
DEVELOPING A SEMANTIC WEB MATCHMAKER FOR
MULTIMEDIA LEARNING OBJECTS
A Case Study on Creating a Web Service Interface for OO-JDrew
Jinan Fiaidhi, Sabah Mohammed and Marshall Hahn
Department of Computer Science, Lakehead University, 955 Oliver Road, Thunder Bay, Ontario P7B 5E1, Canada
Keywords: Semantic Web, Matchmaking, Learning
Objects, e-Learning.
Abstract: This paper introduces a matchmaker to discover
multimedia learning objects on the semantic Web. The
increase in learning objects and lack of semantic base in search mechanisms of the semantic Web discovery
engine (UDDI) make it difficult for clients to find a required learning object service (LOs). Using metadata
to find distributed educational Web services or LOs that meet one’s functional requirements is only the first
step. LOs requestors may have additional requirements such as presenting a flexible query to find a relevant
multimedia course. The LOs need to employ a matchmaking engine that can process the rules and
conditions of the requesters. This article provides a draft implementation of an Apache Axis matchmaker,
which embeds the OO-jDREW rule-based engine. The developed first prototype provides a lightweight and
customizable reasoner for allocating multimedia LOs courseware presentations.
1 INTRODUCTION
Key to the success of effectively retrieving relevant
services in the future semantic Web is how well
intelligent service mediators may perform semantic
matching in a way that goes far beyond of what
standard service discovery protocols such as UDDI
(http://www.uddi.org/). Existing resource
description and resource selection on the Semantic
Web is highly complicated. Traditional resource
matching, as exemplified by the IMPACT (Smith,
1998), InfoSlenth (Klusch, Fris and Sycara, 2006)
and Retsina/Larks (Klusch and Sycara, 2006) is
done based on symmetric, attribute-based matching.
A matchmaker is a computational software entity
that has access to one or multiple, heterogeneous,
and distributed data and information sources;
proactively searches for, mediates, and maintains
relevant information on behalf of its human users or
other agents, preferably just-in-time. In other words,
it is managing the matching of incoming requests
with advertised services. Most of the available
matchmakers are based on the OWL ontologies and
utilize complicated tools and APIs (Sycara et al,
2001).
The OWL tools and APIs utilize certain type of
reasone
rs (e.g. Jena, F-OWL, CoBrA, Protégé-OWL
API, Racer, Pellet, FaCT). These reasoners are not
quite flexible as well as they have performance
issues (e.g. inconsistencies, misclassifications,
irrelevant query responses)(Liebig et al, 2005).
Obviously we are lacking a lightweight and flexible
reasoning which does not need to be very powerful,
but it should be highly customizable. Actually even
for a complex ontology, the queries processed may
be very simple and can be processed by simpler
reasoners. Then choosing a less powerful, but more
efficient, reasoner provides better performance.
Ontologies can be considered as playing a key part
in the Semantic Web since they provide the
vocabulary needed for semantic mark-up. But rules
are also required for the Web, and most people now
agree that a Web rule language is needed. According
to the Semantic Web stack, rules are on the top of
ontologies. But in many cases, ontologies alone are
not enough. Using rules in conjunction with
ontologies is a major challenge for the Semantic
Web. SeetRules, Flora2, OOJdrew, SWRL, Hoolet,
Jena2, and ROWL are examples of some notable
resoners.
Since our problem combines ontological
inference and matchmaking, we believe that flexible
reasoning methods are necessary. This project
focuses on two areas; 1) embedding OO-jDREW
into an application, and 2) rules and rule-processing
in the LOs domain. The primary focus of the project
is the integration of OO-jDREW into a semantic
Web application that hides the complexities of OO-
287
Fiaidhi J., Mohammed S. and Hahn M. (2007).
DEVELOPING A SEMANTIC WEB MATCHMAKER FOR MULTIMEDIA LEARNING OBJECTS - A Case Study on Creating a Web Service Interface for
OO-JDrew.
In Proceedings of the Second International Conference on e-Business, pages 287-292
DOI: 10.5220/0002106302870292
Copyright
c
SciTePress

jDREW. The inclusion of OO-jDREW is a step
towards defining a shared Rule Markup Language
(RuleML), permitting both forward (bottom-up) and
backward (top-down) rules in XML for deduction,
rewriting, and further inferential-matchmaking tasks.
2 SVG LEARNING OBJECTS
In our earlier work we developed a Java utility
called the Learning Object Presentation (LOP)
Generator, which generates an SVG slideshow
presentation based upon an xml description. This is
the type of LO we will focus on in this paper. The
input file format of this utility is shown in Figure 1.
All data describing the presentation is contained
within the <ss:presentation> tag. In this direction,
the CanCore metadata describing the presentation is
placed within the <ss:cancore> tag. Global
properties such as the transition type ( shift, fade or
none ) can placed under the <ss:properties> tag.
Each slide is described within an <ss:slide> tag. The
delay attribute specifies how long the slide should be
displayed if the slideshow is in “play mode”. Each
slide must have a titlebox and may have one
bodybox and\or one image.
<ss:presentation
xmlns:ss='urn:SLIDESHOW:0-395-36341-6'>
<ss:cancore>...
</ss:cancore>
<ss:properties>
<ss:transition type="fade"
duration="1000" frames="20"/>
</ss:properties>
<ss:slide delay="">
<ss:titlebox>
<ss:title>The Title</ss:title>
<ss:subtitle>Slide1</ss:subtitle>
</ss:titlebox>
<ss:bodybox>
<ss:point>
<ss:text>The Text<ss:text>
<ss:point>...<ss:point> ...
</ss:point>...
</ss:bodybox>
<ss:images>
<ss:image path="p.jpg" x="470" y="160"
width="500" height="550" />
</ss:images>
</ss:slide>
<ss:slide delay="">...
</ss:slide> ...
</ss:presentation>
Figure 1: The XML LOP Input File.
3 OO-JDREW AND RULEML
The OO-jDREW reasoning engine contains two
modes: a Bottom-Up (forward chaining of rules)
version, and a goal driven top-down (backward
chaining of rules) version which works in a fashion
similar to most Prolog systems. The task of
developing reference implementations for RuleML,
which is an evolving standard, is made easier by
using a tool-box approach, which is one of the
design issues for jDREW: the flexibility to quickly
cope with changes to the syntax and required
operations to implement the various semantics.
There are utilities in the jDREW toolbox for various
tasks: reading files of RuleML statements into the
internal clause data structure, storing and
manipulating clauses, unification of clauses
according to the positions of the selected literals, a
basic resolution engine, clause to clause
subsumption and clause to clause list subsumption,
choice point managers, priority queues for various
reasoning tasks, and readable top-level procedures
(Spencer, 2002). An ontological graph is used as a
knowledge representation of the ontology (Biletskiy,
2006).The ontological graph is implemented using
Rule Markup Language (RuleML). The use of
RuleML allows the ontology to flexible, extensible
and platform-independent. So, the ontology can be
easily integrated with other ontologies (Boley,
2003).
4 THE MATCHMAKER
The Multimedia Learning Object Matchmaker
(MLOM) architecture is shown in Figure 1. The
MLOM allows one to find all MLOs meeting
particular criteria. Currently, SVG slideshow
presentations are the only type of MLO supported by
the system. All SVGs are distributed across a
number SVG Web Services. A set of facts
describing each MLO must be stored within
MLOM’s RuleML knowledge base. MLOM’s
remotely callable interface provides a method
through which these facts can be registered. Its
interface also provides a method through which a
Client can send a query in POSL format.
ICE-B 2007 - International Conference on e-Business
288
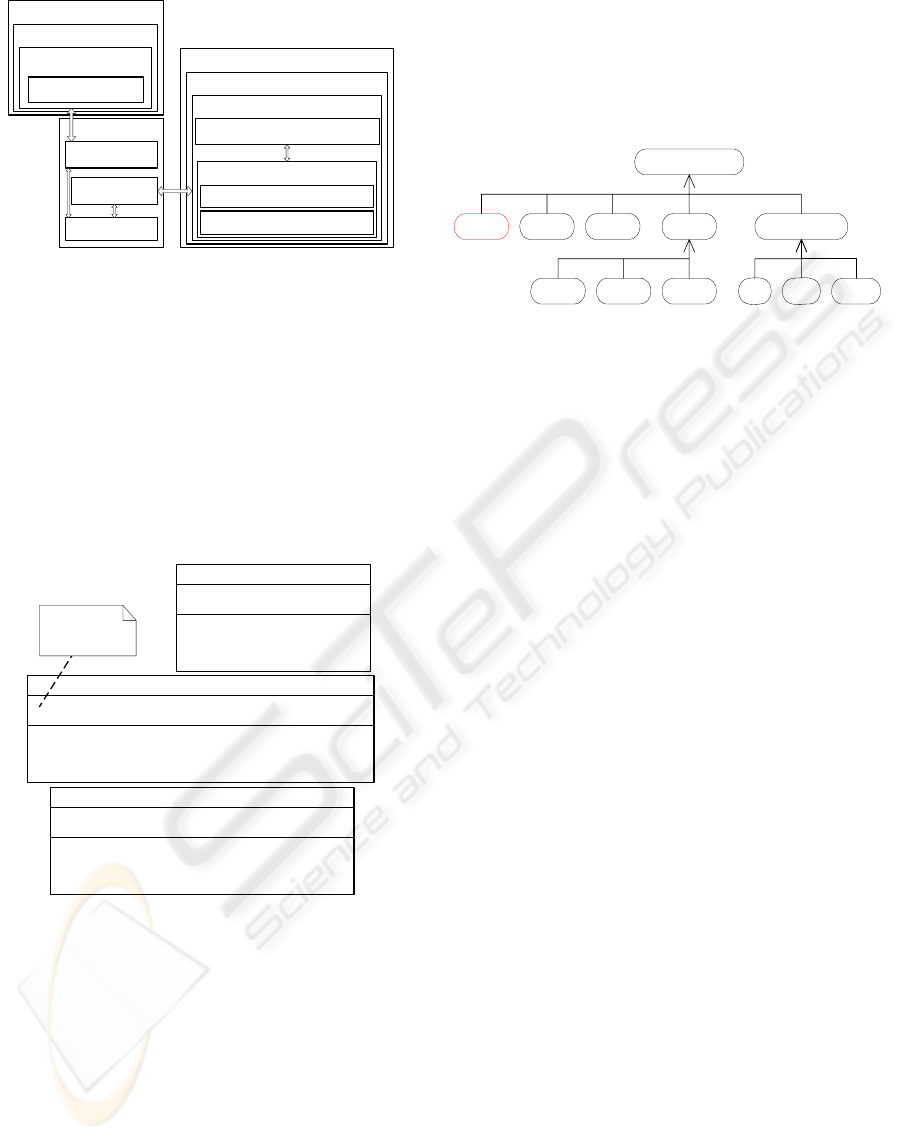
Figure 2: The MLO_Matchmaker Architecture.
Using such a query as the goal, OO JDrew will
determine which set of MLOs are described by the
facts necessary to achieve the goal. The MLOs set
will be returned to the Client after which the user
may choose to view any number of them. All web
services utilize the Apache Axis framework which
runs within an Apache Tomcat web server. Axis
allows one to deploy a Java class as a web service.
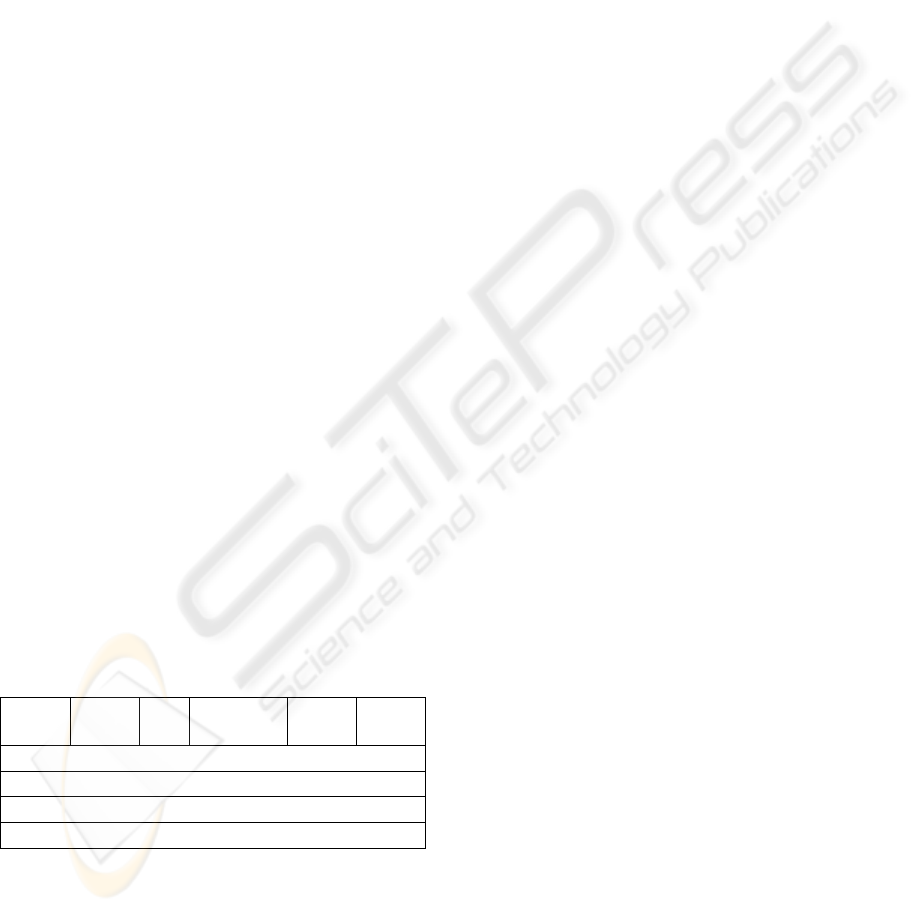
Figure 2 illustrates the class used to create the
MLO_Matchmaker Web Service as well as some of
the components it depends on.
Figure 3: Matchmaker UML Class Diagram.
4.1 The MLO_Matchmaker
Knowledge-Base
For MLO_Matchmaker to be capable of performing
an intelligent MLO search, a domain-specific
knowledge base must be provided. A portion of a
knowledge base representing Java and C++ is shown
in Figure 3. So suppose a presentation had the fact
“for” specified within its metadata. If the goal
controlStructures were sent to MLO_Matchmaker,
OO-jDREW would determine that it is possible to
infer this goal. The MLO_Matchmaker would then
return the SVG’s name, description and other
information to the Client. But how will OO-jDREW
know which facts in the knowledge base belong to
which SVG? Our approach would be best explained
with a simple example. We will use the POSL
short-form syntax for ruleML to save space and for
extra clarity.
Client 1..N
Apache Tomcat
MLO_Matchmaker Web Service
Apache Axis
OO JDrew Backward Reasoner
RuleML KB
Search Domain Rules
Facts describing each SVG
GUI
Axis MM RPC
Axis SVG RPC
Apache Tomcat
SVG Web Service 1..N
Apache Axis
SVG 1 .. N
controlStructures
goto continue break loop
for while Do-while
selectionStructure
if else switch
Figure 4: All rules except goto -> controlStructures apply
to both C++ and Java.
Suppose an SVG presentation named “Java
Control Structures” with name and URL are
“javacs.svg”& “localhost:9080/axis/SVGserver.jws”
respectively. Also assume this presentation
describes only loops. The following set of facts
could be used to represent this presentation:
LearningObject(
name->”Java Control Structures”;
desc->”loops in Java”;
+searchEngine()
+submitQuery(in qstr : String, in maxResults : int) : String[][]
-importPresParam(in qstr : String)
+registerMLO(in name : String, in facts : org.w3c.dom.Document)
-br : jdrew.oo.td.BackwardReasoner
-loSlotValues : String[]
MLO_MatchmakerWS
RuleML KB
+result(in loSlotVars : String[])
+equals(in obj : Object) : boolean
+createResult() : String[]
+addVarValue(in vname : String, in val : String) : boolean
-loSlotValues : String[]
-otherVars : ArrayList
result
+addResult(in res : result) : boolean
+addVarName(in vname : String)
+sortByDifficulty()
+getResults() : String[][]
-solutions : ArrayList
-varNames : ArrayList
results
url->“http://localhost:9080/axis/SVGserver.jws”;
file->”javacs.svg”;
difficulty->“6.5”
pres->”UUID-550e8400-e29b-41d4-a716-446655440000” ).
for( pres->”UUID-550e8400-e29b-41d4-a716-446655440000”).
while( pres->”UUID-550e8400-e29b-41d4-a716446655440000”
).
do-while( pres->”UUID-550e8400-e29b-41d4-a716
446655440000” ).
The url and file slots store the information a
Client needs to retrieve the LO. The difficulty slot is
used to store a number in the range 0.0 – 10.0 meant
to indicate how difficult the presentation is. We use
the pres slot to link all facts related to a presentation
together. OO-jDREW allows a number of goals to
be anded together. Therefore, the following query
can be used to retrive a presentation’s contact
information:
for(pres->?PRES),while(pres-
>?PRES),LearningObject( name->?NAME;desc-
?DESC; url->?URL; file->?FILE;
difficulity->?DIFF;pres->?PRES ).
The variable bindings resulting from this query
are the following:
NAME = ”Java Control Structures”
DESC = ”loops in Java”
URL = “http://localhost:9080/axis/SVGserver.jws”
FILE = “javacs.svg”
DIFFICULTY = “6.5”
DEVELOPING A SEMANTIC WEB MATCHMAKER FOR MULTIMEDIA LEARNING OBJECTS - A Case Study on
Creating a Web Service Interface for OO-JDrew
289
PRES = ”UUID-550e8400-e29b-41d4-a716
446655440000”
The presentation can now be retrieved by the
Client based upon the URL and filename.As another
example, suppose the query was the following:
controlStructure( pres->?PRES ),LearningObject(
name->?NAME; desc-?DESC; url->?URL; file-
>?FILE; difficulity->?DIFF; pres->?PRES ).
This goal can be inferred given a LearningObject
fact and the following rules:
controlStructure( pres->?PRES ) :- loop( pres-
>?PRES ). loop( pres->?PRES ) :- for( pres->?PRES ).
4.2 The Matchmaker Class
As previously mentioned, the MLO_Matchmaker
class is designed to be deployed as an Apache Axis
Web Service. When Axis creates an object of this
class, its constructor will load the rdfs types file
found in the TOMCAT_PATH\bin folder into the
OO-jDREW type system. It will also load all
ruleML documents found at
TOMCAT_PATH\bin\metadata into the
jdrew.oo.td.BackwardReasoner instance member.
The facts related to each registered SVG are placed
into a separate file so that they can be updated more
easily.
MLOM’s registerLO method takes as its first
argument the name of an SVG and as its second
argument a ruleML document describing the SVG.
It will create a copy of the document in the
TOMCAT_PATH\bin\metadata directory.
MLOM’s submitQuery method takes a POSL
query string as its first argument and an integer
specifying the maximum number of results to return
as its second argument. Its return type is an array of
String arrays. The first String array stores the names
of the variables found in the query. Each subsequent
String array stores a query solution(see Table 1).
Table 1: The Return Query Format.
Name, description, url, filename, and difficulty
are always returned as the first five columns whether
they were specified in the query or not. This is done
to ensure (1) an entry for each learning object found
is always listed and (2) that the information needed
to retrive the LO associated with a result is always
present. The following steps are carried to generate a
query’s results:
STEP 1: Query preprocessing.
The query is preprocessed via a call to method
importPresParam, which will insert things into the
query string that are considered implicit. Recall the
following query:
for(pres->?PRES),while(pres-
>?PRES),LearningObject( name->?NAME;desc-
?DESC; url->?URL; file->?FILE;
difficulity->?DIFF;pres->?PRES ).
The user doesn’t have to actually enter all that to
perform a search. The user only has to enter the
following:
for(),while().
The above example illustrates that after
preprocessing, (1) pres->?PRES is inserted into all
slotted predicates to ensure that a solution’s variable
bindings will all be related to the same LO and (2)
the values of all LearningObject slots will be
retrieved by the query. Regarding the latter, the user
may override the default variable names used:
?NAME, ?DESC, and so on. In any case, the
variable names used are saved into
MLO_Matchmaker’s loSlotValues instance member.
STEP 2: Parse the query into a DefinateClause
instance. The following code will perform this task:
POSLParser pp = new POSLParser();
DefiniteClause dc = pp.parseQueryString(qstr);
STEP 3: Generate and return the query results.
Each solution’s variable bindings are stored in a
result instance. A call to addVarValue will add a
variable’s binding to the result. Based on
information contained MLOM’s loSlotValues
instance member obtained via result’s constructor,
the method can determine whether or not the
variable is used within an LO predicate slot. If yes,
the method returns true. All results are stored in
results a instance. These objects have special names
for each LO predicate slot hard-coded within them
such as Name, Description, and so on. Any other
variable names must be added manually via a call to
addVarName. A call to addResult is used to add a
result to the results list. The method returns true if
the result is not duplicate of some result already in
the list. Duplicates arise when there is more than
one way to infer an LO meets the criteria of the
search. Since the Client is not aware of logic OO-
jDREW used to arrive at its decisions, duplicate
results are suppressed.
4.3 Sharing Rules
OO-jDREW allows the type of a variable to be
specified. Two variables will only unify if they have
the same type or if one of the types is a subclass of
Name Desc. url filename Diff. Other
0...N
Solutions one’s bindings for each variable
Solutions two’s bindings for each variable
…
Solutions M’s bindings for each variable
ICE-B 2007 - International Conference on e-Business
290
the other type, assuming that the other conditions
needed for unification have been met. We need not
rely on OO JDrew’s built-in types alone. User
defined types can be created. These types must be
loaded from an rdfs document. We utilize this
mechanism to share rules between languages. The
idea is to assign one of the following types to the
variable used in the pres slot of all rules and facts:
Language, Java or Cpp. Our input rdfs document is
shown below:
+getSVG( String filename )() : org.w3c.dom.Document
-doc : org.w3c.dom.Document
SVGWebService
<rdf:RDF xmlns:rdf="http://www.w3.org/1999/02/22-
rdf-syntax-ns#"
xmlns:rdfs="http://www.w3.org/2000/01/rdf-schema#">
<rdfs:Class rdf:ID="Language"/>
<rdfs:Class rdf:ID="Java"> <rdfs:subClassOf
rdf:resource="Language"/> </rdfs:Class>
<rdfs:Class rdf:ID="Cpp"> <rdfs:subClassOf
rdf:resource="Language"/> </rdfs:Class>
</rdf:RDF>
Suppose that two SVG presentations have been
registered and that one deals with Cpp and one with
Java. Assume that while loops do not exist in Java
and that the Java presentation’s metadata mistakenly
states that the presentation covers Java while loops.
If we ignore the LearningObject facts for simplicity,
a possible knowledge base would be the following:
while(pres->”UUID-550e8400-e29b-41d4-a716-
446655440000”:Cpp ).
while(pres->”UUID-234e4354-fr43-4334-a755-
126655333000”:Java ).
controlStructure( pres->?PRES:Language ) :- loop( pres-
>?PRES:Language ).
loop( pres->?PRES:Language ) :- while( pres-
>?PRES:Cpp ).
The query controlStructure( pres->?PRES:Cpp )
would succeed. However the query
controlStructure( pres->?PRES:Java ) would fail,
since the PRES variable in the predicate while( pres-
>?PRES:Cpp ) cannot unify with while( pres-
>”UUID-234e4354-fr43-4334-a755-
126655333000”:Java ) because the types do not
match. As a result, the rule loop( pres-
>?PRES:Language ) :- while( pres->?PRES:Cpp ) is
properly limited to the C++ language only.
4.4 LO SVG Web Service
Class SVGWebService is designed to be deployed as
an Apache Axis web service and is shown in Figure
5. Its only method will return the SVG document
indicated by the argument. The method expects to
find all available SVGs in the
TOMCAT_PATH\bin\svg folder.
Figure 5: The LO SVG Web Service.
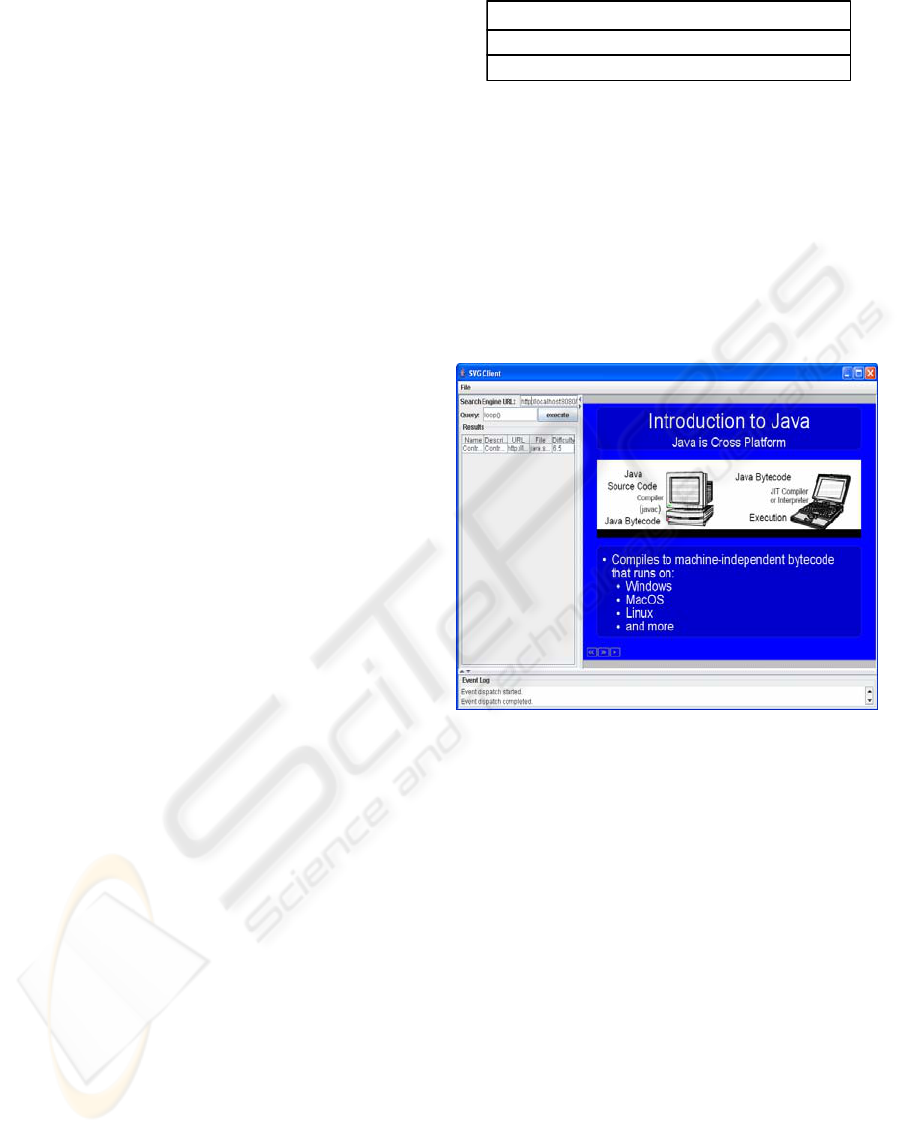
4.5 The Client
A screen shot of the Client’s GUI is shown in Figure
4. Queries can be entered in the query textbox. The
execute button can be pressed to execute the query.
If the query is successful, its results will be listed
below the query textbox. Any SVG in the results list
can be retrieved and viewed by double clicking that
results entry in the list.
Figure 6: The Matchmaker GUI.
All code needed to communicate with an axis
web service has been placed into a package called
axisRPC. The content of this package is shown in
Figure 6. The axisRPC class contains a collection of
objects (some from the Axis libraries ) needed to
carry out a remote procedure call to a RPC style web
service. Its constructor takes three arguments: the url
of the web service, the service name and the port
name. The service name and port name can be
determined by an examination of the WSDL
document describing the web service you wish to
call. An instance of axisMM can be used to submit
a query to the MLO_Matchmaker web service. Its
constructor takes the url of the web service and will
initialize the axisRPC object it inherits from with the
appropriate service name and port name. An
instance of axisSVG can be used to retrieve an SVG
from an SVG web service. Its getSVG method will
call the getSVG method of the web service indicated
by the url passed to its constructor.
DEVELOPING A SEMANTIC WEB MATCHMAKER FOR MULTIMEDIA LEARNING OBJECTS - A Case Study on
Creating a Web Service Interface for OO-JDrew
291
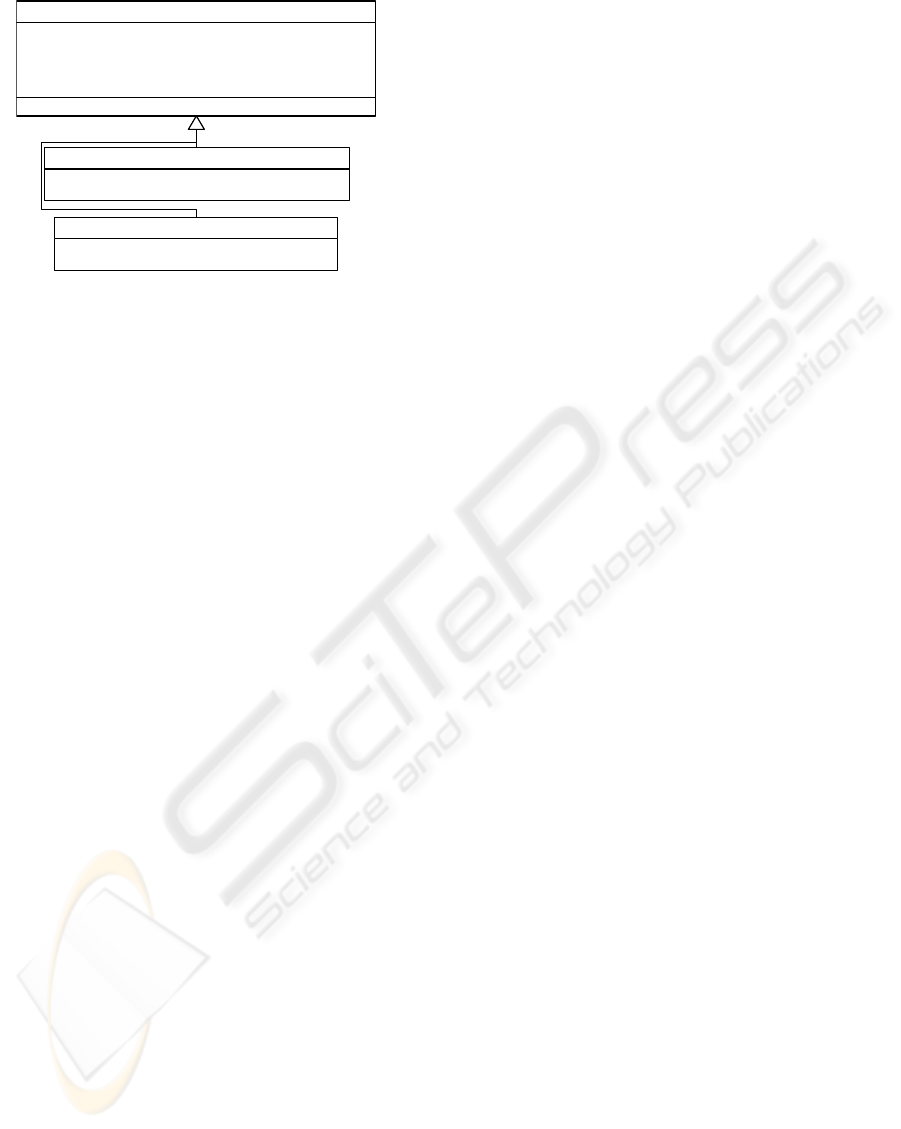
Figure 7: The Axis Mediator Part of the Client.
4 EXAMPLES OF QUERIES
Suppose that three LOs have been registered and
that they are described by the following metadata
(omitting the desc, url and file slots ):
for( pres->”UUID-550e…”)
while( pres->”UUID-550e…”)
doWhile ( pres->”UUID-550e…”)
LearningObject( name->”Repetition in Java”; difficulty-
>”6.5”; pres->”UUID-550e…”:Java )
selectionStructure ( pres->”UUID-770e…”)
LearningObject( name->”Selection in Java”; difficulty-
>”5.5”; pres->”UUID-770e…”:Java )
for( pres->”UUID-660e…”)
while( pres->”UUID-660e…”)
doWhile ( pres->”UUID-660e…”)
LearningObject( name->”Repetition in C++”;
difficulty->”7.5”; pres->”UUID-660e…”:Cpp)
The following query would return all LOs:
controlStructures()
The following query would return the LO related
to C++: LearningObject( pres->?PRES:Cpp )
The following query would return the LO related
to Java that deals with for loops:
for(), LearningObject( pres->?PRES:Java )
The following query would return the two LO’s
dealing with loops: loop()
The following query would return nothing since
there are no presentations dealing with both
selection structures and loops:
selectionStructure(),loop(),
LearningObject( pres->?PRES:Language )
The query contains( ?N, “in” ), LearningObject(
name->?N ) would fail because OO-jDREW’s
contains built-in rejects variable parameters.
Likewise, the query greaterThan( ?DIFF, “5.0” ),
LearningObject( difficulty->?DIFF ) would also fail
for the same reason. OO-jDREW’s extensible built-
in architecture makes it possible to define new built-
ins that would make the above two queries possible.
+axisRPC(in url : String, in serviceName : String, in portName : String)
#url : URL
#serviceName : QName
#portName : QName
#service : Service
#call : Call
axisRPC
+axisSE(in url : String)
+submitQuery(in qstr : String, in maxResults : int) : String[][]
axisMM
+axisSVG(in url : String)
+getSVG(in filename : String) : org.w3c.dom.Document
axisSVG
5 CONCLUSIONS
Using rules in conjunction with ontologies is a major
challenge for the Semantic Web. This paper propose
an approach for reasoning with RuleML/ POSL
rules and ontologies expressed by CanCore
metadata. The reasoning is focused on matchmaking
between learners and learning objects. Apache Axis
has been used as a communication mediator. The
learning objects are considered to be web services
representing multimedia SVG presentations.
REFERENCES
Biletskiy Y., Boley H., Zhu L. 2006. A RuleML-Based
Ontology for Interoperation between Learning Objects
and Learners. UCFV Research Review, Issue 1.
Available: http://journals.ucfv.ca/ojs/rr/
Boley, H., 2003. Object-Oriented RuleML: User-Level
Roles, URI Grounded Clauses, and Order-Sorted
Terms, , In Proc. Rules and Rule Markup Languages
for the Semantic Web (RuleML). Sanibel Island,
Florida, LNCS 2876, Springer-Verlag.
Klusch, M, Sycara, K. 2001. Brokering and Matchmaking
for Coordination of Agent Societies: A Survey. In
Coordination of Internet Agents, A. Omicini et al.
(eds.), ISBN 3-540-41613-7, Springer
Klusch, M., Fries, B., Sycara, K., 2006. Automated
Semantic Web Service, Discovery with OWLS-MX.
Proceedings of 5th International Conference on
Autonomous Agents and Multi-Agent Systems
(AAMAS), Hakodate, Japan, ACM Press.
Klusch, M, Sycara, K. 2000. Brokering and Matchmaking
for Coordination of Agent Societies: A Survey. In
Coordination of Internet Agents, Springer.
Liebig T., Luther M., Noppens O., Paolucci M., Matthias
W., Henke F., 2005. Building Applications and Tools
for OWL Experiences and Suggestions, Workshop on
OWL Experiences and Directions 2005, Ireland.
Sycara, K., Widoff, S., Klusch, M., Lu, J. 2001. LARKS:
Dynamic Matchmaking Among Heterogeneous
Software Agents in Cyberspace. Journal on
Autonomous Agents and Multi-Agent Systems,
Kluwer Academic, vol. 4 (4).
Spencer B., 2002. The Design of j-DREW: A Deductive
Reasoning Engine for the Web
, , In Proceedings of the
First CologNET Workshop on Component-Based
Software Development and Implementation
Technology for Computational Logic Systems. CBD
ITCLS, Madrid. Sep 20, pp. 155-166.
ICE-B 2007 - International Conference on e-Business
292
