
2D IMAGES CALIBRATION TO FACIAL FEATURES
EXTRACTION
Daniel Trevisan Bravo and Sergio Roberto Matiello Pellegrino
Instituto Tecnológico de Aeronáutica, Praça Mal Eduardo Gomes, 50
São Jose dos Campos, São Paulo, Brazil
Keywords: Facial features extraction, digital image processing and computer graphics.
Abstract: The extraction of facial characteristics is important for several applications that involve the 3D
reconstruction and facial recognition. In general, facial modelling applications based on 2D images for
create 3D model needs, after all, to prepare the extraction images looking for the facial features. In this
paper we show some procedures to calibrate and make corrections between two distinct images acquired in
distinct instants (the frontal and outline). The aim of this study is to work with human faces, so we use well
kwon characteristics like eyes position, mouth, nose curvature, etc. to take previous knowledge about some
features and take it to help us to find automatically secondary characteristics for 3D human face. Although
this approach makes the process faster, it also imposes restrictions to the model that, however, does not
disable its execution in most of cases.
1 INTRODUCTION
The human face has macro characteristics well
defined, which become challenging when observed
in details. Essentially, the face is the main part of the
body and serves as a differential element among the
individuals, being responsible for transmitting
emotions.
There are many approaches that can be used in
the facial features extraction of two or more 2D
images that can be used like an automatic or a
semiautomatic form (with human interference).
The most part of papers that accomplishes this
matter uses two cameras to capture the two images
at the same time. It facilitates the process because
the images can be previously calibrated.
Among
them, highlight the works of (Akimoto, Suenaga,
and Richard, 1993), (Kurihara and Arai, 1991), (Lee,
Kalra and Magnenat-Thalmann, 1997) and (Lee and
Magnenat-Thalmann, 2000).
In this paper, the differential is that we take two
pictures with the same camera in two different
moments. For this, we need to develop a calibration
and correction procedures to join the two images to
reconstruct the 3D model. This will be discussed on
the next sections.
2 2D IMAGES CALIBRATION
PROCESS
In this section the calibration process is detailed,
what covers, from the restrictions that should be
imposed on the acquisition of images, to the final
result.
2.1 Images Acquisition
Some restrictions should be adopted during this
phase: (i) the image must be in Gray scale, (ii)
lightning and environment background
homogeneous, (iii) no obstruction of images, (iv) the
face must be neutral, (v) the lateral image must be
taken, considering that the head must have had a
rotation angle of 90° around axis y, (vi) the head
inclination angle must not be bigger than 15°and
(vii) the images must have a good contrast degree.
However these restrictions were not avoided in
all moments, and the results could be obtained in a
good form, showing the algorithm’s hardness.
124
Trevisan Bravo D. and Roberto Matiello Pellegrino S. (2007).
2D IMAGES CALIBRATION TO FACIAL FEATURES EXTRACTION.
In Proceedings of the Second International Conference on Computer Graphics Theory and Applications - GM/R, pages 124-129
DOI: 10.5220/0002074901240129
Copyright
c
SciTePress
2.2 Images Normalization
As the images are captured in different moments,
they are not calibrated. The first step in the
normalization way of the two images is to find the
top of the head and the chin, making this one is in
the same vertical position on both images. The next
phases are the alignment of the others features like
mouth, nose and eyes.
To normalize the images we need to align the
constellations of the frontal images with the lateral
one.
To help the speed of the process, we used a facial
algorithm characteristic location, developed by
Coelho (Coelho, 1999). It helps with the reduction
of the searching area, finding the rectangular region
that recovers the head in the front view. The same
algorithm was used for the lateral view, but it had to
be adapted for this case.
We look for the tip of the nose at the first step,
because it is the most salient point in the lateral
view, and it helps us to define the right limit (for
example) of our model. The opposite limit is not
easily found, because this one can be camouflaged
by voluminous hair; the tied hair extends the head
length, and the others. In this case, it is defined as
being the horizontal smaller position found in the
central head height (the mid point from the head
until the chin). The inferior limiting is found by the
profile outline topography analysis (Bravo, 2006).
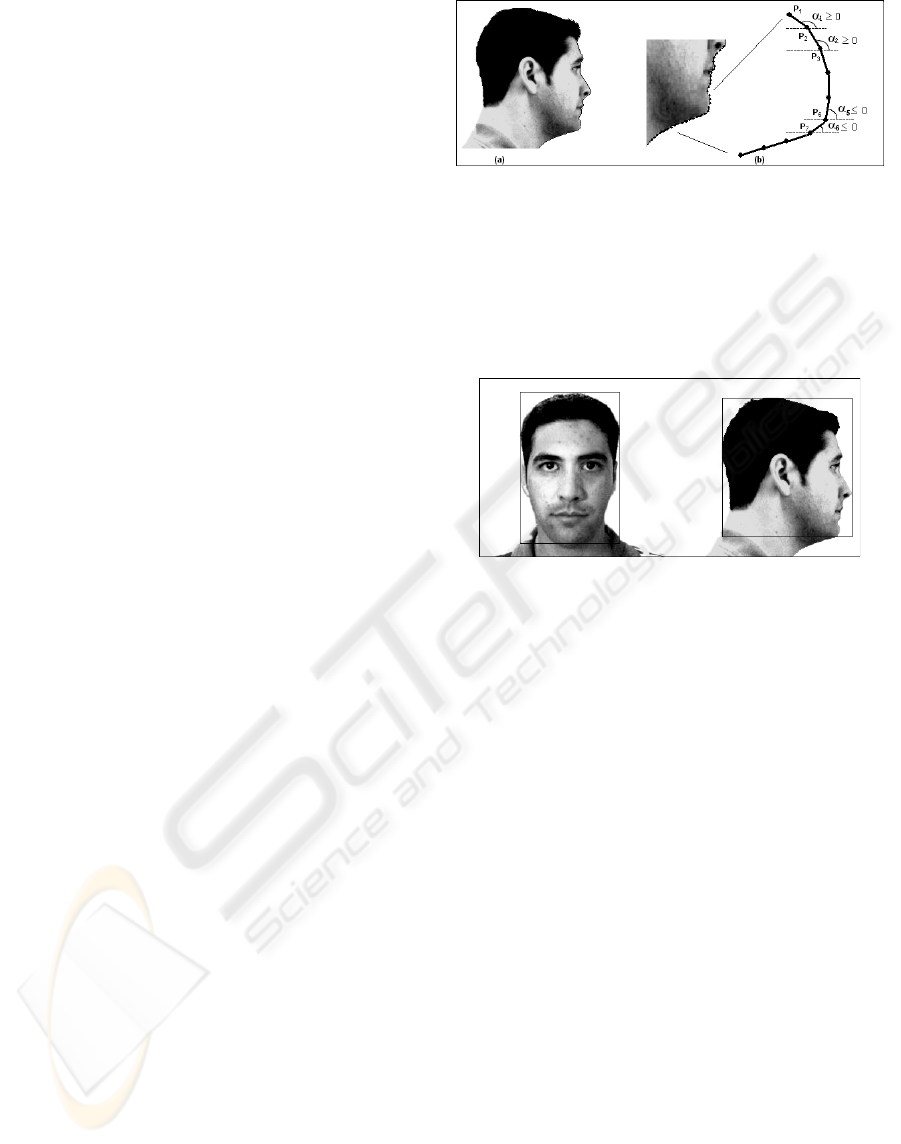
The analysis is made by extracting the outline
lateral profile limit, as shown in the Figure 1 (a). As
the image background is homogeneous, the edge that
represents the side profile is detected through of
horizontal and vertical scan lines running through
the image from the top of the head to the neck
region. The point is considered belonging to the
edge when there is a pixel luminous intensity abrupt
variation, thus, the profile outline is obtained,
besides being used to the determination of the
inferior limiting and in the features extraction phase
.
To determine the inferior limiting, a profile
topographical analysis is accomplished in a region
from the nose height until the neck. In Figure 1 (b) it
is shown the topography analysis in a part of outline,
where α1, ..., αn are the angular coefficients that the
profile does outline straight line with the axis x.
We can see that the most negative coefficient
always coincides with the inferior limit of the face,
so this information leaves us to conclude that this
point corresponds to the smallest Y value of the
image.
Figure 1: (a) Edge that represents the profile outline; (b)
Profile outline topography analysis used in the detection
process of the inferior limiting.
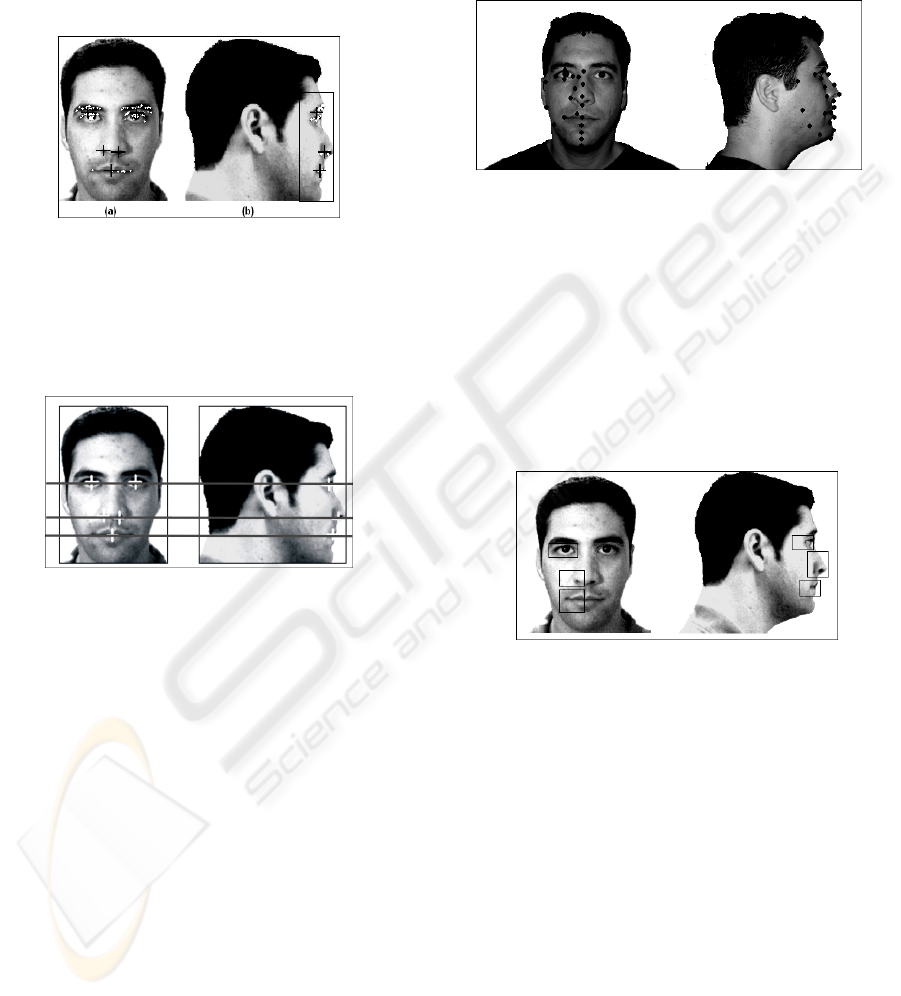
To calibrate the images we insert them in two
boxes with pre defined size, keeping the height and
width proportion between each other. The bounding
boxes are showed in the Figure 2.
Figure 2: Determination of the rectangular regions that
recover the head.
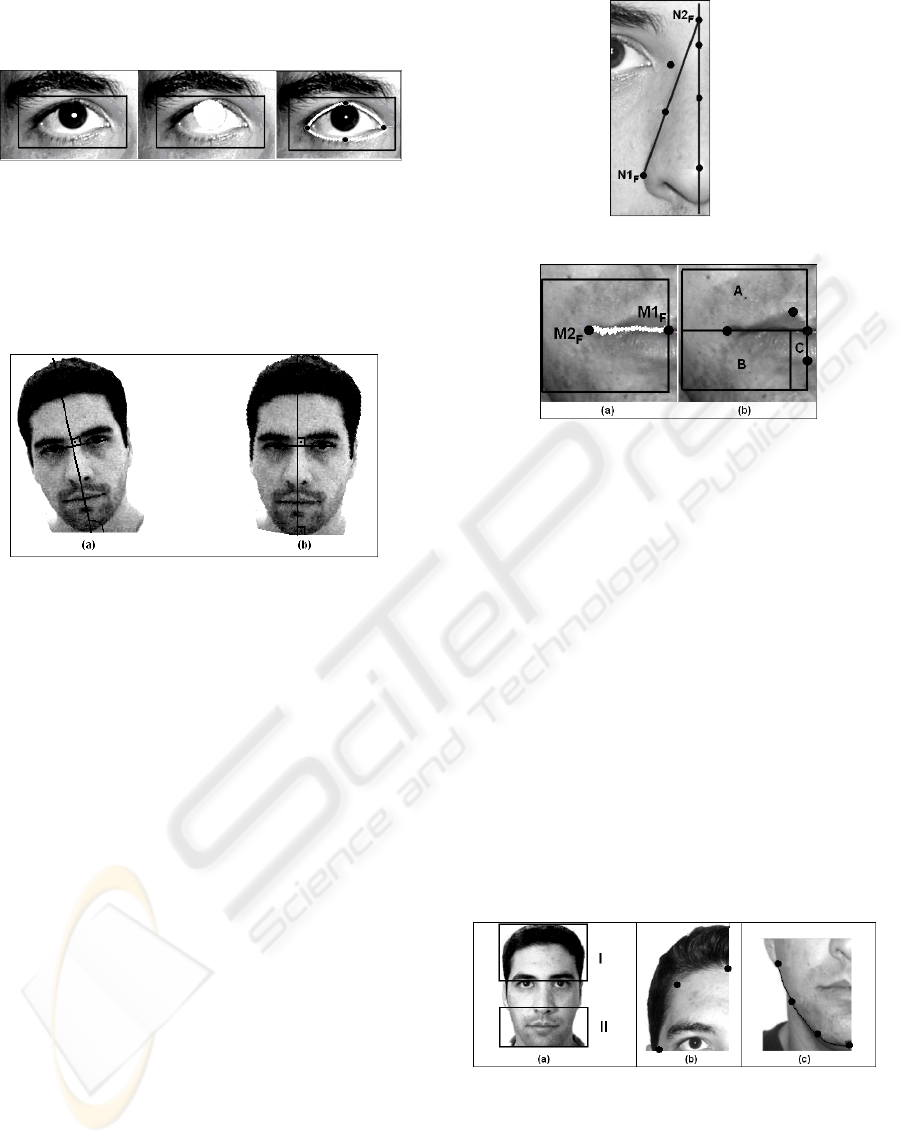
The algorithm looks for the objects of interest
using the techniques of Constellations, which
consists in finding the group of pixels with low
intensity. In this way, five Constellations are found,
the eyes, the nostrils and the mouth in the front
image, and three in the lateral one. In the last case,
we adopt an empirical solution to find the new area
where the Constellations are. First of all, we
delimited the area of search using the following
criterions: The superior limit of the new box is
defined as the mid point between the top of the head
and the tip of the nose; the inferior limit is taken as
the own chin position; The right border is taken
passing on the tip of the nose; finally the left border
are far away from 80% of the left side of the
bounding box.
Each constellation is composed by the minimum
points (marked in white) and by the central point
(marked with a cross), as it shows the Figure 3 (a).
It can have some constellations that do not bring
interesting information. When you know the tip of
the nose location, it can say that, above of this point,
there will only be the constellation of an eye and,
below it, only two constellations, of the nostril and
of the mouth. With these information, the lateral
image constellations are defined (Figure 3 (b)).
2D IMAGES CALIBRATION TO FACIAL FEATURES EXTRACTION
125
After all Constellations discovered in the two
images, the system proceed the verification if they
have the same vertical position, using the
information of the central point of them like target.
If they are not on the same height, we can tolerate
some bypass if the central point of one is inside the
range of the other Constellation.
Figure 3: (a) Constellations and minimum points defined
for the frontal image; (b) Constellations and minimum
points defined for the lateral image.
When all the constellations are aligned, the
normalization process will be completed. In Figure 4
there are shown the normalized images.
Figure 4: Normalization process of the images through the
constellations aligning.
It can happen that, one or more constellations are
not aligned. In this case the problems can come from
the images acquisition phase. There is a possibility
of a no alignment of all constellations due the head
inclination to be different at each acquisition
moment. When it happens, the generic face model is
applied to the images, in a way that, for any
alteration on the front mask, an alteration in side
image is provoked, inserting or removing lines in the
original one.
3 FEATURES EXTRACTION
The features are extracted in both images following
the principle of “divide and conquer”. The
information is obtained performing the image
analyses in each region separately instead of
scanning the whole face. It accelerates the work,
mainly in relation to the processing time to get to a
final result. In Figure 5 the points to be extracted are
showed, and are based in a subset of feature points
determined by the MPEG-4 pattern. More
information about this pattern can be obtained in
(Pandzic and Forchheimer, 2002).
Figure 5: Feature points to be extracted in frontal and side
images.
In Figure 6 one can see the images with the
defined search windows. The dimension of each one
is calculated based on the central point of
constellations, being the length and height defined
by percentage in relation to the face dimensions on
both views.
The search procedures by feature points in those
windows employ some specific techniques of
processing and analyzes of the images.
Figure 6: Defined search windows to features extraction.
3.1 Feature Extraction on the Front
Image
Considering that the human face is almost
symmetric, the features extraction on the front image
is applied only for the left half of the face.
The features extraction of the eye region is based
on the work developed by (Vezhnevets and
Degtiareva, 2004), who uses procedures based on
the luminosity intensity variation of the pixels.
In Figure 7 the extract process of the eyes
extremities, are divided in four steps: 1) to detect the
centre of the iris; 2) estimative of the iris ratio; 3) to
detect the border of the inferior eyelid; 4) the
estimative of the superior eyelid contour. The
determination of the points that belong to the border
of the eyelids, enables the features extraction that
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
126
gives information about the height and width of the
eyes.
Figure 7: Eye features extraction process.
Having the line segment which unites the eyes
extremities and the line segment defined by the
inferior and superior limits, and which passes
through the tip of the nose, the central axis of the
face must have an inclination of 90° in relation to
axis x (Figure 8).
Figure 8: (a) Central axis determination; (b) Head
inclination correction.
In Figure 9 the other features extracted for the
nose region are showed. The coordinate y of those
points are obtained having as reference the face
model of Parke (Parke and Waters, 1996). The
coordinate x of the point N1
F
, represents the nose
edge, and are determined applying a Sobel Operator
(Lindley, 1991), in the same way the coordinates of
N2
F
helps us to find some peculiarity of the nose
form like its root on the front, the curve near the
corner of the eyes, and the silhouette from the
middle up to the base in the down side of it
The application needs extracts the features from
the mouth region. For that we are based on the work
developed by (Lanzarotti et al., 2001). The first step
is detected the cut line between the superior and
inferior lips. When the system knows this region its
enable to extract the points related to the mid point
of the lips and to the corner of the mouth
respectively, M1
F
and M2
F
, as showed in Figure
10(a).
Moreover, it is possible to classify the mouth
region in three parts (Figure 10(b)): Superior lips
(A); Inferior lips (B); Central of the mouth (C). This
way helps the system to identify more easily the own
characteristics, because it will work in specific area.
Figure 9: Features extracted for the nose region.
Figure 10: (a) Determination of the points M1F and M2F
by the border of the lips; (b) Subdivision of the mouth
region to the extraction of the related points to the superior
and inferior lips.
In order, to extract the target points, the face are
divided in two regions as showed in the Figure
11(a). In the same figure, part b, we can see the
target points seek in the region I, correspondent to
the front of the model. Their locations are based in
the Parker model, and it’s taken as help. In the
regions II the points that will be used in chin
silhouette are founded. The extraction process of
them is based on (Goto et al., 2001), where the jaw
curve is determined taking into account that its
shape is approximately half of an ellipse. The Figure
11(c) shows the points which are extracted from the
outline of the jaw and the information of borders on
this region. Such border is obtained by a searching
system in a region limited by two auxiliary ellipses,
one internal and another external to the ideal curve.
Figure 11: (a) Face division for feature extractions; (b)
Extraction of the points related to the front head region;
(c) Extraction process of points on the jaw border.
Some points belonging to the chin region will be
obtained when its corresponding ones are extracted
from the side image.
2D IMAGES CALIBRATION TO FACIAL FEATURES EXTRACTION
127

3.2 Feature Extraction on the Side
Image
The points extracted in this phase concerning the
vertical and horizontal position (depth), respectively
y and z coordinates.
For the eyes it’s only possible to extract three
points: the left corner and the superior and inferior
limits, as showed in the Figure 12.
Figure 12: Features extracted in the eye region.
In the nose region we have some interested
points. The N1s, N2s and N3s points are easily
extract with help of the other found earlier. The
other points showed in the Figure 13 are obtained
creating two sub regions, where the border passes
exactly in the tip of nose.
From sub-region B are extracted the points
referent to the nose edge (N4
S
) and the nose base
(N5
S
). These data are obtained with the help of
extractions done on the front face, being the relation
shown in Figure 13 (b).
Figure 13: (a) Subdivision of the search window for
extraction; (b) Correspondence between the images for the
feature extraction in the region of the nose.
In the sub-region A, the vertical positions that
characterize the curve that narrows the nose (N6
S
and N7
S
) are obtained through the features
correspondent on the front view. The coordinate x of
the point N7
S
is obtained considering the border of
the outline at the height where the feature was
defined.
The process of extraction in the mouth region is
based on the work developed by (Ansari and Abdel-
Mottaleb, 2003). First of all, we sub divide the
region in two parts with purpose to identify the two
more external points of the silhouette. The border of
this two windows passes through the point M3s,
showed in the Figure 14(a), and it was obtained from
the cut of lips
After that, we can easily obtain the points M1s,
in the window A, and M2s, in the window B. The
last interested point (M4s) is the corner of mouth,
and is obtained from the information of the borders
in the region limited by search window, as showed
in the Figure 14(b).
Figure 14: (a) Subdivision of the search window for
extraction; (b) Feature extraction of the mouth border.
Finally the system will detect the contour of the
face in the lateral side. For this case the image was
divided in two parts, showed in the Figure 15. To
obtain the inner contour we use an ellipse to help us
to find the interested points. The outer points in the
chin are extracted normally from the face border
information.
Figure 15: (a) Extraction of the forehead features; (b)
Extraction of the features of the face silhouette.
4 RESULTS
We analyzed 72 images of 33 people. The images
database generated during the research looked for to
obtain the biggest possible variety of physical types
without worrying about ethnics.
In normalization phase, 90% of the analyzed
images could be normalized. Some images could not
be calibrated because the algorithm used did not
detect the constellations properly in case of beard or
when an image had a little contrast. The accuracy in
detecting the limits of the windows that recover the
images also presented fault.
The extraction process of the feature was
showed efficient in approximately 80% of the cases.
In a small quantity of images, the features were not
correctly extracted, because some characteristics as
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
128

fringe on the forehead, glasses and the head
inclination disarray the system.
Based on many tests, anyone could see that each
face region geometry vary a lot, mainly on the
forehead, chin and nose regions. In these situations,
some changes were made on the adaptation model.
We saw also, that the use of glasses can distort the
geometry in the nose region, once the features are
not extracted adequately on the side image.
5 CONCLUSION
This study showed the real possibility to acquire two
images in different moments and process their to
obtain a realistic 3D model of a human face. We also
could see that the illumination homogeneity is
important, but not fundamental. We have got good
results without any additional care about it.
The real possibility to do all process
automatically could be proved. The only human
interference occurs in the initial moment to adjust
the window to limit the model head, all the other
process are made automatically and rapidly.
The time consuming for all execution procedure
is not greater than 32 seconds. This efficiency comes
from that the system knows in advance which
characteristics will be searched, decreasing the
computational effort.
In order to make the process happen without
human interference, it was developed a correction
algorithm for the head inclination, which provided
and excellent alignment between the two images,
making the work of feature research. We should
highlight that the algorithm has its limitations and,
for inclinations over 30%, it can fail, however in
normal conditions, it was showed efficient and it did
not accumulate errors to the synthetic images.
Moreover to extract the features correctly, it is
advisable that the models not present any element
that obstructs some regions of the face.
An improvement of this work would be the
identification of elements, such as, the use of
glasses, fringe and beard. With this recognition, such
occurrences could be eliminated and make the
process possible.
REFERENCES
Akimoto, T., Suenaga, Y., Richard, S.W., 1993.
Automatic creation of 3D facial models, IEEE
Computer Graphics and Applications.
Kurihara, T., Arai, K.,1991. A transformation method for
modeling and animation of the human face from
photographs. In Proceedings of Computer
Animation’91.
Lee, W., Kalra, P., Magnenat-Thalmann, N., 1997. Model
based face reconstruction for animation. In
Proceedings of MMM’97. World Scientific Press.
Lee, W., Magnenat-Thalmann, N., 2000. Fast head
modeling for animation. J. Image Vision Computer. 18
(4).
Coelho, M.M., 1999. Localização e reconhecimento de
características faciais para a codificação de vídeo
baseada em modelos. Master’s dissertation, ITA, São
José dos Campos.
Bravo, D.T., 2006. Modelagem 3D de faces humanas
baseada em informações extraídas de imagens
bidimensionais não calibradas. Master’s dissertation,
ITA, São José dos Campos.
Pandzic, I.S., Forchheimer, R., 2002. MPEG-4 Facial
Animation: the standard, implementation and
applications, John Wiley & Sons. England.
Vezhnevets, V. et al., 2004. Automatic extraction of
frontal facial features. In 6th Asian Conference on
Computer Vision.
Parke, F.I., Waters, K., 1996. Computer Facial Animation,
AK Peters. EUA.
Lindley, C., 1991. Practical image processing in C:
acquisition, manipulation, storage, Jhon Wiley &
Sons. New York.
Lanzarotti, R. et al., 2001. Automatic features detection
for overlapping face images on their 3D range models.
In 11th International Conference on Image Analysis
and Processing.
Goto, T. et al., 2001. Facial feature extraction for quick
3D face modeling. In Signal Processing: Image
Communication.
Ansari, A-N., Abdel-Mottaleb, M., 2003. 3-D face
modeling using two views and a generic face model
with application to 3-D face recognition. In IEEE
Conference on Advanced Video and Signal Based
Surveillance.
2D IMAGES CALIBRATION TO FACIAL FEATURES EXTRACTION
129
