
HUMAN EYE LOCALIZATION USING EDGE PROJECTIONS
Mehmet T¨urkan
Dept. of Electrical and Electronics Engineering, Bilkent University, Bilkent, 06800 Ankara, Turkey
Montse Pard`as
Dept. of Signal Theory and Communications, Technical University of Catalonia, 08034 Barcelona, Spain
A. Enis C¸ etin
Dept. of Electrical and Electronics Engineering, Bilkent University, Bilkent, 06800 Ankara, Turkey
Keywords:
Eye localization, eye detection, face detection, wavelet transform, edge projections, support vector machines.
Abstract:
In this paper, a human eye localization algorithm in images and video is presented for faces with frontal
pose and upright orientation. A given face region is filtered by a high-pass filter of a wavelet transform. In
this way, edges of the region are highlighted, and a caricature-like representation is obtained. After analyzing
horizontal projections and profiles of edge regions in the high-pass filtered image, the candidate points for each
eye are detected. All the candidate points are then classified using a support vector machine based classifier.
Locations of each eye are estimated according to the most probable ones among the candidate points. It is
experimentally observed that our eye localization method provides promising results for both image and video
processing applications.
1 INTRODUCTION
The problem of human eye detection, localization,
and tracking has received significant attention dur-
ing the past several years because of wide range of
human-computer interaction and surveillance appli-
cations. As eyes are one of the most important salient
features of a human face, detecting and localizing
them helps researchers working on face detection,
face recognition, iris recognition, facial expression
analysis, etc.
In recent years, many heuristic and pattern recog-
nition based methods have been proposed to detect
and localize eyes in still images and video. Most
of these methods described in the literature ranging
from very simple algorithms to composite high-level
approaches are highly associated with face detection
and face recognition. Traditional image-based eye de-
tection methods assume that the eyes appear different
from the rest of the face both in shape and intensity.
Dark pupil, white sclera, circular iris, eye corners, eye
shape, etc. are specific properties of an eye to distin-
guish it from other objects (Zhu and Ji, 2005). (Mori-
moto and Mimica, 2005) reviewed the state of the art
of eye gaze trackers by comparing the strengths, and
weaknesses of the alternatives available today. They
also improved the usability of several remote eye gaze
tracking techniques. (Zhou and Geng, 2004) defined
a method for detecting eyes with projection functions.
After localizing the rough eye positions using (Wu
and Zhou, 2003) method, they expand a rectangular
area near each rough position. Special cases of gener-
alized projection function (GPF) are used to localize
the cental positions of eyes in eye windows.
Recently, wavelet domain (Daubechies, 1990;
Mallat, 1989) feature extraction methods have been
developedand become very popular (Garcia and Tzir-
itas, 1999; Zhu et al., 2000; Viola and Jones, 2001;
Huang and Mariani, 2000) for face and eye detec-
tion. (Zhu et al., 2000) described a subspace approach
to capture local discriminative features in the space-
frequency domain for fast face detection based on
orthonormal wavelet packet analysis. They demon-
strated the detail (high frequency sub-band) infor-
mation within local facial areas contain information
about eyes, nose and mouth, which exhibit notice-
able discrimination ability for face detection problem.
This assumption may also be used to detect and local-
ize facial areas such as eyes. (Huang and Mariani,
2000) described a method to represent eye images us-
ing wavelets. Their algorithm uses a structural model
to characterize the geometric pattern of facial compo-
410
Türkan M., Pardàs M. and Enis Çetin A. (2007).
HUMAN EYE LOCALIZATION USING EDGE PROJECTIONS.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications - IFP/IA, pages 410-415
Copyright
c
SciTePress

nents, i.e., eyes, nose, and mouth, using multiscale fil-
ters. They perform eyes detection using a neural net-
work classifier. (Cristinacce et al., 2004) developed
a multi-stage approach to detect features on a human
face, including the eyes. After applying a face detec-
tor to find the approximate location of the face in the
image, they extract and combine features using Pair-
wise Reinforcement of Feature Responses (PRFR) al-
gorithm. The estimated features are then refined using
a version of the Active Appearance Model (AMM)
search which is based on edge and corner features.
In this study, a human eye localization method in
images and video is proposed with the assumption
that a human face region in a given still image or
video frame is already detected by means of a face de-
tector. This method is basically based on the idea that
eyes can be detected and localized from edges of a
typical human face. In fact, a caricaturist draws a face
image in a few strokes by drawing the major edges,
such as eyes, nose, mouth, etc., of the face. Most
wavelet domain image classification methods are also
based on this fact because significant wavelet coeffi-
cients are closely related with edges (Mallat, 1989;
Cetin and Ansari, 1994; Garcia and Tziritas, 1999).
The proposed algorithm works with edge projec-
tions of given face images. After an approximate hor-
izontal level detection, each eye is first localized hor-
izontally using horizontal projections of associated
edge regions. Then, horizontal edge profiles are cal-
culated on the estimated horizontal levels. Eye can-
didate points are determined by pairing up the local
maximum point locations in the horizontal profiles
with the associated horizontal levels. After obtain-
ing the eye candidate points, verification is carried out
by a support vector machine based classifier. The lo-
cations of eyes are finally estimated according to the
most probable point for each eye separately.
This paper is organized as follows. Section 2 de-
scribes our eye localization algorithm where each step
is briefly explained for the techniques used in the im-
plementation. In Section 3, experimental results of
the proposed algorithm are presented and the detec-
tion performanceis comparedwith currently available
eye localization methods. Conclusions are given in
Section 4.
2 EYE LOCALIZATION SYSTEM
In this paper, a human eye localization scheme for
faces with frontal pose and upright orientation is de-
veloped. After detecting a human face in a given color
image or video frame using edge projections method
proposed by (Turkan et al., 2006), the face region is
decomposed into its wavelet domain sub-images. The
detail information within local facial areas, e.g., eyes,
nose, and mouth, is obtained in low-high, high-low,
and high-high sub-images of the face pattern. A brief
review of the face detection algorithm is described in
Section 2.1, and the wavelet domain processing is pre-
sented in Section 2.2. After analyzing horizontal pro-
jections and profiles of horizontal-crop and vertical-
crop edge images, the candidate points for each eye
are detected as explained in Section 2.3. All the can-
didate points are then classified using a support vec-
tor machine based classifier. Finally, the locations of
each eye are estimated according to the most probable
ones among the candidate points.
2.1 Face Detection Algorithm
After determining all possible face candidate regions
using color information in a given still image or video
frame, a single-stage 2-D rectangular wavelet trans-
form of each region is computed. In this way, wavelet
domain sub-images are obtained. The low-high and
high-low sub-images contain horizontal and vertical
edges of the region, respectively. The high-high sub-
image may contain almost all the edges, if the face
candidate region is sharp enough. It is clear that
the detail information within local facial areas, e.g.,
edges due to eyes, nose, and mouth, show noticeable
discrimination ability for face detection problem of
frontal view faces. (Turkan et al., 2006) take advan-
tage of this fact by characterizing these sub-images
using their projections and obtain 1-D projection fea-
ture vectors corresponding to edge images of face or
face-like regions. Horizontal projection H[.], and ver-
tical projectionV[.] are simply computed by summing
pixel values, d[., .], in a row and column, respectively:
H[y] =
∑
x
|d[x, y]| (1)
and
V[x] =
∑
y
|d[x, y]| (2)
where d[x, y] is the sum of the absolute values of the
three high-band sub-images.
Furthermore, Haar filter-like projections are com-
puted as in (Viola and Jones, 2001) approach as ad-
ditional feature vectors which are obtained from dif-
ferences of two sub-regions in the candidate region.
The final feature vector for a face candidate region is
obtained by concatenating all the horizontal, vertical,
and filter-like projections. These feature vectors are
then classified using a support vector machine (SVM)
based classifier into face or non-face classes.
As wavelet domain processing is used both for
face and eye detection, it is described in more detail
in the next subsection.
2.2 Wavelet Decomposition of Face
Patterns
A given face region is processed using a 2-D filter-
bank. The region is first processed row-wise using a
1-D Lagrange filterbank (Kim et al., 1992) with a low-
pass and high-pass filter pair, h[n] = {0.25, 0.5, 0.25}
and g[n] = {−0.25, 0.5, −0.25}, respectively. Re-
sulting two image signals are processed column-wise
once again using the same filterbank. The high-band
sub-images that are obtained using a high-pass fil-
ter contain edge information, e.g., the low-high and
high-low sub-images contain horizontal and vertical
edges of the input image, respectively (Fig. 1). The
absolute values of low-high, high-low and high-high
sub-images can be summed up to have an image hav-
ing significant edges of the face region.
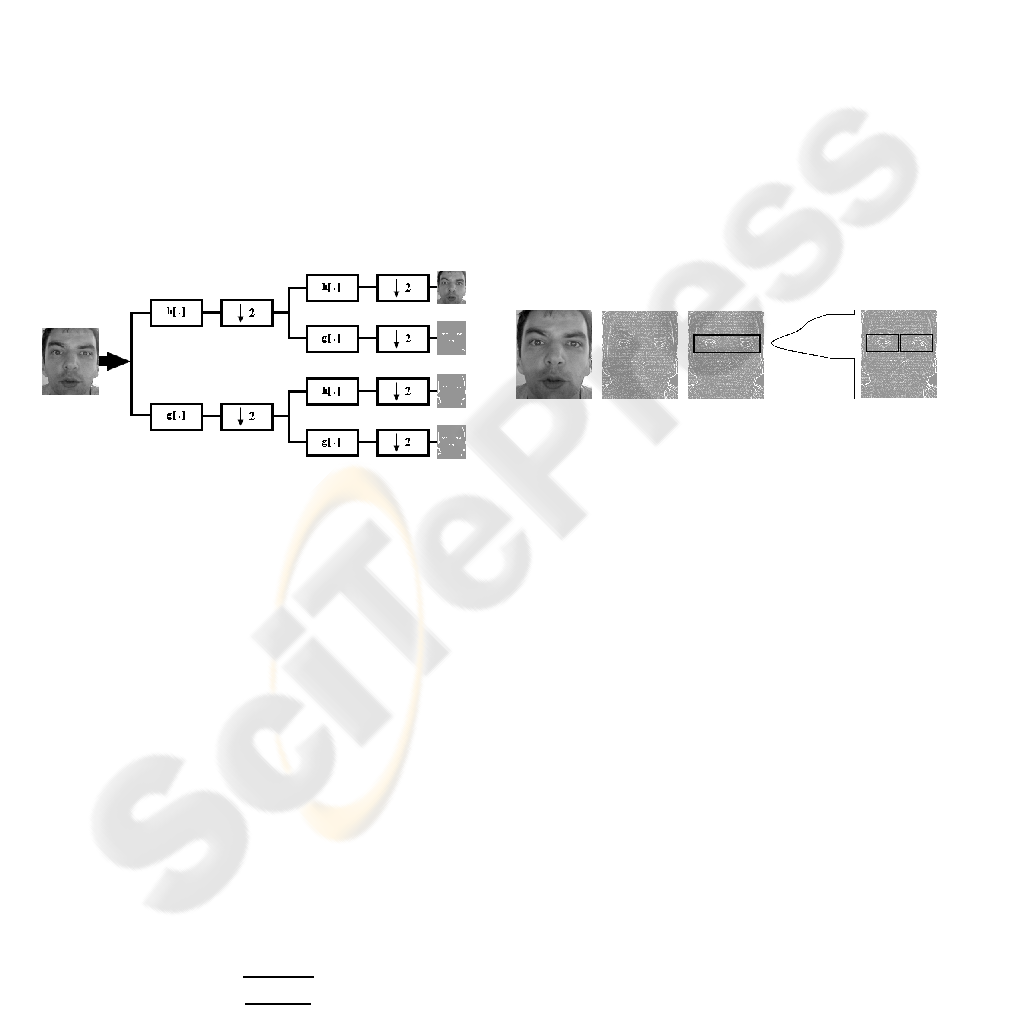
Figure 1: Two-dimensional rectangular wavelet decompo-
sition of a face pattern; low-low, low-high, high-low, high-
high sub-images. h[.] and g[.] represent 1-D low-pass and
high-pass filters, respectively.
A second approach is to use a 2-D low-pass fil-
ter and subtract the low-pass filtered image from the
original image. The resulting image also contains the
edge information of the original image and it is equiv-
alent to the sum of undecimated low-high, high-low,
and high-high sub-images, which we call the detail
image as shown in Fig. 2(b).
2.3 Feature Extraction and Eye
Localization
The first step of feature extraction is de-noising. The
detail image of a given face region is de-noised by
soft-thresholding using the method by (Donoho and
Johnstone, 1994). The threshold value t
n
is obtained
as follows:
t
n
=
r
2 log(n)
n
σ (3)
where n is the number of wavelet coefficients in the
region and σ is the estimated standard deviation of
Gaussian noise over the input signal. The wavelet co-
efficients below the threshold are forced to become
zero and those above the threshold are kept as are.
This initial step removes the noise effectively while
preserving the edges in the data.
The second step of the algorithm is to determine
the approximate horizontal position of eyes using the
horizontal projection in the upper part of the detail
image as eyes are located in the upper part of a typi-
cal human face (Fig. 2(a)). This provides robustness
against the effects of edges due to neck, mouth (teeth),
and nose on the horizontal projection. The index of
the global maximum in the smoothed horizontal pro-
jection in this region indicates the approximate hor-
izontal location of both eyes as shown in Fig. 2(d).
By obtaining a rough horizontal position, the detail
image is cropped horizontally according to the max-
imum as shown in Fig. 2(c). Then, vertical-crop
edge regions are obtained by cropping the horizon-
tally cropped edge image into two parts vertically as
shown in Fig. 2(e).
(a) (b) (c) (d) (e)
Figure 2: (a) An example face region with its (b) detail im-
age, and (c) horizontal-crop edge image covering eyes re-
gion determined according to (d) smoothed horizontal pro-
jection in the upper part of the detail image (the projection
data is filtered with a narrow-band low-pass filter to obtain
the smooth projection plot). Vertical-crop edge regions are
obtained by cropping the horizontal-crop edge image verti-
cally as shown in (e).
The third step is to compute again horizontal pro-
jections in both right-eye and left-eye vertical-crop
edge regions in order to detect the exact horizontal
positions of each eye separately. The global maxi-
mum of these horizontal projections for each eye pro-
vides the estimated horizontal levels. This approach
of dividing the image into two vertical-crop regions
provides some freedom on detecting eyes in oriented
face regions where eyes are not located on the same
horizontal level.
Since a typical human eye consists of white
sclera around dark pupil, the transition from white
to dark (or dark to white) area produces significant
jumps in the coefficients of the detail image. We take
advantage of this fact by calculating horizontal pro-
files on the estimated horizontal levels for each eye.
The jump locations are estimated from smoothed hor-

Figure 3: An example vertical-crop edge region with its
smoothed horizontal projection and profile. Eye candidate
points are obtained by pairing up the maximums in the hor-
izontal profile with the associated horizontal level.
izontal profile curves. An example vertical-crop edge
region with its smoothed horizontal projection and
profile are shown in Fig. 3. It is worth mentioning
that, the global maximum in the smoothed horizontal
profile signals is due to the transition both from white
sclera to pupil and pupil to white sclera region. The
first and last peaks correspond to outer and inner eye
corners. Since there is a transition from skin to white
sclera (or white sclera to skin) region, these peak
values are small compared to those of white sclera
to pupil (or pupil to white sclera) region. However,
this may not be the case in some eye regions. There
may be more (or less) than three peaks depending on
the sharpness of the vertical-crop eye region and eye
glasses.
Eye candidate points are obtained by pairing up
the indices of the maximums in the smoothed hor-
izontal profiles with the associated horizontal lev-
els for each eye. An example horizontal level esti-
mate with its candidate vertical positions are shown
in Fig. 3.
An SVM based classifier is used to discriminate
the possible eye candidate locations. A rectangle with
center around each candidate point is cropped and fed
to the SVM classifier. The size of rectangles depends
on the resolution of the detail image. However, the
cropped rectangular region is finally resized to a res-
olution of 25x25 pixels. The feature vectors for each
eye candidate region are calculated similar to the face
detection algorithm by concatenating the horizontal
and vertical projections of the rectangles around eye
candidate locations. The points that are classified as
an eye by SVM classifier are then ranked with respect
to their estimated probability values (Wu et al., 2004)
produced also by the classifier. The locations of eyes
are finally determined according to the most probable
point for each eye separately.
In this paper, we used a library for SVMs called
LIBSVM (Chang and Lin, 2001). Our simulations
are carried out in C++ environment with interface for
Python using radial basis function (RBF) as kernel.
LIBSVM package provides the necessary quadratic
programming routines to carry out the classification.
It performs cross validation on the feature set and
also normalizes each feature by linearly scaling it to
the range [−1, +1]. This package also contains a
multi-class probability estimation algorithm proposed
by (Wu et al., 2004).
3 EXPERIMENTAL RESULTS
The proposed eye localization algorithm is evaluated
on the CVL [http://www.lrv.fri.uni-lj.si/] and BioID
[http://www.bioid.com/] Face Databases in this paper.
All the images in these databases are with head-and-
shoulder faces.
The CVL database contains 797 color images of
114 persons. Each person has 7 different images of
size 640x480 pixels: far left side view, 45
◦
angle side
view, serious expression frontal view, 135
◦
angle side
view, far right side view, smile -showing no teeth-
frontal view, and smile -showing teeth- frontal view.
Since the developed algorithm can only be applied to
faces with frontal pose and upright orientation, our
experimental dataset contains 335 frontal view face
images from this database. Face detection is carried
out using (Turkan et al., 2006) method for this dataset
since the images are color.
The BioID database consists of 1521 gray level
images of 23 persons with a resolution of 384x286
pixels. All images in this database are the frontal view
faces with a large variety of illumination conditions
and face size. Face detection is carried out using In-
tel’s OpenCV face detection method
1
since all images
are gray level.
The estimated eye locations are compared with the
exact eye center locations based on a relative error
measure proposed by (Jesorsky et al., 1992). Let C
r
and C
l
be the exact eye center locations, and
˜
C
r
and
˜
C
l
be the estimated eye positions. The relative error of
this estimation is measured according to the formula:
d =
max
k C
r
−
˜
C
r
k, k C
l
−
˜
C
l
k
k C
r
−C
l
k
(4)
In a typical human face, the width of a single
eye roughly equals to the distance between inner eye
corners. Therefore, half an eye width approximately
equals to a relative error of 0.25. Thus, in this pa-
per we considered a relative error of d < 0.25 to be a
correct estimation of eye positions.
1
More information is available on
http://www.intel.
com/technology/itj/2005/volume09issue02/art03_
learning_vision/p04_face_detection.htm
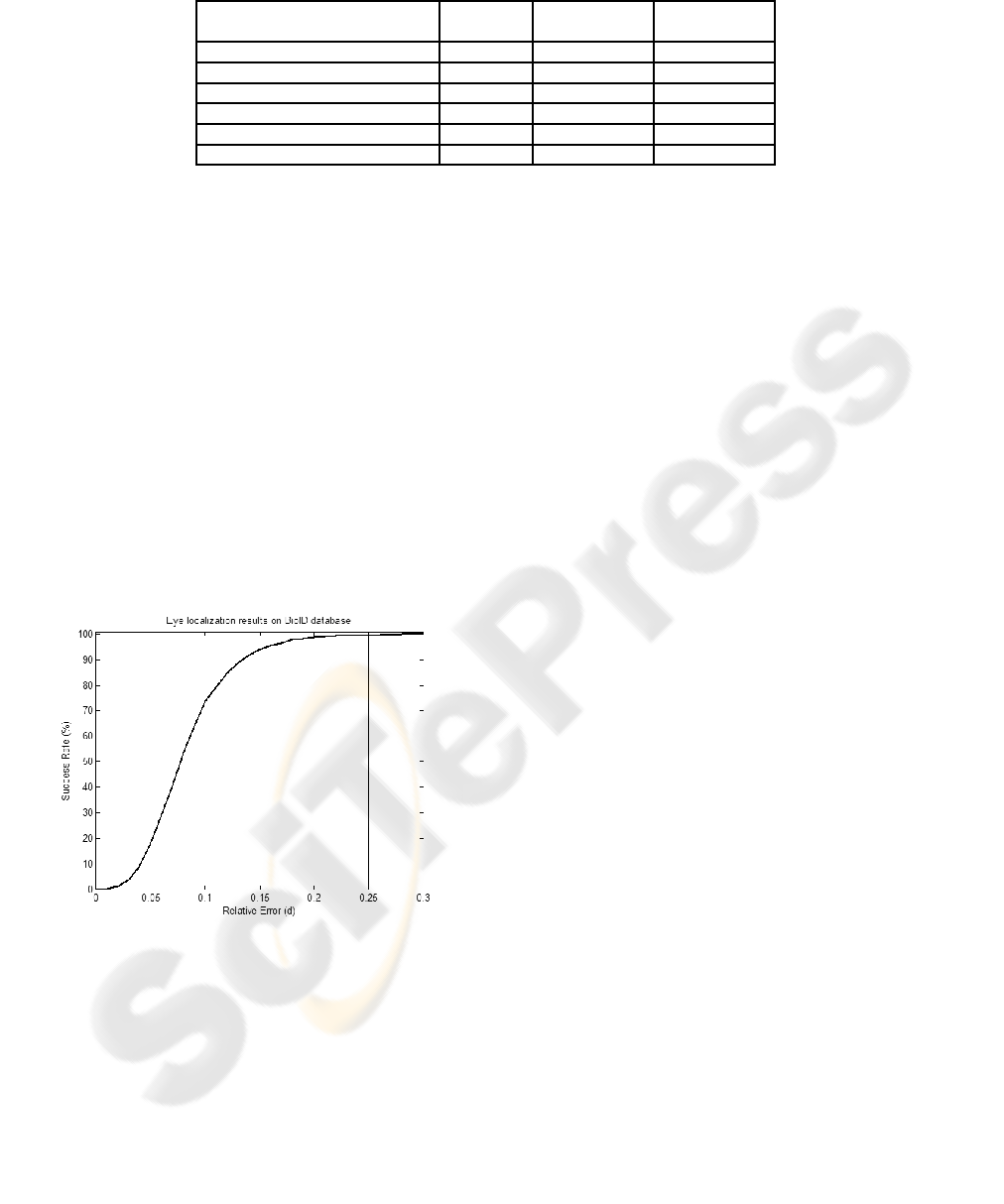
Table 1: Eye localization results.
Method Database Success Rate Success Rate
(d<0.25) (d<0.10)
Our method (edge projections) CVL 99.70% 80.90%
Our method (edge projections) BioID 99.46% 73.68%
(Asteriadis et al., 2006) BioID 97.40% 81.70%
(Zhou and Geng, 2004) BioID 94.81% –
(Jesorsky et al., 1992) BioID 91.80% 79.00%
(Cristinacce et al., 2004) BioID 98.00% 96.00%
Our method has a 99.46% overall success rate
for d < 0.25 on the BioID database while (Jesorsky
et al., 1992) achieved 91.80% and (Zhou and Geng,
2004) had a success rate 94.81%. (Asteriadis et al.,
2006) also reported a success rate 97.40% using the
same face detector on this database. (Cristinacce
et al., 2004) had a success rate 98.00% (we obtained
this value from their distribution function of relative
eye distance graph). However, our method reaches
73.68% for d < 0.10 while (Jesorsky et al., 1992) had
79.00%, (Asteriadis et al., 2006) achieved 81.70%,
and (Cristinacce et al., 2004) reported a success rate
96.00% for this strict d value. All the experimental
results are given in Table 1 and the distribution func-
tion of relative eye distances on the BioID database
is shown in Fig. 4. Some examples of estimated eye
locations are shown in Fig. 5.
Figure 4: Distribution function of relative eye distances of
our algorithm on the BioID database.
The proposed human eye localization system with
face detection algorithm (Turkan et al., 2006) is also
implemented in .NET C++ environment, and it works
in real-time with approximately 12 fps on a standard
personal computer.
4 CONCLUSION
In this paper, we presented a human eye localization
algorithm for faces with frontal pose and upright ori-
entation. The performance of the algorithm has been
examined on two face databases by comparing the
estimated eye positions with the ground-truth values
using a relative error measure. The localization re-
sults show that our algorithm is robust against both
illumination and scale changes since the BioID data-
base contains images with a large variety of illumi-
nation conditions and face size. To the best of our
knowledge, our algorithm gives the best results on the
BioID database for d < 0.25. Therefore, it can be
applied to human-computer interaction applications,
and be used as the initialization stage of eye trackers.
In eye tracking applications, e.g., (Bagci et al., 2004),
a good initial estimate is satisfactory as the tracker
further localizes the positions of eyes. For this rea-
son, d < 0.25 results are more important than those of
d < 0.10 from the tracker point of view.
Our algorithm provides approximately 1.5% im-
provement over the other methods. This may not look
that great at first glance but it is a significant improve-
ment in a commercial application as it corresponds
to one more satisfied customer in a group of hundred
users.
ACKNOWLEDGEMENTS
This work is supported, in part, by European
Commission Network of Excellence FP6-507752
Multimedia Understanding through Semantics,
Computation and Learning (MUSCLE-NoE
[http://www.muscle-noe.org/]) and FP6-511568
Integrated Three-Dimensional Television- Cap-
ture, Transmission, and Display (3DTV-NoE
[https://www.3dtv-research.org/])projects.

(a)
(b)
Figure 5: Examples of estimated eye locations from the (a) BioID, (b) CVL database.
REFERENCES
Asteriadis, S., Nikolaidis, N., Hajdu, A., and Pitas, I.
(2006). An eye detection algorithm using pixel to
edge information. In Proc. Int. Symposium on Con-
trol, Communications, and Signal Processing. IEEE.
Bagci, A. M., Ansari, R., Khokhar, A., and Cetin, A. E.
(2004). Eye tracking using markov models. In Proc.
Int. Conf. on Pattern Recognition, volume III, pages
818–821. IEEE.
Cetin, A. E. and Ansari, R. (1994). Signal recovery from
wavelet transform maxima. IEEE Trans. on Signal
Processing, 42:194–196.
Chang, C. C. and Lin, C. J. (2001). LIBSVM: a library for
support vector machines. Software available at
http:
//www.csie.ntu.edu.tw/
˜
cjlin/libsvm
.
Cristinacce, D., Cootes, T., and Scott, I. (2004). A multi-
stage approach to facial feature detection. In Proc.
BMVC, pages 231–240.
Daubechies, I. (1990). The wavelet transform, time-
frequency localization and signal analysis. IEEE
Trans. on Information Theory, 36:961–1005.
Donoho, D. L. and Johnstone, I. M. (1994). Ideal spa-
tial adaptation via wavelet shrinkage. Biometrika,
81:425–455.
Garcia, C. and Tziritas, G. (1999). Face detection us-
ing quantized skin color regions merging and wavelet
packet analysis. IEEE Trans. on Multimedia, 1:264–
277.
Huang, W. and Mariani, R. (2000). Face detection and
precise eyes location. In Proc. Int. Conf. on Pattern
Recognition, volume IV, pages 722–727. IEEE.
Jesorsky, O., Kirchberg, K. J., and Frischholz, R. W. (1992).
Robust face detection using the hausdorff distance. In
Proc. Int. Conf. on Audio- and Video-based Biomet-
ric Person Authentication, volume 2091, pages 90–95.
Springer, Lecture Notes in Computer Science.
Kim, C. W., Ansari, R., and Cetin, A. E. (1992). A class of
linear-phase regular biorthogonal wavelets. In Proc.
Int. Conf. on Acoustics, Speech, and Signal Process-
ing, volume IV, pages 673–676. IEEE.
Mallat, S. G. (1989). A theory for multiresolution sig-
nal decomposition: the wavelet representation. IEEE
Trans. on Pattern Analysis and Machine Intelligence,
11:674–693.
Morimoto, C. H. and Mimica, M. R. M. (2005). Eye gaze
tracking techniques for interactive applications. Com-
puter Vision and Image Understanding, 98:4–24.
Turkan, M., Dulek, B., Onaran, I., and Cetin, A. E. (2006).
Human face detection in video using edge projections.
In Proc. Int. Society for Optical Engineering: Visual
Information Processing XV, volume 6246. SPIE.
Viola, P. and Jones, M. (2001). Rapid object detection using
a boosted cascade of simple features. In Proc. Com-
puter Society Conf. on Computer Vision and Pattern
Recognition, volume I, pages 511–518. IEEE.
Wu, J. and Zhou, Z. H. (2003). Efficient face candi-
dates selector for face detection. Pattern Recognition,
36(5):1175–1186.
Wu, T. F., Lin, C. J., and Weng, R. C. (2004). Probabil-
ity estimates for multi-class classification by pairwise
coupling. The Journal of Machine Learning Research,
5:975–1005.
Zhou, Z. H. and Geng, X. (2004). Projection functions for
eye detection. Pattern Recognition, 37(5):1049–1056.
Zhu, Y., Schwartz, S., and Orchard, M. (2000). Fast face de-
tection using subspace discriminant wavelet features.
In Proc. Conf. on Computer Vision and Pattern Recog-
nition, volume I, pages 636–642. IEEE.
Zhu, Z. and Ji, Q. (2005). Robust real-time eye detection
and tracking under variable lighting conditions and
various face orientations. Computer Vision and Image
Understanding, 98:124–154.
