
REAL TIME FALLING LEAVES
Pere-Pau V
´
azquez and Marcos Balsa
MOVING Group, Dep. LSI, Universitat Polit
`
ecnica de Catalunya
Keywords:
Real-Time Rendering, Rendering Hardware, Animation and Simulation of Natural Environments.
Abstract:
There is a growing interest in simulating natural phenomena in computer graphics applications. Animating
natural scenes in real time is one of the most challenging problems due to the inherent complexity of their
structure, formed by millions of geometric entities, and the interactions that happen within. An example of
natural scenario that is needed for games or simulation programs are forests. Forests are difficult to render
because the huge amount of geometric entities and the large amount of detail to be represented. Moreover,
the interactions between the objects (grass, leafs) and external forces such as wind are complex to model. In
this paper we concentrate in the rendering of falling leafs at low cost. We present a technique that exploits
graphics hardware in order to render thousands of leafs with different falling paths at real time and low memory
requirements.
1 INTRODUCTION
Natural phenomena are usually very complex to sim-
ulate due to the high complexity of both the geome-
try and the interactions present in nature. Rendering
realistic forests is a hard problem that is challenged
both by the huge number of present polygons and the
interaction between wind and trees or grass. Certain
falling objects, such as leaves, are difficult to simulate
due to the high complexity of its movement, influ-
enced both by gravity and the hydrodynamic effects
such as drag, lift, vortex shedding, and so on, caused
by the surrounding air. Although very interesting ap-
proaches do simulate the behaviour of light weight
objects such as soap bubbles and feathers have been
developed, to the authors’ knowledge, there is cur-
rently no system that renders multiple falling leaves in
real time. In this paper we present a rendering system
that is able to cope with thousands of falling leaves
at real time each one performing an apparently differ-
ent falling path. In contrast to previous approaches,
our method concentrates on efficient rendering from
precomputed path information and we show how to
effectively reuse path information in order to obtain
per leaf different trajectories at real time and with low
memory requirements. Our contributions are:
• A tool that simulates the falling of leaves from
precomputed information stored in textures.
• A simple method for transforming incoming in-
formation in order to produce different paths for
each leaf.
• A strategy of path reuse that allows for the con-
struction of potentially indefinite long paths from
the initial one.
The rest of the paper is organized as follows: First,
we review related work. In Section 3, we present an
overview of our rendering tool and the path construc-
tion process. Section 4 shows how we perform path
modification and reuse in order to make differently
looking and long trajectories from the same data. Sec-
tion 5 deals with different acceleration strategies we
used. Finally, Section 6 concludes our paper with the
results and future work.
2 RELATED WORK
There is a continuous demand for increasingly re-
alistic visual simulations of complex scenes. Dy-
244
Vázquez P. and Balsa M. (2007).
REAL TIME FALLING LEAVES.
In Proceedings of the Second International Conference on Computer Graphics Theory and Applications - GM/R, pages 244-251
DOI: 10.5220/0002082002440251
Copyright
c
SciTePress

Figure 1: Two scenes with one million polygons and seven thousand (left) and 13.5 thousand leaves falling from the trees.
namic natural scenes are essential for some applica-
tions such as simulators or games. A common exam-
ple are forests due to its inherently huge amount of
polygons needed to represent it, and the highly com-
plex interactions that intervene in animation. There
has been an increasing interest in animating trees or
grass, but there has been little work simulating light
weight falling objects such as leaves or paper. Most
of the papers focus on plants representation and in-
teractive rendering, and only a few papers deal with
the problem of plant animation, and almost no paper
focuses on falling leaves.
2.1 Interactive Rendering
Bradley has proposed an efficient data structure, a
random binary tree, to create, render, and animate
trees in real time (Bradley, 2004). Color of leaves
is progressively modified in order to simulate season
change and are removed when they achieve a certain
amount of color change. Braitmaier et al. pursue
the same objective (Braitmaier et al., 2004) and fo-
cus especially in selecting pigments during the sea-
sons that are coherent with biochemical reactions dur-
ing the seasons. Deussen et al. (Deussen et al., 2002)
use small sets of point and line primitives to repre-
sent complex polygonal plant models and forests at
interactive frame rates. Franzke and Deussen present
a method to efficient rendering plant leaves and other
translucent, highly textured elements by adapting ren-
dering methods for translucent materials in combina-
tion with a set of predefined textures (Franzke and
Deussen, 2003).
Jakulin focuses on fast rendering of trees by using
a mixed representation: polygon meshes for trunks
and big branches, and a set of alpha blended slices
that represent the twigs and leaves. They use the lim-
ited human perception of parallax effects to simplify
the slices needed to render (Jakulin, 2000). Decaudin
and Neyret render dense forests in real time avoiding
the common problems of parallax artifacts (Decaudin
and Neyret, 2004). They assume the forests are dense
enough to be represented by a volumetric texture and
develop an aperiodic tiling strategy that avoids inter-
polation artifacts at tiles borders and generates non-
repetitive forests.
2.2 Plant Motion
There have been some contributions regarding plant
or grass motion, but without focusing on rendering
falling leaves, we present here the ones more related
to our work. Wejchert and Haumann (Wejchert and
Haumann, 1991) developed an aerodynamic model
for simulating the motion objects in fluid flows. In
particular they simulate the falling of leaves from
trees. They use a simplification of Navier-Stokes
equations assuming the fluids are inviscid, irrota-
tional, and uncompressible. However, they do not
deal with the problem of real time rendering of leaves.
Ota et al. (Ota et al., 2004) simulate the motion
of branches and leaves swaying in a wind field by us-
ing noise functions. Again, leaves do not fall but stay
attached to the trees and consequently the movements
are limited. Reeves and Blau (Reeves and Blau, 1985)
proposed an approach based on a particle modeling
system that made the particles evolve in a 2D space
with the effect gusts of wind with random local varia-
tions of intensity. Our system is similar to the latter in
the sense that our precomputed information is used by
applying pseudo random variations, constant for each
leaf, thus resulting in different paths created from the
same initial data.
Wei et al. (Wei et al., 2003) present an approach
that is similar to ours in objectives, because they ren-
der soap bubbles or a feather, but from a simulation
point of view. This limits both the number of ele-
ments that can be simulated and the extension of the
geometry where they can be placed. They model the
wind field by using a Lattice Boltzmann Model, as it
is easy to compute and parallelize.
REAL TIME FALLING LEAVES
245

3 RENDERING LEAVES
In order to design a practical system for real time ren-
dering of falling leaves in real time, three conditions
must be satisfied:
• Paths must be visually pleasing and natural.
• Each leaf must fall in a different way.
• Computational and memory costs per leaf must be
low.
The first objective is tailored to ensure realism. De-
spite the huge complexity of natural scenes, our eyes
are used to them, and therefore, if leaves perform
strange moves in their falling trajectory, we would
note rapidly. This will be achieved by using a physi-
cally based simulator that computes a realistic falling
path of a light-weight object under the influence of
forces such as gravity, vortex, and wind.
The second objective must be fulfilled in the pres-
ence of a set of leaves, in order to obtain plausible
animation: if many leaves are falling, it is important
to avoid visible patterns in their moves, because it
would make the scene look unnatural. In order to re-
duce memory requirements and computation cost, we
will use the same path for all leaves. Despite that, we
make it appear different for each leaf by performing
pseudo random modifications to the path at real time,
and thus, we get a differently looking path per leaf.
The third one is important because it imposes re-
strictions on the rendering tool, if we want a system
to scale well with the number of leaves, the position
computation must have low cost. This can be fulfilled
by storing the trajectory information in a texture that
is used to modify leaf position in a vertex shader. We
have used the so-called Vertex Texture Fetch exten-
sion (Gerasimov et al., 2004), available in modern
NVidia graphics cards (and compatible with the stan-
dard OpenGL Shading Language) in order to compute
the actual position and orientation of each leaf in the
vertex shader. Moreover, the vertex shader takes care
of the path modification too.
Initially, a simple path is calculated and stored in a
texture. We could use more than one path, and reduce
the computations in the vertex shader, although this
results in small gain because the current GPU imple-
mentations (before GF 8800) of vertex texture fetch
are quite slow and the cost of texture accesses domi-
nate over the rest of the work of the vertex. For each
leaf, the vertex shader updates its position and ori-
entation according to the moment t of the animation
using the data of the path. Thus, each leaf does fall
according to the selected path in a naturally looking
fashion. Next, we explain the path construction pro-
cess, the contents of the texture path, and overview
the contents of our vertex shader. Section 4 deals on
reusing data to produce different trajectories for each
leaf.
3.1 Path Construction
There are two possible different methods to construct
the initial path we need for our rendering tool: i) Cap-
turing the real information from nature, or ii) Simu-
lating the behavior of a leaf using a physically-based
algorithm.
Our initial intention was to acquire the 3D data of a
falling leaf and use it for rendering. Unfortunately,
the data of leaves in movement is very difficult to ac-
quire due to many reasons, mainly: their movement is
fast, thus making it difficult for an affordable camera
to correctly (i.e. without blurring artifacts) record the
path, and second, it is not possible to add 3D markers
for acquisition systems because they are too heavy to
attach them to a leaf (a relatively large leaf of approx-
imately 10 × 15 centimeters weighs 4 to 6 grams).
Moreover, in order to capture a sufficiently long path,
we would need a set of cameras covering a volume of
4 or 5 cubic meters, which also implies difficulties in
the set up.
A different approach could be the simulation of
falling leaves using a physically based system. This
poses some difficulties too because Navier-Stokes
equations are difficult to deal with. Some simplifica-
tions such as the systems presented by Wejchert and
Haumann (Wejchert and Haumann, 1991) or Wei et
al. (Wei et al., 2003), have been developed. Fortu-
nately, there are other commercial systems that simu-
late the behavior of objects under the influence of dy-
namic forces such as Maya. Although this approach
is not ideal because it is not easy to model a complex
object as a leaf (the trajectory will be influenced by
its microgeometry and the distribution of mass across
the leaf), and simpler objects will have only similar
behavior, it is probably the most practical solution.
On the other hand, Maya provides a set of dy-
namic forces operators that can be combined in or-
der to define a relatively realistic falling trajectory for
a planar object. In our case, we have built a set of
falling paths by rendering a planar object under the
effect of several forces (gravity, wind, and so on), and
recovered the information on positions and orienta-
tions of the falling object to use them as a trajectory.
Our paths consist of a set of up to 200 positions (with
the corresponding orientation information at each po-
sition). As we will see later, these resulting paths are
further processed before the use in our rendering tool
in order to extract extra information that will help us
to render a per-leaf different path with no limit in its
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
246

length. This extra information is added at the end of
the texture. This way all the information needed for
the rendering process that will be used by the vertex
shader is stored in the same texture (actually we use a
texture for positions and another one for orientations).
Note that, independently of the acquisition
method, if we are able to obtain the aforementioned
information, that is, positions and orientations, we can
plug it into our system.
3.2 Path Information
As we have already explained, we start with the pre-
computed data of a falling leaf and provide it to the
vertex shader in the form of a texture. Concretely, the
trajectory information is stored in a couple of 1D tex-
tures, each containing a set of RGB values that encode
position (x, y, z) and rotation (Rx, Ry, Rz) respectively,
at each moment t. Given an initial position of a leaf
(x
0
, y
0
, z
0
), subsequent positions may be computed as
(x
0
+ x, y
0
+ y, z
0
+ z). Rotations are computed the
same way. In order to make easy the encoding, the
initial position of the path is (0, 0, 0), and subsequent
positions encode displacements, therefore, the value
of y component will be negative for the rest of the po-
sitions. On their hand, orientations encode the real
orientation of the falling object. The relevant infor-
mation our vertex shader receives from the CPU is:
Number of frames of the path: Used to determine
if the provided path has been consumed and we
must jump to another reused position (see Sec-
tion 4.2).
Current time: Moment of the animation.
Total time: Total duration of the path.
Object center: Initial position of the leaf.
Path information: Two 1D textures which contain
positions and orientations respectively.
The vertex shader also receives other information
such as the vertex position, its normal, and so on.
Each frame, the vertex shader gets the correspond-
ing path displacements by accessing the correspond-
ing position (t, as the initial moment is 0) of the tex-
ture path. This simple encoding, and the fact that the
same texture is shared among all the leaves at vertex
shader level, allows us to render thousands of leaves
in real time, because we minimize texture information
change between the CPU and the GPU. Having a dif-
ferent texture per leaf would yield to texture changes
at some point. In Section 4.2 we show how to use the
same path in order to create different trajectories, and
how to reuse the same path when the initial y position
of the leaf is higher than the represented position in
the path.
3.3 Overview
At rendering time, for each leaf, a vertex shader com-
putes the new position and orientation using the cur-
rent time t. It performs the following steps:
1. Looks for the initial frame f
i
(different per leaf)
2. Seek current position in path ( f
i
+t)
3. Calculate actual position and orientation
In step 2, if we have a falling path larger than the
one stored in our texture, when we arrive at the end,
we jump to a different position of the path that pre-
serves continuity, as explained in Section 4.2. Once
we know the correct position and orientation, step 3
performs the corresponding geometric transforms and
ensures the initial and final parts of the path are soft,
as explained in the following subsection.
3.4 Starting and Ending Points
As we have mentioned, the information provided by
our texture path consists in a fixed set of positions and
orientations for a set of defined time moments. Ide-
ally, a different path should be constructed for each
leaf according to its initial position, orientation, and
its real geometry. This way, everything could be pre-
computed, that is, the vertex shader should only re-
place the initial position of the element by the position
stored in a texture. Unfortunately, for large amounts
of leaves, this becomes impractical due to the huge
demand of texture memory and, moreover, the limita-
tion in number of texture units would turn rendering
cost into bandwidth limited because there would be a
continuous necessity of texture change between CPU
and GPU. Thus, we will use the same path for all the
leaves (although we could code some paths in a larger
texture and perform a similar treatment).
In our application, a path is a set of fixed posi-
tions and orientations. Being this path common to all
leaves, and being the initial positions of leaves even-
tually different, it is compulsory to analyze the initial
positions of leaves in order to make coherent the ini-
tial orientations of leaves in our model, that depend on
the model of the tree, and the fixed initial orientation
of our falling path. Note that the position is unimpor-
tant because we encode the initial position of the path
as (0, 0, 0) displacement. As in most cases the orien-
tations will not match, we have to find a simple and
efficient way to make the orientation change softly.
Therefore, a first adaptation movement is required.
Our vertex shader receives, among other parame-
ters, a parameter that indicates the moment t of the
animation. Initially, when t is zero, we must take
the first position of the texture as the information for
REAL TIME FALLING LEAVES
247

Figure 2: Several superposed images of a marked leaf start-
ing to fall (left) and adapting to a planar position on the
ground (right).
leaf rendering. In order to make a soft adjustment be-
tween the initial position of the leaf and the one of
the path, at the initial frames (that is, we have a y dis-
placement smaller than a certain threshold) the vertex
shader makes an interpolation between the initial po-
sition of the leaf and the first position of the path (by
rotating over the center of the leaf). As the leaf moves
only slightly in Y direction for each frame, the effect
is soft (see Figure 2 left).
The same case happens when the leaf arrives to
the ground. If the ground was covered by grass, noth-
ing would be noted, but for a planar ground, if leaves
remain as in the last step of the path, some of them
could not lie on the floor. Note that it is not guaranteed
that each leaf will consume all the path because they
start from different heights. To solve it, when the leaf
is close to the ground, we perform the same strategy
than for the initial moments of the falling path, that is,
we interpolate the last position of the leaf before ar-
riving to the ground with a resting position that aligns
the normal with the normal of the ground. We can see
the different positions a leaf takes when falling to the
ground in Figure 2 (right).
4 PATH MODIFICATION
Up to now we have only presented the construction
and rendering of a single path. However, if we want
our forest to look realistic, each leaf should fall in a
different manner. A simple path of 200 positions re-
quires 1.2 Kb for the positions and orientations. If
we want to render up to ten thousand leaves, each one
with a different path, the storage requirements grow
up to 12 Mb. For larger paths (such as for taller trees),
the size of textures would grow. Therefore, what we
do is to use a single path that will be dynamically
modified for each leaf to simulate plausible variations
per leaf. This is implemented by adding two improve-
ments to our rendering tool: path variation and path
reuse.
4.1 Different Falling Trajectories
As our objective is to reduce texture memory con-
sumption and rendering cost, we will use the same
texture path for each leaf. This makes the memory
cost independent on the number of leaves that fall.
However, if we do not apply any transformation, al-
though not all leaves start falling at the same time, it
will be easy to see patterns when lots of leaves are on
their way down. Updating the texture for each falling
leaf is not an option because it would penalize effi-
ciency. Consequently, the per leaf changes that we
apply must be done at vertex shader level.
In order to use the same base path to create differ-
ent trajectories, we have applied several modifications
at different levels:
• Pseudo-random rotation of the resulting path
around Y axis.
• Pseudo-random scale of X and Y displacements.
• Modification of the starting point.
When we want to modify the falling path we have
to take into account that many leaves falling at the
same time will be seen from the same viewpoint.
Therefore, symmetries in paths will be difficult to
notice if they do not happen parallel to the viewing
plane. We take advantage of this fact and modify the
resulting data by rotating the resulting position around
the Y axis.
In order to perform a deterministic change
to the path, we use a pseudo-random modifi-
cation that depends on the initial position of
the leaf, which is constant and different for
each one. Thus, we rotate the resulting po-
sition a pseudo-random angle Y that is com-
puted as follows: permAngle = mod(center ob j.x ∗
center ob j.y ∗ center ob j.z ∗ 17., 360.). The product
has been chosen empirically.
Although the results at this point may be accept-
able, if the path has some salient feature, that is, some
sudden acceleration or rotation, or any other particu-
larity, this may produce a visually recognizable pat-
tern. Thus, we add a couple of modifications more:
displacement scale and initial point variation.
Although it is not possible to produce an arbitrar-
ily large displacement scale, because it would pro-
duce unnatural moves, a small, again pseudo-random
modification is feasible. The values of X and Z
are then modified by a scaling factor computed as:
scale x = mod(center ob j.z ∗ center ob j.y ∗ 3.0, 3.)
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
248

Figure 3: Different variations of the initial path.
Figure 4: Multiple paths rendered at the same time. Note
the different appearance of all of them.
and scale z = mod(center ob j.x ∗ center ob j.y ∗
3.0, 3.) respectively. This results in a non uniform dis-
tribution of the leaves at a fixed distance of the center
of the tree caused by the falling path (whose displace-
ments did not vary in module up to this change). All
these modifications result in many differently looking
visually pleasing paths. Figure 3 shows several dif-
ferent paths computed by our algorithm and Figure 4
shows the results in a scene.
4.2 Path Reuse
Our texture path information does not depend on the
actual geometry of the scene, in the sense that we
build paths of a fixed length (height), and the result-
ing trajectories might be larger if the starting points
of leaves are high enough. However, we solve this
potential problem by reusing the falling path in a way
inspired by the Video Textures (Sch
¨
odl et al., 2000).
Concretely, once the texture path is consumed, we
jump to a different position of the same texture by
preserving continuity. Thus, we precompute a set of
continuity points in the path that preserve displace-
ment continuity: the positions or orientations must
not match, but the increments in translations must be
similar in order to preserve continuous animation.
The computation of new positions once we have
consumed the original path is quite simple. They are
computed using the last position of the animation and
the displacement increment between the entry point
and its previous point in the texture: path[lastPos] +
path[contPointPos] + path[contPointPos − 1]. This
information is also encoded in the same texture, just
after the information of the path. The texture will
contain then the points of the path and the continu-
Figure 5: Leafs rendered at different moments in a falling
path. Each color indicates a different path usage, pink
leaves are on the floor.
ity information (that simply consists in a value that
indicates the following point). Then, when a falling
leaf reaches the end of the path and has not arrived
to ground, the vertex shader computes the next cor-
rect position in the path according to the information
provided by the texture. If required, changes to the in-
terpretation of the following positions (different dis-
placements) could be added and encoded as the conti-
nuity information in the same style than the ones per-
formed to modify paths and therefore we could have
a potentially indefinite path with multiple variations.
Different stages of these paths are shown in Figure 5
as different colors (pink leaves lie on the floor).
Apart from this information, we add another mod-
ification to the vertex shader. In the same spirit than
the continuity points, we compute a set of starting
points among which the initial position (frame0) is
pseudo randomly chosen (OpenGL specification of
the shading language provides a noise function but it
is not currently implemented in most graphics cards)
using the following formula: mod((centre
o
b j.y ∗
centre
o
b j.x ∗ 37.), f loat(MAX F − 1) where MAX F
is the maximum number of frames of the animation.
These continuity points are chosen among the ones
with slow velocity and orientation roughly parallel to
the ground, in order to ensure the soft starting of the
movement of the leaf. Therefore, each path starts in
one of the set of precomputed points, making thus the
final trajectories of the leaves quite different.
5 OPTIMIZATIONS
Our implementation includes optimizations such as
display lists for static geometry, frustum culling, and
REAL TIME FALLING LEAVES
249
occlusion culling. However there is a bottleneck that
raises when many leaves are continuously thrown dur-
ing a walkthrough. If we implement the algorithm
as is, while rendering a long walkthrough the fram-
erate decays due to the cost incurred in the vertex
shaders. As all thrown leaves are processed by the
vertex shader even if they already are on the floor.
The vertex processing cost increases because the ac-
cesses to texture are determined by the current frame.
When the computed position is under the floor, then
the vertex program looks for the first position that re-
sults in the leaf lying on the floor. This requires a
binary search with several texture accesses and tex-
ture access at vertex shader level is not optimized as
in fragment shaders.
We have implemented a simple solution that con-
sists in removing the leaves that are on the ground
from the list of leaves that are treated by the vertex
shader. At each frame, the CPU selects a subset of
leaves that started to fall long enough to have arrived
to the ground (in our case, two seconds since they
started falling is usually enough). The correct position
on the ground is computed on the CPU and updated,
and the leaf is removed from the list of falling leaves.
This step is not costly, as our experiments show that
for one thousand falling leaves, 5 to 13 leaves need
to be erased at each frame. This allows us to keep
the frame rate constant for long exploration paths and
thousands of falling leaves.
We have further taken advantage of graphics hard-
ware in a different way: we use occlusion queries to
lazily remove leaves from the pipeline for a small set
of frames, for instance 4 frames which causes no no-
ticeable artifacts. We proceed the following way: At
each frame, the potentially visible leaves are thrown
and use an occlusion query per leaf to determine if
they were finally visible. In case they were not, these
are removed from the visible list for 4 frames, and
then rendered again with the occlusion query. As we
are going to skip up to 4 frames, we only check for a
subset of the leaves each of the frames, which allows
us to balance the cost of occlusion queries throughout
the frames. This improvement has noticeable results
especially when the occlusions are important, as when
the walthrough goes among the trees, or the trees are
densely populated. Note that we cannot use view frus-
trum culling for leaves as their initial position is not
the same than the one they will be rendered to.
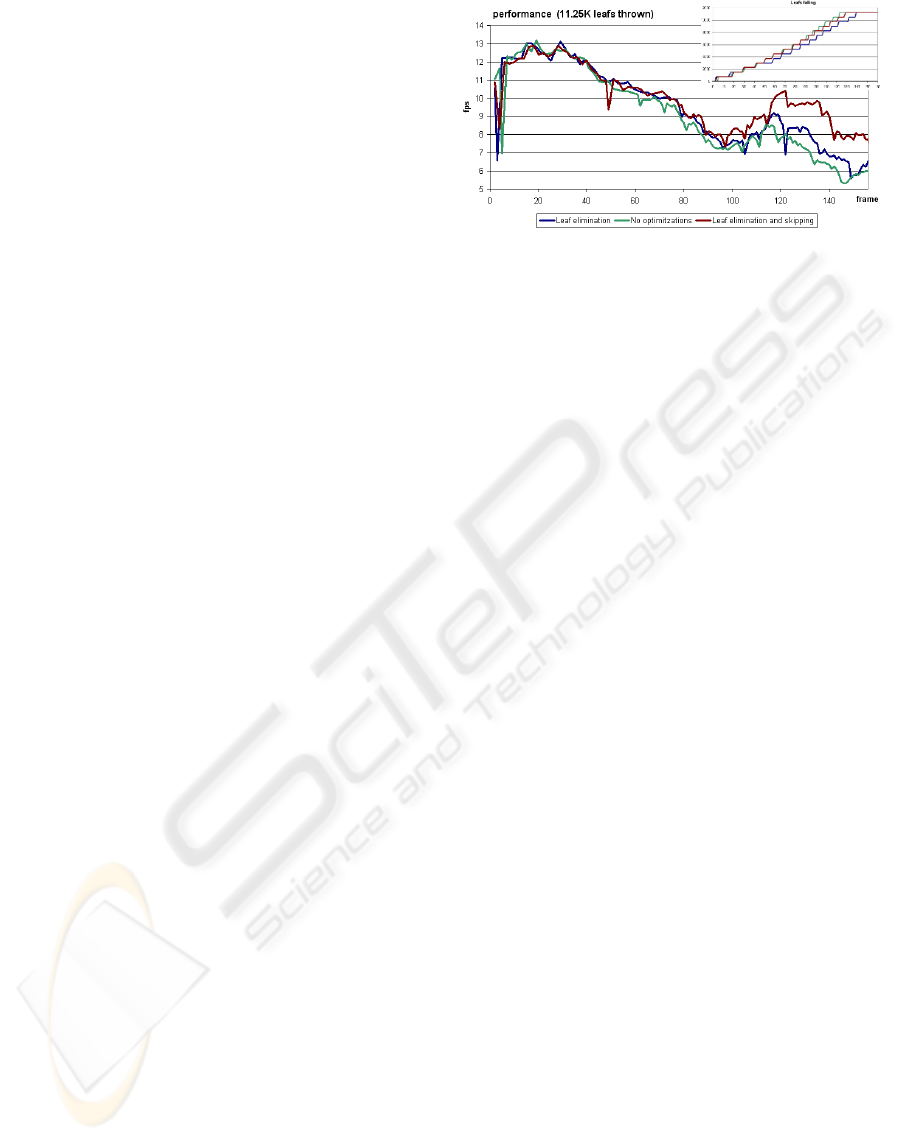
The impact of those modifications can be seen in
Figure 6 where the framerates of a complex naviga-
tion path is shown. We compare the initial method
without optimizations (green) with the first optimiza-
tion (blue), that consists in progressively determine
the leaves which are on the floor and compute their
Figure 6: Results with a complex path in a scene of 1M
polygons. Top right shows the amount of leaves that have
been thrown, up to 11250, throughout the path. Note the
maintenance of framerate for the optimized (brown) version
of our method.
actual position and erase them from the set of leaves
that are rendered using the vertex shader, and the one
that also includes occlusion queries for selectively
skip non visible leaves for up to 4 frames (brown).
The framerate especially decays with the increase of
falling leaves if we do not wipe out from the pipeline
when they already are on the ground. Note how the
optimized version (brown) maintains the framerate
for a large number of falling leaves, and can even dou-
ble the results of the non optimized version.
6 CONCLUSIONS
6.1 Results
We have implemented the presented algorithm in a
3.4GHz PC equipped with a GeForce FX 6800 ultra
graphics card and 1Gb of RAM memory. Our re-
sults show that we can render several thousands of
leaves at real time. We have experienced with differ-
ent configurations, some results are shown in Table 1.
In order to determine the cost of the rendering pro-
cess, we have to compare with the walthrough that
throws no leaves. Note that the framerate impact of
falling leaves is influenced not only by the number
of falling leaves but the number of polygons that the
leaves have. We can see that even for large scenes
(768K polygons) and a high number of leaves thrown,
we maintain the framerate with small (around 20% for
5000 leaves) cost penalization.
6.2 Conclusions and Future Work
Natural scenes are usually complex to model and to
simulate due to the high number of polygons needed
to represent the scenes and the huge complexity of the
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
250

Table 1: Results obtained with our algorithm for different
amounts of falling leaves and trees. Average fps are ob-
tained from different walthroughs of several hundred frames
that surround or cross the set of trees. All examples are ren-
dered at full screen (1280 × 1024) resolution.
Trees/Pols Triangles per leaf Leafs fps
1/128K 6 0 36.97
1/128K 6 1000 34.4
1/128K 6 2000 31.88
1/128K 6 5000 28.09
4/512K 6 0 18.79
4/512K 6 1000 17.49
4/512K 6 2000 16.66
4/512K 6 5000 14.27
6/768K 6 0 10.9
6/768K 6 1500 10.04
6/768K 6 3000 9.56
6/768K 6 6000 8.63
Figure 7: Two different snapshots. Top: 1M polygons, 3
thousand leaves. Down: 1.2 M polygons, 24.7 leaves.
interactions involved. However, the demands of more
realism in scenes do not stop growing. In this pa-
per we have presented a method for rendering leaves
falling in real time. Our system is capable of render-
ing thousands of leaves at rates of up to 20-30 fps.
We have also developed a method for reusing a sin-
gle falling path in such a way that each leaf seems to
fall in a different manner. This results in low texture
memory storage requirements and bandwidth. We
have also presented a method for path reuse in order
to make longer falling trajectories by reusing the same
information data. In future we want to deal with col-
lision detection and wind simulation.
ACKNOWLEDGEMENTS
This work has been supported by TIN2004-08065-
C02-01 of Spanish Government.
REFERENCES
Bradley, D. (2004). Visualizing botanical trees over four
seasons. In IEEE Visualization, page 13.
Braitmaier, M., Diepstraten, J., and Ertl, T. (2004). Real-
Time Rendering of Seasonal Influenced Trees. In
Lever, P., editor, Procceedings of Theory and Practice
of Computer Graphics, pages 152–159. Eurgraphics,
UK.
Decaudin, P. and Neyret, F. (2004). Rendering forest scenes
in real-time. In Jensen, H. W. and Keller, A., edi-
tors, Rendering Techniques, pages 93–102. Springer-
Verlag.
Deussen, O., Colditz, C., Stamminger, M., and Drettakis,
G. (2002). Interactive visualization of complex plant
ecosystems. In VIS ’02: Proceedings of the confer-
ence on Visualization ’02, pages 219–226, Washing-
ton, DC, USA. IEEE Computer Society.
Franzke, O. and Deussen, O. (2003). In Plant Modelling
and Applications, chapter Accurate graphical repre-
sentation of plant leaves. Springer-Verlag.
Gerasimov, P., Fernando, R., and Green, S. (2004).
Shader model 3.0, using vertex textures, whitepaper.
http://developer.nvidia.com.
Jakulin, A. (2000). Interactive vegetation rendering with
slicing and blending. In de Sousa, A. and Torres,
J., editors, Proc. Eurographics 2000 (Short Presenta-
tions). Eurographics.
Ota, S., Tamura, M., Fujimoto, T., Muraoka, K., and Chiba,
N. (2004). A hybrid method for real-time animation
of trees swaying in wind fields. The Visual Computer,
20(10):613–623.
Reeves, W. T. and Blau, R. (1985). Approximate and prob-
abilistic algorithms for shading and rendering struc-
tured particle systems. In Barsky, B. A., editor, Com-
puter Graphics Proceedings (Proc. SIGGRAPH ’85),
volume 19, pages 313–322.
Sch
¨
odl, A., Szeliski, R., Salesin, D. H., and Essa, I.
(2000). Video textures. In Akeley, K., editor, Sig-
graph 2000, Computer Graphics Proceedings, pages
489–498. ACM Press / ACM SIGGRAPH / Addison
Wesley Longman.
Wei, X., Zhao, Y., Fan, Z., Li, W., Yoakum-Stover, S., and
Kaufman, A. (2003). Blowing in the wind. In Proc. of
the 2003 ACM SIGGRAPH/Eurographics Symposium
on Computer Animation, pages 75–85, Switzerland.
Eurographics Association.
Wejchert, J. and Haumann, D. (1991). Animation aerody-
namics. SIGGRAPH Comput. Graph., 25(4):19–22.
REAL TIME FALLING LEAVES
251
