT packets, and to
maintain a cache of HIT packets. After receiving the
QUERY packets, CH motes check their local state
(alarm state and the repository of alarm records) and
their HIT local cache. They send the QUERY packet
issuer a HIT packet with the results. The HIT packet
includes the sender's alarm state, the path alarm state
(the highest alarm state of a CH in the path), and the
full path to the sender mote (for routing purposes).
An expanding ring search approach is used to
reduce the flooding search cost (Chawathe, 03). The
search for an idle alarm (green) CH stops when a
green CH is found, or when the maximum range
specified by the application is reached. In this case, a
yellow alarm mote is selected if it exists, with a path
that crosses preferentially yellow motes.
The HIT caching mechanism reduces the
searching overhead, creating a client driven index
distribution through the VON. Since a fire evolution
forecast is not easy due to unpredictable factors (e.g.
wind), it is not easy to push HIT packets before they
are actually needed as (Liu,07)(Lee,06) propose. On
the other hand, unpredictability also introduces the
requirement for an efficient HIT cache invalidation
mechanism. The AODV's active neighbour table
approach is used. CH motes maintain a table of CH
neighbours to whom an HIT packet was sent
(originated locally, or forwarded). When their alarm
state changes (an alarm threshold is reached), a new
HIT packet is sent to all motes in the active
neighbour table, updating the previous cached
packets. Remote cached HITs are also updated. They
are sent when an intermediate node changes it alarm
state modifying the path alarm level. Finally,
cancelling HIT packets are sent when a mote failure
is detected.
The MCDS VON is not maintained during the
idle periods, and can suffer from CH lost by battery
exhaustion, or during a fire. Therefore, the search
protocol was enhanced to restore the VON in
response to mote losses. QUERY and HIT packets
are sent using unicast. They can be used to detected
link loss because they are acknowledged, contrarily
to the broadcast messages. If a packet transmission
fails for more than three tries, then the service
assumes that a link is lost. Using the previously
stored information, the mote runs the CH self-
selection algorithm, and sends the GATEWAY packet
if it sets himself as CH. If the red alarm threshold is
not active, the
NEIGHBOUR-TABLE is also sent.
Non red alarm motes do not consider neighbour red
alarm motes during the MCDS creation to improve
the VON survivability. The MCDS is also updated
when a new mote is discovered, due to overhearing
its packets.
Fig. 3 illustrates the search algorithm usage.
After running the alarm deployment algorithm,
motes B, C, and D are selected as CH. Mote A starts
WINSYS 2007 - International Conference on Wireless Information Networks and Systems
192
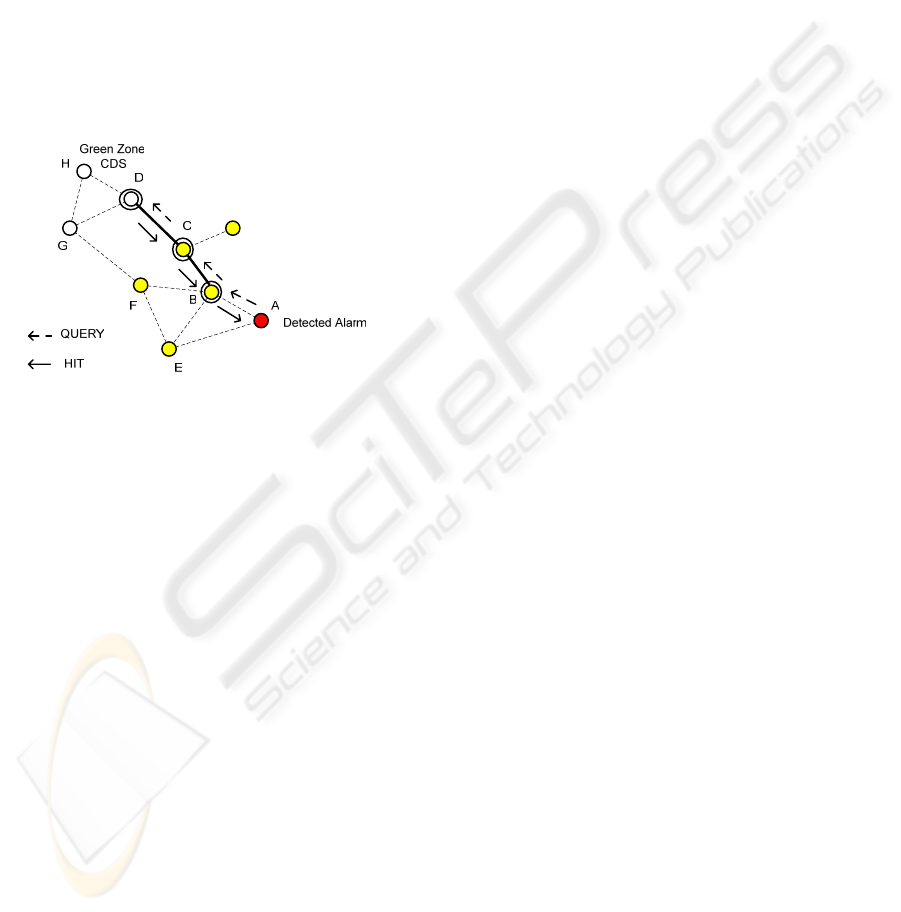
a two hop search for an idle CH (in the Green zone),
sending a QUERY packet to its neighbour CH (mote
B). The QUERY packet is forwarded to CH C and D,
and mote A receives HIT packets from both CHs,
reporting their alarm states and if they have any
alarm record stored (preloading the caches for future
searches). All CHs store in their cache the HIT
packets received. CH D adds C to its active
neighbour table, and CH C does the same for CH B.
If the fire spreads and mote C is destroyed or
reaches the red alarm level (and B and D remain
active), then motes F and G change their role to CH,
updating the VON on demand. CH B deletes from its
cache the HIT packets received from C and D when
it detects that mote C failed.
Figure 3: A search on the mote VON.
4.2 Alarm Information Storage
When a mote detects an alarm condition, it increases
its sampling rate and starts collecting the local
sensor alarm information. In order to reduce the
amount of information stored for each alarm, nodes
only record changes on the sensor values above a
minimum deviation value. The mote uses the
searching service presented above to select a green
CH. CHs only generates a local HIT if they still have
flash space to store extra alarm records. Using the
path contained in the HIT packet, the mote can send
ALARM-RECORD packets to the selected CH. These
packets include a mote identifier, a sequence
number, a time value, and can group several
individual sensor changes. If a CH receiving
ALARM-RECORD packets also detects an alarm
condition, then it also uses the searching service to
locate a safer CH to store the records. In this case
the transfer of the previous stored ALARM-RECORD
packets to the new CH can generate a large peak of
traffic. The PSFQ (Pump slowly, Fetch Quickly)
reliable transport protocol (Wan, 02) is used to
improve the ALARM-RECORD transference
reliability. ALARM-RECORD packets are locally
confirmed at each hop, and CHs generate ALARM-
NACK packets when a loss is detected.
The ALARM-RECORD transference time
depends strongly on the MH-MAC mode. Unicast
packet transmission in asynchronous mode is more
reliable and faster than broadcast transmission. The
preamble ends when the sender receives an early
acknowledgment. (Bernardo, 07) compares the
performance of the three MH-MAC modes and
shows that asynchronous mode is only effective for
up to two senders. Above that, only synchronous
mode and full-on mode are capable of supporting
acceptable throughput and delay. Full-on mode
minimises delay (less than 100 ms for ten concurrent
sending motes) at the cost of more collisions and
energy consumption. Synchronous mode maximises
throughput and minimises energy consumption for
more than four sending motes, at the cost of extra
delay (about 500 milliseconds). The alarm
application can have three different configurations:
FullOn; FullOn2Demand; Synchronous.
On the FullOn configuration, all motes change
its mode to Full-on before a fire occurs. A patrol
node command can be used to activate the change.
Unfortunately, this model is not always possible due
to the unpredictability of fires and it is used for
benchmarking the other approaches.
On the FullOn2Demand configuration, motes
only change to the Full-on mode when a local alarm
condition is detected. CH motes also change to Full-
on mode when a mote in their cluster is in alarm
state, or when they receive an ALARM-RECORD
packet. This means that they are being used to
transfer ALARM-RECORD packets between CHs, or
from a CH to a patrol node. CH motes return to the
asynchronous mode when no ALARM-RECORD
packets are received for more than IDLE-TX
seconds (by default 60 seconds), if the change was
triggered only by a packet flow.
The third scenario assumes that motes stay
always in a synchronous mode, including during the
idle periods. This scenario is usually assumed in
periodical data collection works based on periodical
synchronous MAC protocols (e.g. (Cerpa, 01)).
However, it requires the clock synchronization
overhead during the idle periods.
5 ALARM RECOVERING
When the patrol node wants to collect alarm records,
it runs the WSN-DISCOVERY packet broadcast
protocol presented in section 3 to discover the WSN
A FIRE MONITORING APPLICATION FOR SCATTERED WIRELESS SENSOR NETWORKS - A Peer-to-Peer
Cross-layering Approach
193
and to select a proxy mote. The proxy selection rule
now also takes into account if a mote is CH. The
patrol node sends the mote a QUERY packet,
requesting all alarm records within a user specified
range. Non-CH motes send the request to a CH, and
forward the received HIT packets to the patrol node.
The ALARM-RECOVER packet is used to
request the stored ALARM-RECORDs. It includes
the alarm application identifier field (defined during
the initial deployment), and the start and the stop
time fields, which define a time limit for the alarms
to collect. Future stop times request a continuous
feed of ALARM-RECORD packets to the patrol node
until the stop time is reached.
Initially, during the access to the searching
service only the proxy mote changes its MH-MAC
mode to synchronous, and synchronises with the
patrol node. Afterwards, all CH motes in the path to
CH motes storing ALARM-RECORDs also change
their mode to synchronous, and dedicated channels
are reserved connecting the source CHs to the patrol
node. The ALARM-RECOVER packets are source
routed using the path received in the HIT packets.
When a CH receives this packet, it changes its MH-
MAC mode to synchronous (if it is not already
there) and requests MH-MAC to synchronize with
the next CH in the path.
6 PERFORMANCE EVALUATION
The alarm application prototype was implemented in
TinyOS 2.0 (TinyOS2.0, 07) and was tested on
Crossbow Telos B motes. However, due to the small
number of motes available for this project, the
performance evaluation was done using the
TOSSIM simulator (Levis, 03). The current
TOSSIM version does not support the CC2420 radio
stack used by the LPL (low power listening) library
and the flash access. Therefore, we emulate the
CC2420 radio stack and modified TOSSIM interface
implementations to simulate the flash access time.
Additionally, meters were placed on the MAC and
the application code to measure the number of
milliseconds used for data transmissions, for data
receptions, for flash reads and writes, and the time
spent in active and radio sleep states. Using the
current consumption specifications shown in Table
1, we were able to estimate the total current
consumption for the tested scenarios. We considered
that in idle or receiving state the mote has the
consumption of operation MCU+Radio RX, in radio
sleep it has the consumption of operation MCU
Active, and during packet transmissions it has the
consumption of operation MCU+Radio TX.
Table 1: Telos B current consumption (Polastre, 05).
Operation Current
Mote Standby (RTC on) 5.1μA
MCU Idle (DCO on) 54.5μA
MCU Active 1.8 mA
MCU + Radio RX 21.8 mA
MCU + Radio TX (0dBm) 19.5 mA
MCU + Flash Read 4.1 mA
MCU + Flash Write 15.1 mA
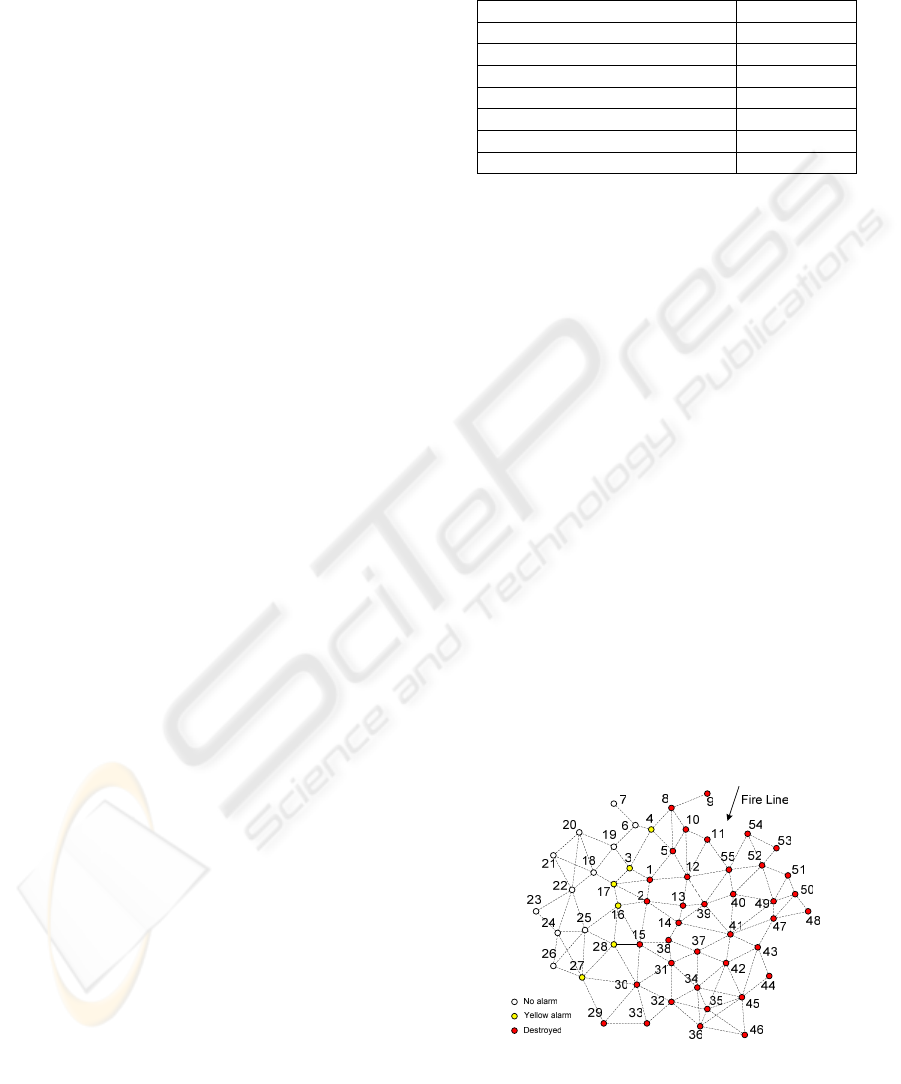
The performance results presented in this paper
focus on the alarm handling phase. We simulated the
WSN presented in Fig. 4 with 55 fixed motes, with
an average link distance of 20 meters. The yellow
alarm and the red alarm expressions were
respectively "SOt > 40ºC" and "SOt > 60ºC", where
SOt is the sensor output temperature value. The
temperature increases at a fixed rate of 10ºC per
minute after the yellow alarm is set, and the motes
fail when the temperature reaches 80ºC.
Initially, all motes are idle (no alarms are active).
Then, a head of fire crosses the WSN following the
arrow direction, at a variable speed. When the head
of fire reaches the motes represented in red (1, 2,
etc.) they trigger the yellow alarm, 120 seconds later
they trigger the red alarm, and after 120 seconds
more the motes are destroyed. Motes represented in
yellow (3, 4, etc.), temporarily trigger the yellow
alarm, during an interval of 360 seconds. The
remaining motes (6, 7, etc.) are not affected by the
fire. 72 ALARM-RECORD packets are generated for
each red mote, and 48 ALARM-RECORD packets
are generated for each yellow mote. Seven head of
fire speeds were simulated, ranging from 50
meters/hour to 1000 meters/hour.
Figure 4: Simulated WSN.
This section analyses the performance of FullOn,
FullOn2Demand, and Synchronous configurations,
WINSYS 2007 - International Conference on Wireless Information Networks and Systems
194
presented in section 4.2. The asynchronous MH-
MAC mode used a duty cycle period (T
DUTY_CYCLE
)
of 1.1 seconds, and a duty cycle of 9%. Packet
transmission is preceded by a sequence of preambles
lasting 2.2 seconds for broadcast, and an average of
0.55 seconds for unicast packets due to the early
acknowledgement mechanism. Synchronous mode
uses a periodic slot structure with 11 slots of 100ms.
Communication between motes is all done through
reserved slot, guarantying that more than 10
messages can be exchanged between motes for each
period without being lost in collisions. However,
MH-MAC organizes the slots in a single ladder,
minimising the delay only in one direction. The
average per hop delay is 0.55 seconds.
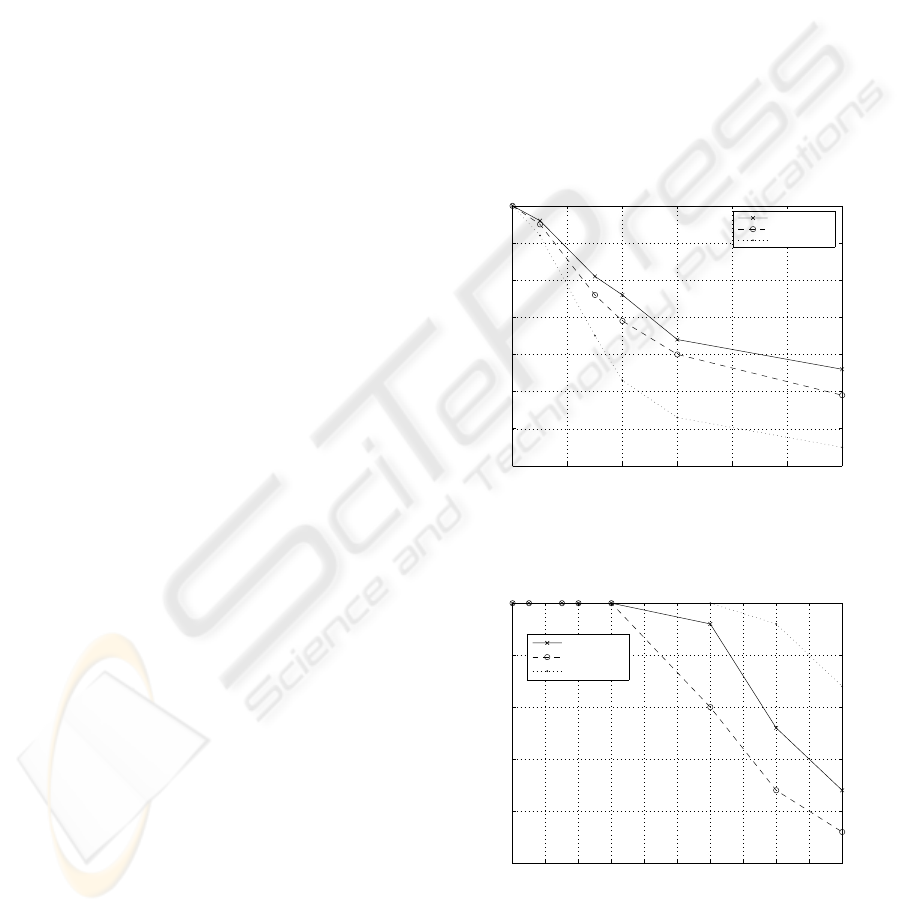
Fig. 5 and Fig. 6 show the percentage of
ALARM-RECORD packets that were stored in the
surviving motes, respectively when a pure flooding
approach is used, and when HIT caching and HIT
invalidation is used. Fig. 5 shows that a simple
flooding search approach fails to cope with the fire
dynamics. The application starts loosing records in
all three approaches for a head of fire speed of 50
m/hour, equivalent to 2.5 WSN hops per hour. The
most critical operation is the search for a safe CH to
transfer locally stored ALARM-RECORDs.
Whenever the existing path fails, a QUERY is
flooded to locate a new safe path to a safe CH. For
CH motes located far from the green zone (e.g. mote
45) require a four hop QUERY packet flooding, each
time an intermediate mote fails. When the head of
fire speed is increased more ALARM-RECORDS are
lost, mainly due to CHs that do not transfer stored
alarm records, or became isolated (e.g. motes 36 and
46). The ALARM-RECORD survivability is severely
affected by the hop-by-hop delay, and Synchronous
configuration has the highest delay value, followed
by the FullOn2Demand configuration.
Fig. 6 shows that the proposed HIT caching and
HIT invalidation methods are capable of effectively
improving the ALARM-RECORD survival rate for
all three configurations. They reduce the dependency
on the hop-by-hop delay because the reaction to the
approximation of the head of fire is anticipated. A
new path is selected as soon as a mote in the path
changes its alarm state. HIT updates maintain the
validity of the cached HITS, and QUERY flooding
only occurs when a longer path is needed. Therefore,
motes have more time to transfer their records to a
safe CH. Records are lost for head of fire speeds
above 300 m/hour, equivalent to 15 WSN hops per
hour. Fig. 6 results suggest that the dominant
parameter is the available bandwidth to handle the
record transference during the head of fire approach.
The Synchronous MH-MAC mode provides more
bandwidth for load peaks than the FullOn mode due
to collision avoidance (Bernardo, 07). Fig. 6 also
shows that the motes can change from asynchronous
mode to full-on mode on demand, with a marginal
loss in the alarm record survival rate. For the relative
fastest speed (50 hops / hour or 1000 meters / hour),
the alarm system was able to maintain more than
75% of the ALARM-RECORD packets generated
during a fire for the FullOn2Demand approach, only
5% below the FullOn approach results. The
FullOn2Demand
approach could be improved if
T
DUTY_CYCLE
is shorter. This parameter affects all
unicast and broadcast asynchronous transmission
times, and indirectly the time it takes to change from
the asynchronous mode to the Full-on mode.
However, energy consumption on the idle periods
would also be increased.
0 100 200 300 400 500 600
30
40
50
60
70
80
90
100
Speed[m/hour]
Saved data [%]
Motes spaced 20m
FullOn
FullOn2Demand
Synchronous
Figure 5: Influence of the fire front velocity in the
percentage of saved data, without HIT invalidation.
0 100 200 300 400 500 600 700 800 900 1000
75
80
85
90
95
100
Speed[m/hour]
Saved data [%]
Motes spaced 20m
FullOn
FullOn2Demand
Synchronous
Figure 6: Influence of the fire front velocity in the
percentage of saved data, with HIT invalidation.
The head of fire speed has no significant influence in
the current consumption per mote and per second.
A FIRE MONITORING APPLICATION FOR SCATTERED WIRELESS SENSOR NETWORKS - A Peer-to-Peer
Cross-layering Approach
195

The average and standard deviation current
consumed by the surviving motes (with yellow
alarm or with no alarm) was 21.80 ± 0 mA, 10.62 ±
6.67 mA and 10.78 ± 2.23 mA, respectively for the
FullOn, FullOn2Demand, and Synchronous
configurations and 1000 m/hour. FullOn2Demand is
clearly the less demanding approach if the energy
savings during idle periods are taken into account.
7 CONCLUSIONS AND FUTURE
WORK
This paper presents an alarm application designed to
support fire fighting operations. It shows that it is
possible to improve the mote longevity (avoiding the
synchronization costs during idle periods) and still
have a timely response to destructive events when
the application controls the MAC behaviour. The
reaction speed is mainly conditioned by the duty
cycle period. In order to increment it, more energy
must be spent in idle time.
Future work includes the test of an on-demand
synchronous mode, the adaptation of the "frisbee"
model to an asynchronous operation mode, and the
thorough testing of the application on a large mote
test bed to validate the simulation results.
ACKNOWLEDGEMENTS
This work was partially supported by the Fundação
para a Ciência e Tecnologia under the project
SIGAPANO POSC/EIA/62199/2004.
REFERENCES
Bernardo, L., and Pinto, P., 2004. A decentralized location
service Applying P2P technology for picking replicas
on replicated services. In ICETE'04, 1
st
Int. Conf. on
E-Business and Telecommunication Networks, Vol.1
pp.39-47, INSTICC Press. Aug. 2004.
Bernardo, L., Oliveira, R., Pereira, M., Macedo, M., and
Pinto, P., 2007. A Wireless Sensor MAC Protocol for
bursty data traffic. In IEEE PIMRC'07, 18th IEEE
Annual International Symposium on Personal Indoor
and Mobile Radio Communications, Sep. 2007.
Cerpa, A., Elson, J., Estrin, D., Girod, L., Hamilton, M.,
and Zhao, J., 2001. Habitat Monitoring: Application
Driver for Wireless Communications Technology. In
1st ACM SIGCOMM Workshop on Data Comm. in
Latin America and the Caribbean, ACM Press. Apr.
2001.
Chawathe, Y., et al., 2003. Making Gnutella-like P2P
Systems Scalable. In SIGCOMM'03, the 2003
conference on Applications, technologies,
architectures, and protocols for computer
communications, ACM Press, Aug. 2003.
Greenstein, B., Estrin, D., Govindan, R., Ratnasamy, S.,
and Shenker, S., 2003. DIFS: A Distributed Index for
Features in Sensor Networks. In SNPA'03, 1st IEEE
Workshop on Sensor Networks Protocols and
Applications, IEEE. May 2003.
Hartung, C., Han, R., Seielstad, C., and Holbrook, S.,
2006. FireWxNet: A Multi-Tiered Portable Wireless
System for Monitoring Weather Conditions in
Wildland Fire Environments. In MobiSys'06, 4
th
Int.
Conf. on Mobile Systems, Applications, and Services,
pp.28-41, ACM Press. Jun. 2006.
Kim, H.S., Abdelzaher, T.F., and Kwon, W.H., 2003.
Minimum-Energy Asynchronous Dissemination to
Mobile Sinks in Wireless Sensor Networks. In
SenSys'03, 1
st
ACM Conf. on Embedded Networked
Sensor Systems, ACM Press, Nov. 2003.
Lee, U., Magistretti, E., Zhou, B., Gerla, M., Bellavista,
P., and Corradi, A., 2006. Efficient Data Harvesting in
Mobile Sensor Platforms. In PerSeNS'06, 2
nd
IEEE Int.
Workshop on Sensor Networks and Systems for
Pervasive Computing, IEEE, Mar. 2006.
Levis, P., Lee, N., Welsh, M., and Culler, D., 2003.
TOSSIM: Accurate and Scalable Simulation of Entire
TinyOS Applications. In SenSys'03, Int. Conf. on
Embedded Networked Sensor Systems, ACM, pp.
126-137, Nov. 2003.
Liu, X., Huang, Q., and Zhang, Y., 2007. Balancing Push
and Pull for Efficient Information Discovery in Large-
Scale Sensor Networks. IEEE Trans. on Mobile
Computing Vol. 6 No. 3, pp. 241-251, Mar. 2007.
Meguerdichian, S., Koushanfar, F., Potkonjak, M., and
Srivastava, M., 2001. Coverage Problems in Wireless
Ad-hoc Sensor Networks. In IEEE Infocom'01, 20
th
Annual Joint Conference of the IEEE Computer and
Communications Societies, pp. 1380-1387, Abr. 2001.
Perkins, C., Belding-Royer, E., Das, S., 2003. Ad hoc On-
Demand Distance Vector (AODV) Routing. IETF
RFC 3561.
Polastre, J., Szewczyk, R., and Culler, D., 2005. Telos:
Enabling Ultra-Low Power Wireless Research. In
IPSN'05, Int. Symp. on Information Processing in
Sensor Networks, IEEE, pp. 364- 369, Apr. 2005.
TinyOS2.0, 2007. TinyOS 2.0 Documentation. Retrieved
Mar. 2007 from http://www.tinyos.net/tinyos-2.x/doc/
Wan, C.Y., Campbell, A.T., and Krishnamurthy, L., 2002.
PSFQ: A Reliable Transport Protocol for Wireless
Sensor Networks. In WSNA'02, 1
st
Int. Workshop on
Wireless Sensor Networks and Applications, ACM, pp.
1-11, Sep. 2002.
Wu, J., and Li, H., 1999. On Calculating Connected
Dominating Set for Efficient Routing in Ad Hoc
Wireless Networks. In DIALM '99, 3
rd
Int. Workshop
on Discrete Algorithms and Methods for Mobile
Computing and Communications, ACM, pp. 7-14,
Aug. 1999.
WINSYS 2007 - International Conference on Wireless Information Networks and Systems
196
