
An Unsupervised Approach for Adaptive Color
Segmentation
Ulrich Kaufmann
1
, Roland Reichle
2
, Christof Hoppe
2
and Philipp A. Baer
2
1
Institute of Neural Information Processing, Un iversity of Ulm
James-Franck-Ring, 89069 Ulm, Germany
2
Distributed Systems Group, University of Kassel
Wilhelmsh
¨
oher Allee 73, 34121 Kassel, Germany
Abstract. One of the key requirements of robotic vision systems for real-life
application is the ability to deal with varying lighting conditions. Many systems
rely on color-based object or feature detection using color segmentation. A static
approach based on preinitialized calibration data is not likely to perform very well
under natural light. In this paper we present an unsupervised approach for color
segmentation which is able to self-adapt to varying lighting conditions during
run-time. The approach comprises two steps: initialization and iterative tracking
of color regions. Its applicability has been tested on vision systems of soccer
robots participating in RoboCup tournaments.
1 Introduction
In recent developments, vision systems more and more emerge as the main sensory
component of autonomous mobile robots. In real-world scenarios, one of the key re-
quirements is the ability to deal with natural light and varying lighting conditions. How-
ever, this remains a very challenging task and topic of research, as shown, for example,
by the efforts of the RoboCup community. RoboCup [7] is an international joint project
attempting to foster research in robotics, artificial intelligence and related fields. One
of the long-term goals of the RoboCup initiative is to create soccer robots capable of
playing on typical soccer playgrounds. These include, but are not limited to, outdoor
soccer fields under natural light.
So far, RoboCup tournaments exhibit constant artificial lighting conditions. Only
minimal changes in lighting are allowed, such as caused by sunlight coming through
windows. The transition to natural light is performed only slowly. The main reason is
that in order to detect the color-marked objects like the ball, goals, opponents, or team
members, the robot vision systems are based on color segmentation approaches. Color
segmentation reduces the number of colors by combining color regions to single colors
or filtering out irrelevant colors. Usually color segmentation depends on calibration data
gathered before a game which identify color regions of interest in a color space.
Nevertheless, static approaches are not able to deal with natural illumination with
varying temporal dynamics. There may be slow changes in lighting during the day
Kaufmann U., Reichle R., Hoppe C. and A. Baer P. (2007).
An Unsupervised Approach for Adaptive Color Segmentation.
In Robot Vision, pages 3-12
DOI: 10.5220/0002066200030012
Copyright
c
SciTePress

or fast changes caused by passing clouds. In order to be able to deal with such un-
stable lighting conditions, this paper presents an unsupervised, self-adapting approach
for color segmentation, comprising two steps: The first step detects and initializes the
color regions of interest. The second step tracks these regions iteratively during run-
time. The approach is, as already mentioned, completely unsupervised as the user is not
confronted with parameter adjustment at all. The only information required a-priori is
a very rough estimation of the problem-specific color regions of interest in the color
space.
The remainder of the paper is organized as follows. Section 2 discusses related
work facing similar challenges or applying similar techniques. In section 3 the overall
approach is introduced and the algorithms for each step are presented in detail. Section
4 presents the results of the experimental evaluation. The last section summarizes the
main contributions of the paper and hints at future work.
2 Related Work
In many industrial and research applications, color provides a strong clue for object
recognition to be performed by robotic vision systems. Therefore, camera calibration
and color indexing are important topics in robotics research. One of the key challenges
for such systems is the ability to cope with changing lighting conditions.
In [6], Mayer et al. present a case study which discusses various lighting conditions,
ranging from artificial to natural light, and their effect for image processing and vision
routines. As a result, they conclude that dynamic approaches for color segmentation
are required under these conditions. J
¨
ungel et al. [5, 4] describe a calibration approach
which initially looks for regions of a reference color (e.g. green as in the RoboCup 4-
Legged League which is used as example scenario) applying simple heuristics. Based
on these regions, the regions of the remaining predefined colors are determined in the
YUV color space, maintaining their relative placement. However, this approach can
be considered as risky, since relative distances of the color regions of interest are not
constant and may be stretched by changes in illumination [6]. A somewhat different
approach is presented by G
¨
onner et al. in [2]. They calculate chrominance histograms
representing the frequency of color values of specific objects. The relative frequency
of the color values corresponds to the conditional a-priori probability of a certain color
value, assuming a certain object is present. The a-posteriori probability of a color value
being assigned to some specific object is derived from a Bayesian combination of these
chrominance histograms. However, for creating the initial a-priori probability distribu-
tion the approach relies on elaborate object recognition mechanisms. Very similar to our
approach, a contribution by Anzani et al. [1] describes a method for initial estimation of
color regions and their tracking to cope with changes in illumination. The color regions
are represented as a mixture of 3D-Gaussians (ellipsoids) in the HSV color space. The
tracking of color regions is realized by applying the EM algorithm. In contrast to our
approach, however, this method has to deal with the problem of determining the optimal
number of ellipsoids representing the color region, in order to avoid overfitting of noise
and to prevent a too rough representation. In our approach, noise elimination mecha-
nisms are integrated for the initialization step and also for the tracking. This allows us
4

to represent the relevant color regions in a very fine-grained manner without the risk of
overfitting noise.
Heinemann et al. [3] propose another technique which also allows the modification
of the color-mapping function over time using a set of scenario-dependent assumptions.
For this approach, the position of the robot is required a-priori. Another method for
generating segmentation tables is to use the fixed positions and the shaping of known
objects. Before the start of a mission, these objects are scanned and their color data are
used for calibration [8, 9]. Similar as for the approach of Heinemann, a great amount of
problem-sepcific knowledge is required.
3 Approach
As sketched in the RoboCup scenario described in section 1, many vision systems
face the challenge to detect colored objects. However, natural lighting conditions cause
even very homogeneously colored objects to exhibit a high number of different shad-
ings. Thus, segmentation approaches are commonly used to simplify object recognition:
Color regions within a color space are mapped to an ideal color or representing color
labels; irrelevant colors are filtered out. Each region is minimal, as larger regions would
include shadings that do not belong to the objects in question. Under natural ligtht-
ing conditions, traditional static segmentation approaches are likely to fail: Shadings
mapped to a single color label may change. Thus, the mappings need to be adjusted.
As already introduced above, our approach is able to initialize the color regions and
to adapt the regions with regard to the changing lighting conditions in a completely
unsupervised manner. It is divided into two different steps: The first step determines
the initialization, the second step tracks the color regions. As it is an unsupervised
approach, the user does not have to deal with parameter adjustment or an extensive
calibration process at all. Only three prerequisites must be met:
– The colors of interest must be known with regard to a very rough rectangular esti-
mation in the UV dimensions of the YUV color space.
– Objects of interest have to be colored fairly homogeneously.
– Changes in lighting conditions are not abrupt (e.g. turning on and off floodlights),
but provide a kind of smooth transition.
The initialization and the tracking are working on two different color spaces: (i)
UV as the projected subspace from the YUV color space and (ii) H-RGB as RGB color
space enhanced by the H dimension of the HSV space. These color spaces have proven
to be very suitable for these two problems. UV is used by the initialization algorithm
providing a kind of partitioning of the color space with regard to the identification of
dense regions, i.e. regions that represent a major number of pixels. Therefore, the two-
dimensional (yet the full color information containing) UV color space is chosen, as
dense regions emerge with higher probability in a low-dimensional color space. For the
tracking algorithm the situation is different. As the regions for the different colors are
tracked separately, it is necessary to optimize the spatial distribution of the pixels in
the color space, in order to avoid melting of one color region into another. Therefore,
the four-dimensional H-RGB color space is used which proved to provide a sufficient
spatial distribution. The next two paragraphs present the algorithms in detail.
5

3.1 Initialization
To establish the initial mapping of color regions to color labels, the following algorithm
is executed before the game or mission. It consists of six steps applied only to the
UV dimensions of the YUV color space, as mentioned above. The Y dimension is
discarded to be as independent from illumination influences as possible. It is only used
in a preprocessing step to discard too light or dark pixels, i.e. pixels with an Y value
beyond certain thresholds.
1. A 256 × 256 UV-histogram is created from a number of images that contain objects
and the colors of interest. About two to five images are required here.
2. The histogram is logarithmized and smoothened with a gaussian low-pass filter
(σ = 1, 7, mask size = 5 pixel). This suppresses local maxima which are not
relevant for the further processing steps.
3. Each of the remaining local maxima represents an initial color region. The color
values are assigned to a region represented by a local maxima using a Hill Climbing
algorithm. If the hill climbing path ends at a point not assigned to a color region, a
new initial color region is created. Thus, no method is required to detect the local
maxima upfront.
4. The previous steps usually produce 10 − 20 initial color regions. Many of these
regions contain irrelevant colors and thus have to be considered as noise. They can
be eliminated by applying very simple heuristics:
(a) Color regions consisting of only a very small number of pixels are said to be
noise.
(b) Color regions formed by pixels which are widely distributed over the images
can be discarded as well. This assumption holds, because the surface of an
object most probably extends on a quite compact area within the image. The
standard deviation of the distances of the pixels in the image to the center of
the surface is one measure for compactness we use. (Different others are also
possible, though.)
5. Color labels are assigned to the remaining initial color regions. These labels are
determined by a very rough rectangular estimation of the colors of interest in the
UV space. The label is the ideal color lying next to the center of the color region.
3.2 Iterative Tracking of Color Regions
The iterative color tracking adapts the pre-initialized color regions over time to over-
come changes in the lighting conditions. On the one hand it must be possible to modify
a region’s size and position in the color space. On the other hand, color regions with
different labels must not be merged. The algorithm must be able to adapt to color dis-
placement which is, for example, caused by clouds that are passing by. Abrupt changes
in lighting conditions are not considered here. To optimize the spatial separation of the
color regions, a new dimension is added to the RGB color space: The hue value (H
dimension) provided by the HSV color space. It represents the angle of the color in the
HSV color circle and thus introduces a linearly independent component. In this four-
dimensional color space our algorithm performs the computations described below.
6

1. A set of preliminary color regions of interest, as provided by the initialization step,
is assumed. Several images, e.g. five, are taken to form data pools for each color
of interest. All pixels of the images with a color value contained in a color region
are inserted into the corresponding data pool. All elements of the data pools are
then transformed into the H-RGB space. The resulting data cloud for a data pool
is then examined by its location and size and represented through uniformly dis-
tributed centers. The locations of the centers are calculated hierarchically. For each
data cloud a sum-histogram of all H-values is generated. Adjacent H-values with
a relative frequency above a given threshold form ranges within this histogram.
These ranges are divided into equidistant bins with a predefined width. The last bin
in each range may be smaller. In the next step, sum-histograms of the R-values are
generated for each bin. This procedure is applied to each dimension of the H-RGB
color space. As a result, hypercubes within the H-RGB space are formed. In order
to reduce noise, the density of data points within a hypercube must exceed a given
threshold. The distance between two centers is given by the bin width for each di-
rection. The result of this first step is an aggregation of hypercubes in the H-RGB
color space for each color label.
2. To determine the new color segmentation, the location of each pixel is now exam-
ined: If it is in the proximity of a center, it is assigned the color label of this center.
The proximity of a center is defined as the surrounding hypercube.
3. The following procedure is applied to every n-th image. n depends on the proba-
bility of changes in the lighting conditions, n = 50, for example.
New hypercubes are defined for all centers of a color label. They are chosen some-
what larger than for the color segmentation in the previous step. This allows to take
pixels into account which are not represented yet. The size of the hypercubes must
not be chosen too large in order to keep separate color regions disconnected.
All pixels of one or more images are examined whether they are represented by
a label’s hypercube. If this is true, they are stored in a data vector for this label.
To retain the history of past images to some degree, at most 60% of the old vector
elements are overwritten. As in the first step, an aggregation of hypercubes in the
H-RGB space is created for each data vector. The segmentation of the next image
is based on these new aggregrations.
4 Experimental Evaluation
For the experimental evaluation of our approach we use the RoboCup scenario and
the vision systems of a team of soccer robots that participated in the RoboCup World
Championships 2006. The basic challenge of these vision systems is to detect the color-
marked objects, like the ball (red) and the goals (blue and yellow). These systems are
commonly used for more elaborate tasks like detection of teammates and opponents or
the extraction of features used for self-localization as well. In our evaluation, however,
we only focus on tracking the color regions for the ball, the goals, and for the green
playing ground.
In order to be able to assess the applicability of our approach, we use a set of test im-
ages from different locations with completely different lighting conditions and different
7
dynamics of the changes in the lighting. Corresponding to the two separate parts of our
approach, the evaluation of the initialization and the tracking is presented separately, as
well.
For the evaluation of the Initialization of the color regions, we use a test set of 35
images from three different situations: (i) Playing ground at the RoboCup world cham-
pionships 2006 in Bremen, Germany, (ii) a lawn in front of a building of the University
of Kassel with natural lighting conditions, and (iii) the same lawn on another day with
a more closed aperture. First we performed a manual segmentation of the images with
the help of a calibration tool. Afterwards the images are also processed with our unsu-
pervised initialization approach. In addition, for each of the images masks are provided
that only include the pixels of the objects of interest. In order to estimate the quality of
our initialization approach, three different values are calculated:
1. Percentage of pixels of an object mask that are segmented correctly (Coverage)
2. Percentage of pixels associated to a color label by the manual segmentation that are
assigned to the same color label by the unsupervised approach (Agreement)
3. Percentage of pixels associated to a color label by the unsupervised approach but
not assigned to the same color label by the manual segementation (Disagreement)
Coverage indicates how well the objects of interest are covered by the segmentation.
Agreement and Disagreement allow a comparison between the manual segmentation
and the unsupervised approach. A high Agreement value and a low Disagreement value
indicate that the manual and unsupervised approach provide very similar segmentation
results. The average values for the 35 images are shown in table 1.
Table 1. Comparison of the unsupervised initialization approach with a manual segmentation.
red blue yellow green
Coverage 53% 77% 93% 89%
Agreement 40% 78% 81% 88%
Disagreement 22% 23% 6% 10%
The numbers show that big parts of the blue and yellow goals and the green playing
ground are classified correctly, and also that the results provided by the unsupervised
and the manual approach are very similar for these colors. The only exception is the
red ball. Here only about fifty percent of the surface is covered and the manual and
unsupervised approach differ quite a lot. This can be explained by an overexposure of
the ball surface in a number of images which even makes the manual segmentation
very difficult, and the quite small number of red pixels in comparison with the other
colors of interest. However, for the purposes of our vision systems these values are very
sufficient.
In order to illustrate the results of a segmentation which is purely based on the initial
color regions, figure 1 shows three examples. In the first row, the original images are
shown. It is obvious that they exhibit completely different lighting conditions. The sec-
ond row shows the initial color regions in the UV space determined with our approach,
and the third row shows the resulting segmented images.
8

Fig. 1. Image segmentation based on the initially determined color regions.
The initialization is performed once before the game or the mission. Therefore, the
performance of our algorithm is not relevant. However, the approach proved to be quite
efficient. The average processing time for performing the initialization is about 170ms.
The Iterative Tracking was evaluated using 326 pictures taken in our laboratory,
one every 100 seconds. The robot was equipped with a directed camera that was aligned
to one fixed scenery on the field. The lighting conditions changed over the day since
both, artificial and natural light sources were present. Natural light came through a win-
dow front nearby the field. As an example, we analyzed the effect of changing light-
ing conditions with regard to the deviation of all yellow pixels in the H (color) and V
(brightness) dimensions of the HSV color space. Within a time span of 100 sec the max-
imum deviation of H was 2
◦
and 13 units in the H dimension, within 300 sec 4
◦
in the
H dimension and 19 units in the V dimension. The iterative tracking approach was able
to follow the changes for the whole day. We started with initial color regions provided
by our initialization approach and all the pictures got segmented appropriately.
In order to have an exact evaluation of what our tracking approach is capable of,
we manually modified pictures of the directed camera and pictures taken by RoboCup
9
robots equipped with an omnidirectional camera. The test set consisted of 15 pictures
and we considered both indoor and outdoor sceneries:
First, we shifted the H-value of the HSV color space until the iterative tracking
produced wrong or unusable results. The same was done for the V-value. With our
test set, displacements of up to ±10
◦
in the H-value and up to ±20 units in the V-
value are compensated. Colors of very homogeneous surfaces are not tracked anymore
in case of higher derivations. Figure 2 illustrates the benefits of our tracking approach
when shifting the H dimension of the HSV color space by +10
◦
. The original picture is
shown in the left, the middle picture is the segmented version of the artificially modified
one without iterative tracking. The blue and yellow goals are not covered completely. In
the right picture, iterative tracking is enabled; both goals are now covered completely.
The results are nearly the same for changes in the V-value.
Fig. 2. Effect of the iterative tracking when shifting the H dimension of an image by +10
◦
.
We evaluated the pictures with regard to the three measures Coverage, Agreement
and Disagreement in the same way as already presented with the evaluation of the
initialization step. Tables 2 and 3 show the values for the segmentation results with
disabled and enabled tracking.
Table 2. No tracking.
red blue yellow green
Coverage 14% 79% 43% 63%
Agreement 6% 64% 41% 65%
Disagreement 55% 75% 81% 1%
Table 3. Iterative tracking.
red blue yellow green
Coverage 43% 99% 97% 90%
Agreement 14% 83% 92% 93%
Disagreement 30% 80% 69% 1%
The numbers show that with enabled tracking the object Coverage is notably in-
creased for all four colors. This can be observed for the Agreement value as well. In
addition, the values for Disagreement, in particular for yellow and blue, are quite high.
However, this only indicates the fact that the unsupervised tracking approach selects
more pixels of the environment in comparison with the manaul segementation. Due to
10

the same reasons as already mentioned with the initialization approach the results for
the ball are not of the quality that can be observed for the other colors. It has also to
be considered that in the tracking approach, parts of the color space with a very few
number of pixels are regarded as noise. Of course, this effect is more prominent with
color regions which in total contain only a few number of pixels, as e.g. red.
Another benefit of our tracking approach is the ability to cope with sub-optimal ini-
tial color regions and to improve the color regions within some tracking steps. As shown
in figure 1 the initialization failed to provide optimal initial color regions for the image
of the directed camera. Parts of the yellow goal are missing, the ball is not covered
completely and particularly big parts of the green field are not segmented appropriately.
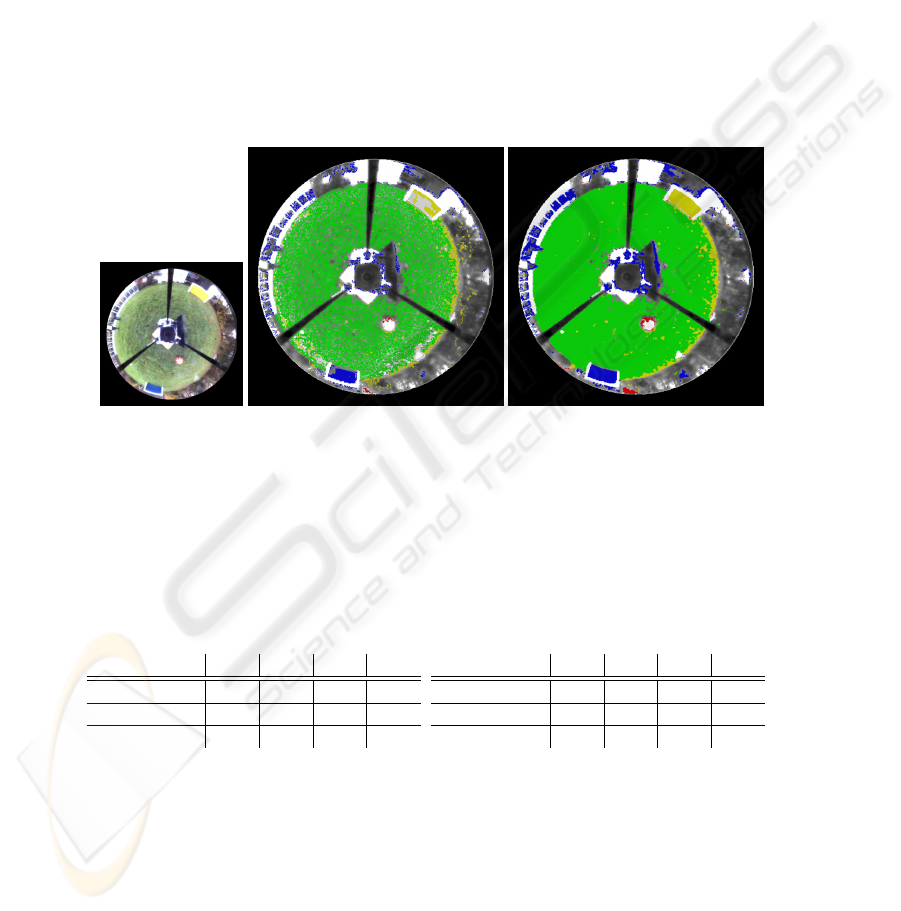
Figure 3 illustrates the segmentation results after some tracking steps. The left picture
shows the original image again. In the middle the segmenation results based on the
initialization is presented. The results after 2 tracking steps are shown on the right: all
three features, the yellow goal, the red ball and the green field are now covered almost
completely. The average processing time for one iterative tracking step (executed on ev-
ery 50th image, for example, which roughly means every 2 seconds assuming a camera
capturing pictures with 30Hz) is between 50 ms and 100 ms in our test. It depends on
the number of calculated centers. So the processing time is very short if the colors are
homogeneous.
Fig. 3. Improvement of sub-optimal initial color regions through iterative tracking.
5 Conclusion and Future Work
In this paper we have presented an unsupervised approach for adaptive color segmen-
tation which is able to deal with varying lighting conditions. The approach comprises
two different steps: An initialization step provides initial regions for the colors of in-
terest. These regions are iteratively tracked during run-time to be adjusted to changes
in illumination. As presented in section 2 there are some other approaches that are
able to provide calibration data for color segmentation automatically. However, some
of these approaches are static and not able to deal with varying lighting conditions.
Others provide this ability but are coupled with object recognition approaches, rely on
form information, or a number of scenario-dependent assumptions. In contrast, our ap-
proach only needs three prerequisites to be fulfilled: a rough rectangular estimation of
the color regions in the UV space, homogeneously colored objects, and fairly smooth
transitions in the lighting conditions. However, these very basic prerequisites can be as-
sumed in most cases. Our approach has revealed to be very powerful and is applicable
for omnidirectional vision systems and for vision systems with a directed camera as
11

well. The experimental evaluation has also shown that the initialization provides appro-
priate initial color regions for a number of different lighting conditions. The iterative
tracking is able to follow the changes in lighting conditions that can be observed during
a whole day. Several different methods might be suitable to improve our approach to
be able to deal with abrupt changes in lighting conditions. One possibility is to run the
initialization step in some time intervals during run-time and to compare the resulting
color regions with the tracked ones. If the differences are too big, the color regions
provided by the initialization algorithm are used for further tracking. This would also
help to make the algorithm more stable and would prevent situations where the tracking
algorithm fails because of two or more melted regions in the H-RGB color space.
References
1. Federico Anzani, Daniele Bosisio, Matteo Matteucci, and Domenico G. Sorrenti. On-line
color calibration in non-stationary environments. In RoboCup 2005 - Proceedings of the
International Symposium, Lecture Notes in Artificial Intelligence, pages 396–407. Springer,
2006.
2. Claudia G
¨
onner, Martin Rous, and Karl-Friedrich Kraiss. Real-time adaptive colour segmenta-
tion for the RoboCup middle size league. In RoboCup 2004 - Proceedings of the International
Symposium, Lecture Notes in Artificial Intelligence, pages 402–409. Springer, 2005.
3. P. Heinemann, F. Sehnke, and A. Zell. Towards a calibration-free robot: The act algorithm
for automatic online color training. In RoboCup 2006 - Proceedings of the International
Symposium, Lecture Notes in Artificial Intelligence. Springer, 2007. to appear.
4. Matthias J
¨
ungel. Using layered color precision for a self-calibrating vision system. In
RoboCup 2004 - Proceedings of the International Symposium, Lecture Notes in Artificial
Intelligence, pages 209–220. Springer, 2005.
5. Matthias J
¨
ungel, Jan Hoffmann, and Martin L
¨
otzsch. A real-time auto-adjusting vision system
for robotic soccer. In Daniel Polani, Brett Browning, and Andrea Bonarini, editors, RoboCup
2003 - Proceedings of the International Symposium, volume 3020 of Lecture Notes in Artifi-
cial Intelligence, pages 214–225, Padova, Italy, 2004. Springer.
6. Gerd Mayer, Hans Utz, and Gerhard K. Kraetzschmar. Towards autonomous vision self-
calibration for soccer robots. Proceeding of the IEEE/RSJ International Conference on Intel-
ligent Robots and Systems (IROS-2002), 1:214–219, September-October 2002.
7. RoboCup Official Site. http://www.robocup.org/.
8. M. Sridharan and P. Stone. Autonomous planned color learning on a legged robot. In RoboCup
2006 - Proceedings of the International Symposium, Lecture Notes in Artificial Intelligence.
Springer, 2007. to appear.
9. Mohan Sridharan and Peter Stone. Towards eliminating manual color calibration at RoboCup.
In RoboCup 2005 - Proceedings of the International Symposium, Lecture Notes in Artificial
Intelligence, pages 673–681. Springer, 2006.
12
