
KNOWLEDGE BASED SYSTEM FOR RELIABLE PERIMETER
PROTECTION USING SENSOR NETWORKS
Constantin Voloşencu, Daniel-Ioan Curiac, Ovidiu Banias
Automatics and Applied Informatics Department, “Politehnica” University of Timisoara
Bd. V. Parvan nr. 2, 300223 Timisoara, Romania
Alex Doboli
Electrical and Computer Engineering Department, State University of New York, NY 11794-2350, USA
Octavian Dranga
School of Engineering, James Cook University, Townsville, QLD 4811, Australia
Keywords: Perimeter protection, wireless sensor networks, redundancy, knowledge based systems, neural networks,
perceptron.
Abstract: This paper provides a strategy for perimeter protection using sensor networks with hardware and analytical
redundancy. The sensor network reliability is augmented using a knowledge-based system, which implicates
the analysis of the trustworthiness of each sensor. For this, we used two stratagems: one that relies on
hardware redundancy based on the Confidence Weighted Voting Algorithm and one that relies on analytical
redundancy based on a neural perceptron predictor that uses past and present values obtained from
neighbouring nodes. This solution can be also a way to discover the malfunctioning nodes that were subjects
of an attack and it is localized at the base station level being suitable even for large-scale sensor networks.
1 INTRODUCTION
Sensor networks have proved their huge viability in
the real world in a variety of domains. Advances in
miniaturization, decreasing of their cost and power
and improvements in wireless networking and
micro-electro-mechanical systems have led to
research for large-scale deployment of wireless
sensor networks and formation of a new computing
domain. In the last years the deployment of small-
scale sensor networks in support of a growing array
of applications has become possible (Akyildiz,
2002), (Pottie, 2000). A lot of applications,
including seismic disturbances, contaminant flows
and other ecological or environmental disasters,
battlefield control, disaster management and
emergency response, which involve sensor
networks, will also be possible in the near future.
Detecting targets moving inside a field of interest is
one of the applications of wireless sensor networks
(Li, 2002), (Cao, 2005). These networks consist of
hundreds or thousands of heterogeneous disposable
sensor nodes, capable of sensing their environment
and communicating with each other via wireless
channels, coordinating and monitoring large areas.
Individually nodes possess properties such as
functionality and inter-node cooperation, under
limited energy reserves and technological
limitations. There are applications where the sensors
were generally bulky devices wired to a central
control unit whose role was to collect, process, and
act upon the data gathered by individual sensors. A
network of sensors could be developed with small
motion detectors, metal detectors, pressure detectors,
and vibration detectors, deployed around a valuable
asset. When the sensors were able to classify
“intruders”, a human reasoning to decide what to do
in response was necessary. The vision of the smart
dust program of wireless sensor network research
was to make machines with self-contained sensing,
computing, transmitting, and powering capabilities
so small and inexpensive that they could be released
into the environment in massive numbers. Sensor
51
Volo¸sencu C., Curiac D., Banias O., Doboli A. and Dranga O. (2007).
KNOWLEDGE BASED SYSTEM FOR RELIABLE PERIMETER PROTECTION USING SENSOR NETWORKS.
In Proceedings of the Second International Conference on Wireless Information Networks and Systems, pages 51-56
DOI: 10.5220/0002146500510056
Copyright
c
SciTePress

networks are expected to play an important role in
hybrid protection infrastructures when combined
with robots and human decision makers. In such
cases a knowledge-based system is a powerful way
of solving the problems. Redundancy in sensor
networks (hardware and analytical) can provide
higher monitoring quality (Gao, 2003) by employing
the adjacent nodes in order to discern the rightness
of local data. When a sensor malfunction appears
and the hardware redundancy is lost, the problems
can be solved using the analytical redundancy.
Redundancy increases data accuracy, system
reliability and sensor network security to provide
protection against service interruptions.
The rest of the paper is organized as follows.
Section 2 presents the related work in the domain.
Section 3 contains our strategy for perimeter
protection. Section 4 describes a case study for our
security strategy. Section 5 presents the conclusions.
2 RELATED WORK
There is relatively little work in the area of securing
sensor networks based on redundancy. A useful
survey for initiation in the domain of wireless sensor
network is presented in (Akyildiz, 2002).
In (Nowak, 2003) a technique for edge detection
of a phenomenon within a wireless sensor network is
proposed. The approach involves a hierarchical
processing strategy, where nodes collaborate, into a
non-uniform rectangle, adapted to the phenomenon
partition of the sensor field.
Research into authentication and confidentiality
mechanisms of sensor network protocols have been
started in order to identify the problems and to
propose technical solutions (Avancha, 2003),
(Intanagonwiwat, 2000). Some threats to these
applications were identified and a security model
operating on the base station level was proposed.
The application mentioned requires mitigation
against traffic analysis, relying solely on broadcasts
of end-to-end encrypted packets. Nodes adjacent to
the base station are utilised as intermediary hops.
The model corrects some classes of aberrant node
behaviour.
Using wireless sensors networks for tracking
moving objects is discussed in (Cao, 2005), where
an analysis of their performances is done. The
authors provide analytic formulae for the mean delay
until a target is detected, when moving on a straight
line at a constant speed. The authors consider a
system model where sensors are randomly
distributed within a field of interest, with each
sensor having identical sensing areas that follow the
unit disk model.
In (Clouqueur, 2002) the authors propose
collaborative detection models, where sensors
collectively arrive at a consensus about the presence
of a target. Sensors are assumed to be randomly
deployed within the field of interest and the sensing
capability of each sensor is assumed to decay with
distance, with all sensors having identical sensing
areas. They formulate the target detection problem
as an unauthorized traversal problem and propose
deployment strategies for minimizing the cost of the
network that achieves the desired target detection
probability.
These highly localized results of redundancy in
sensor networks can be aggregated by methods such
as (Xu, 2001) to provide higher data reliability for
requesting applications such as event/target
detection (Li, 2002), (Brooks, 2003).
In (Aslam, 2005), a network with binary sensors
is used for tracking a moving object. This is an
elementary case for our solution of using a
perceptron as the model for a binary sensor network.
3 PROPOSED STRATEGY
3.1 Sensor Network Assumptions
We make the following assumptions related to the
sensor network:
a) The sensor network is static, i.e., sensor nodes
are not mobile; each sensor node knows its own
location.
b) The sensor nodes are similar in their
computational and communication capabilities and
power resources to the current generation sensor
nodes. Moreover, because they have to sense if an
intruder is in their proximity, they can provide only
two values, which we assumed to be 0 (for
inexistence of an intruder in their proximity) and 1
(for existence of an intruder in their proximity).
c) We rely on wireless cellular network
architecture (Feng, 2002). In this architecture, a
number of base stations have already been deployed
within the field. Each base station forms a cell
around itself that covers part of the area. Mobile
wireless nodes and other appliances can
communicate wirelessly, as long as they are within
the area covered by one cell.
d) The base station, sometimes called access
point, acting as a controller and as a key server, is
assumed to be a laptop class device and supplied
with long-lasting power. We also assume that the
base station will not be compromised.
With the purpose of solving the problem of a
reliable perimeter protection, we rely on two very
WINSYS 2007 - International Conference on Wireless Information Networks and Systems
52
important properties: a) inherent redundancy, which
is an important natural feature of sensor networks;
and b) the determinism of the measured values
provided by sensors related to their past recordings.
3.2 Redundancy in Sensor Networks
and Its Benefits
One important natural feature of the sensor networks
employed by our strategy is the inherent
redundancy. We use both hardware and analytical
redundancy in order to increase the reliability of our
perimeter protection approach.
Hardware (physical) redundancy ensures the
reliability in sensor networks (Gao, 2003),
(Clouqueur, 2001) and implies the use of
supplementary sensors (deployed in the field, due to
the necessity of covering the area in case of
malfunctioning of some sensor nodes) and selection
of data that appears similarly on the majority of
sensors.
Analytical (functional) redundancy is based on
the determinism of the measured values provided by
sensors. The information from different sensors is
built on the fact that actual sensor value is related
with past values provided by the same sensor. The
use of analytical redundancy is done through a
process of comparison between the actual sensor
value and the expected/estimated sensor value. This
approach is based on a mathematical model that can
predict the value of one sensor by taking into
consideration the past and present values of
neighbouring sensors or of the implied sensor itself.
The computation implied in this approach is done at
the base station level (laptop class device), where all
requirements are satisfied.
3.3 Knowledge Based System for
Reliability Improvement
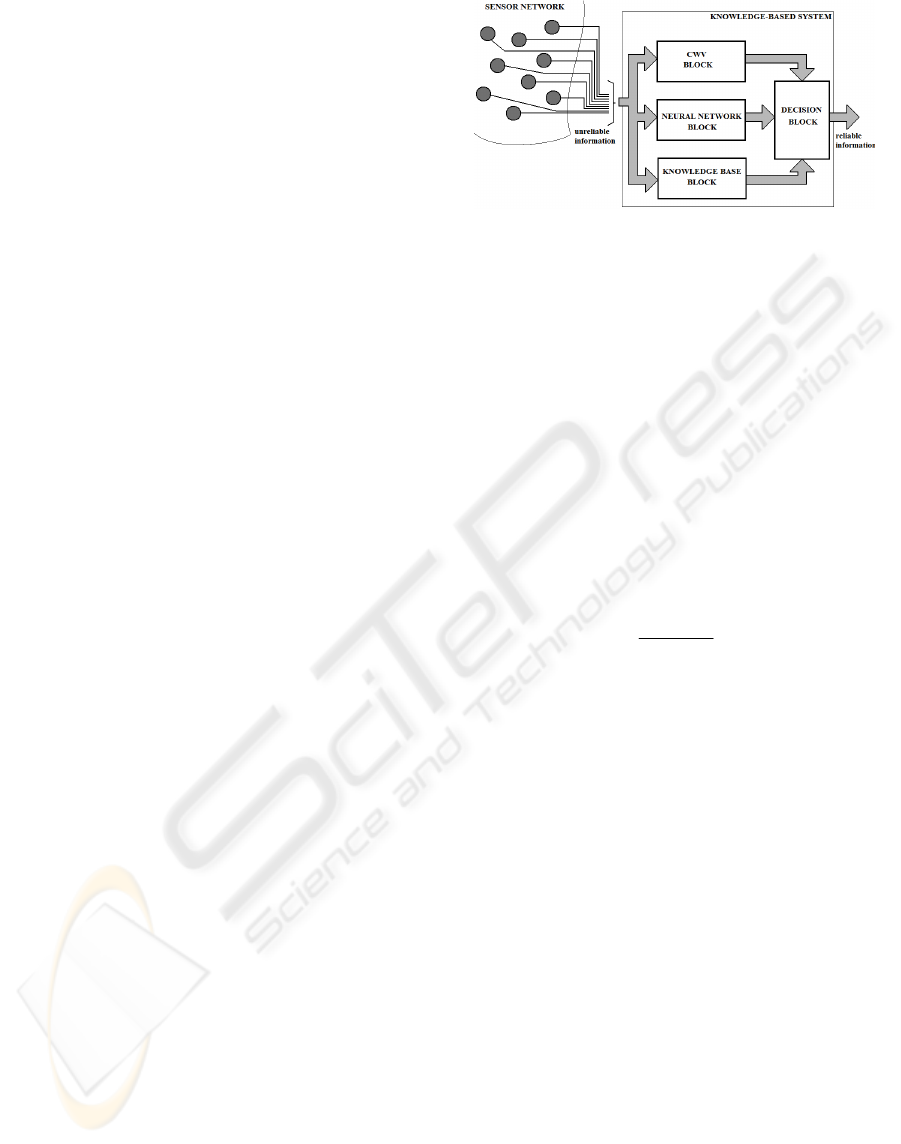
Our strategy to improve the reliability of the data
provided by the perimeter protection sensor network
relies on the knowledge-based system (KBS)
presented in figure 1, which contains four
components: a) Confidence Weighted Voting
(CWV) Block, b) Neural Network Block, c)
Knowledge Base Block, and d) Decision Block.
Figure 1: Knowledge-based system architecture.
3.3.1 Confidence Weighted Voting Block
This component relies on hardware redundancy and
is based on a variant of Majority Voting algorithm
(MV) known as Confidence Weighted Voting
(CWV) (Sun, 2005). This algorithm gives higher
weights to those sensors that are more likely to be
correct (i.e. with higher confidence of correctness).
The confidence value of each sensor can be
determined in a distributed manner by comparing its
sensing results with its sensing neighbours that share
overlapping coverage area. The confidence value of
sensor i is then defined as:
∑
∑
=
=
⋅Δ
=
m
j
ij
m
j
ijij
A
A
iconf
1
1
)(
(1)
where m represents the total number of the sensors
within the sensor network,
⎩
⎨
⎧
=Δ
resultsamethereportjandisensorif;1
resultsdifferentreportjandisensorif;0
ij
(2)
and
⎩
⎨
⎧
=
overlappedisjandisensoroferagecovtheif;1
overlappe
d
notisjandisensoroferagecovtheif;0
A
ij
(3)
The reliable value, obtained using CWV
algorithm for sensor S, having the in-field position
represented in Cartesian coordinates by the pair
(x,y), is the value
}1;0{k
∈
corresponding to:
() () ()
∑
=
δ=
m
1j
jkj
k
y,xCjconfmaxy,xCWV
(4)
where
⎩
⎨
⎧
=δ
kisjsensorfromvaluereporttheif;1
knotisjsensorfromvaluereporttheif;0
kj
(5)
()
⎩
⎨
⎧
=
jsensorbyeredcovis)y,x(intpoif;1
jsensorbyeredcovt'isn)y,x(intpoif;0
y,xC
j
(6)
This CWV Block is an active block in our
strategy only for sensors included in the coverage
zones of other neighbouring sensors, for example
sensor B from figure 2.
KNOWLEDGE BASED SYSTEM FOR RELIABLE PERIMETER PROTECTION USING SENSOR NETWORKS
53
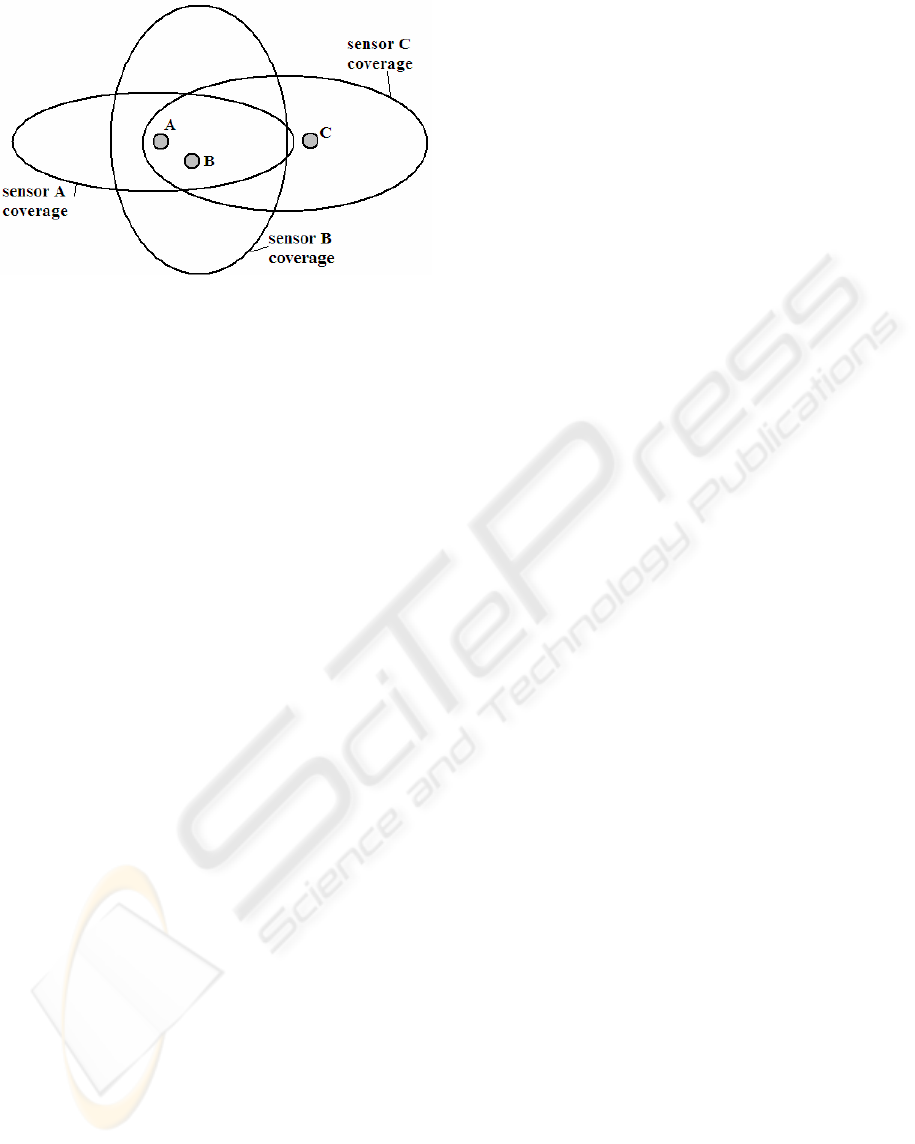
Figure 2: Sensor coverage diagram.
3.3.2 Neural Network Block
In order to assure a higher reliability for the
information provided by the sensor network, even in
the case of low hardware redundancy, we developed
a neural network structure that provides an estimated
value for each sensor, based on the past values
provided by adjacent sensors. This estimate is
compared with the actual sensor value deciding if
this actual value is reliable or not. The neural
network is based on a perceptron, with a number of
binary neurons equal to the number of the network
sensors. The sensor network is perceived in a static
and also a dynamical way. Each neuron is
considered as a binary model for a sensor. It receives
at the sampling moments the weighted and biased
iterative values of the adjacent sensors (neurons) and
computes the estimates. A relevant architecture of
this block is depicted in section 4.
3.3.3 Knowledge Base Block
Based on some assumptions and on past in-field data
concretised in valuable rules, a knowledge base is
established. This knowledge base includes
information like: a) possible values of intruder’s
speed in the sense that detecting an intruder with a
speed higher than a limit value must not be
considered; b) the impossibility for an intruder to be
detected by an inside sensor until the intruder’s
detection by an outside sensor has been reported.
This knowledge base is used only for validation of
the results provided by CWV and Neural Network
Block.
3.3.4 Decision Block
The Decision Block is implemented in our strategy
by the following pseudo-code:
For (every moment t and every sensor S)
do
{
/* follows the implementation of
/* Neural Network Block
Result1(S,t)=ComputeNNB(past values
of neighbouring sensors)
If (hardware redundancy is present)
then
{
/* follows the implementation of
/* CWV Block
Result2(S,t)=ComputeCWV(actual
values from the sensors)
ReliableResult(S,t)=Validate1(
Result1(S,t),Result2(S,t),
rules from Knowledge Base)
}
else
{
ReliableResult(S,t)=Validate2(
Result1(S,t),
rules from Knowledge Base)
}
}
4 CASE STUDY
In this section, static and dynamical models for the
sensor network are proposed, based on the possible
trajectories of a strange object between sensors. A
basic structure of the perceptron implementing the
static and dynamical models of the sensor network is
developed, trained and tested.
Let us consider a field of interest with NxM
binary sensors for perimeter protection. Each sensor
S
A
from the field has other 8 adjacent sensors S
adj,i
,
i=1,…,8, as it is illustrated in figure 3. A cell with 9
sensors is taken into consideration.
A strange object could pass through the cell by
many different directions, each with two senses:
Di,j, i=1,…16, j=1, 2 and combinations of them.
The static model for the sensor network is
illustrated as follows. If an object is situated in a
point P
i
, at an intersection of two directions, a set of
sensor value results: S
Pi
=[S
adj1
, S
adj2
, S
adj3
, S
adj4
, S
A
,
S
adj5
, S
adj6
, S
adj7
, S
adj8
]
i
. For example, if the object is
in the point of intersection between directions D3
and D6 the set of sensor values is [0, 0, 0, 1, 1, 0, 1,
1, 0]. At each intersection of two directions four
adjacent sensors of the intersection are activated,
based on the hardware redundancy. A table of sensor
value sets is created for all points of intersections.
The dynamical model of the sensor network is
illustrated as follows. The values of the sensors are
available at the sample times S(kh), where h is the
sample period. When a strange object passes trough
the network the sensors are activated one after
WINSYS 2007 - International Conference on Wireless Information Networks and Systems
54
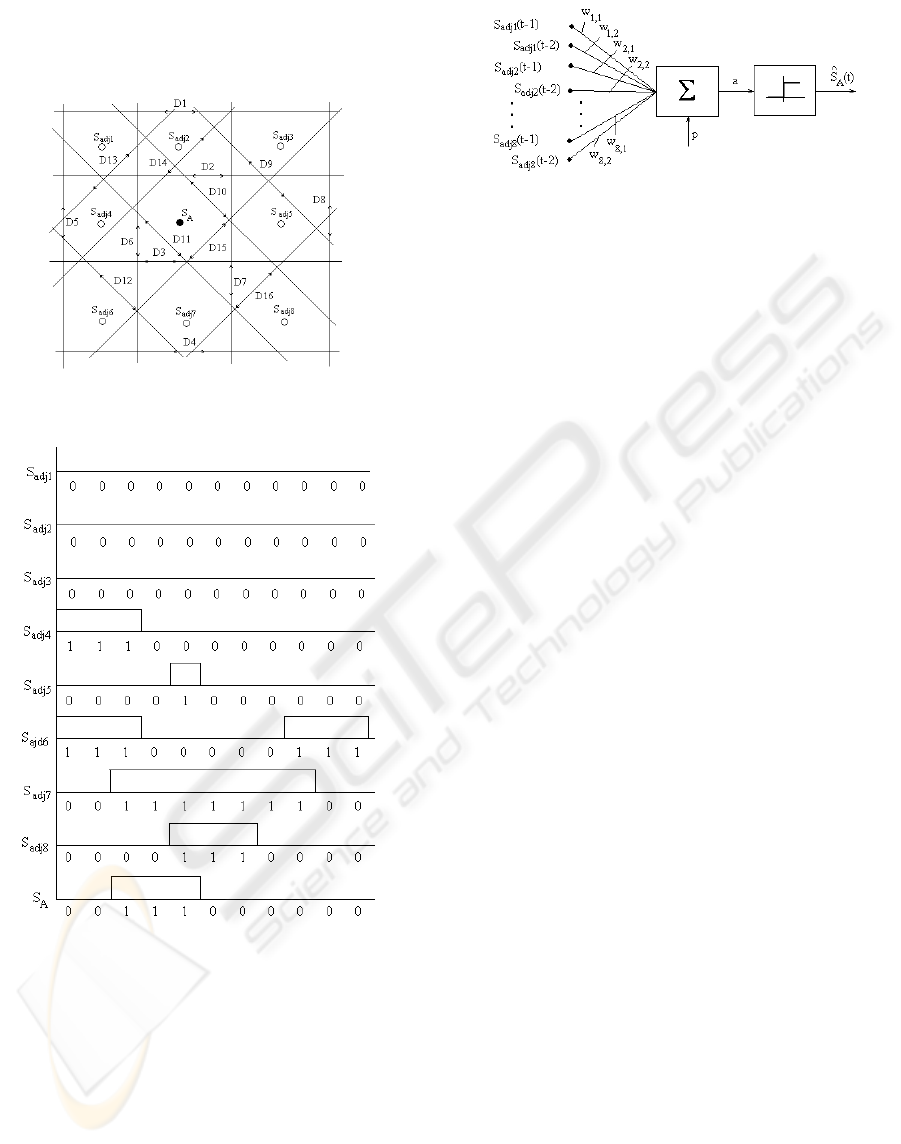
another. So, for a dynamical description of object
movement between sensors, a train of impulses
results. As an example, in figure 4 we represented
the impulse train for trajectory D3,1-D7,1-D4,2.
Figure 3: The cell structure.
Figure 4: Examples of sensor impulse trains.
For a binary sensor modelling we use a neuron
with two values 0 and 1. The neuron is trained to
learn the impulse trains for all the possible
trajectories between sensors. The sensor network
may be modelled as a perceptron with N×M binary
neurons, applying at the neuron inputs the measured
values from the adjacent sensors.
The structure of the neuron for the dynamical
model is presented in figure 5,
Figure 5: Neuron structure for the dynamical model.
where:
∑∑
==
−
+−=
=
8
1i
2
1j
iadjj,i
A
A
^
p)jt(Swa
)a(fS
(7)
For the static position the following relation
defines the neural model:
∑
=
−
+=
8
1i
iadji
pSwa
(8)
The neuron is using the hard-limit transfer
function f
A
(a), which returns 0 or 1. Each input S
adj-
i
(t-j) is weighted with an appropriate weight w
i,j
,
i=1,…8, j=1, 2. The sum a of the weighted inputs is
sent to the hard-limit transfer function f
A
(a), which
also has an input with a value equal to 1, biased by
p. The neuron produces a result, based on the
measured values provided by its adjacent sensors.
The hard-limit transfer function gives the perceptron
the ability to classify input vectors by dividing the
input space into regions. Specifically, outputs will be
0 if the net input a is less than 0, or 1 if the net input
a is 0 or greater.
We can estimate the value of the sensor S
A
at the
moment t, based on the measured values of the
adjacent sensors at the previous two time moments
(t-1) and (t-2).
A supervised learning rule is used as a procedure
to modify the appropriate values of the weights w
and bias p of the perceptron (Hagan, 1996). The
training of the perceptron is made on all possible
trajectories through the sensor network, the
behaviour being summarized by a set of input-output
pairs (u;y) = (S
adj,1
, … , S
adj,8
; S
A
(t)). The
corresponding target y of the perceptron is formed
by the values of the sensor S
A
. The objective of the
neural network training is to reduce the error ε,
which is the difference between the target vector and
the neuron response (the estimate):
AA
S
ˆ
S −=ε
(9)
The desired changes to the perceptron's weights
Δw and bias Δp are calculated, given an input vector
u and the associated training error ε:
KNOWLEDGE BASED SYSTEM FOR RELIABLE PERIMETER PROTECTION USING SENSOR NETWORKS
55
ε+=
ε+=
oldnew
oldnew
pp
uww
(10)
The above perceptron rule is proven to converge
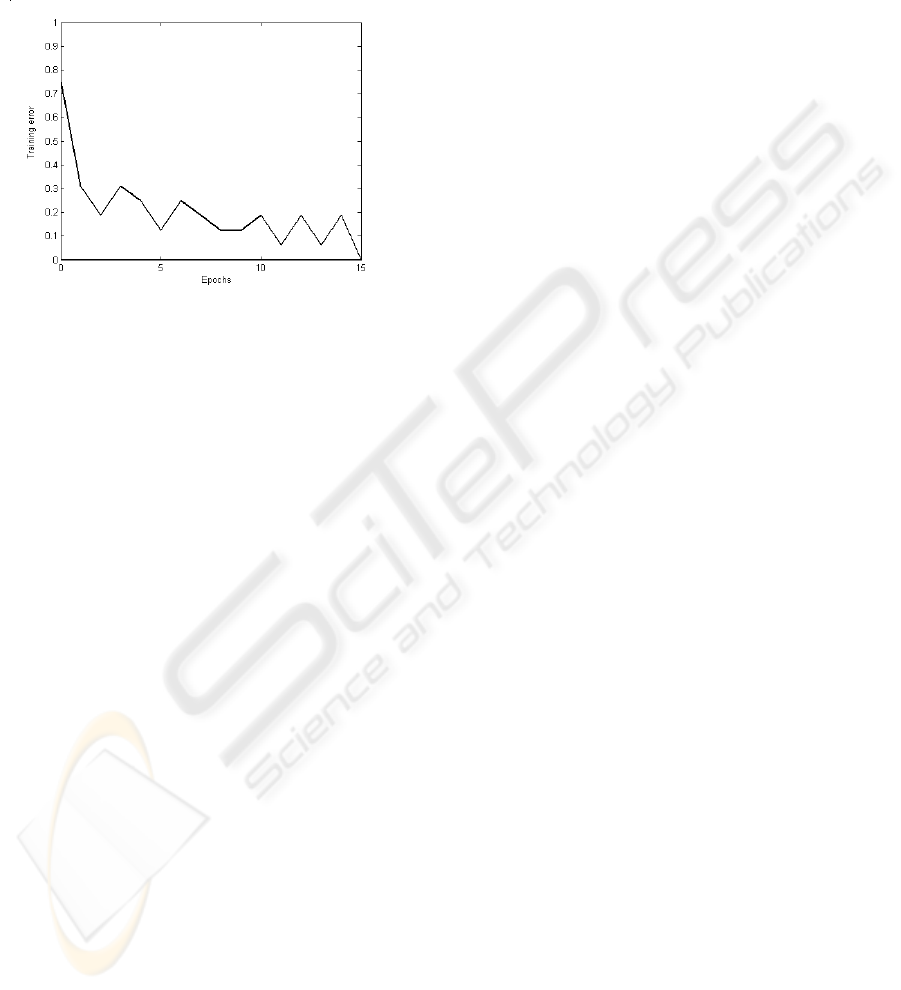
on a solution in a finite number of iterations.
The error obtained after iterative trainings is
presented in figure 6.
Figure 6: The training error.
The neural network was tested with impulse
trains as test sets. The output accurately estimates
the impulse trains for simulated trajectories.
An important result is that the neural network
could be generalized for different possible
trajectories. If the sensor node A is attacked, it is
possible for its output value S
Ac
to be different from
the estimate. So, the sensor’s estimated value,
predicted by the neural network, differs from the
actual value of the malicious sensor A, proving that
something wrong happened to sensor A. In these
circumstances, the decision block will exclude the
sensor A from the network.
5 CONCLUSION
The goal of our research was to design a secure
architecture for a sensor network used for perimeter
protection. For this, we used a knowledge-based
system based on hardware and analytical
redundancy. Considering the detection of anomalies
and intruders in binary sensor networks to be a very
important issue, we relied on two coupled
stratagems: a) a CWV based algorithm; and b) a
perceptron predictor based on the past values of
neighbouring sensors to solve this problem. After
detection, the sensor network can take decisions to
investigate, find and remove malicious nodes if
possible. Being localized on a base station level,
with a reduced amount of computation our method is
suitable even for large-scale sensor networks.
REFERENCES
Akyildiz, I.F., Su, W., Sankarasubramaniam, Y., Cayirci,
E., 2002. Wireless Sensor Networks: A Survey. In
Computer Networks, 38(4), March.
Aslam, J., Butler, Z., Constantin, F., Crespi, V., Cybenko,
G., Rus, D., 2005. Tracking a Moving Object with a
Binary Sensor Network. In Proceeding of the 1
st
International Conference on Embedded Networked
Sensor Systems.
Avancha, S., Undercoffer, J., Joshi, A., Pinkston, J., 2003.
Secure sensor networks for perimeter protection. In
Computer Networks 43, Elsevier Press.
Brooks, R., Ramanathan, P., Sayeed, A., 2003. Distributed
target classification and tracking in sensor networks,
In Proceedings of the IEEE, vol. 91, no. 8.
Cao, Q., Yan, T., Abdelzaher, T., Stankovic, J., 2005.
Analysis of Target Detection Performance for
Wireless Sensor Networks, In Proceeding of the
International Conference on Distributed Computing in
Sensor Networks, CA.
Clouqueur, T., Ramanathan, P, Saluja, K.K., Wang., K.C.,
2001. Value fusion versus decision-fusion for fault
tolerance in collaborative target detection in sensor
networks, In Proceedings of Fusion 2001, Montreal.
Gao, Y., Wu, K., Li, F., 2003. Analysis on the
Redundancy of Wireless Sensor Networks, In ACM
WSNA Proceedings, San Diego, USA.
Feng J., Koushanfar F., Potkonjak M., 2002, System-
Architectures for Sensor Networks Issues,
Alternatives, and Directions, In Proceedings. of the
2002 IEEE International Conference on Computer
Design (ICCD’02), Freiburg, Germany.
Hagan, M.T.; Demuth, H.B.; Beale, M.H., 1996. Neural
Network Design, PWS Publishing, Boston.
Intanagonwiwat, C., Govindan, R., Estrin, D., 2000.
Directed Diffusion: A Scalable and Robust
Communication Paradigm for Sensor Networks. In
ACM International Conference on Mobile Computing
and Networking (MOBICOM’00).
Li, D., Wong, K., Hu, Y.H., Sayeed, A.M., 2002.
Detection, classification, and tracking of targets in
distributed sensor networks. In Signal Processing
Magazine, IEEE, Vol. 19, No. 2.
Nowak, R., Mitra, U., 2003. Boundary Estimation in
Sensor Networks: Theory and Methods. In
Proceedings of the First International Workshop on
Information Processing in Sensor Networks.
Pottie G.J., W.J. Kaiser, W.J., 2000. Wireless Integrated
Network Sensors. In Communications of the ACM,
vol. 43.
Sun, T., Chen, L.-J., Han, C-C., Gerla, M., 2005, Reliable
Sensor Networks for Planet Exploration, ICNSC.
Xu, Y., Heidemann J., Estrin, D., 2001. Georgraph-
informed Energy Conservation for Ad Hoc Routing, In
Proceeding of ACM Mobicom, Rome, Italy.
WINSYS 2007 - International Conference on Wireless Information Networks and Systems
56
