
A FUZZY PATH FINDING ALGORITHM BASED ON
ARTIFICIAL POTENTIAL FIELDS
Răzvan Tudor Tănasie
Software Engineering Department, Faculty of Automation, Computers and Electronics
University of Craiova, Bvd. Decebal, Nr. 107, Craiova, Romania
Dorian Cojocaru
Mechatronics Department, Faculty of Automation, Computers and Electronics
University of Craiova, Bvd. Decebal, Nr. 107, Craiova, Romania
Keywords: Path finding, fuzzy systems, collision avoidance, movement simulation.
Abstract: This paper will present a path finding algorithm based on a fuzzy system for a time dependent problem. The
fuzzy system uses singleton fuzzifier, product inference engine and center average defuzzifier. The
algorithm considers a static environment (the obstacles are not moving). The inputs are the space map,
which is split in squares (considered as the basic motion elements), the initial position of the wanderer and
the positions of the obstacles and the target. The algorithm computes, if possible, a path from the position of
the wanderer to the target, and uses the artificial potential field approach to compute weights for each of the
possible future positions of the wanderer. It is implemented in Microsoft Visual C++ and uses DirectX 9.0
libraries.
1 INTRODUCTION
Path finding is an important aspect of many domains
like robotics, game programming and any kind of
movement simulations. The idea of a path finding
algorithm is basically simple: given a moving object
(that will be called wanderer) in a space, a target that
object has to reach, the space map and a set of
constraints, the wanderer has to reach the target and,
while moving, it has to satisfy the constraints.
This paper will present a path finding algorithm
based on a fuzzy system for a time dependent
problem. It considers a static environment (the
obstacles are not moving). The inputs are the space
map, which is split in squares (considered as the
basic motion elements), the initial position of the
wanderer and the positions of the obstacles and the
target. The algorithm computes, if possible, a path
from the position of the wanderer to the target, and
uses the artificial potential field approach to
compute weights for each of the possible future
positions of the wanderer (Khatib, 1986).
2 FUZZY PATH FINDING
ALGORITHM
The algorithm computes the path for the wanderer in
a static environment (the obstacles don not change
their initial position) (Barraquand, 1991).
Based on the dimensions of the environment, an
n x m location map is constructed. Each location can
be:
The wanderer;
The target;
Free location;
An obstacle.
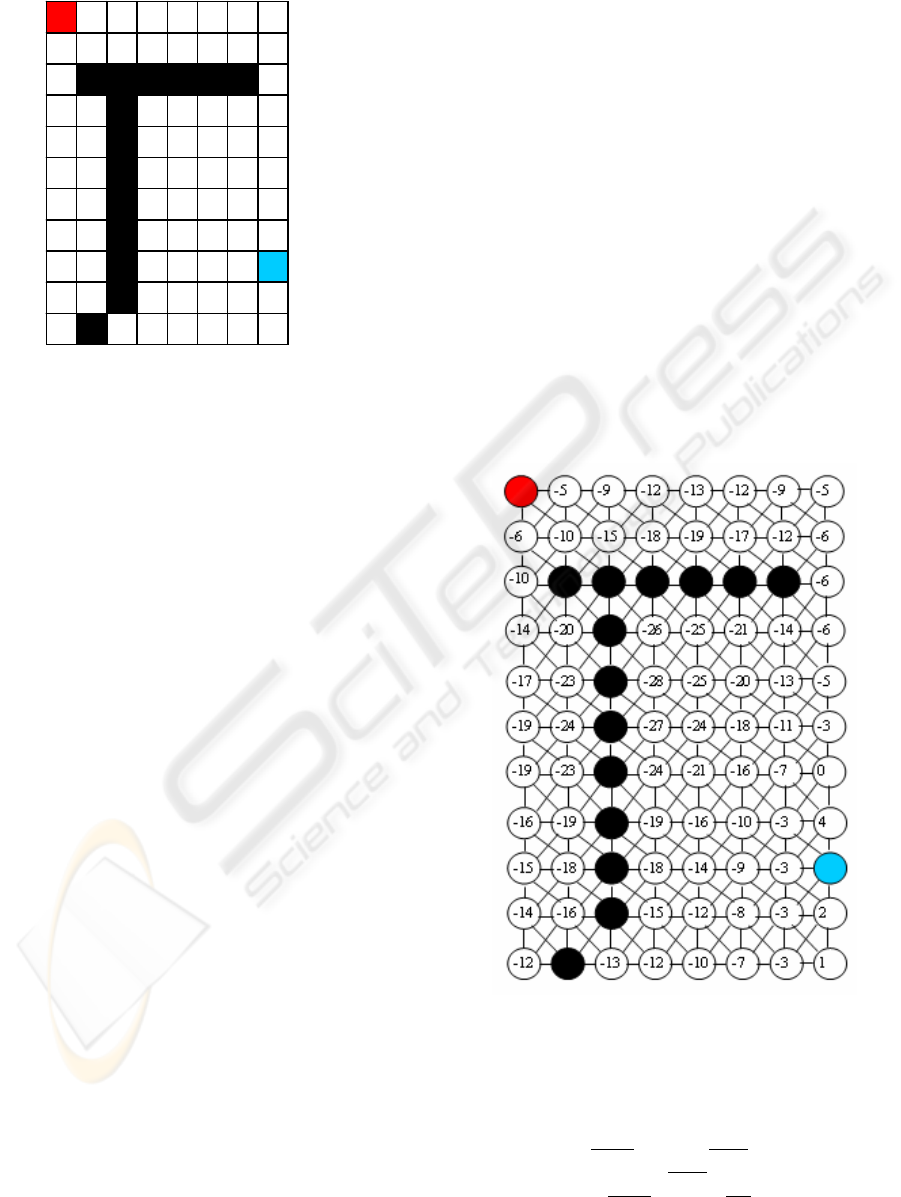
The locations are considered squares, and their
dimension is equal to the wanderer step. The map
can also be implemented as a mesh graph
(Jungnickel, 2004). An example of such a map is
presented in Figure 1, where a black location
denotes an obstacle, a red location represents the
target, a blue location – the wanderer and a blank
location - a vacant space.
229
Tudor T
ˇ
anasie R. and Cojocaru D. (2007).
A FUZZY PATH FINDING ALGORITHM BASED ON ARTIFICIAL POTENTIAL FIELDS.
In Proceedings of the Second International Conference on Computer Graphics Theory and Applications - AS/IE, pages 229-232
DOI: 10.5220/0002083002290232
Copyright
c
SciTePress
Due to the fact that the obstacles are not moving,
the collisions can be avoided, but the algorithm can
not guarantee that the target will be reached. It will
end with success only if there exists at least one way
from the initial position of the wanderer to the
target.
2.1 Artificial Potential Fields
The algorithm proposed is based on the principle of
artificial potential field, more exactly, on attraction
and repulsion forces.
The scope of the wanderer is to reach the target.
This target is like an attraction pole for it, while the
obstacles are repulsion poles. In order to illustrate
this in the path finding algorithm, the target is
considered to generate an artificial field which
induces an attraction force F
a
, while the obstacles
generate repulsion fields that induce repugnance
forces F
r
. These forces are strongest near their
generator, and grow weaker while moving away
from it.
Three main ideas illustrate how these forces
work and how they generate each map position
weight:
The main goal is reaching the target:
ar
FF <
(1)
The repulsion forces are cumulative (p is the
number of obstacles in the operation space):
∑
=
=
p
i
i
rr
FF
0
(2)
Each node (position) weight is given by the
composition of all the forces applied to it (W
l
represents the weight of node l, F
a
l
is the attraction
force generated in node l and F
r
l
is the summed
repulsion force generated in node l):
∑
=
+=+=
p
i
li
r
l
a
l
r
l
al
FFFFW
0
,
(3)
An example of a weighted mesh graph for the
map in Figure 1 is shown in Figure 2.
2.2 Fuzzy Rule Base
The fuzzy system is basically based on these
weights. That is, the rules composing the fuzzy rule
base are related to the weights. The wanderer makes
his decision considering the weights.
The fuzzy system contains six rules, each of
them presenting one possible situation that the
wanderer may encounter. Before applying the fuzzy
system, a simple route to the target is constructed
disregarding the obstacles (it can be the direct road
to the target). In fact, only the next step may be
computed, the others having no importance.
The six rules proved to be sufficient to
implement an efficient fuzzy path finding algorithm.
The fuzzy rule base was designed as follows:
IF X is small
and T is right
THEN Y is right
(4)
IF X is small
and T is left
(5)
Figure 1: An example of a map.
Figure 2: Weighted graph.
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
230
THEN Y is left
IF X is big and T is straight
THEN Y is straight
(6)
IF X is small
and T is straight and
X
l
is big THEN Y is left
(7)
IF X is small
and T is straight and
X
r
is big THEN Y is right
(8)
IF X is small and T is straight and
X
r
is big and X
l
is big THEN Y is right
(9)
where X denotes the weight of the next node on the
initial path, X
l
- the weight of the next node’s left
neighbor with respect to the current movement
direction, X
r
- the weight of the next node’s right
neighbor with respect to the current movement
direction, T is the angle between the vector
indicating the current movement direction and the
vector current position-target, Y is the angle for the
next step computed by the fuzzy system.
The angles are measured with respect to the
positive sense of Ox in a trigonometric sense. The
angular differences for the motion are computed
respecting clockwise orientation.
After each step, a new unconstrained path (or
next step) is constructed.
The rules basically act in the following way:
if the next supposed position (before applying
the fuzzy system) is under a great influence
from repulsion forces (it has a small weight)
and the target is situated to the right or left of
the current movement direction, move that
way (first two rules);
if the next supposed position has a small weight
and the target is on the current movement
direction, move left or right (45
o
) depending
on which neighbor is less influenced by
repulsion fields; if the both have big weights
(i.e. the target is straight ahead, but on that
path there are a series of obstacles and there
are not other obstacles in the scene), then the
wanderer is instructed to move right (it was a
random decision, both ways having the same
result) (last three rules);
if the target is on the current movement
direction and the next supposed position is
almost under no influence from the repulsion
forces, then the wanderer is instructed to keep
the current direction (3
rd
rule).
In a fuzzy system like this one, each rule adds its
influence to the final result (Yen, 2000), specifically
it adds (or subtracts) a few (or many depending on
the degree of satisfaction of that rule for the current
input) degrees to the angle that indicates the next
step to be taken. The result may very possible be
different from an accessible direction (in a square
based map, only angles that are multiply of 45
o
indicate one step neighbors). The next position will
be chosen as the possible direction closest to the
computed value.
2.3 Fuzzy Sets and Their Membership
Functions
It can be observed from the fuzzy rule base that the
system uses five fuzzy sets that have the linguistic
labels left, right, straight, small and big.
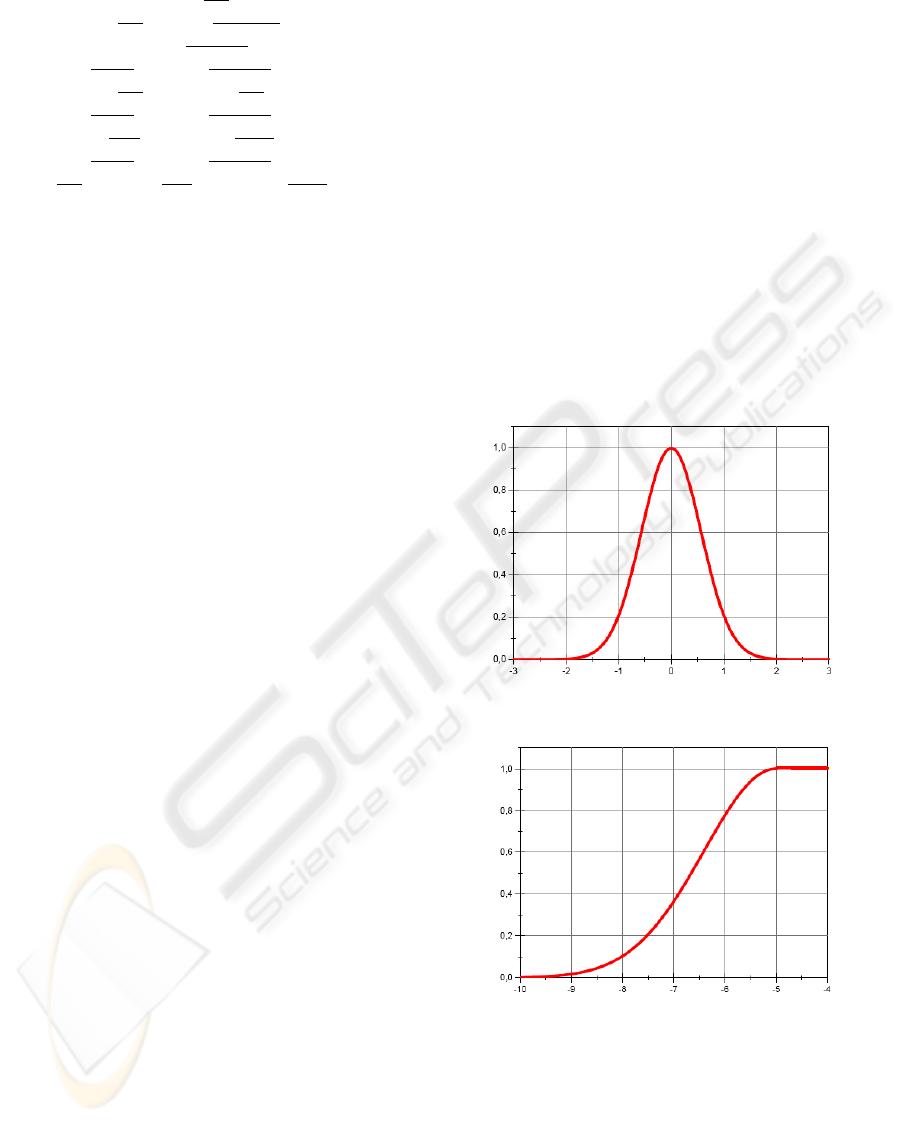
The five fuzzy sets are divided in two categories:
left, right, straight (Figure 3) – define
angles,
[
]
π
π
,
−
∈
x ;
big (Figure 4), small – define weights
[
]
∞
−
∞
∈
,x .
The membership functions from the first
category have a Gaussian bell form, thus probability
density functions have been chosen to represent
them (Buckley, 2005). For the second category
fuzzy membership functions, cumulative distribution
Figure 3: straight membership function.
Figure 4: big membership function.
A FUZZY PATH FINDING ALGORITHM BASED ON ARTIFICIAL POTENTIAL FIELDS
231
or partial probability density functions are more
appropriate.
The chosen membership functions are:
()
2
2
x
exstraight
⋅−
=
π
(10)
()
2
2
2
⎟
⎠
⎞
⎜
⎝
⎛
+⋅−
=
π
π
x
exleft
(11)
()
2
2
2
⎟
⎠
⎞
⎜
⎝
⎛
−⋅−
=
π
π
x
exright
(12)
()
()
⎪
⎩
⎪
⎨
⎧
−<
−≥
=
+⋅−
r
F
Fx
r
Fxe
Fx
xbig
r
r
,
,1
2
2
2
π
(13)
()
()
⎪
⎩
⎪
⎨
⎧
⋅−>
⋅−≤
=
⋅+⋅−
a
F
Fx
a
Fxe
Fx
xsmall
r
a
2,
2,1
2
2
22
π
(14)
2.4 Defuzzification
The proposed algorithm uses singleton fuzzifier,
product inference engine, and center average
defuzzifier. From equations 12, 13 and 14 it results
that the fuzzy set straight has the center 0, the left
and right have the centers
2
π
− and, respectively
2
π
.
Based on the value obtained from the
defuzzifier, the next position is determined as the
nearest to that value.
3 CONCLUSIONS
Path finding is an important aspect of many domains
like robotics, game programming and any kind of
movement simulations.
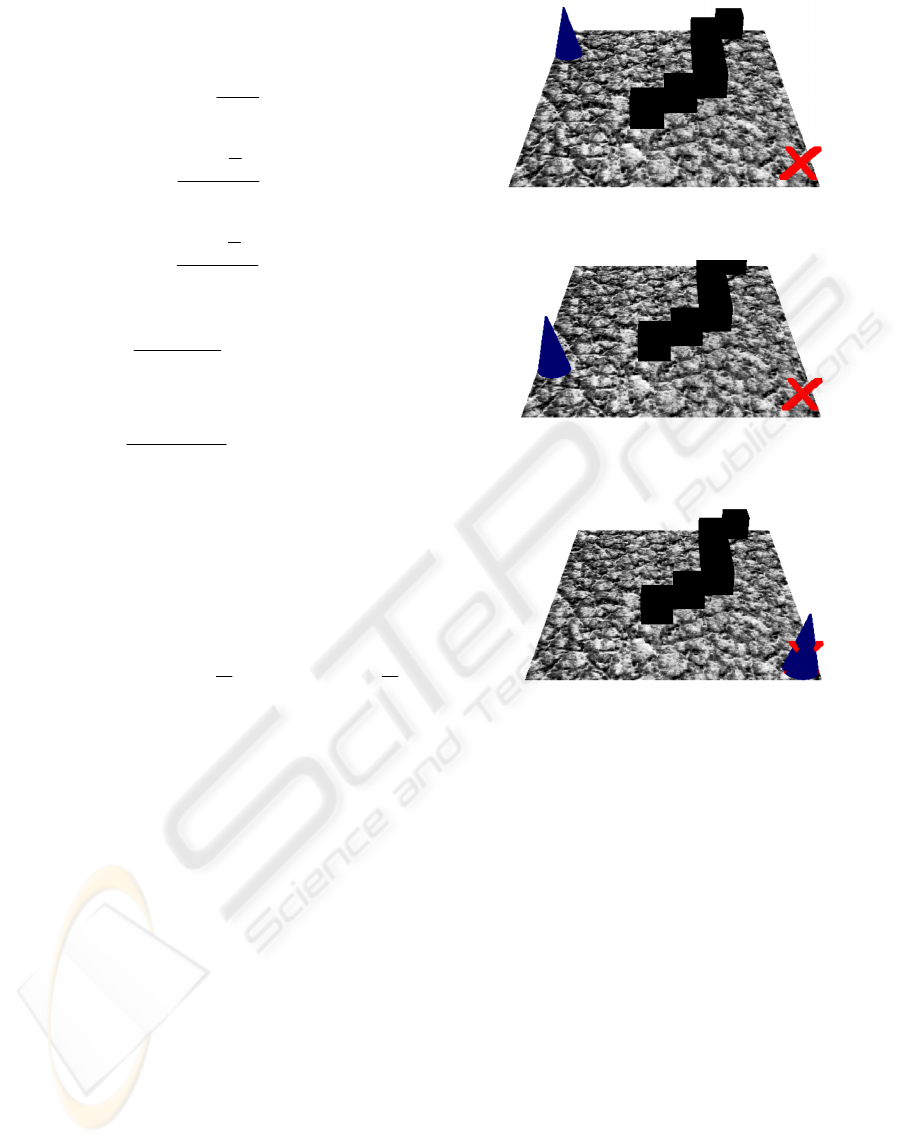
This paper presented and simulated a path
finding algorithm based on a fuzzy system
(Surmann, 1996). It considered only a static
environment. The inputs are the space map, which is
split in squares, the initial position of the wanderer
and the positions of the obstacles and the target. The
algorithm computes, if possible, a path from the
position of the wanderer to the target, and uses the
artificial potential field approach to compute weights
for each of the possible future positions of the
wanderer. The results of a test from the algorithm
implementation in DirectX (Sanchez, 2000) are
presented in figures 5-7.
REFERENCES
Barraquand, J., Latombe, J.C., 1991, Robot motion
planning: a distributed representation approach, The
International Journal of Robotics Research.
Buckley, J., 2005, Studies in Fuzziness and Soft
Computing, Springer, Berlin.
Jungnickel, D., 2004, Graphs, Networks and Algorithms,
Springer, 2
nd
edition.
Khatib, O., 1986, Real-time Obstacle Avoidance for
Manipulators and Mobile Robots, International
Journal for Robotics Research, (5)1, p90-98.
Sanchez, J., Canton, M., 2000, DirectX 3D Graphics
Programming Bible, IDG Books Wordwide.
Surmann, H., Huser, J., Wehking, J., 1996, Path planning
for a fuzzy controlled autonomous mobile robot, Fifth
IEEE International Conference on Fuzzy Systems,
New Orleans.
Yen J., Langari R., 2000, Fuzzy logic, intelligence, control
and information, Prentice Hall, New York.
Figure 6: Intermediate position.
Figure 5: Initial position.
Figure 7: Final position – target reached.
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
232
