
GPU-BASED CELL PROJECTION FOR LARGE STRUCTURED
DATA SETS
Andr´e Maximo, Ricardo Marroquim, Ricardo Farias and Claudio Esperanc¸a
Universidade Federal do Rio de Janeiro - UFRJ / COPPE, Brazil
Keywords:
Direct volume rendering, gpu programming, cell projection, large volumetric data.
Abstract:
We present a practical implementation of a cell projection algorithm for interactive visualization of large
volumetric data sets using programmable graphics cards. By taking advantage of the data regularity, we can
avoid computing some steps of the original algorithm with no quality loss. Furthermore, performance is
increased since more than half the processing time is dedicated only for rendering. We also provide two tools
for better user interactivity, one for transfer function editing and another for volume clipping. Our algorithm
generates high quality images at a rendering speed of over 5.0 M Tet/s on current graphics hardware.
1 INTRODUCTION
A challenging problem in medical and scientific visu-
alization is the interactive rendering of large 3D data
sets. In medical imaging, for example, most data sets
are regular (or structured) grids, usually ranging be-
tween 256
3
and 512
3
voxels. An interactive visualiza-
tion system is very important when analysing these
data sets. Efficiency is crucial for time-critical diag-
nostics, as well interactive manipulation of the vol-
ume data.
On the other hand, irregular (or unstructured)
grids are typically used in scientific visualization such
as geological inspection, fluid simulation, among oth-
ers applications. Nevertheless, by applying a pre-
processing step, irregular data can be adapted to a reg-
ular grid. This process, known as voxelization (Kauf-
man and Shimony, 1986) (Prakash and Manohar,
1995), typically undersamples or oversamples some
portions of the volume. Better sampling strategies
have been proposed by (LaMar et al., 1999) (I. Boada,
2001) to improve the quality of the output grid.
Conversely, approaches capable of handling irreg-
ular grids, such as the Projected Tetrahedra (PT) algo-
rithm, can be easily applied to structured data, since
uniformly sized voxels may be regarded a special case
of the more general irregular grids. This, however, is
generally a bad idea since much of the computation in
such algorithms is dedicated to classifying and orga-
nizing voxels.
We present an implementation of the PT algorithm
proposed by (Shirley and Tuchman, 1990) in a spe-
cific context, where projection and sorting computa-
tions costs are virtually eliminated. More than 60% of
the time is dedicated only to the rendering pipeline.
The remainder of this paper is organized as fol-
lows: we discuss previouswork in Section 2, followed
by a quick overview of the PT algorithm in Section 3.
We then describe our approach in Section 4. In Sec-
tion 5 we present two tools for interactive manipu-
lation of the volume data. Results are given in Sec-
tion 6, and some conclusions are drawn in Section 7.
2 PREVIOUS WORK
There are many different approaches for direct
volume rendering in the literature (Kaufman and
Mueller, 2005): cell projection, ray casting and splat-
ting. With the availability of programmable cards,
new algorithms were proposed in order to exploit
Graphics Processing Units (GPUs) for interactive vol-
ume rendering.
Many cell projection algorithms have been pro-
posed for volume rendering on the GPU. Our ap-
312
Maximo A., Marroquim R., Farias R. and Esperança C. (2007).
GPU-BASED CELL PROJECTION FOR LARGE STRUCTURED DATA SETS.
In Proceedings of the Second International Conference on Computer Graphics Theory and Applications - GM/R, pages 312-319
DOI: 10.5220/0002082503120319
Copyright
c
SciTePress
proach is a variation of the GPU-based implemen-
tation of the Projected Tetrahedra technique (Marro-
quim et al., 2006).
The first PT implementation on GPU, called
GATOR, was proposed by (Wylie et al., 2002). The
GATOR algorithm is fast yet redundant, since for
every vertex computation on the GPU all other tetra-
hedron’s vertices must be made available.
One major drawback of the PT-based algorithms is
the need of a visibility sorting of the cells. This prob-
lem has been specifically addressed on many works,
e.g. (Williams, 1992) (Stein et al., 1994) (Comba
et al., 1999), but it is not focused in this paper since
sorting voxels of a regular grid is straightforward.
The Hardware-Based Ray Casting (HARC) algo-
rithm (Weiler et al., 2003a) achieves high quality and
fast volume rendering using the GPU. However, the
memory consumption of the HARC algorithm is high
compared to other cell projection algorithms. A hy-
brid solution between cell projection and ray cast-
ing is the View Independent Cell Projection (VICP)
(Weiler et al., 2003b). By performing ray casting
only inside each projected cell, the VICP achieves
high quality image while consuming less memory
than HARC.
The main idea of the splatting algorithms, intro-
duced by (Westover, 1990), relies on the image area
influenced by each 3D data set voxel. This area,
know as footprint, is a 2D map of 3D reconstruction
kernels of the volume. The extension of Elliptical
Weighted Average (EWA) volume splatting (Zwicker
et al., 2001) proposed by (Chen et al., 2004), accel-
erates the rendering by storing the splat and volume
data on the GPU memory. The main drawbacks of
this method are the aliasing and blurring effects in the
final image.
Level-of-Detail (LOD) techniques may also be
used in conjunction with volume rendering algo-
rithms. The idea is to undersample the 3D data set in
order to reach a specific frame rate. For instance, in
the work of (Callahan et al., 2005), interactive frame
rates are achieved by lowering the quality of the im-
age.
The work of (Roettger et al., 2003) combines ray
casting and the exploit of spatial coherence. Based
on the idea of (Danskin and Hanrahan, 1992), perfor-
mance is improved by early ray termination and space
leaping. Pre-integration techniques are used to obtain
high quality images.
In this paper, we use the partial pre-integration
technique proposed by (Moreland and Angel, 2004)
to obtain high quality images while allowing interac-
tive transfer function editing. Additionally, we adapt
the concept of footprint from splatting. In particu-
lar, we consider one unit of the volume data, i.e. a
hexahedron, as a footprint. This means that the cell
projection is only computed for one hexahedron and
replicated to the rest of the volume. With this, the
computational cost is concentrated on the actual ren-
dering of the triangles.
3 PROJECTED TETRAHEDRA
ALGORITHM
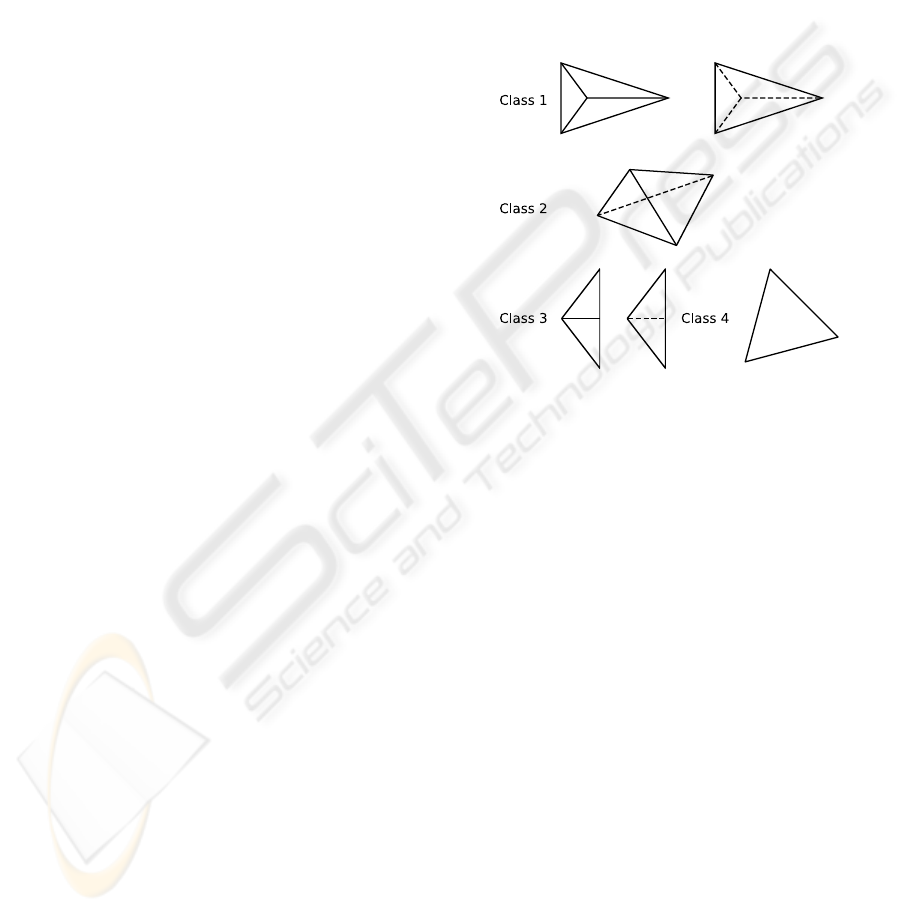
Figure 1: The different classifications of the projected tetra-
hedra.
The projection in our approach is based on the PT al-
gorithm of (Shirley and Tuchman, 1990), where the
tetrahedra are projected to screen space and composed
in visibility order. The tetrahedra’s projected shapes
are classified depending on the different number of
generated triangles (see Figure 1). With this classi-
fication, the colors and opacity values of the trian-
gle vertices are evaluated. An approximation of the
ray integral is then used to compute the color of each
triangle fragment. The final pixel color is computed
by summing all the fragment contributions in back-
to-front order.
For each projection, the thick vertex is defined as
the point of the ray segment that traverses the maxi-
mum distance through the tetrahedron. All other pro-
jected vertices are called thin vertices, as no distance
is covered. For class 2 projections (see Figure 1), the
thick vertex is computed as the intersection between
the front and back edges, while for the other classes
it is one of the projected vertices. The scalar values
of the ray’s entry and exit points are named as s
f
and
s
b
(see Figure 2). Thin vertices have the same values
for s
f
and s
b
, while for thick vertices these values may
have to be interpolated from those of the thin vertices.
The distance traversed by the ray segment is defined
GPU-BASED CELL PROJECTION FOR LARGE STRUCTURED DATA SETS
313

as the thickness l of the cell.
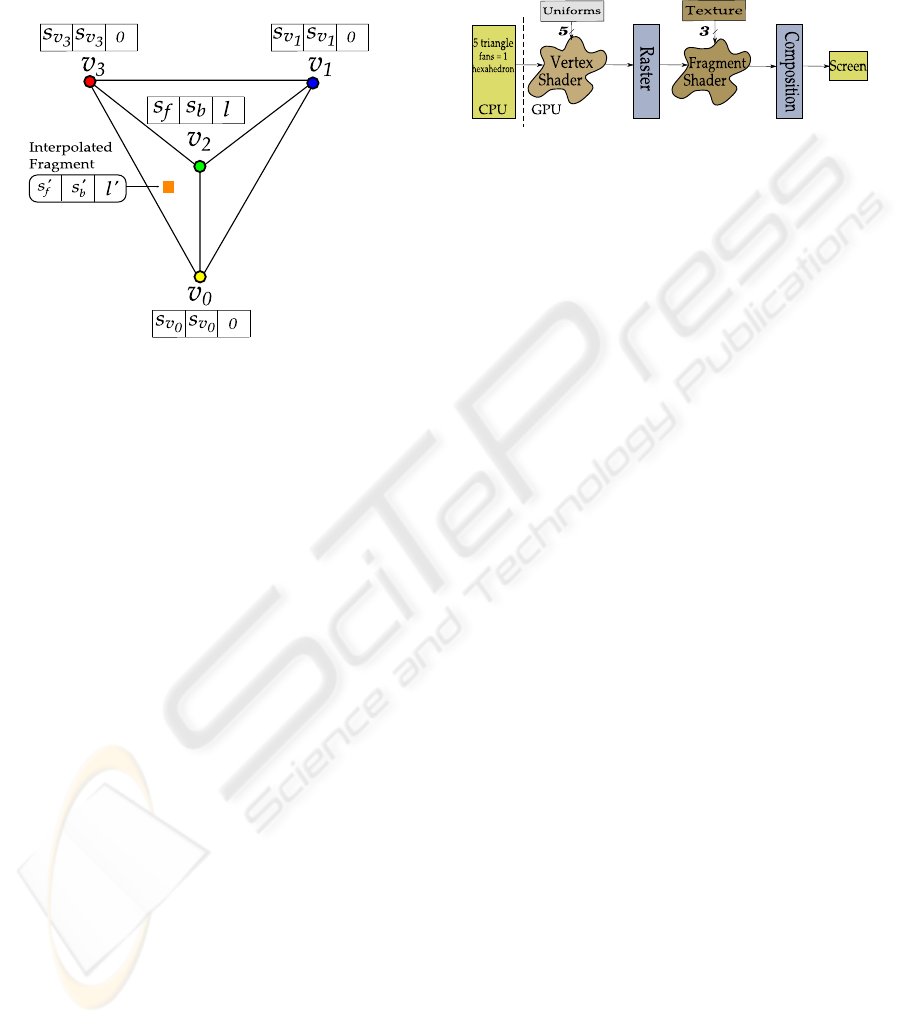
Figure 2: The ray integration parameters inside one tetrahe-
dron.
Three values – s
f
, s
b
and l – are interpolated in-
side each triangle of the projected tetrahedron. To
compute the fragment color, the original PT algorithm
computes the average between s
f
and s
b
. The RGB
color and τ are then retrieved from the transfer func-
tion by this average scalar. On the other hand, the
opacity (α) value is evaluated as α = 1−e
−τl
, where
τ is the extinction coefficient and l is the interpolated
thickness for that fragment.
Finally, the fragments are composed in back-to-
front order. For each new color added to the frame
buffer, the new final color is computed as C
fb
=
αC
new
+ (1 − α)C
fb
. C
fb
is the color already in the
frame buffer, while C
new
and α are the new color and
opacity values computed for the fragment.
4 ALGORITHM OVERVIEW
The main idea of this work is to use the PT algorithm
taking advantage of the volume data regularity. The
algorithm consists of four steps, where the first three
steps take place in the CPU, whereas the last is per-
formed by the GPU (see Figure 3). First, the pro-
jection of a single hexahedron is determined by split-
ting it into five tetrahedra. Then, a traversal order
for the whole volume is determined in constant time.
The remaining step on the CPU consists of allocating
the volume information in a Vertex Array structure.
Lastly, triangles corresponding to the projected tetra-
hedra are rendered and composited in back-to-front
order using the GPU.
Figure 3: Algorithm overview.
4.1 Basis Hexahedron Projection
Since the PT algorithm requires a tetrahedral mesh as
input, the volumedata must be preprocessedby subdi-
viding each hexahedron into five tetrahedra. We term
each such set of tetrahedra a volume unit or volunit for
short. A key observation is that, by rendering the vol-
ume in orthographic projection, all volunits are pro-
jected to the screen in exactly the same way. Thus, to
avoid redundant computation, the projection parame-
ters are computed only once for a basis hexahedron.
Each basis tetrahedron is projected to screen co-
ordinates and its projection class is determined by
means of four cross-product tests, refer to (Marro-
quim et al., 2006) for more details. Then, the thick
vertex and the front and back scalar values can be
computed with at the most two segment intersections
(depending on the class).
For each of the five basis tetrahedra the following
projection values are computed and stored:
• basis projection class,
• basis projected vertices coordinates,
• basis thick vertex coordinates,
• basis intersection parameters for computing the
front and back scalar values,
• basis rendering order.
4.2 Rendering
To render the volume data, each tetrahedron is ren-
dered as a triangle fan. The primitives are drawn in
back-to-front order and the resulting pixel fragments
are composed using a blend function. The basis hexa-
hedron is iteratively displaced to the position of each
volunit, and the stored basis projected vertices are
used to compose the tetrahedra triangles. Each tri-
angle fan is rendered with the number of triangles rel-
ative to its basis projection class following the basis
rendering order. The first vertex of the fan, its central
node, is the basis thick vertex.
Even though the geometry can be resolved by just
displacing the basis hexahedron, the colors and opac-
ity values are unique for each vertex and must be com-
puted on the fly for each volunit. In fact, the final
color is computed only in the GPU’s fragment shader.
The values passed as the vertex color to the render-
ing pipeline are its front and back scalar values and
its thickness.
For every vertex other than the thick vertex, the
scalar front and back values are the same (the orig-
inal scalar of the volume data). Furthermore, their
thickness value is always zero since the ray traverses
no length of the tetrahedron at these vertices. On
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
314
the other hand, the scalar values for the thick ver-
tex are calculated using the basis intersection para-
meters, while the basis thickness was already com-
puted for each basis tetrahedron. Figure 4 illustrates
a rendered triangle with color values.
Figure 4: The color values for a class 1 projection case.
4.2.1 Vertex and Fragment Shaders
Vertex coordinates are computed on the fly by the ver-
tex shader based on the 3 integer indices of the ver-
tex in the lattice. This computation requires several
parameters previously determined for the basis hexa-
hedron and passed to the shader as global values, or
“uniforms” in GLSL parlance.
Each grid vertex is rendered multiple times, once
for each incident tetrahedron. Thus, along with
the vertex grid coordinates, additional information is
coded in the vertex normal, namely the tet
id
and the
vert
id
. The tet
id
is stored in the x normal coordinate
and identifies which of the fivetetrahedra is being ren-
dered. The vert
id
is stored in the y normal coordinate
and identifies the vertex of the tetrahedron. It should
be noted that this coding scheme shifts most of the
computational load from the CPU to the GPU.
The fragment shader receives trilinearly interpo-
lated vertex colors (sf, sb, l) for each triangle frag-
ment. The interpolated scalar values are used to
lookup the chromaticity and opacity values in a trans-
fer function table. This table is stored in a 1D texture
with 256 positions. For each scalar value the trans-
fer function texture is accessed to determine its corre-
spondent RGBA color.
The Figure 5 summarizes the algorithm pipeline
in the GPU. Each volume hexahedron is sent to the
GPU as five triangle fans, while each fan corresponds
to one tetrahedron projection. The vertex shader uses
the basis hexahedron information, stored globally as
uniform variables, to correctly displace each vertex.
The rasterization process interpolates the color infor-
mation inside each triangle (see Figure 4), and the fi-
nal fragment color is computed.
Figure 5: Algorithm pipeline. The 5 projected basis ver-
tices, including the thick vertex, are read in the vertex
shader. While the fragment shader reads 3 textures: ex-
ponential, transfer function, and partial pre-integration.
4.2.2 Fragment Color Computation
Given the front and back colors and thickness values,
there are some options for determining the final frag-
ment color. The simplest and fastest way is to com-
pute the chromaticity value as the average between
the front and back colors. The opacity is computed as
α = 1− e
−τl
, where τ is the mean alpha value, and l
is the thickness. Instead of computing the exponen-
tial value on the fly, a faster way is to use another 1D
texture, namely exponential texture, as a lookup table
for e
−u
, with u sampled over interval [0,1].
Another way to compute the final color is by actu-
ally integrating the colors along the ray traversing the
tetrahedron. However, in practical terms, this is in-
feasible. The pre-integration method (Roettger et al.,
2000) is a way to achieve this result by storing the in-
tegral values for different {s
f
,s
b
,l} in a table. A sin-
gle lookup operation returns the final fragment color.
Nevertheless, this table is computed using the trans-
fer function implicitly, and must be recomputed every
time it changes. Since generating the pre-integration
table is an expensive operation, this cannot be done in
interactive times.
To overcome this disadvantage, the partial pre-
integration approach introduced by (Moreland and
Angel, 2004) computes a table independent of the
transfer function. The so-called ψ table does not de-
pend on any attribute of the visualization, therefore it
is pre-compiled within our implementation.
In the fragment shader, the colors associated with
s
f
and s
b
are retrieved from the transfer function tex-
ture. The C
f
and C
b
together with the thickness value
l are used to compute the indices of the ψ table, stored
in a 2D texture. The value retrieved from this table is
then used to compute the final fragment color.
In contrast with the original PT method, the partial
method is slower than computing the final color using
GPU-BASED CELL PROJECTION FOR LARGE STRUCTURED DATA SETS
315
the scalar front and back average. Moreover, the use
of partial pre-integration, instead of pre-integration,
allows interactive transfer function editing. Every
time the function is updated, the texture is reloaded
into the GPU memory.
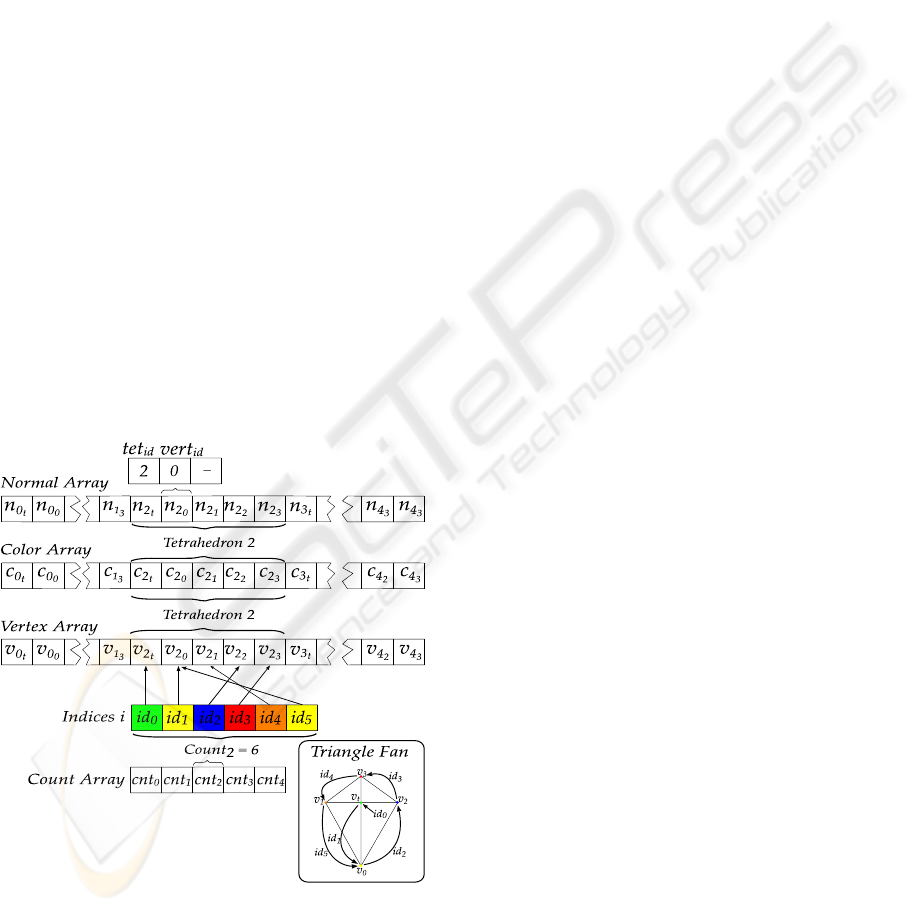
4.2.3 Optimizing with Vertex Arrays
To achieve even higher frame rates, we make use
of the optimized OpenGL function glMultiDrawEle-
ments. The CPU–GPU transfer load is reduced by
keeping some common data among volunits stored in
the GPU memory. For each volunit three arrays are
read by this function: a vertex, a color, and a normal
array. Each array has fixed size and contains five ver-
tices for each of the five tetrahedra (4 vertices plus the
thick vertex).
All coordinates, colors and normals are passed ex-
actly the same way as explained in the last section.
However, the vertex and color arrays must be recom-
puted for each volunit while the normal array can be
computed only once since it is valid for all volume
units.
The order of the vertices of the triangle fans must
be passed as an array argument to the function. Again,
five arrays of indices are created once for all volunits
with the basis rendering order.
Figure 6: The vertex, color, and normal arrays structure.
Figure 6 illustrates an example of the arrays struc-
ture. In this case the third tetrahedron is of class 2 (six
vertices).
4.3 Sorting
One disadvantage of the PT algorithm is that the
primitives must be rendered in an ordered way, typ-
ically back-to-front. Sorting millions of tetrahedra
can be achieved in at most O(n) using auxiliary
data structures and by performing more costly pre-
processing operations (Williams, 1992) (Stein et al.,
1994) (Comba et al., 1999). However, we can again
profit from the fact that the data is regularly spaced
and thus implicitly sorted as a 3D array. All that
remains is determining a traversal rule for this data,
which can be done in constant and negligible time. In
fact, only 8 possible traversal orders are sufficient to
render the volume from any possible angle.
Let ~v = {v
x
,v
y
,v
z
} be the viewing vector, i.e, a
vector pointing to the observer. Then, a positive v
x
in-
dicates that the volunits must be traversed in ascend-
ing order of x indices, whereas a negative v
x
would
indicate a descending order. A similar rationale may
be used for the other axes. Note that the relative or-
der in which the axes are traversed does not matter
for regular data, that is, iterating in the order x, y and
z will produce the same result as iterating in z, y and
x or any other permutation.
5 VOLUME INTERACTION
The interaction with the volume data is improvedwith
two manipulation features: interactive transfer func-
tion editing and volume clipping.
The first allows the user to interactively manipu-
late control points of the transfer function. Every time
a change occurs, the transfer function texture is re-
computed and uploaded again to the fragment shader.
The brightness of the image can also be adjusted and
acts as a global opacity factor.
The clipping tool acts directly on the volume im-
age. By selecting rectangular areas, the volume can
be trimmed and smaller features enlarged. The only
limitation is that the clipping must be parallel to one
of the volume’s bounding box sides to ensure that the
regular properties are maintained.
6 RESULTS
In the previous sections, we have described an imple-
mentation of the PT algorithm for regular data using
vertex and fragment shaders. Our prototype was pro-
grammed in C++ using OpenGL 2.0 with GLSL under
Linux. Performance measurements were made on a
Intel Pentium IV 3.6 GHz, 2 GB RAM, with a nVidia
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
316
GeForce 6800 256 MB graphics card and a PCI Ex-
press 16x bus interface.
Some results for different data sets are shown in
Table 1. All timings were taken with a 512
2
viewport
and considering that the model is constantly rotat-
ing. The rotation procedure is important to change be-
tween different projection classes, since parallel ren-
dering generates less triangles.
The number of vertices (# Verts) and tetrahedra (#
Tet) depends on the dimension of the original regular
data set. Performance measures are given in frames
per second (fps) and millions of tetrahedra per second
(M tet/s) for each data set. In fact, this last column
contains two values: the first is the nominal number
of tetrahedra per second, including those which do
not contribute to the final image, while the second is
the effective number, i.e., the tetrahedra actually ren-
dered.
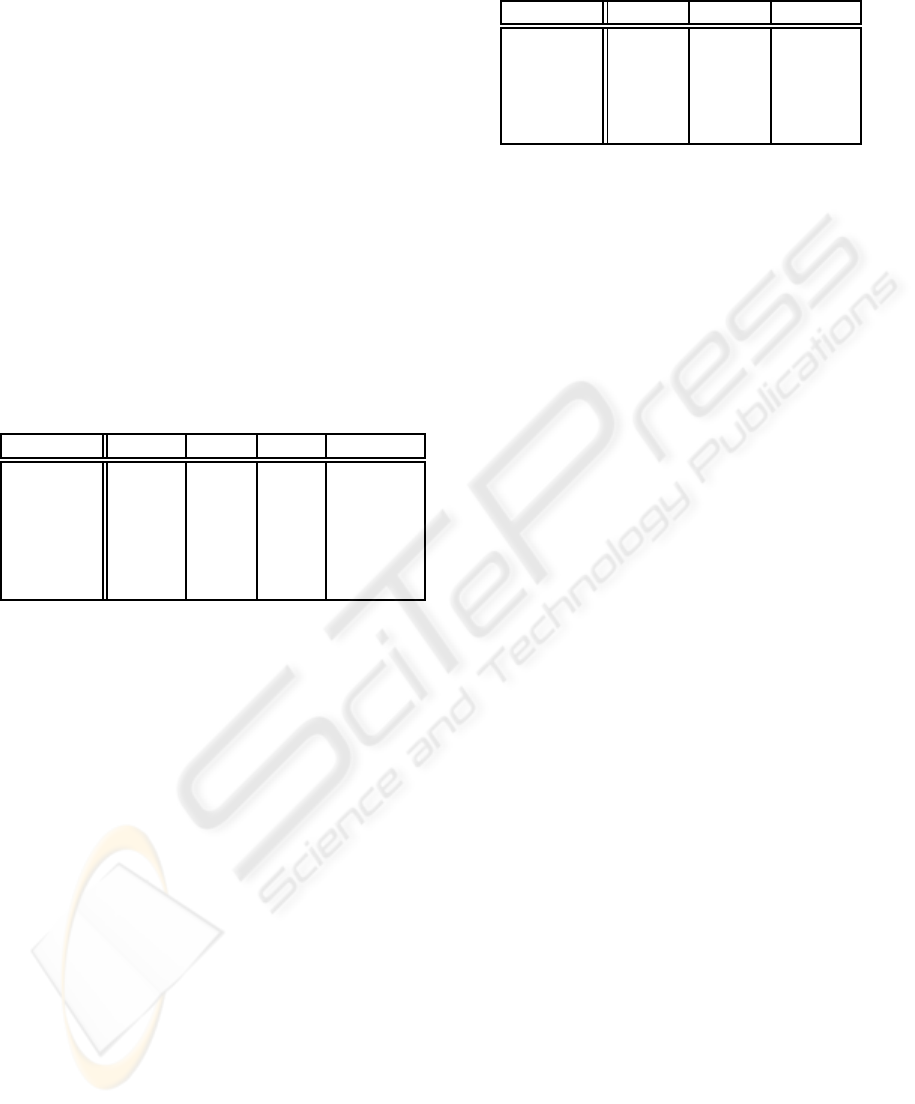
Table 1: Average frames and tetrahedra per second.
Data set # Verts # Tet fps M tet/s
Fuel 262 K 1.2 M 70.78 88.5/5.99
ToothC 1 M 5 M 1.22 13.1/6.30
Tooth 10 M 52 M 0.24 12.7/6.61
Foot 16 M 83 M 0.81 67.7/6.23
Skull 16 M 83 M 0.61 51.7/6.25
Aneurism 16 M 83 M 2.42 201/5.35
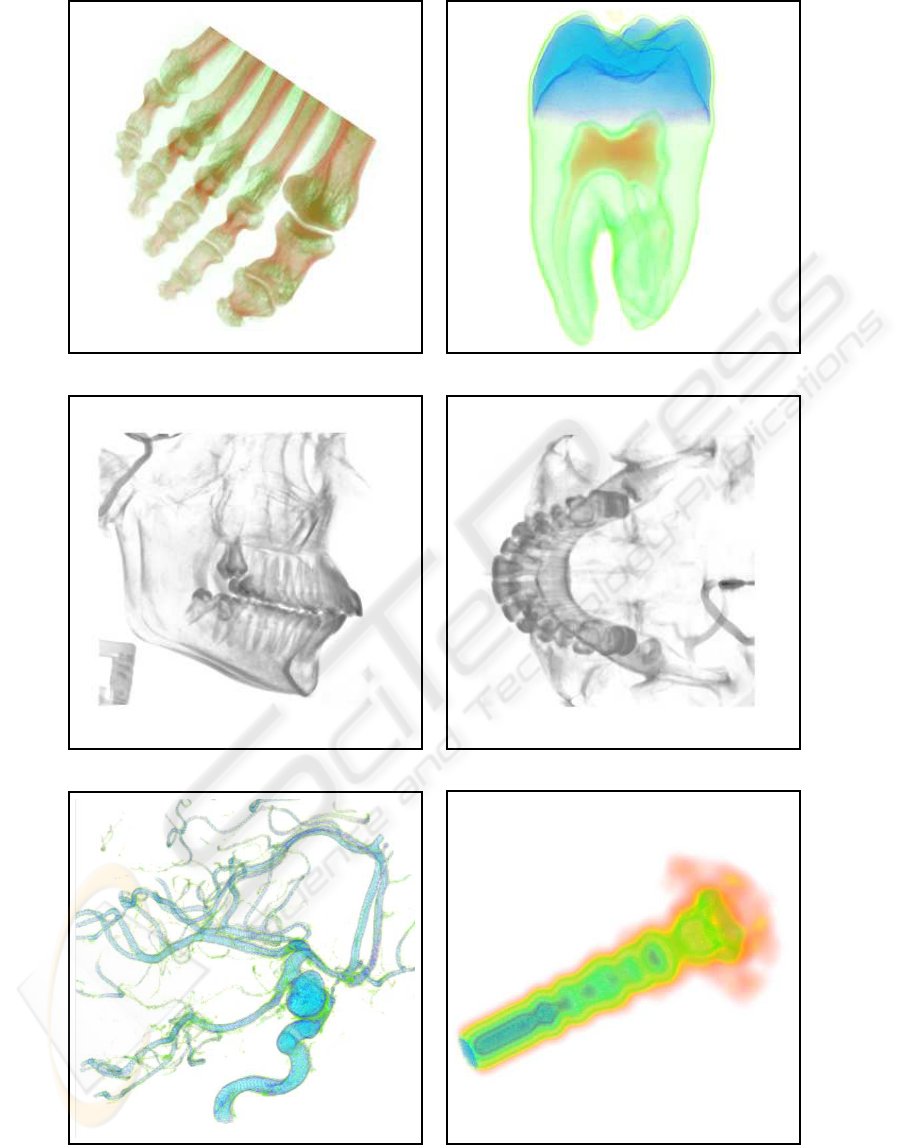
We use five different data sets to measure our al-
gorithm (VolVis, 2006). The simulation of fuel injec-
tion, computed tomography of a tooth, the x-ray scan
of a human foot, skull and aneurism. The row labeled
ToothC corresponds to the original tooth tomography
clipped with our tool.
The value for tetrahedra per second (tet/s) given
in Table 1 only counts the tetrahedra which were ac-
tually rendered, since volunits with zero opacity are
discarded. The models rendered with our algorithm
are shown in Figure 7.
The timing for the vertex array setup and render-
ing are given in Table 2. In our algorithm, the aver-
age time spent in rendering is more than 60% of the
total time. It should be noted that as the time spent
in rendering the volume becomes closer to 100%, the
algorithm times will be bound by the graphics card
performance (Roettger and Ertl, 2003).
7 CONCLUSIONS AND FUTURE
WORK
In this paper we have presented a direct volume ren-
dering algorithm, based on the PT method, that takes
Table 2: Setup and render times.
Data set Setup Render % Total
Fuel 0.005 s 0.009 s 64.28 %
Tooth 1.377 s 6.484 s 82.47 %
Foot 4.556 s 9.074 s 66.57 %
Skull 4.606 s 8.593 s 65.10 %
Aneurism 0.199 s 0.210 s 51.34 %
advantage of the data regularity. The graphics hard-
ware is also explored to increase frame rates up to 6.6
M Tets/s while generating high quality images.
No extra data structures are created other than the
volume data itself. The only limitation is that the
data set must fit in main memory to avoid swapping.
We’ve also created a clipping interface to easily cut
away undesirable parts of the volume, increasing the
frames rates and allowing better visualization and in-
teractivity.
Currently, each hexahedron is divided into five
tetrahedra, each of which is rendered in the worst case
as 4 triangles or a maximum of 20 triangles per volu-
nit. As future work we are investigating ideas to ren-
der less primitives by volume units.
Another improvement being considered consists
of enhancing the visualization by mixing in a Phong
lighting model (Max, 1995) where the gradient field
is used to estimate normal vectors.
REFERENCES
Callahan, S., Comba, J., Shirley, P., and Silva, C. (2005).
Interactive rendering of large unstructured grids using
dynamic level-of-detail. In IEEE Visualization ’05,
ISBN 0-7803-9462-3, pages 199–206.
Chen, W., Ren, L., Zwicker, M., and Pfister, H. (2004).
Hardware-accelerated adaptive ewa volume splatting.
In VIS ’04: Proceedings of the conference on Visu-
alization ’04, pages 67–74, Washington, DC, USA.
IEEE Computer Society.
Comba, J., Klosowski, J. T., Max, N. L., Mitchell, J. S. B.,
Silva, C. T., and Williams, P. L. (1999). Fast polyhe-
dral cell sorting for interactive rendering of unstruc-
tured grids. Computer Graphics Forum, 18(3):369–
376.
Danskin, J. and Hanrahan, P. (1992). Fast algorithms for
volume ray tracing. In VVS ’92: Proceedings of the
1992 workshop on Volume visualization, pages 91–98,
New York, NY, USA. ACM Press.
I. Boada, I. Navazo, R. S. (2001). Multiresolution vol-
ume visualization with a texture-based octree. In The
Visual Computer, pages 185–197. Springer Interna-
tional.
Kaufman, A. and Mueller, K. (2005). Overview of volume
rendering. Chapter for The Visualization Handbook.
GPU-BASED CELL PROJECTION FOR LARGE STRUCTURED DATA SETS
317

Kaufman, A. and Shimony, E. (1986). 3d scan-conversion
algorithms for voxel-based graphics. In SI3D ’86:
Proceedings of the 1986 workshop on Interactive 3D
graphics, pages 45–75, New York, NY, USA. ACM
Press.
LaMar, E., Hamann, B., and Joy, K. I. (1999). Multireso-
lution techniques for interactive texture-based volume
visualization. In VIS ’99: Proceedings of the confer-
ence on Visualization ’99, pages 355–361, Los Alami-
tos, CA, USA. IEEE Computer Society Press.
Marroquim, R., Maximo, A., Farias, R., and Esperanca, C.
(2006). Gpu-based cell projection for interactive vol-
ume rendering. sibgrapi, 0:147–154.
Max, N. (1995). Optical models for direct volume render-
ing. IEEE Transactions on Visualization and Com-
puter Graphics, 1(2):99–108.
Moreland, K. and Angel, E. (2004). A fast high accuracy
volume renderer for unstructured data. In VVS ’04:
Proceedings of the 2004 IEEE Symposium on Volume
visualization and graphics, pages 13–22, Piscataway,
NJ, USA. IEEE Press.
Prakash, C. and Manohar, S. (1995). Volume rendering of
unstructured grid – a voxelization approach. In Com-
puters Graphics, pages 711–726.
Roettger, S. and Ertl, T. (2003). Cell projection of convex
polyhedra. In VG ’03: Proceedings of the 2003 Euro-
graphics/IEEE TVCG Workshop on Volume graphics,
pages 103–107, New York, NY, USA. ACM Press.
Roettger, S., Guthe, S., Weiskopf, D., Ertl, T., and Strasser,
W. (2003). Smart hardware-accelerated volume ren-
dering. In VISSYM ’03: Proceedings of the sym-
posium on Data visualisation 2003, pages 231–238,
Aire-la-Ville, Switzerland, Switzerland. Eurographics
Association.
Roettger, S., Kraus, M., and Ertl, T. (2000). Hardware-
accelerated volume and isosurface rendering based on
cell-projection. In VIS ’00: Proceedings of the confer-
ence on Visualization ’00, pages 109–116, Los Alami-
tos, CA, USA. IEEE Computer Society Press.
Shirley, P. and Tuchman, A. A. (1990). Polygonal approxi-
mation to direct scalar volume rendering. In Proceed-
ings San Diego Workshop on Volume Visualization,
Computer Graphics, volume 24(5), pages 63–70.
Stein, C., Becker, B., and Max, N. (1994). Sorting and hard-
ware assisted rendering for volume visualization. In
Kaufman, A. and Krueger, W., editors, 1994 Sympo-
sium on Volume Visualization, pages 83–90.
VolVis (2006). Volume Visualization.
http://www.volvis.org/.
Weiler, M., Kraus, M., Merz, M., and Ertl, T. (2003a).
Hardware-based ray casting for tetrahedral meshes. In
VIS ’03: Proceedings of the 14th IEEE conference on
Visualization ’03, pages 333–340.
Weiler, M., Kraus, M., Merz, M., and Ertl, T. (2003b).
Hardware-based view-independent cell projection.
IEEE Transactions on Visualization and Computer
Graphics, 9(2):163–175.
Westover, L. (1990). Footprint evaluation for volume ren-
dering. In SIGGRAPH ’90: Proceedings of the 17th
annual conference on Computer graphics and interac-
tive techniques, pages 367–376, New York, NY, USA.
ACM Press.
Williams, P. L. (1992). Visibility-ordering meshed polyhe-
dra. ACM Trans. Graph., 11(2):103–126.
Wylie, B., Moreland, K., Fisk, L. A., and Crossno, P.
(2002). Tetrahedral projection using vertex shaders.
In VVS ’02: Proceedings of the 2002 IEEE Sympo-
sium on Volume visualization and graphics, pages 7–
12, Piscataway, NJ, USA. IEEE Press.
Zwicker, M., Pfister, H., VanBaar, J., and Gross, M. (2001).
Ewa volume splatting. In IEEE Visualization 2001.
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
318
(a) (b)
(c) (d)
(e) (f)
Figure 7: Data sets : Foot (a), Tooth (clipped) (b), Skull (side view) (c), Skull (Bottom view) (d), Aneurism (e), Fuel injection
(f).
GPU-BASED CELL PROJECTION FOR LARGE STRUCTURED DATA SETS
319
