
NEW ADAPTIVE ALGORITHMS FOR OPTIMAL FEATURE
EXTRACTION FROM GAUSSIAN DATA
Youness Aliyari Ghassabeh and Hamid Abrishami Moghaddam
Electrical Engineering Department, K .N. Toosi University of Technology, Tehran, Iran
Keywords: Adaptive learning algorithms, Feature extraction, Covariance matrix, Gaussian data.
Abstract: In this paper, we present new adaptive learning algorithms to extract optimal features from
multidimensional Gaussian data while preserving class separability. For this purpose, we introduce new
adaptive algorithms for the computation of the square root of the inverse covariance matrix
21−
Σ
. We
prove the convergence of the adaptive algorithms by introducing the related cost function and discussing
about its properties and initial conditions. Adaptive nature of the new feature extraction method makes it
appropriate for on-line signal processing and pattern recognition applications. Experimental results using
two-class multidimensional Gaussian data demonstrated the effectiveness of the new adaptive feature
extraction method.
1 INTRODUCTION
Feature extraction is generally considered as a
process of mapping the original measurements into a
more effective feature space. When we have two or
more classes, feature extraction consists of choosing
those features which are the most effective for
preserving class separability in addition to
dimension reduction (Theodoridis, 2003). One of the
most used techniques for this purpose is linear
discriminant analysis (LDA) algorithm. LDA
algorithm has been widely used in signal processing
and pattern recognition applications in which feature
extraction is inevitable, such as face and gesture
recognition and hyper-spectral image processing
(Chang and Ren, 2000; Chen et al., 2000;
Lu et al.
2003) Conventional LDA algorithm is used only in
off-line applications. However, the needs for
dimensionality reduction in real time applications
such as on-line face recognition, motivated
researchers to introduce adaptive versions of LDA.
Chaterjee and Roychowdhury presented an adaptive
algorithm and a self-organizing LDA network for
feature extraction from Gaussian data (Chatterjee
and Roychowdhury, 1997). They introduced an
adaptive method for computation of
21−
Σ
in which
Σ
is the symmetric positive definite scattering
matrix of a random vector sequence. However, they
didn’t introduce any cost function related to their
adaptive algorithm. Therefore, they used the
stochastic approximation theory in order to prove the
convergence of their adaptive equation and outlined
networks for feature extraction. On the other hand,
the approach presented in (Chatterjee and
Roychowdhury, 1997) suffers from low convergence
rate. Recently, Abrishami Moghaddam et al. (2003;
2005) proposed three new adaptive methods based
on steepest descent, conjugate direction and
Newton-Raphson optimization techniques to hasten
convergence of the adaptive algorithm.
In this study, we present new adaptive algorithms
for the computation of
21−
Σ
. Furthermore, we
introduce a cost function related to these algorithms
and prove their convergence by discussing about the
properties and initial conditions of this cost function.
Existence of the cost function and its
differentiability facilitate the convergence analysis
of the new adaptive algorithms without using
complicated stochastic approximation theory. We
will show effectiveness of these new adaptive
algorithms for extracting optimal features from two-
class multi-dimensional Gaussian sequences.
The organization of the paper is as follows. The
next section describes the fundamentals of optimal
feature extraction from Gaussian data. Section 3,
presents the new adaptive equations and analyzes
their convergence by introducing the related cost
function and discussing about initial conditions.
Section 4, is devoted to simulations and
182
Aliyari Ghassabeh Y. and Abrishami Moghaddam H. (2007).
NEW ADAPTIVE ALGORITHMS FOR OPTIMAL FEATURE EXTRACTION FROM GAUSSIAN DATA.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications, pages 182-187
DOI: 10.5220/0002067501820187
Copyright
c
SciTePress

experimental results. Finally, concluding remarks
are given in section 5.
2 OPTIMAL FEATURES FOR
GAUSSIAN DATA
Let
},...,,{
21 L
ω
ω
ω
be the L classes in which our
patterns belong and
n
ℜ∈x
be a pattern vector
whose mixture distribution is given by
)(xp
. In a
sequel, it is assumed that a priori
probabilities
LiP
i
,...,1,)( =
ω
, are known. If they
are not explicitly known, they can easily be
estimated from the available training vectors. For
example, if N is the total number of available
training patterns and N
i
(i=1,…,L) of them belong
to
i
ω
, then
NN)(P
ii
≈ω
. Consider conditional
probability densities
Lip
i
,...1,)|( =
ω
x
and
posterior probabilities
LiP
i
,...1, )( =x
ω
are known.
Using Bayes classification rule, we can state that the
pattern
x
is classified to
i
ω
if
ijandLjiPP
ji
≠
=
> ,...,1,,)|()|( xx
ω
ω
In other words, the L a posteriori probability
functions, mentioned above, are sufficient statistics,
and carry all information for classification in the
Bayes sense. The Bayes classifier in this feature
space is a piecewise bisector classifier which is its
simplest form (Fukunaga, 1990). Gaussian
distribution in general has a density function in the
following form
where the distance function
)(
2
xd
, is defined by:
Which
n
ℜ∈x is a random vector,
Σ
is a
nn
×
symmetric covariance matrix and
m
is a
1
×
n
vector
denoted mean value of the random sequence.
Considering the feature:
)(pln)(Pln)|(pln)|(Pln
iii
xxx −ω
+
ω=ω
(3)
for class
i
ω
,
, i=1,…L, it will appear that,
)|( ln
i
p
ω
x
is the relevant feature for class
i
ω
(recalling that in feature extraction, additive and
multiplicative constants do not modify the subspace
onto which the distributions are mapped). Supposing
unimodal Gaussian distribution, the feature
)|( ln
i
p
ω
x
reduces to a quadratic function
)(x
i
f
,
defined as:
Lif
ii
t
ii
,...1 , )()()(
1
=−−=
−
mxΣmxx
(4)
where
i
m
and
i
Σ
are the class
i
ω
’s mean value
and covariance matrix, respectively. The
function
)(x
i
f
, can be expressed in the form of a
norm function ( Fukunaga, 1990) :
Lif
iii
,...,1,||)(||)(
2
2
1
=−=
−
mxΣx
(5)
From the above discussion, it is clear that
function
)(x
i
f
is the sufficient information for
classification of Gaussian data with minimum Bayes
error. In other words, after computation of
)(x
i
f
for
i=1 …,L, it is easy to decide about classification of
the unknown vector
x
. Generally speaking, in on-
line applications, the values of
21−
Σ
and
i
m
are
unknown. Therefore, we should find a rule for
adaptive estimation of these values and
compute
)(x
i
f
. In the next section, a new method for
adaptive computation of
21−
Σ
will be presented.
In addition, we introduce a cost function related to
this adaptive equation, and use it for proving its
convergence.
3 ADAPTIVE COMPUTATION
OF
21−
Σ
AND
CONVERGENCE PROOF
We define the cost function
)(wJ
with
parameter
W
ℜ→ℜ
×nn
J :
as follows:
)(
3
)(
)(
3
W
xxW
W tr
tr
J
t
−=
(6)
)(wJ
, is a continuous function with respect to
W
.
The expected value of J (for constant
W
) is given
by:
)(
3
)(
))((
3
W
ΣW
W tr
tr
JE −=
(7)
where
Σ
is the covariance matrix. The first
derivative of E(J) is computed as follows (assuming
that
W
is a symmetric matrix) (Magnus, Neudecker,
1999):
IΣWWWΣΣW
W
W
−++=
∂
∂
3) (
))((
22
JE
(8)
)(
2
1
2
1
2
2
||)2(
1
),(
x
Σ
Σm
d
n
eN
−
=
π
(1)
)()()(
12
mxΣmxx −−=
−t
d
(2)
NEW ADAPTIVE ALGORITHMS FOR EXTRACTING OPTIMAL FEATURES FROM GAUSSIAN DATA
183

The unique zero solution of (8) is
21−
Σ
, the
second derivative of the expected value of the cost
function is equal to (Magnus, Neudecker, 1999):
WΣΣWIΣWΣWI
W
W
⊗+⊗+⊗+⊗=
∂
∂
)(2)(2
))((
2
2
JE
(9)
In (9) it is assumed that
W
is a symmetric matrix
that it commutes with
Σ
. If we substitute
W
in (9)
with
21−
Σ
, the answer will be:
21212121
ΣW
ΣΣΣΣIΣΣI
W
W
21
−−
=
⊗+⊗+⊗+⊗
=
∂
∂
−
)(2)(2
))(J(E
2
2
(10)
where (10) is a positive definite matrix. From the
above discussion, it can be concluded that the cost
function
)(wJ
has a minimum that occurs at
21−
Σ
(Magnus, Neudecker, 1999). Using the gradient
descent optimization method (Widrow, Stearns,
1985; Hagan, Demuth, 2002), we obtain the
following adaptive equation for the computation
of
21−
Σ
:
)3)((
)
)(
(
2
111111
2
1
k
t
kkk
t
kkk
t
kkkk
kkkk
I
J
WxxWxxWxxW
W
W
W
WW
++++++
+
++−
+=
∂
∂
−+=
η
η
(11)
In (11),
1+k
W
is the estimation of
21−
Σ
in k+1-
th iteration.
k
η
is the step size and
1+k
x is the input
vector at iteration k+1. Equation (11) updates the
estimation of
21−
Σ
, using the last estimation and
the present input vector. The only constraint on (11)
is its initial condition. That means
0
W
must be a
symmetric and positive definite matrix
satisfying
00
ΣWΣW =
. It is quite easy to prove that if
0
W
is a symmetric and positive definite matrix, then
all values of
i
W
( i=2,3,…) will be symmetric and
positive definite. Therefore, the final estimation also
will have these properties (which are essential for
covariance matrix). To avoid confusion for choosing
the initial value
0
W
, we considered
0
W
equal to
identity matrix multiplied by a positive constant
(
0
W
=αI).
According to the result reported by (Kushner,
Clarck, 1978; Benveniste, Metivier, 1990), the
stochastic gradient algorithm in the form of:
),(
11 ++
−=
kkkkk
Yf
θ
η
WW
(12)
where f(θ,y)=grad
θ
F(θ,y) and (Y
k
)
k>0
are
independent identically distributed
n
ℜ
-valued
random variables, converges almost surely towards a
solution of the minimization problem: min
θ
E (F
(θ,Y)). As indicated in (12), in order to minimize E
(F (θ,Y)), the stochastic gradient algorithm uses the
random variable f(θ,Y) instead of its expectation in
the ordinary gradient method. The above argument
is another approach for proving the convergence of
(11) towards
21−
Σ
.
It is easy to show that if
0
W
considered a
symmetric and positive definite matrix which satisfy
00
ΣWΣW
=
then expected value of (11) will be equal
to the following equations:
Therefore (11) is simplified to three more
efficient forms as follows:
)(
11
2
1
t
kkkkkk +++
−+= xxWIWW
η
(14)
)(
11
2
1
t
kkkkkk +++
−+= xxWIWW
η
(15)
)(
111 k
t
kkkkkk
WxxWIWW
+++
−+=
η
(16)
Existence of the cost function for the new
adaptive
21−
Σ
algorithms has the following
advantages compared to the former one (Chatterjee
and Roychowdhury, 1997): i) it simplifies the task
for proving the convergence; ii) it helps to evaluate
the accuracy of the current solutions. For example,
in the cases of different initial conditions and
various learning rates, one is enable to evaluate
which initial condition and learning rate outperform
others. Furthermore, the former adaptive equation in
(Chatterjee and Roychowdhury, 1997) uses a fix or
monotonically decreasing learning rate which results
in low convergence speed, but introducing a cost
function related to the adaptive algorithm make it
possible to determine the learning rate efficiently in
every stage in order to increase the convergence rate.
There are different methods for adaptive
estimation of the mean vector. The following
equation was used in (Chatterjee and
Roychowdhury, 1997; Abrishami Moghaddam et al.,
2003; 2005):
)(
11 kkkkk
mxmm −
+
=
++
η
(17)
where η
k
satisfies Ljung assumptions ( Ljung ,
1977) for the step size. Alternatively, one may use
the following equation (Ozawa et al., 2005; Pang et
al., 2005):
)(
) (
)()(E
kk
kkkk
kk1k
2
k
2
k
ΣWIW
WΣWIW
ΣWIWW
−η+=
−η+=
−η+=
+
(13)
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
184
11
1
1
+
+
+
=
+
+
kk
k
k
kk
x
mm
(18)
For the experiments reported in the next section,
we used (17) in order to estimate the mean value in
each iteration.
4 SIMULATION RESULTS
In this section, we used on of the (14-16) described
in the previous section to estimate
21−
Σ
and
extracted features from Gaussian data for
classification
.
4.1 Experiments on
21−
Σ
Algorithm
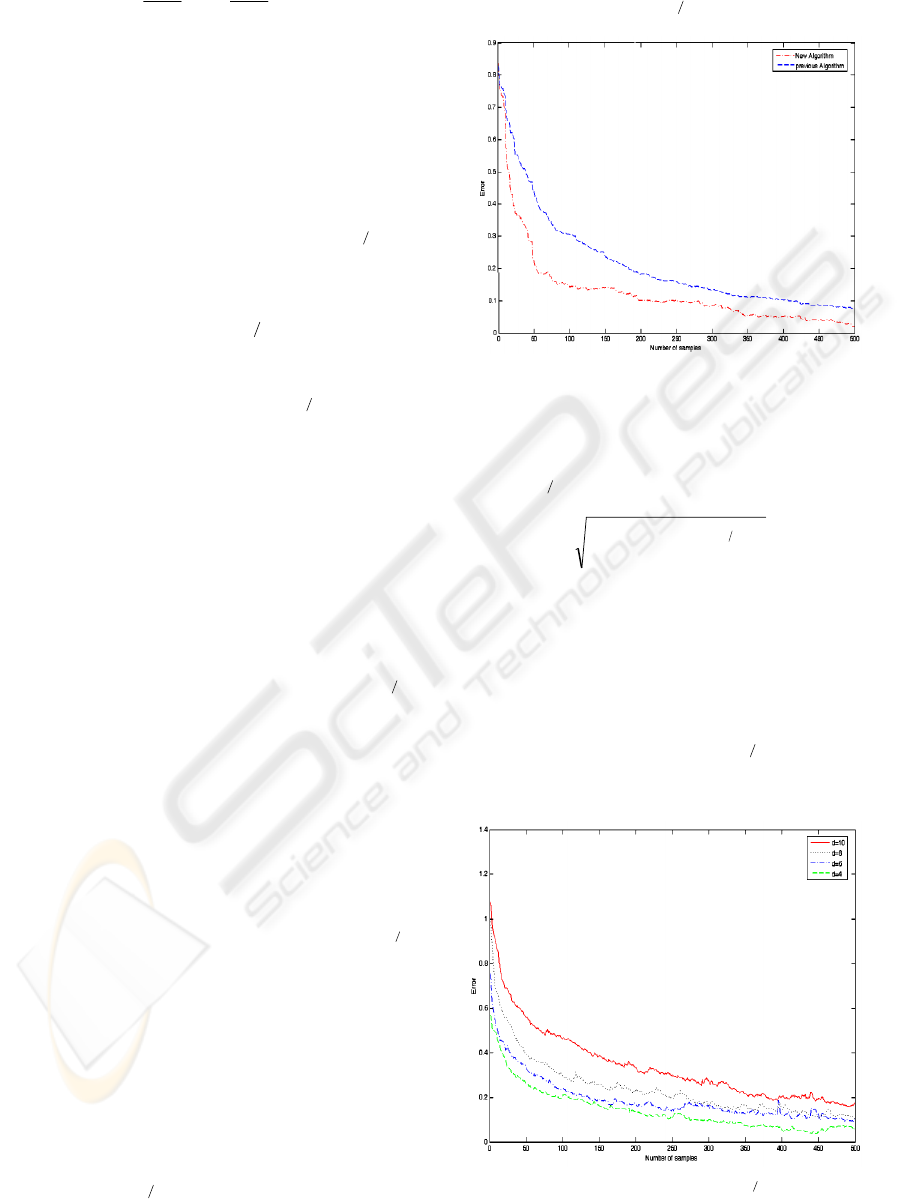
In the first experiment, we compared the
convergence of the new adaptive
21−
Σ
algorithm
with the algorithm proposed in (Chatterjee and
Roychowdhury, 1997). We used the first covariance
matrix in (Okada and Tomita, 1985), which is a
1010 ×
covariance matrix and multiplied it, by 20
(Figure 1). The ten eigenvalues of this matrix in
descending order are 117.996, 55.644, 34.175,
7.873, 5.878, 1.743, 1.423, 1.213 and 1.007. Figure
2 compares the error of each algorithm as a function
of sample number. As illustrated, the new algorithm
can converges with an accelerated rate than the
previous algorithm. We also compared the
convergence rate of the new adaptive
21−
Σ
algorithm in 4, 6, 8 and 10 dimensional spaces.
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−−−
−−−−
−−−−−−
−−
−−−
−−
−−
−
=Σ
341.0015.0028.0120.0095.0003.0003.0030.0065.0032.0
067.0078.0011.0005.0008.0001.0041.
0031.0002.0
450.1343.0248.0069.0022.0298.0057.0030.0
750.2544.0058.0042.0038.0154.00155
720.5088.0016.0450.0367.0136.0
071.0005.0055.0011.0010.0
084.0017.0028.0005.0
430.1018.0
053.0
373.0038.0
091.0
20
Figure 1: Sample covariance matrix used in
21−
Σ
experiments.
We used the same covariance matrix as in the
first experiment for generating 10 dimensional data
and three other matrices were selected as the
principal minors of that matrix.
In all experiments, we chose the initial value
0
W
equal to identity matrix multiplied by 0.6, and then
using a sequence of Gaussian input data (training
data) estimated
21−
Σ
. For each covariance matrix,
we generated 500 samples of zero-mean Gaussian
data and estimated the
21−
Σ
matrix using (14).
Figure 2: Comparison of convergence rate between new
algorithm and previous algorithm.
For each experiment, at k-th iteration, we
computed the error e(k) between the estimated and
actual
21−
Σ
matrices by:
∑∑
==
−
−=
n
i
n
j
actualij
kke
11
221
))(()( ΣW
(19)
For each covariance matrix, we computed the
norm of error in every iteration. Figure 3 shows
values of the error during iterations for each
covariance matrix. The final values of error after 500
samples are error=0.169 for d=10, error=0.118 for
d=8, error=0.102 for d=6 and error=0.0705 for d=4.
As expected, the simulation results confirmed the
convergence of (14) toward the
21−
Σ
. We repeated
the same experiment using (15) and (16) and
obtained similar results.
Figure 3: Convergence of the
21−
Σ
algorithm for
different covariance matrices.
NEW ADAPTIVE ALGORITHMS FOR EXTRACTING OPTIMAL FEATURES FROM GAUSSIAN DATA
185
4.2 Extracting Optimal Features from
Two Class Gaussian Data
As discussed in section 2, it is apparent that for
Gaussian data, the feature
)(x
i
f
is equal
to
221
||)(||
ii
mxΣ −
−
, using (14-16), (17) and the
training sample sequence, we estimated
21−
Σ
and
i
m
.
For each training data belong to
i
ω
,
we updated
first
21−
Σ
using (14-16) and then refreshed
i
m
by
applying (17), finally, we computed the norm
of
)(
21
i
k
ii
mxΣ −
−
. After computation of the mean
value and
21−
Σ
according to (5), it is possible to
classify the next coming Gaussian data. At the end
of this process, we compute the number of
misclassifications. For testing the effectiveness of
(14-16) in the case of two class Gaussian data, we
generated 500 samples of 2 dimensional Gaussian
data; each sample belonged to one of two classes
with different covariance matrices and mean vectors.
For each pattern
x
, we extracted features
)(
1
xf
and
)(
2
xf
. According to these optimal
features, we transformed incoming Gaussian data
into optimal feature space. Figures 4 and 5 show the
comparison between samples in the original space
and transformed samples in the optimal feature
space. Two Gaussian classes
1
ω
and
2
ω
had the
following parameters:
⎥
⎦
⎤
⎢
⎣
⎡
=
⎥
⎦
⎤
⎢
⎣
⎡
−
=
⎥
⎦
⎤
⎢
⎣
⎡
=
⎥
⎦
⎤
⎢
⎣
⎡
−
=
20
02
,
2
2
,
32
23
,
2
2
2211
QmQm
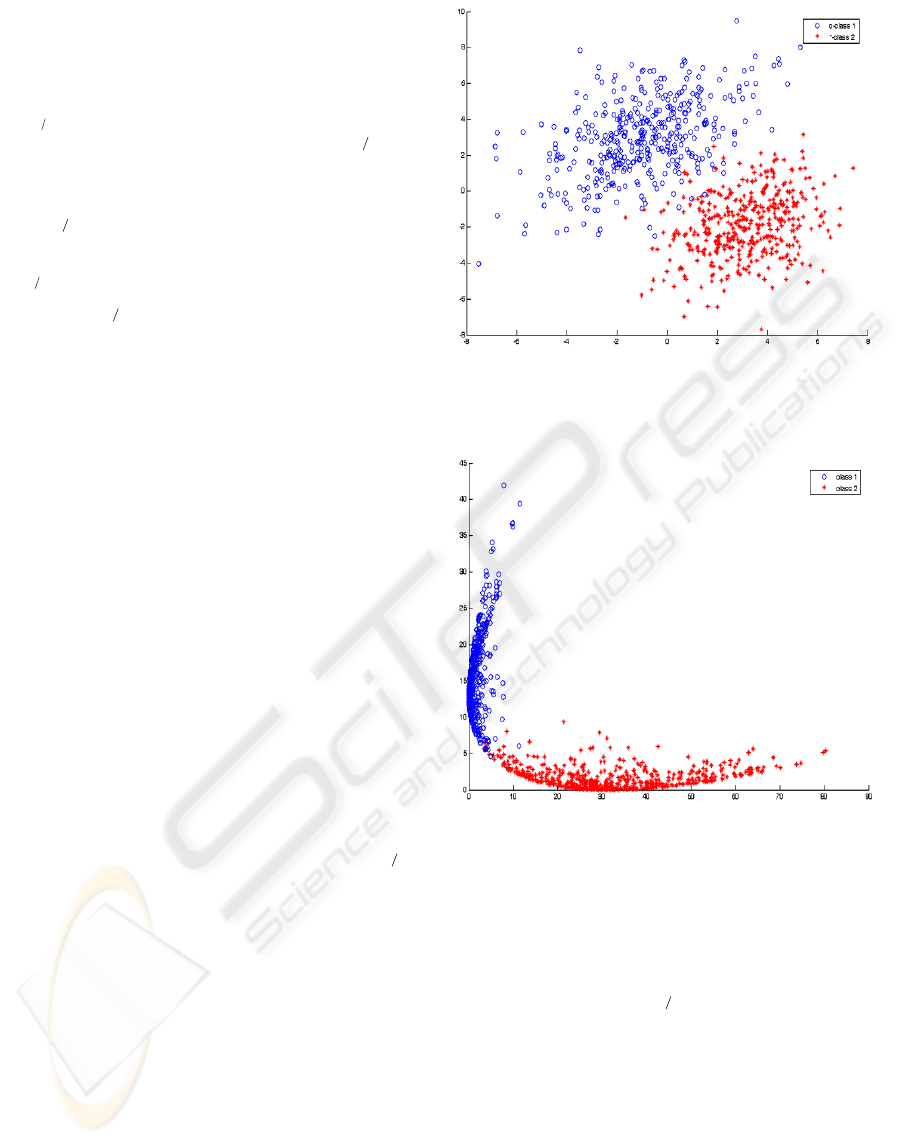
Figure 4 shows the distribution of samples from
two classes. It is obvious that two classes are not
linearly distinguishable. After estimation of
21−
Σ
by (14-16) and estimation of
i
m
by (17), we are
able to extract f
1
and f
2
from the training data.
Figure 5 shows the transformed data in optimal
feature space. It is apparent from Figure 5 that two
Gaussian classes are linearly separable in the
optimal feature space. In other words, in the optimal
feature space, we can draw a straight line to separate
two classes However, in their original space; two
classes are overlapped and are not linearly separable.
By extracting optimal features, only 9 sample data
among 1000 total sample, were misclassified by a
linear classifier.
Figure 4: Distribution of two class Gaussian data in the
original space.
Figure 5: Distribution of two class Gaussian data in the
optimal feature space.
5 CONCLUSIONS
In this paper, we presented new adaptive algorithms
for computation of
21−
Σ
and introduced a cost
function related to them. We proved the
convergence of the proposed algorithms using the
continuity and initial conditions of the cost function.
Simulation results on two class Gaussian data
demonstrated the performance of the proposed
algorithms for extracting optimal class separability
features. The experimental results show that these
new adaptive algorithms can be used in many fields
of on-line application such as feature extraction for
face and gesture recognition. Existence of the cost
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
186

function and adaptive nature of the proposed
algorithm, make it appropriate to implement related
neural networks for different real time application.
ACKNOWLEDGEMENTS
This project was partially supported by Iranian
telecommunication research center (ITRC).
REFERENCES
S. Theodoridis, 2003, Pattern Recognition, Academic
Press, New York, 2
nd
Edition.
C. Chang, H. Ren, 2000, An Experimented-based
quantitative and comparative analysis of target
detection and image classification algorithms for
hyper-spectral imagery, IEEE Trans. Geosci. Remote
Sensing, Vol.38, No. 2, pp. 1044-1063.
L. Chen, H. Mark Liao, J. Lin, M. Ko, G. Yu, 2000, A
new LDA based face recognition system which can
solve the small sample size problem, Pattern
Recognition., No. 33, pp. 1713-1726.
J, Lu, K. N. Plataniotis, A. N. Venetsanopoulos, 2003,
Face recognition using LDA-based algorithms, IEEE
Trans. Neural Networks, Vol. 14, No.1, pp. 195-200.
C. Chatterjee, V.P. Roychowdhury, 1997, On self-
organizing algorithm and networks for class-
separability features, IEEE Trans. Neural Network,
Vol. 8, No.3, pp 663-678.
H. Abrishami Moghaddam, Kh. Amiri Zadeh, 2003, Fast
adaptive algorithms and networks for class-
separability features, Pattern Recognition, Vol. 36,
No. 8, pp. 1695-1702.
H.Abrishami Moghaddam, M.Matinfar, S.M. Sajad
Sadough, Kh. Amiri Zadeh, 2005, Algorithms and
networks for accelerated convergence of adaptive
LDA, Pattern Recognition, Vol. 38, No. 4, pp. 473-
483.
K. Fukunaga, 1990, Introduction to Statistical Pattern
Recognition, Academic Press, New York, 2
nd
Edition.
J.R. Magnus, H. Neudecker, 1999, Matrix Differential
Calculus, John Wiley.
B.Widrow, S. Stearns, 1985, Adaptive Signal Processing,
Prentice-Hall.
M. Hagan, H. Demuth, 2002, Neural Network Design,
PWS Publishing Company.
H. J. Kushner, D. S. Clarck, 1978, Stochastic
approximatiom methods for constrained and
unconstrained systems, Speringer Verlog.
A. Benveniste, M. Metivier, P. Priouret, 1990, Adaptive
algorithms and stochastic approximations, Academic
Press, New York, 2
nd
Edition.
L. Ljung, 1977, Analysis of recursive stochastic
algorithms , IEEE Trans. Automat Control, Vol. 22,
pp. 551-575, Aug. 1977.
S. Ozawa, S. L. Toh, S. Abe, S. Pang, N. Kasabov, 2005,
Incremental learning of feature space and classifier for
face recognition, Neural Networks, Vol. 18, pp. 575-
584.
S. Pang, S. Ozawa, N. Kasabov, 2005, Incremental linear
discriminant analysis for classification of data
streams”, IEEE Trans. on Systems, Man and
Cybernetics, Vol. 35, No. 5, pp. 905-914.
T. Okada, S.Tomita, 1985, An Optimal orthonormal
system for discriminant analysis, Pattern Recognition,
Vol. 18, No.2, pp. 139-144.
NEW ADAPTIVE ALGORITHMS FOR EXTRACTING OPTIMAL FEATURES FROM GAUSSIAN DATA
187
