
DETECTING COPLANAR FEATURE POINTS IN HANDHELD
IMAGE SEQUENCES
Olaf K¨ahler and Joachim Denzler
Department of Mathematics and Computer Science, Friedrich-Schiller-University, Jena, Germany
Keywords:
Planar patches, homography, degenerate motion.
Abstract:
3D reconstruction applications can benefit greatly from knowledge about coplanar feature points. Extracting
this knowledge from images alone is a difficult task, however. The typical approach to this problem is to search
for homographies in a set of point correspondences using the RANSAC algorithm. In this work we focus on
two open issues with a blind random search. First, we enforce the detected planes to represent physically
present scene planes. Second, we propose methods to identify cases, in which a homography does not imply
coplanarity of feature points. Experiments are performed to show applicability of the presented plane detection
algorithms to handheld image sequences.
1 INTRODUCTION
Planar structures are abundant in man-made environ-
ments and impose strong geometric constraints for the
points on them. They have caught the interest of re-
search before, and a typical application is the repre-
sentation of video data as independent layers (Baker
et al., 1998; Odone et al., 2002) or the interpretation
of 3D scene structure (Gorges et al., 2004). Also, for
geometric reconstruction tasks, planar structures play
an important role. E.g. incorporation of the copla-
narity constraints into a point based reconstruction al-
gorithm has been explored (Bartoli and Sturm, 2003)
and computing 3D planes from 2D homographies is
possible (Rother, 2003). To benefit from coplanarity
in 3D reconstruction, it is necessary to detect the pla-
nar structures from 2D information alone.
A central concept for the identification of copla-
nar features in image sequences is the plane induced
homography (Baker et al., 1998). Planar regions are
mapped from one image of the sequence to another by
a 2D-2D projective mapping, also called collineation
or homography. This key idea has been used before
to search for dominant homographies in a set of point
correspondences using random sampling consensus
and related techniques (Odone et al., 2002; Lourakis
et al., 2002; Gorges et al., 2004; K¨ahler and Denzler,
2006). While the mentioned works purely rely on a
sparse set of correspondences, other, computationally
more intensive methods concentrate on an accurate
segmentation and delineation of the planes using re-
gion growing algorithms and dense matching (Fraun-
dorfer et al., 2006). Our work is settled among the
fast, actually real-time algorithms using only sparse
correspondences. The addressed problems, however,
are inherent to the usage of homographies in general,
independent of the method actually used.
While a homography might cover coplanarity in
a geometrical sense, the actually interesting, phys-
ically present scene planes are only a small subset
of all possibly coplanar point sets. A blind search
as in RANSAC will therefore detect spurious, “vir-
tual” planes, which was also recognized in previous
research (Gorges et al., 2004). We present a more rig-
orous analysis of the problem in section 3, leading to
a theoretically justified side condition in plane search.
Although the homography is a necessary criterion
for planar regions, it is not a sufficient one (K¨ahler
and Denzler, 2006). To give a very simple example,
all points are mapped by a common homography, the
identity, between two images of a static camera. Yet
not all the points need to be on one plane. Copla-
narity of points can only be detected, if the optical
center has moved between two images. As cases with
a static or a purely rotating camera are abundant in
handheld image sequences, zero camera translations
have to be identified automatically and a detection of
false planes has to be prevented then. In section 4,
we outline the analysis of (K¨ahler and Denzler, 2006)
and extend it by model selection criteria (Torr et al.,
447
Kähler O. and Denzler J. (2007).
DETECTING COPLANAR FEATURE POINTS IN HANDHELD IMAGE SEQUENCES.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications - IU/MTSV, pages 447-452
Copyright
c
SciTePress

1999). An experimental performance evaluation and
comparison of the approaches is provided in section 5.
2 DETECTING PLANES
To detect planar regions in an image sequence, at
first point correspondences are established between
two images of the sequence. In this work, we use
KLT-tracking (Shi and Tomasi, 1994), which seems
appropriate for e.g. 30 frames/sec and typical mo-
tion speeds of handheld cameras. For plane detection,
we analyze the motion of the points between two, not
necessarily successive frames.
The key idea for detection of coplanarity then is to
find homographies. It is well known that planar scene
areas observed in two different views with a perspec-
tive camera are related to each other by a homogra-
phy. Hence we can define the task of detecting a pla-
nar patch as finding “a set of points that is transferred
between two images by a common homography”.
2.1 Basic Ransac
In the task of finding planes, it is intuitive to take
care of points off the plane. If finding the plane in-
duced homography is considered an estimation prob-
lem, the points off the plane are outliers and meth-
ods of robust estimation can be applied. In particu-
lar the RANSAC approach seems to be the method of
choice for this problem, and it was also used in previ-
ous works (Gorges et al., 2004; Lourakis et al., 2002).
The RANSAC approach generates hypotheses by
selecting a minimum number of random points, such
that a homography can be estimated. These are typi-
cally four points with no three of them being collinear.
Approaches with three points are possible, but require
additional constraints like known epipolar geome-
try (Lourakis et al., 2002) and are not used here.
Once the homography induced by the hypothe-
sis is computed, the point correspondences supporting
this hypothesis can be counted. The supporting points
are those correctly transferred by the homography up
to e.g. 2 pixels accuracy. Many hypotheses are gener-
ated and in the end the homography supported by the
largest number of point correspondences is kept. This
is called the dominant homography or plane (Odone
et al., 2002; Gorges et al., 2004).
2.2 Iterative Dominant Homography
It is straight forward to extend this in order to get a
decomposition of all the observed point correspon-
dences into several homographies, or a decomposi-
tion of the set of points into planes. Once a domi-
nant homography is found, the points supporting it are
removed and another dominant homography is com-
puted for the remaining points. This is iterated until
no more homographies can be established.
3 PLANES TO AVOID
Up to now, a blind search is employed to detect all
kinds of coplanar points. This can not be enough to
identify physically present scene planes, as is shown
in figure 1. “Virtual” planes are detected there. These
do actually consist of coplanar points, but the geomet-
ric plane containing the points does not correspond to
any physical plane in the scene. With the purely geo-
metric definition of coplanarity used so far, it is not
possible to distinguish “virtual” planes from physical
scene planes.
On first sight, the points on virtual planes seem
to be distributed along two lines, as in figure 1. But
as the virtual plane intersects a third or fourth physi-
cal scene plane, a third or fourth line distribution will
result. On a closer look, the physical planes we are in-
terested in are contiguous 2D entities in 3D space, and
as such they are mapped to contiguous 2D areas in the
observed images. The definition of a planar patch is
hence extended to “a set of points in a closed region
that is transferred between two images by a common
homography”. This enforces validity of the homogra-
phy for the whole closed region, and not only at some
of its outlines.
Various strategies can be used to implement this
definition algorithmically. Constructing a dense set
of matches while using region growing might be one
solution (Fraundorfer et al., 2006). The closed re-
gion constraint is then directly enforced by the re-
gion growing algorithm. Working only on a sparse
set of correspondences, the problem was approached
by picking the four seed points of RANSAC in a local
neighborhood (Gorges et al., 2004). Thus it is likely
to compute the homography of a physical plane, and
Figure 1: Detection of a “virtual” plane, that contains copla-
nar points but does not correspond to any physical plane.

that all other points conforming the homography are
on the same physical plane.
The idea used in this work is to pick all point cor-
respondences in a closed area of the image as seed
points. This is achieved by starting from one random
point and then iteratively adding the closest known
point correspondences, until a homography can be
computed. Approaching a dense set of correspon-
dences, it is more and more certain that the detected
planes correspond to physical scene planes.
4 NO CAMERA TRANSLATION
The use of homographies introduces another problem
to plane detection. Homographies are a necessary cri-
terion for coplanarity, but not a sufficient one. In case
of a camera rotation or zoom without a translation of
the optical center, no information on coplanarity can
be inferred. This can also be derived from the follow-
ing standard decomposition of a homography H:
H = αK
2
(R+
1
d
tn
T
)K
−1
1
(1)
where K
1
and K
2
are the intrinsic camera matrices, R
and t are the relative motion and n and d are the plane
normal its distance from the origin.
If and only if t = 0, a difference in plane normals
n does not influence the homography H. We hence
extend the definition of a planar patch to “a set of
points in a closed region that is transferred by a com-
mon homography in case of non-zero camera trans-
lation”. Several methods were proposed to identify a
non-zero camera translation (Torr et al., 1999; K¨ahler
and Denzler, 2006). A short overview of the different
approaches is given in the following, in order to show
applicability to our problem and motivate the experi-
mental comparison performed in section 5.
4.1 Homography Decomposition
A first idea is to analyze a single homography matrix
and check for both the terms of the decomposition (1).
The term tn
T
is not present if there was no camera
translation t = 0 or if the homography was induced by
the plane at infinity n = 0. Although these two cases
can not be disambiguated, using only knowledge of
a single homography allows to handle independently
moving scene planes, which will not be the case for
the methods presented later on.
In the simplest case, the intrinsic camera matrices
K
1
and K
2
are known. The matrix H
′
then expresses
the homography in camera coordinates:
H
′
= K
−1
2
HK
1
= α(R+
1
d
tn
T
)
If and only if t= 0 or n = 0, H
′
is a scaled rotation ma-
trix αR, and all singular values of H
′
are equal. Test-
ing for a translational part in H can hence be achieved
by computing the ratio of largest to smallest singular
value of H
′
, which will be 1 for t = 0.
Frequently the intrinsic camera parameters are un-
known, but known to be constant. In such cases a
slightly different analysis of H can be used. The ma-
trices H and H
′
will be related by a similarity relation,
i.e. they will have the same determinant, eigenvalues
and some more properties, which can be found in any
linear algebra textbook. Again if t = 0 then H
′
is a
scaled rotation matrix, all eigenvalues of H will have
the same absolute value, and the ratio of largest to
smallest absolute eigenvalue will be 1. This is not a
two way implication, as was pointed out in (Torr et al.,
1999). In the case of n
T
R
T
t = 0, the triple absolute
eigenvalue of 1 will follow for arbitrary t.
For both criteria, small deviations from the ratio of
1 can be allowed to cope with noisy correspondences
and inaccurate homographies. An experimental eval-
uation of the detection rate vs. false alarms with dif-
ferent thresholds is given in section 5.2.
4.2 Global Homography
If no knowledge about the intrinsic parameters is
available, analyzing on-plane information for a single
homography matrix can not be sufficient for deciding,
whether a camera translation was present or not. E.g.
with a QR-decomposition, any homography matrix H
can be decomposed into a rotation R and an upper tri-
angular matrix K
2
. The term tn
T
from equation (1) is
not necessary. Using off-plane information however,
a static scene has to be assumed.
An intuitive idea is to check, whether all observed
points conform with the same homography (Fraun-
dorfer et al., 2006). In cases with just one scene plane
visible, such a test will fail. The only other cases with
a global homography are a pure rotation and change
of intrinsics without translation.
Hence, if the dominant homography from sec-
tion 2.2 is valid for almost all points, we can as-
sume that no camera translation was present. A small
amount of outliers should be tolerated, however, to
handle incorrect point correspondences. As before,
this introduces an adjustable threshold and a trade-off
between detection and false alarm rates. An experi-
mental evaluation is given in section 5.2.
4.3 Model Selection
Detecting degenerate camera motions without adjust-
ing thresholds would be an appealing alternative. We
will therefore investigate statistical model selection
approaches in this context (Torr et al., 1999; Kanatani,
2004). The basic idea is to select, whether the global
homography or the epipolar geometry model is better
suited to explain the observed point correspondences.
In a sense, this is the global homography criterion
of above with the threshold determined automatically,
depending on the performance of epipolar geometry.
Hence these methods can also be used in case of un-
known intrinsic parameters and they will also fail in
case of only one plane visible.
To apply model selection, first the two models are
instantiated with the respective optimal parameters.
The most dominant homographyis used as before and
the epipolar geometry is established using RANSAC
and the normalized 8-Point-Algorithm. The residuals
ε
(M)
i
for point i ∈ [1. . . N] using model M can then be
computed. It is not sufficient to compare these residu-
als, as models with more degrees of freedom will usu-
ally adapt better to the observed data. The costs for
using model M have to be considered, and the task is
to select
ˆ
M explaining the correspondences with least
residuals and least number of parameters k
(M)
.
To handle constraints of different dimensionality,
geometric model selection criteria have been devel-
oped (Kanatani, 2004; Torr, 1997). As a key, the i-th
point correspondence has to be considered as a vec-
tor (x
i
, y
i
, x
′
i
, y
′
i
) with D = 4 degrees of freedom. The
homography model constraints a point (x
i
, y
i
) onto a
corresponding point (x
′
i
, y
′
i
), and hence is a model of
dimension d
(H)
= 2. The epipolar geometry in con-
trast restricts a point only onto a corresponding epipo-
lar line, and as a third parameter is needed to define
the whole correspondence, this is a model of dimen-
sion d
(F)
= 3. The residuals can only be measured
in the dimensions actually constrained by the model.
To compensate for these different residual measure-
ments, the degrees of freedom in the correspondences
d
(M)
have to influence the overall costs as well.
Further the noise disturbing the point correspon-
dences has to be known in order to establish a relation
between the residuals ε
(M)
i
, the number of parameters
k
(M)
and the dimensionality d
(M)
of a model. If an
isotropic normal distribution is assumed, the standard
deviation σ can be estimated as the expected residual
of the most general model F (Kanatani, 2004):
σ
2
=
N
∑
i=1
ε
(M
∗
)2
i
D− d
(M
∗
)
N − k
(M
∗
)
Now the cost of a model is a weighted sum of all
the mentioned contributions, and the model with least
cost is selected. Different weightings have been pro-
Table 1: Various values for γ
1
and γ
2
found in model selec-
tion literature.
Name γ
1
γ
2
GAIC (Kanatani, 2004) 2 2
GBIC1 (Torr, 1997) 2 2lnN
GBIC2 (Torr et al., 1999) ln4 ln(4N)
GMDL (Kanatani, 2004) −ln
σ
2
S
2
−ln
σ
2
S
2
posed, however. They can be summarized as:
Cost(M) =
N
∑
i=1
ε
(M)2
i
σ
2
+ γ
1
d
(M)
N + γ
2
k
(M)
(2)
with γ
1
and γ
2
from table 1. In the GMDL criterion,
the image size S is explicitly used to avoid influences
from different scalings.
These methods are easily applied to our problem
of identifying camera translation. If the homogra-
phy is a “cheaper” model than the epipolar geometry,
in the sense of fitting the observed correspondences
comparably accurate but with fewer degrees of free-
dom, we assume a zero camera translation was re-
sponsible for that global homography. In section 5.2,
the performance of different γ
1
and γ
2
will be com-
pared to each other and to the thresholded criteria.
5 EXPERIMENTS
Our proposed methods directly tackle the mentioned
problems of plane detection, and hence allow the
detection of coplanarity in a much wider range of
scenarios. To demonstrate the overall performance
in practical applications, we present an experimental
evaluation of the algorithms. First, the basic setup
of the experiments and qualitative results are shown,
then in section 5.2 the methods for detection of cam-
era translation are compared.
5.1 Qualitative Evaluation
For the evaluation, two types of scene setups were
used. The first of them can be considered rather ar-
tificial, showing an office environment with checker-
board patterns placed in the scene. These patterns
are used only to provide good features for the point
tracker, they are not needed in the further processing
steps. The second set is made up from architectural
scenes of model buildings.
Examples from the sequences with detected
planes are shown in figures 2 and 3. Note that for vi-
sualization, a convex hull of the coplanar points was
computed. Not all the pixels within these polygons
satisfy the coplanarity constraints, as can be seen e.g.

Figure 2: Excerpts of a calibration pattern scene with planar patches detected in the individual frames shown as polygons with
thick boundary lines.
Figure 3: Excerpts of an architectural scene with the polygons delineating planar patches found from point correspondences.
at the chimneys on top of the roof in figure 3. Also,
finding the exact delineations of the planes is beyond
the scope of this work. Provided only information
at the sparse feature points however, the results are
fairly accurate, and especially the detected planes cor-
respond to physical scene planes.
5.2 Detecting Cases Without
Translation
While for the plane detection itself, a ground-truth
based analysis is hardly possible, the detection of
camera translation can be evaluated accurately. Using
a motorized zoom and a tripod, image sequences were
recorded with purely rotating, zooming and generally
moving camera. These motion classes were labeled
by hand, allowing a comparison of the algorithms’
performance with ground truth data.
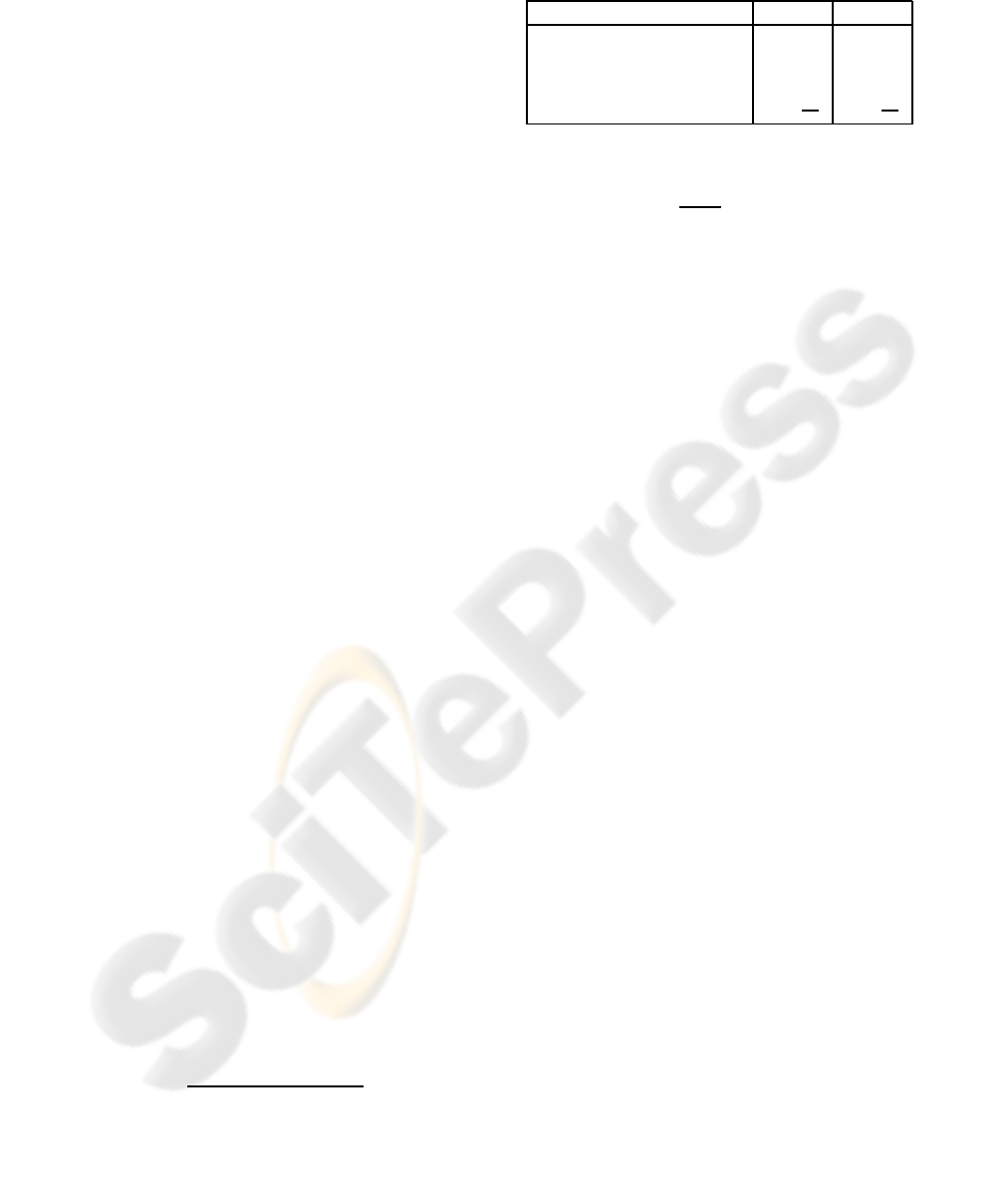
The sample graph in figure 4 shows the confidence
of various criteria in a translational motion over the
frames of an image sequence. Note the cases with
static camera are clearly identified by all criteria. Also
the higher peaks in the frames with general motion
allow to identify the camera translation.
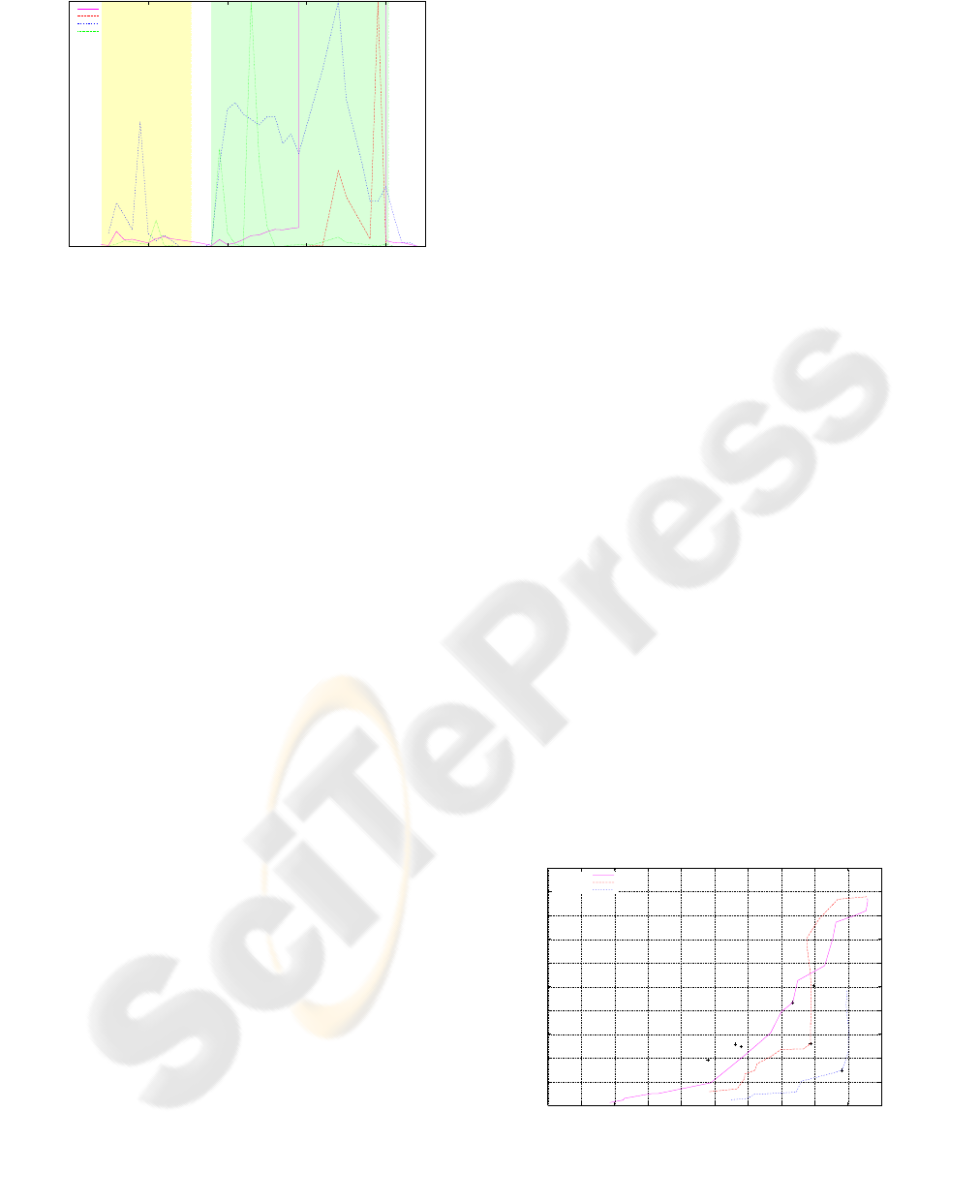
Several of the criteria need a threshold for decid-
ing the type of camera motion. As usual, this leads to
a tradeoff between sensitivity and specificity, which
is illustrated in a ROC-curve in figure 5. Also the
detection vs. false alarm rate of the model selection
criteria is shown for comparison. In this evaluation,
the frames with zooming cameras were ignored, as
they can not be handled by the singular and eigen-
value criteria. The other methods work equally well
for identification of purely zooming cameras.
The global homographycriterion seems to outper-
form the others for a wide range of thresholds. If no
static scene can be assumed and one of the homog-
raphy decomposition approaches is used, the eigen-
value criterion seems to be the best choice. The model
selection criteria GAIC and GBIC1, differing only
slightly in the choice of γ
2
, show almost exactly the
same performance.
Reasonable thresholds were marked for the crite-
ria requiring one. For the global homography crite-
rion, 12% of outliers are tolerated, for the homogra-
phy decomposition based criteria, a ratio of largest to
smallest singular or eigenvalue of less than 1.17 was
a good indicator for a pure rotation matrix.
6 CONCLUSIONS
Searching for homographies in point correspondences
is a simple, but effectivemethod of detecting coplanar
feature points. As a novelty, we presented an analysis
of situations, where the blind search or even where a
0 50 100 150 200
confidence in translation
frame 0 50 100 150 200
confidence in translation
frame 0 50 100 150 200
confidence in translation
frame 0 50 100 150 200
confidence in translation
frame 0 50 100 150 200
confidence in translation
frame 0 50 100 150 200
confidence in translation
frame 0 50 100 150 200
confidence in translation
frame
singular
eigenenval
global
GMDL
Figure 4: Confidence of different criteria in a camera trans-
lation. White background indicates static camera, yellow
background a pure rotation and green background a general
motion including translation.
homography does not suffice to identify planes. First
we enforced that the purely geometric homographies
represent physical scene planes, then the case of a
global homography resulting from zero camera trans-
lation was analyzed. Finally, the overall effectiveness
of plane detection was shown in experiments.
Defining coplanarity only via the geometric trans-
fer function of a homography, it is not possible to de-
cide, whether a plane is only geometrically present or
corresponding to a physical scene plane. The key idea
was to use points in a closed image area for the def-
inition of planar patches, as the contiguous 3D plane
surfaces have to be mapped to contiguous 2D areas.
Finally, planes can not be detected in every sit-
uation. If there was no camera translation between
two frames and the optical centers are identical, no
information on coplanarity can be gained. Demand-
ing validity of the detected homographies for frames
with non-zero camera translation allows to handle this
degeneracy. An automatic classification of the camera
motion allows the detection of coplanar feature points
also in handheld image sequences.
REFERENCES
Baker, S., Szeliski, R., and Anandan, P. (1998). A layered
approach to stereo reconstruction. In Proc. Computer
Vision and Pattern Recognition, pages 434–441, Santa
Barbara, CA.
Bartoli, A. and Sturm, P. (2003). Constrained structure and
motion from multiple uncalibrated views of a piece-
wise planar scene. International Journal of Computer
Vision, 52(1):45–64.
Fraundorfer, F., Schindler, K., and Bischof, H. (2006).
Piecewise planar scene reconstruction from sparse
correspondences. Image and Vision Computing,
24(4):395–406.
Gorges, N., Hanheide, M., Christmas, W., Bauckhage, C.,
Sagerer, G., and Kittler, J. (2004). Mosaics from arbi-
trary stereo video sequences. In Proc. 26th DAGM
Symposium, pages 342–349, Heidelberg, Germany.
Springer-Verlag.
K¨ahler, O. and Denzler, J. (2006). Detection of planar
patches in handheld image sequences. In Proceedings
Photogrammetric Computer Vision 2006, volume 36
of International Archives of the Photogrammetry, Re-
mote Sensing and Spatial Information Sciences, pages
37–42.
Kanatani, K. (2004). Uncertainty modeling and model
selection for geometric inference. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
26(10):1307–1319.
Lourakis, M., Argyros, A. A., and Orphanoudakis, S. C.
(2002). Detecting planes in an uncalibrated image
pair. In Proc. British Machine Vision Conference
(BMVC2002), pages 587–596.
Odone, F., Fusiello, A., and Trucco, E. (2002). Layered
representation of a video shot with mosaicing. Pattern
Analysis and Applications, 5(3):296–305.
Rother, C. (2003). Linear multi-view reconstruction of
points, lines, planes and cameras using a reference
plane. In Proceedings ICCV 2003, pages 1210–1217,
Nice, France.
Shi, J. and Tomasi, C. (1994). Good features to track.
In IEEE Conference on Computer Vision and Pattern
Recognition CVPR, pages 593–600.
Torr, P. H., Fitzgibbon, A., and Zisserman, A. (1999). The
problem of degeneracy in structure and motion recov-
ery from uncalibrated image sequences. International
Journal of Computer Vision, 32(1):27–45.
Torr, P. H. S. (1997). An assessment of information criteria
for motion model selection. In IEEE Conference on
Computer Vision and Pattern Recognition, pages 47–
53.
0
10
20
30
40
50
60
70
80
90
100
0 10 20 30 40 50 60 70 80 90 100
false detections
detected translations
GAIC
GBIC1
GBIC2
GMDL
0.12
1.17
1.17
singular
eigenval
global
Figure 5: ROC-curve for different methods of detecting
camera translation. An optimal method had 100% of de-
tected translations with 0% of false detections, which is sit-
uated in the lower right corner.
