
FAST ADAPTABLE SKIN COLOUR
DETECTION IN RGB SPACE
Martin Tosas
1
and Steven Mills
2
1
School of Computer Science and IT, University of Nottingham, Nottingham, United Kingdom
2
Geospatial Research Center (NZ) Ltd, University of Canterbury, Christchurch, New Zealand
Keywords: Skin Colour Detection, Linear Container, Human Computer Interaction.
Abstract: This paper presents a skin colour classifier that uses a linear container in order to confine a volume of the
RGB space where skin colour is likely to appear. The container can be adapted, using a single training
image, to maximize the detection of a particular skin tonality. The classifier has minimum storage
requirements, it is very fast to evaluate, and despite operating in the RGB space, provides equivalent
illumination (brightness) independence to that of classifiers that work in the rg-plane. The performance of
the proposed classifier is evaluated and compared with other classifiers. Finally, conclusions are drawn.
1 INTRODUCTION
We propose a skin colour classifier named the
Linear Container (LC) classifier. The classifier uses
four decision planes in order to confine a volume of
the RGB space where skin colours are likely to
appear. The features of the LC classifier are: capable
of being tuned to a particular skin tonality; rapid
evaluation; minimal storage requirements; and
resistance to illumination (brightness) changes
equivalent to that of classifiers that work in
normalised RGB. The classifier requires a tuning
stage in which a single image, with marked skin and
background areas, is analysed resulting in a new
linear container configuration. The classifier is
originally intended to detect skin colour in tracking
applications, such as the ones found in Human
Computer Interaction (HCI) systems; however, other
uses are conceivable.
The paper is organized as follows: Section 2
outlines previous work on skin colour detection, and
situates the LC classifier in relation to other works;
Section 3 introduces the LC classifier, and describes
its tuning procedure; Section 4 presents performance
results; Section 5 shows the behaviour of the LC
classifier when tuned at various resolutions; Section
6 studies some HCI usability factors; Finally,
Section 7 gives some conclusions and directions for
future work.
2 PREVIOUS WORK ON SKIN
COLOUR DETECTION
Skin colour provides an important source of
information for computer vision systems that
monitor people. The skin colour cue is widely used
in face detection and recognition systems, various
types of surveillance, vision-based biometric
systems, and vision-based HCI systems. All these
areas of application use skin colour to track, locate
and interpret people, with relatively efficient, fast,
low-level, methods.
The goal of skin colour detection is to build a
decision rule that can discriminate between the skin
and non-skin colour pixels of an image. Because of
the importance of skin colour detection there have
been numerous approaches to solve this task. The
various approaches can be grouped into the
following four categories: non-parametric skin
distribution modelling, parametric skin distribution
modelling, explicitly defined skin region modelling,
and dynamic skin colour modelling (Vezhnevets et
al., 2003).
Non-parametric skin distribution modelling uses
training data to estimate a skin colour distribution.
This estimation process is sometimes referred to as
the construction of a Skin Probability Map (SPM)
(Jones and Rehg, 1999; Brand and Mason, 2000;
Gomez, 2002) assigning a probability value to each
3
Tosas M. and Mills S. (2007).
FAST ADAPTABLE SKIN COLOUR DETECTION IN RGB SPACE.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications, pages 3-10
DOI: 10.5220/0002055800030010
Copyright
c
SciTePress

point of a discretised colour space. A SPM can be
implemented by a colour histogram, and such
approaches normally use the chrominance plane of
some colour space in order to offer resistance to
illumination changes (Chen et al., 1995; Schumeyer
and Barner, 1998; Jones and Regh, 1999; Zarit et al.,
1999). SPMs can use a Bayes classification rule in
order to improve their performance, in this case two
colour histograms are required; one for the
probability of skin colour, and another for the
probability of non-skin colour (Jones and Regh,
1999; Zarit et al., 1999; Chai and Bouzerdoum,
2000). The main disadvantages of SPMs are the high
storage requirements and the fact that their
performance directly depends on the
representativeness of the training images.
Parametric skin distribution modelling can
represent skin colour in a more compact form.
Common examples of parametric modelling model a
skin colour distribution using a single Gaussian
(Ahlberg, 1999; Menser and Wien, 2000; Terrillon
et al., 2000) or a mixture of Gaussians (Jones and
Regh, 1999; Yang and Ahuja, 1999; Terrillon et al.,
2000). Expectation Maximization (EM) algorithms
are used on training data to find the model
parameters that produce the best fit. The goodness of
fit, and therefore the performance of the model,
depends on the shape of the chosen model and the
chosen colour space. This performance dependency
with the colour space is stronger in the case of
parametric modelling than it is in the case of non-
parametric modelling (Brand and Mason, 2000; Lee
and Yoo, 2002).
Another way to build a skin colour classifier is to
define explicitly, through a number of rules, the
boundaries of a skin cluster in some colour space;
this is called explicitly defined region modelling.
The obvious advantage of this method is its
computational simplicity, which has attracted many
researchers (Fleck et al., 1996; Ahlberg, 1999; Jorda
et al., 1999; Peer et al., 2003), as it leads to the
construction of a very rapid classifier. However in
order to achieve high recognition rates both a
suitable colour space and adequate decision rules
need to be found empirically. Gomez and Morales
(2002) proposed a method that can build a set of
rules automatically by using machine learning
algorithms on training data. They reported results
comparable to the Bayes SPM classifier in RGB
space for their data set.
Finally, we have dynamic skin colour modelling.
This category of skin modelling methods is designed
for skin detection during tracking. Skin detection in
this category is different from static image analysis
in a number of aspects. First, in principle, the skin
models in this category can be less general – i.e
tuned for a specific person, camera, or lighting.
Second, an initialisation stage is possible, when the
skin region of interest is segmented from the
background by a different classifier or manually; this
makes possible to obtain a skin classification model
that is optimal for the given conditions. Finally, this
category of skin models can be able to update
themselves in order to match changes in lighting
conditions. Some of the methods in this category use
Gaussian distribution adaptation (Yang and Ahuja,
1998), or dynamic histograms (Soriano et al., 2000;
Stern and Efros, 2002). In (Soriano et al., 2000) a
skin locus, in rg space, is constructed beforehand
from training data. Then, during tracking, their
dynamic skin colour histogram is updated with
pixels from the bounding box of the target, provided
these pixels belong to the skin locus. This makes the
dynamic histogram less likely to adapt to colour
distributions other than that of skin.
The proposed LC classifier belongs to the last
two categories. The classifier is implemented using
rules similar to the rules of the explicitly defined
skin region models; however, these rules are
parameterised in order that they can be tuned to
specific conditions, during an initialisation stage.
The parameters of the LC classifier can also be
recalculated rapidly in order to adapt to changing
illumination conditions.
3 LINEAR CONTAINER
CLASSIFIER
Normalised RGB is a popular colourspace because
of its simple normalisation procedure, and its
diminished dependence with brightness (Yang and
Ahuja, 1998; Zarit et al., 1999; Lee and Yoo, 2002;
Stern and Efros, 2002; Peer et al., 2003). The
projection from RGB (3D space) to normalised RGB
(2D space) corresponds with a cone in the original
3D RGB space, in that each point in the rg-plane
corresponds to a 3D line of colour values in the
original RGB space. These lines meet at (0, 0, 0),
and points along the lines correspond to scaling of
white illumination. Therefore, a skin colour cluster
in the rg-plane corresponds to a cone-like cluster in
RGB space. This is illustrated in Figure 1.
The proposed LC classifier uses a polyhedral
cone, constructed from four decision planes, in order
to model the cone-like region in RGB space that
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
4
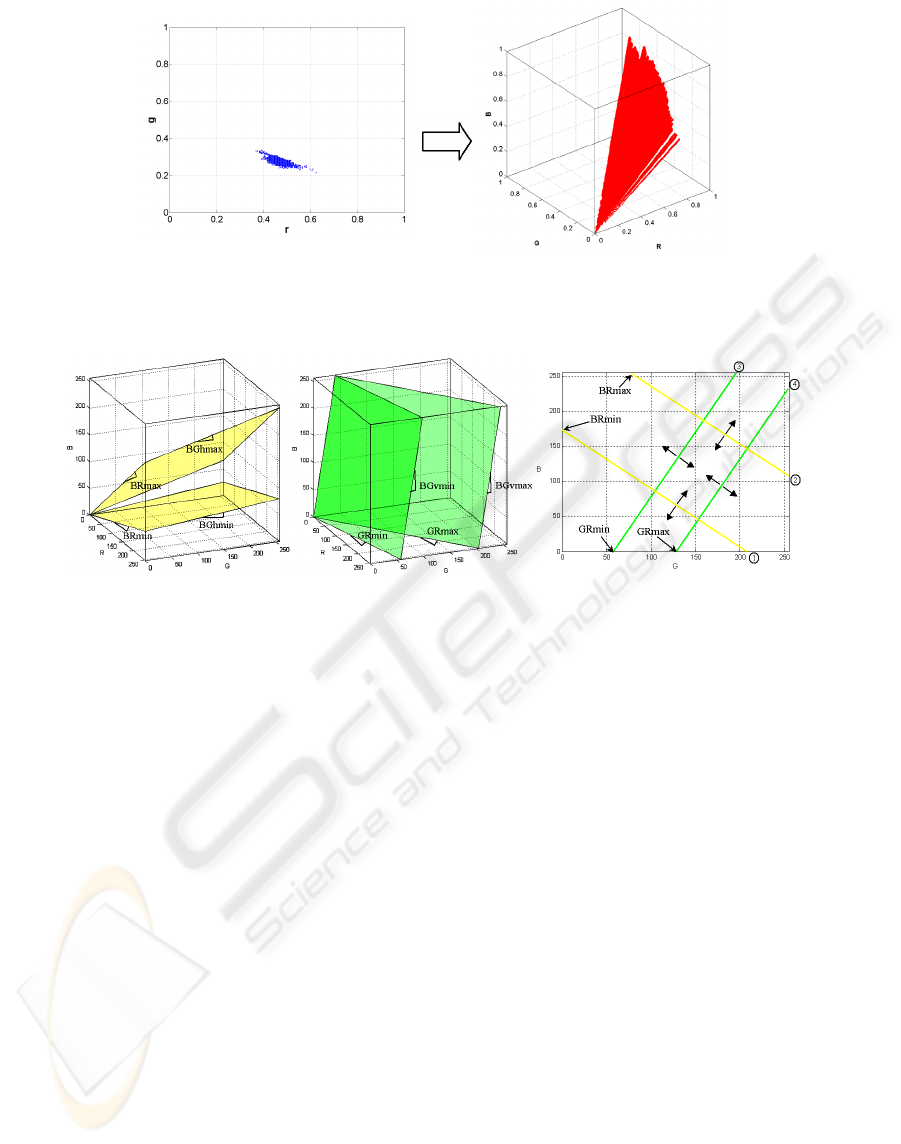
(a)
(b)
Figure 1: (a) Skin colour cluster, in the rg-plane, from a single sample. (b) The rg-plane skin colour cluster projected to
RGB space; each point in the rg-plane becomes a line in RGB space.
Figure 2: (a) Horizontal decision planes. (b) Vertical decision planes. (c) Tuning heuristic.
results from the projection of a skin colour cluster in
the rg-plane to the RGB space. The LC classifier
performs pixel-based segmentation. If an RGB value
is inside the polyhedral cone volume, it is classified
as skin; if the RGB value is outside the polyhedral
cone volume then it is classified as non-skin. The
definition of the four decision planes is:
B
Ghmin G BRmin R B BGhmax G BRmax R⋅+ ⋅< < ⋅+ ⋅
(1)
where BGhmin and BRmin parameterise the lower
"horizontal" plane, and BGhmax and BRmax
parameterise the higher horizontal plane. The
horizontal planes are illustrated in Figure 2(a). These
two planes confine a volume between them by
constraining the values that B can take in relation to
R and G. This volume is further constrained by two
"vertical" planes:
B
Gvmin B GRmin R G BGvmax B GRmax R⋅+ ⋅< < ⋅+ ⋅
(2)
where BGvmin and GRmin parameterise the left
vertical plane, and BGvmax and GRmax
parameterise the right vertical plane. The vertical
planes confine a volume between them by
constraining the values that G can take in relation to
R and B. The vertical planes are illustrated in
Figure2(b). As the RGB values that are close to the
origin carry too little colour information, we truncate
the apex of the polyhedral cone with one additional
rule:
R
min R
<
. If a colour value satisfies these three
rules, then it is inside the polyhedral cone, and
therefore classified as skin colour.
The LC classifier can be tuned for a specific
person, camera, or lighting conditions, in an
initialisation step. For this, an initialisation image is
needed. This initialisation image is composed of two
approximately complementary masks; one mask
delimits the target skin colour area, we call this
mask SkinMask; and the other mask comprises areas
where we do not expect to find skin colour, we call
this mask BackgroundMask. Figure 3 shows an
initialisation image segmented by the two masks.
The BackgroundMask can be tailored in order to
avoid areas of skin colour in addition to those
included in SkinMask, for example, Figure 3(b)
avoids the subject's wrist. The two masks can be
generated manually, or automatically by a tracking
system such as (Tosas and Li, 2007).
The tuning procedure uses a heuristic method by
which the parameters of the decision planes are
changed in sequence.
(a)
(b)
(c)
FAST ADAPTABLE SKIN COLOUR DETECTION IN RGB SPACE
5

(a) (b)
Figure 3: Initialisation image segmented by SkinMask (a)
and BackgroundMask (b).
Each time a parameter is changed, the fitness of the
LC classifier, to the detection of skin colour in the
SkinMask and to the rejection of skin colour in the
BackgroundMask, is measured using the following
equation:
# #
s
kin in SkinMask skin in BackgroundMask
fitness TI
s
ize of SkinMask size of BackgroundMask
=×−
(3)
where TI (Target Importance) is used to control the
importance of the target skin colour area in the
fitness. In the experiments of the following sections
TI = 2 so as to give double importance to detecting
skin on the SkinMask than to avoid detecting skin on
the BackgroundMask. This parameter allows the
classifier to be tuned to favour true positives or
negatives.
The heuristic search, by which the parameters of
the decision planes are changed, is illustrated in
Figure 2(c). This figure shows a section view of the
RGB cube, corresponding to the B-G-plane with
maximum R. Lines 1, 2, 3 and 4 are the intersections
of the four decision planes with the section view.
Starting from some priori values, the search varies
BRmin, then BRmax, GRmin, and finally GRmax;
first, reducing their values, then increasing their
values, and measuring the fitness (Equation 3) at
each step. The values that produce the best fitness
are finally selected. Note that the slope of the
decision planes remains unchanged in this heuristic.
4 PERFORMANCE RESULTS
The LC classifier is tested on video sequences of
subjects with four different skin tonalities:
Mediterranean, white Caucasian, black African, and
Chinese. The target skin colour area is the subject's
hand. The subjects hold their hand open in front of
the camera, and move the hand towards and away
from the camera. An overhead lamp affects the
illumination of the subjects' hand. When the
subject's hand is closer to the camera, the hand is
under a shadow and looks darker. When the subject's
hand is further away from the camera, the hand is
under the lamp and looks brighter. The classifier is
initialised once, at the beginning of each video
sequence.
The skin colour detection performance is
calculated for each video sequence, using a ground
truth. The ground truth consists of two masks, which
have been manually generated for every fifth frame
of the four video sequences. The ground truth
considers the subject's hand as the target area for
skin colour detection. This area is segmented using
the SkinTruth mask, Figure4(b). The background is
segmented using the BackgroundTruth mask, Figure
4(c). Note that the BackgroundTruth mask is not the
complement of the SkinTruth mask. The
BackgroundTruth mask avoids the target skin colour
area, the subject's hand, and any other skin colour
areas in the image; therefore, for each measurement
frame, there will be some areas which will not take
part in the counting; these areas correspond to the
subject's face and arms. Both masks are tested for
skin colour. Skin colour pixels found in the
SkinTruth mask constitute true-positives. Non-skin
colour pixels found in the BackgroundTruth mask
constitute true-negatives. In order to compare
detection results between frames the true-positives
and true-negatives are normalised to the size of
SkinTruth and BackgroundTruth masks respectively.
Normalised true-positives are referred to as NTN,
and normalised true-negatives are referred to as
NTP.
Figure 4: (a) Original frame. (b) SkinTruth mask. (c)
BackgroundTruth mask.
We use an rg skin colour histogram classifier as a
comparison reference with the LC classifier. The rg
histogram used for comparison is constructed in an
initialisation step at the beginning of each sequence
from the pixels in SkinMask and its size is 64x64
bins. A pixel is classified as skin colour if its
corresponding bin in the rg histogram is bigger than
a threshold.
The choice of the threshold affects the detection rate
of the rg histogram. In general, if the threshold
increases, NTN tends to be higher, but NTP tends to
be lower; if the threshold decreases, NTP tends to be
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
6
higher, but NTN tends to be lower. For the tested
video sequences a threshold of 25 produced the best
results.
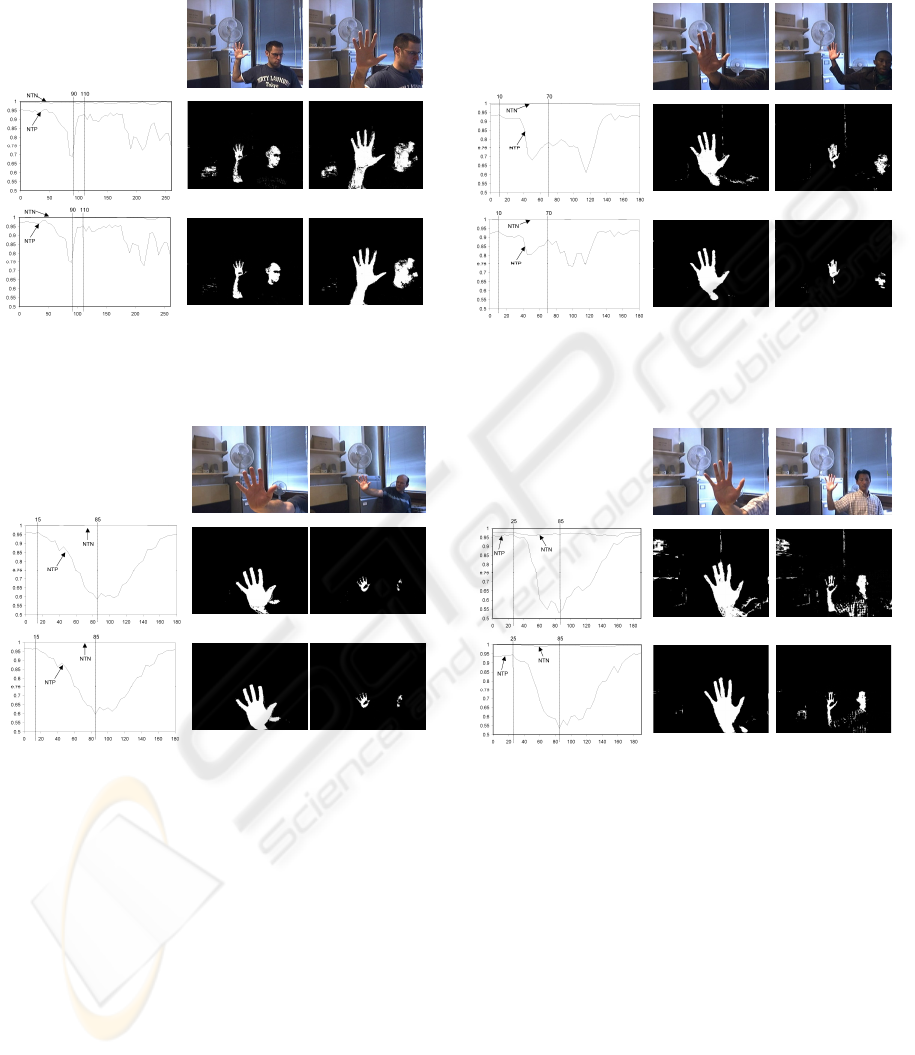
Frame 90
Frame 110
Figure 5: Mediterranean subject test. Top row: Original
frames. Middle row: rg histogram classifier. Bottom row:
LC classifier.
Frame 15
Frame 85
Figure 7: White Caucasian subject test. Top row: Original
frames. Middle row: rg histogram classifier. Bottom row:
LC classifier.
Figure 5 shows the results for the Mediterranean
subject. The figure presents plots of the NTP and
NTN against the frame number, and two example
frames showing the skin colour classification for a
best detection case and a worst detection case. The
top row shows the original frames before detecting
the skin colour areas. The middle row corresponds to
the rg histogram, and the bottom row corresponds to
the LC classifier. The results of both classifiers are
similar, but the LC classifier consistently exhibits
slightly larger NTP and NTN than the rg histogram
classifier, all along the video sequence. Following
the same format as Figure 5, Figures 6, 7 and 8 show
the results for the other three ethnic skin tonalities.
In all cases, the LC classifier exhibited the same or
larger NTP and NTN than the rg histogram
classifier.
Frame 10
Frame 70
Figure 6: Black African subject test. Top row: Original
frames. Middle row: rg histogram classifier. Bottom row:
LC classifier.
Frame 25
Frame 85
Figure 8: Chinese subject test. Top row: Original frames.
Middle row: rg histogram classifier. Bottom row: LC
classifier.
Videos showing the skin colour detection tests are
available at:
www.cs.nott.ac.uk/~mtb/
research/SkinColour.html
An experiment comparing the computational speed
of the LC classifier, against other classifiers, was
also carried out. The experiment consists in
measuring the time it takes for a classifier to check
all the pixels in a 640x480 frame. The experiment
is repeated for 100 frames of a video sequence
containing skin colour regions, and the times used in
each frame are averaged.
FAST ADAPTABLE SKIN COLOUR DETECTION IN RGB SPACE
7

Table 1: Execution time results.
Average time per frame
Speed-up of the RGB LC classifier with
respect to the other classifiers
RGB LC classifier 0.0090 secs
rg LC classifier 0.0147 secs x1.62
rg LC classifier with lookup table 0.0107 secs x1.17
rg histogram 0.0235 secs x2.59
rg histogram with lookup table 0.0204 secs x2.25
bare RGB histogram 0.0022 secs x0.24
The experiment was carried out in an AMD Athlon
3500+, 1GB of RAM. The results are shown in
Table 1.
The RGB LC classifier uses an extra rule to
avoid dark pixels, the other classifiers do not use this
rule. The rg LC classifier is the 2D equivalent to the
proposed RGB LC classifier. It works in the rg-plane
by using 4 decision lines instead of 4 decision
planes. The skin detection performance of this
classifier is equivalent to the RGB LC classifier. The
equations in the rg LC classifier are simpler than
those of the RGB LC classifier; however, the former
is slower because it has to normalise each pixel from
RGB to rg. The use of lookup table containing all
the possible normalisations can speed up the
normalisation procedure. But, even when using a
lookup table, the RGB LC classifier is x1.172126
times faster than its rg LC equivalent. And the rg LC
classifier is faster than the rg histogram classifier
(both with and without lookup table).
A bare RGB histogram classifier is used as a
comparison measure for the fastest skin colour
classifier (yet the most sensitive to changes in
illumination), being x4.16 times faster than the LC
classifier. However, in practice, the reduced storage
requirements of the LC classifier may result, when
plugging it into certain algorithms, in faster
execution times due to its better locality of
reference. This is illustrated in a practical
application of the LC skin colour classifier. The LC
classifier is used in the measurement function of the
particle-filter based hand contour tracking algorithm
described in (Tosas and Li, 2007). In such a tracking
algorithm, most of the computation is expended in
the measurement function (profiling shows that
more than 60% of the application's time is spent in
the measurement function). The average time spent
in the processing of a tracking time-step is
calculated as the average of the times spent in each
of 100 time-steps of tracking. When exchanging the
LC classifier for a 32x32x32 bins RGB histogram
(in the same machine as the previous experiment)
the speed up in the processing of a time-step is only
x1.2 times faster (as opposed to the x4.16 times
faster suggested in the previous experiment).
5 TUNING AT VARIOUS
RESOLUTIONS
So far, the LC classifier has been tuned using an
initialisation image of the same size as the video
sequence in which it was tested, 640x480 pixels. It
was observed that the tuning of the LC classifier on
a decimated version of the initialisation image,
results in little degradation of the classifier's
detection performance on the non-decimated video
sequence. This is because the result of the tuning is
more dependent upon the range of colours of the
pixels in the initialisation masks than upon the
number of pixels. This fact allows us to speed-up the
tuning procedure, because the amount of data to be
dealt with is reduced. The speed-up of the tuning
procedure as a result of using a decimated
initialisation image instead of using a non-decimated
initialisation image is: x4 for a 320x240 resolution,
x16 for 160x120, x64 for 80x60, x256 for 40x30,
and x1024 for a 20x15 resolution. Figure 9 shows
the NTP of the LC classifier, on the video sequence
of the Mediterranean subject, for various resolutions
Figure 9: NTP when tuning at various resolutions.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
8
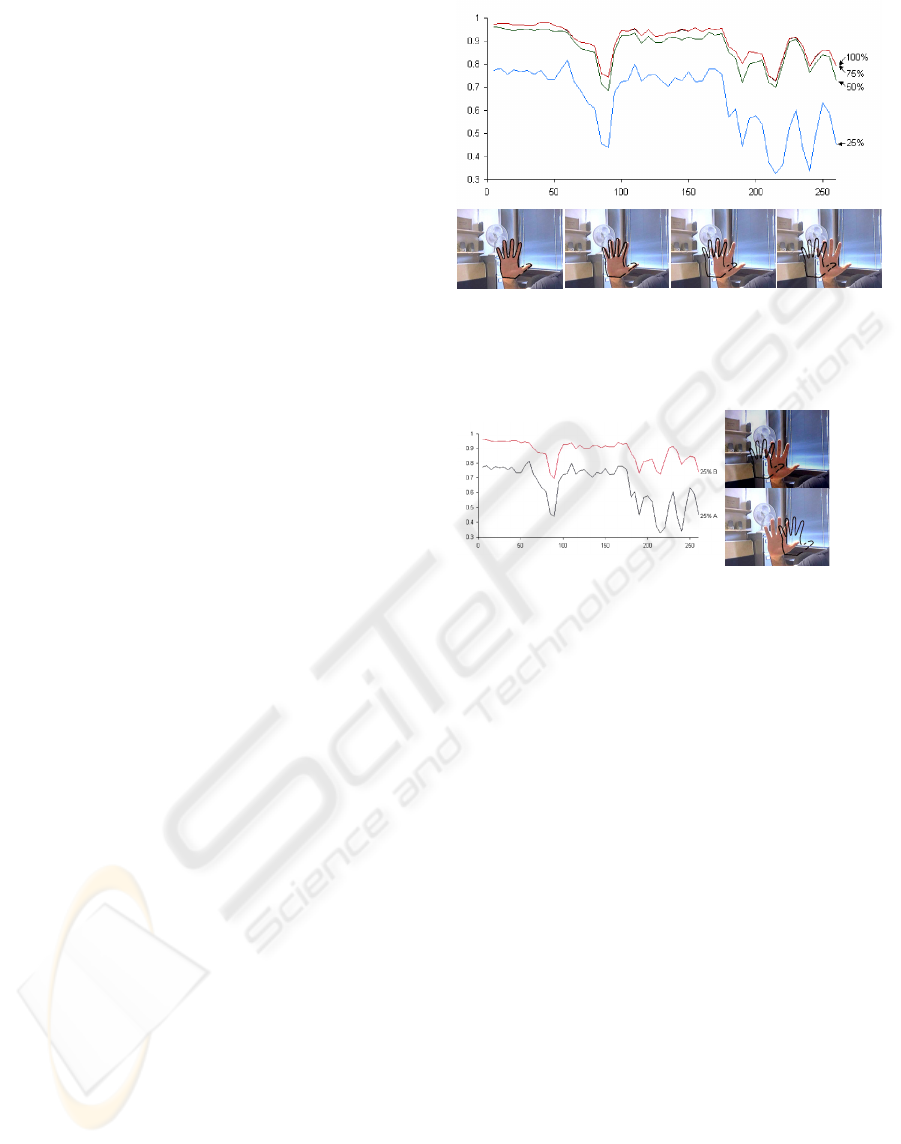
of the initialisation image. The NTN are not shown
as they remain at almost 1 for the six resolutions.
Notice that the NTP for an initialisation image of
320x240 is virtually the same as the NTP for an
initialisation image of 640x240.
The speed-up resulting from the use of
decimated initialisation images becomes very
important in HCI applications because it allows the
tuning (and potentially periodical retuning) of the
LC classifier with only a small impact in the HCI
system responsiveness.
6 HCI USABILITY FACTORS
The tuning stage in the experiments of the previous
sections was idealised, in that no background
colours appear in the SkinMask, and no skin colour
appeared in BackgroundMask. If the LC classifier is
used in a HCI system, which could generate the
initialisation masks automatically from a tracking
subsystem, it is possible that background appears in
SkinMask, and skin colour appears in
BackgroundMask. In this section we study the
robustness of the LC classifier against non-ideal
tuning conditions.
The detection performance of the LC classifier is
calculated, once more, for the video sequence of the
Mediterranean subject. This time, the tuning is
repeated for a misaligned SkinMask and
BackgroundMask. In each repetition SkinMask only
contains a percentage of the target's skin colour area.
The skin that is not in the SkinMask is in the
BackgroundMask, this affects the final configuration
of the LC parameters found during the tuning stage.
Figure 10 shows the NTP for four percentages of
skin colour in SkinMask. The NTN is not shown as
it is almost unaffected in all the four cases. We can
see that the degradation in NTP for a 50% skin in
SkinMask is small; and even when the amount of
skin in SkinMask is as small as 25%, the NTP along
the whole sequence may still be useful for some
applications. However, the model parameters found
during the tuning stage, depend on the colours
appearing in each initialisation mask; hence,
different results are possible even when SkinMask
contains the same amount of skin. This is illustrated
in Figure 11, where the tuning of the LC classifier
using two SkinMasks with the same percentage of
skin inside the mask, produce different detection
performances.
(a)
(b)
(c)
(d)
Figure 10: Chart, NTP for four percentages of skin in
SkinMask. (a) SkinMask containing 100% skin, (b) 75%
skin, (c) 50% skin, and (d) 25% skin.
25%A
25%B
Figure 11: NTP for two SkinMask containing 25% skin
colour.
7 CONCLUSIONS
We have presented the Linear Container (LC) skin
colour classifier. This classifier constitutes a
contribution to dynamic skin colour modelling
methods. Its detection performance compares well
with an rg histogram classifier, resulting in equal or
better detection rates, when using a single training
image. Two remarkable qualities of this classifier
are its evaluation speed, and its low storage
requirements. The four rules that define the decision
planes, and an extra rule to avoid dark pixels, can be
rapidly evaluated, resulting in a x2.24 speed-up with
respect to a simple rg histogram classifier. In
practice, the reduced storage requirements of the LC
classifier may result, when plugging it into certain
algorithms, in even faster execution times due to its
better locality of reference. This can prove to be an
advantage in embedded systems. On the other hand,
despite the LC classifier operates in the RGB space,
its resistance to illumination changes is equivalent to
that of a classifier that operates in the rg-plane. The
detection performance of the LC classifier is not
greatly impaired when the tuning is performed in a
decimated initialisation image, but the execution
FAST ADAPTABLE SKIN COLOUR DETECTION IN RGB SPACE
9

time of the tuning is notably reduced. The LC
classifier also proved to be robust to non-ideal
initialisations, in which skin colour appears in
BackgroundMask, and background appears in
SkinMask.
A subject of further work is the tuning stage.
Different heuristics or maximisation procedures
could produce better detection results. On the other
hand, the LC model itself could be changed. Linear
containers are fast to evaluate, but other type of
containers, could produce a better fit of the skin
colour cluster through scaling of white illumination.
Sets of rules such as the ones proposed in (Gomez
and Morales, 2002) could give better detection
results, although a tuning procedure for these rules
may be more complex.
REFERENCES
Ahlberg, J., 1999. A system for face localization and facial
feature extraction. Tech. Rep. LiTH-ISY-R-2172,
Linkoping University.
Brand, J. and Mason, J., 2000. A comparative assessment
of three approaches to pixel level human skin-
detection. In Proc. of the ICPR, vol. 1, 1056-1059.
Chai, D., And Bouzerdoum, A., 2000. A Bayesian
approach to skin color classification in ycbcr color
space. In Proc. of IEEE Region Ten Conference
(TENCON’2000), vol. 2, 421-424.
Chen, Q., Wu, H., and Yachida, M., 1995. Face detection
by fuzzy pattern matching. In Proc. of the ICCV, 591-
597.
Fleck, M., Forsyth, D. A., and Bregler, C., 1996. Finding
naked people. In Proc. of the ECCV, vol. 2, 592-602.
Gomez, G., 2002. On selecting colour components for skin
detection. In Proc. of the ICPR, vol. 2, 961-964.
Gomez, G., and Morales, E., 2002. Automatic feature
construction and a simple rule induction algorithm for
skin detection. In Proc. of the ICML Workshop on
Machine Learning in Computer Vision, 31-38.
Jones, M. J. and Rehg, J. M., 1999. Statistical color
models with application to skin detection. In Proc. of
the CVPR ’99, vol. 1, 274-280.
Jorda, L., Perrone, M., Costeira, J., and Santos-Victor, J.,
1999. Active face and feature tracking. In Proc. of the
10
th
International Conference on Image Analysis and
Processing, 572-577.
Lee, J. Y., and Yoo, S. I., 2002. An elliptical boundary
model for skin color detection. In Proc. of the 2002
International Conference on Imaging Science,
Systems, and Technology.
Menser, B., and Wien, M., 2000. Segmentation and
tracking of facial regions in color image sequences. In
Proc. Visual Communications and Image Processing,
SPIE, 731-740.
Peer, P., Kovac, J., and Solina, F., 2003. Human skin
colour clustering for face detection. In International
Conference on Computer as a Tool, EUROCON, The
IEEE region 8, vol 2, 144-148.
Vezhnevets, V., Sazonov V., Andreeva A., 2003. A
Survey on Pixel-Based Skin Color Detection
Techniques. In Proc. Graphicon, pp. 85-92, Moscow,
Russia.
Schumeyer, R., And Barner, K., 1998. A color-based
classifier for region identification in video. In
Proc.Visual Communications and Image Processing,
SPIE, vol 3309, 189-200.
Soriano, M., Martinkauppi, B., Huovinen, S., and
Laaksonen, M., 2000. Using the skin locus to cope
with changing illumination conditions in color-based
face tracking. In Proc. of the IEEE Nordic Signal
Processing Symposium, pp. 383-386.
Stern, H., and Efros, B., 2002. Adaptive color space
switching for face tracking in multi-colored lighting
environments. In Proc. of the International
Conference on Automatic Face and Gesture
Recognition, 249-255.
Terrillon, J. C., Shirazi, M. N., Fukamachi, H., and
Akamatsu, S., 2000. Comparative performance of
different skin chrominance models and chrominance
spaces for the automatic detection of human faces in
color images. In Proc. of the International Conference
on Face and Gesture Recognition, 54-61.
Tosas, M., and Li, B., 2007. Tracking Tree-Structured
Articulated Objects Using Particle Interpolation.
Accepted for publication in the proceedings of
CGIM2007.
Yang, M., and Ahuja, N., 1998. Detecting human faces in
color images. In Proc. of ICIP, vol. 1, 127-130.
Yang, M. H., and Ahuja, N., 1999. Gaussian mixture
model for human skin color and its applications in
image and video databases. In Proc. of the SPIE:
Conf. On Storage and Retrieval for Image and Video
Databases, vol. 3656, 458-466.
Zarit, B. D., Super, B. J. and Quek, F. K. H., 1999.
Comparison of five color models in skin pixel
classification. In ICCV’99 Int’l Workshop on
recognition, analysis and tracking of faces and
gestures in Real-Time systems, 58- 63.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
10
