
CUED SPEECH HAND SHAPE RECOGNITION
Belief Functions as a Formalism to Fuse SVMs & Expert Systems
Thomas Burger, Alexandra Urankar
France Telecom R&D, 28 ch. Vieux Chêne, Meylan, France
Oya Aran, Lale Akarun
Dep. of Comp. Eng., Bogazici University, Bebek 34342, Istanbul, Turkey
Alice Caplier
LIS, Institut National Polytechnique de Grenoble, 46 av. Felix Viallet, Grenoble, France
Keywords: Support Vector Machine, Expert systems, Belief functions, Hu invariants, Hand shape and gesture
recognition, Cued Speech.
Abstract: As part of our work on hand gesture interpretation, we present our results on hand shape recognition. Our
method is based on attribute extraction and multiple binary SVM classification. The novelty lies in the
fashion the fusion of all the partial classification results are performed. This fusion is (1) more efficient in
terms of information theory and leads to more accurate result, (2) general enough to allow other source of
information to be taken into account: Each SVM output is transformed to a belief function, and all the
corresponding functions are fused together with some other external evidential sources of information.
1 INTRODUCTION
Hand shape recognition is a widely studied topic
which has a wide range of applications such as HCI
(Pavlovic, 1997), automatic translators, tutoring
tools for the hearing-impaired (Ong, 2005), (Aran,
2005), augmented reality, and medical image
processing.
Even if this field is dominated by Bayesian
methods, several recent works deal with evidential
methods, as they bring a certain advantage in the
fashion uncertainty is processed in the decision
making (Quost, 2007), (Capelle, 2004).
The complete recognition of a hand shape with
no constraint on the shape is an open issue. Hence,
we focus on the following problem: (1) the hand is
supposed to roughly remain in a plan which is
parallel to the acquisition plan (2) only nine different
shapes are taken into account (Figure 1a). On the
contrary, no assumption is made on the respective
location of the fingers (whether they are gathered or
not) except for hand shapes 2 (gathered fingers) and
8 (as separated as possible), as this is their only
difference. These nine hand shapes correspond to the
gesture set used in Cued Speech (Cornett, 1967).
(a) Artificial representation of the hand shape classes.
(b) Segmented hand shape examples from real data
Figure 1: The 9 hand shape classes.
There are many methods already developed to
deal with hand modeling and analysis. For a
complete review, see (Derpanis, 2004), (Wu, 2001).
In this paper, we do not develop the segmentation
aspect. Hence, we consider several corpuses of
binary images such as in Figure 1b, as the basis of
our work. The attribute extraction is presented in
5
Burger T., Urankar A., Aran O., Akarun L. and Caplier A. (2007).
CUED SPEECH HAND SHAPE RECOGNITION - Belief Functions as a Formalism to Fuse SVMs & Expert Systems.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications - IU/MTSV, pages 5-12
Copyright
c
SciTePress

Section 2. The required classification tools are
presented in Section 3. Section 4 is the core of this
paper: we apply the decision making method, which
is theoretically presented in (Burger, 2006), to our
specific problem, and we use its formalism as a
framework in which it is possible to combine
classifiers of various nature (SVMs and expert
systems) providing various partial information.
Finally, Section 5 provides experimental results.
2 ATTRIBUTE DEFINITION
2.1 Hu Invariants
The dimensionality of the definition space for the
binary images we consider is too large, and it is
intractable to use pixel coordinates in that space to
perform the classification. One needs to find a more
compact representation of the information contained
in the image. Several such binary image descriptors
are to be found in the image compression literature
(Zhang, 2003). They can be classified into two main
categories:
Region descriptors, which describe the binary
mask of a shape, such as Zernike moments, Hu
invariants, grid descriptors…
Edge descriptors, which describe the closed
contour of the shape, such as Fourier descriptors,
Curvature Scale Space (CSS) descriptors…
Region descriptors are less sensitive to edge
noise because of an inertial effect of the region
description. Edge descriptors are more related to the
way human compare shapes.
A good descriptor is supposed to obey several
criteria, such as several geometrical invariance,
compactness, being hierarchical (so that the
precision of the description can be truncated), and be
representative of the shape.
We focus on Hu invariants, which are successful
in representing hand shapes (Caplier, 2004). Their
purpose is to express the mass repartition of the
shape via several inertial moments of various orders,
on which specific transforms ensure invariance to
similarities.
Let us compute the classical definition of
centered inertial moments of order p+q, for the
shape (invariant to translation, as they are centered
on the gravity center):
(
)
(
)
(, )
pq
pq
xy
mxxyyxydxdy
δ
=− −
∫∫
(1)
With
and
x
y
being the coordinates of the
gravity center of the shape and
(, ) 1xy
δ
=
if the
pixel belongs to the hand shape and 0 otherwise. In
order to make these moments invariant to scale, we
normalize them:
1
2
00
+
+
=
qp
pq
pq
m
m
n
(2)
Then, we compute the six Hu invariants, which
are invariant to rotation, and mirror reflection:
()
()()
()()
( )()()()
()
( )()()()
()
()()()
()
()()
210312
30
2
11
2
2103
2
12
30
02206
2
2103
2
12
30
21032103
2
2103
2
12
30
12
30
12
30
5
2
2103
2
12
30
4
2
2103
2
12
30
3
2
11
2
02202
02201
4
33
33
33
4
nnnnn
nnnnnnS
nnnnnnnn
nnnnnnnnS
nnnnS
nnnnS
nnnS
nnS
+⋅+⋅⋅+
+−+⋅+=
+−+⋅⋅+⋅⋅−−
+⋅−+⋅+⋅⋅−=
+++=
⋅−+⋅−=
⋅++=
+
=
(3)
A seventh invariant is available. Its sign permits
to discriminate mirror images and thus, to suppress
the reflection invariance:
(
)
(
)
(
)( )
(
)
()()()()
(
)
2
2103
2
12
30
21031230
2
2103
2
12
30
12
30
03217
33
3..3
nnnnnnnn
nnnnnnnnS
+++⋅⋅+⋅⋅−−
+⋅−++−⋅=
(4)
The reflection invariance has been removed at
the acquisition level and only left hands are
processed. Hence, we do not need to discriminate
mirror images. We nevertheless use S
7
as both the
sign and the magnitude carry information: it
sometimes occurs that hand shapes 3 and 7 (both
with separated fingers) really look like mirror
images. Finally, the attributes are:
{S
1
, S
2
, S
3
, S
4
, S
5
, S
6
, S
7
}.
2.2 Thumb Presence
The thumb is an easy part to detect, due to its
peculiar size and position with respect to the hand.
Moreover, the thumb presence is a very
discriminative piece of evidence as three hand
shapes require the thumb and six do not require it.
The thumb detector works as follows:
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
6

Figure 2: Thumb detection.
(1) Polar parametric definition: By following the
contour of the hand shape, a parametric
representation {ρ(
τ), θ(τ)} is derived in polar
coordinates (Figure 2)
(2) Peak detection: After smoothing the
parametric functions, (low-pass filtering and sub-
sampling), the local maxima of the ρ function are
detected. Obviously, they correspond to the potential
fingers (Figure 2b).
(3) Threshold adaptation: Thresholds must be
defined on the distance and the angle values to
indicate the region in which a thumb is plausible.
The angle thresholds that describe this region are
derived from morphological statistics (Norkin,
1992). In practice, the thumb angle with respect to
the horizontal axis (Figure 2b) is between 20° and
65°. The distance thresholds are derived from a basic
training phase whose main purpose is to adapt the
default approximate values (1/9 and 5/9 of the hand
length) via a scale normalization operation with
respect to the length of the thumb. Even if the
operation is simple, it is mandatory to do so, as the
ratio of the thumb length with respect to the total
hand length varies from hand to hand.
(4) Peak measurement: If a finger is detected in
the area defined by these thresholds, it is the thumb.
Its height with respect to the previous local minima
(Figure 2) is measured. It corresponds to the height
between the top of the thumb and the bottom of the
inter-space between the thumb and the index. This
value is the thumb presence indicator (it is set to
zero when no thumb is detected). In practice, the
accuracy of the thumb detection (the thumb is
detected when the corresponding indicator has a
non-zero value) reaches 94% of true detection with
2% of false alarms.
The seven Hu invariants and the thumb presence
indicator are used as attributes for the classification.
3 CLASSIFICATION TOOLS
3.1 Belief Functions
In this section, we briefly present the necessary
background on belief functions. For deeper
comprehension of these theories, see (Shafer, 1976)
and (Smets, 1994).
Let Ω be the set of N exclusive hypotheses
h
1
…h
N
. We call Ω the frame. Let m(.) be a belief
function on 2
Ω
(the powerset of Ω) that represents
our mass of belief in the propositions that
correspond to the elements of 2
Ω
:
[
]
:2 0,1m
Ω
→
()with () 1
A
AmA mA
⊆Ω
=
∑
(5)
Note that:
Belief can be assigned to non-singleton
propositions, which allows modeling the hesitation
between elements;
Ø belongs to 2
Ω
. A belief in Ø corresponds to
conflict in the model, throughout an assumption in
an undefined hypothesis of the frame or throughout
a contradiction between the information on which
the decision is made.
To combine several belief functions (each
associated to one specific captor) into a global belief
function (under associativity and symmetry
assumptions), one uses the conjunctive combination.
For N belief functions, m
1
…m
N
, defined on the same
frame Ω, the conjunctive combination is defined as:
12 ()
: ...
...
v
N
N
mm m m
Ω
ΩΩ Ω
(∩) (∩) (∩)
(∩) × × × →
∩
BB B B
(6)
(a) Binary hand shape
image.
(b) Hand polar parametric representation along the curvilinear abscissa τ (distance ρ and
angle θ). The thumb is within a peculiar distance and angle range (horizontal lines).
CUED SPEECH HAND SHAPE RECOGNITION - Belief Functions as a Formalism to Fuse SVMs & Expert Systems
7
with
B
Ω
being the set of belief functions defined on
Ω and m
(
∩
)
being the global combined belief
function. Thus, m
(
∩
)
is calculated as:
() ( )
1
()
...
1
2
v
N
N
nn
AA A
n
mA mA A
Ω
=∩∩
=
⎛⎞
=∀⊆
⎜⎟
⎝⎠
∑
∏
∩
(7)
The conjunctive combination means that, for
each element of the power set, its belief is the
combination of all the beliefs (from the N sources)
which imply it: the evidential generalization of the
logical AND.
After having fused several beliefs, the knowledge
in the problem is modeled via a function over 2
Ω
,
which expresses the potential hesitations in the
choice of the solution. In order to provide a
complete decision, one needs to eliminate this
hesitation. For that purpose, we use the Pignistic
Transform (Smets, 1994), which maps a belief
function from 2
Ω
onto Ω, on which a decision is easy
to make. The Pignistic Transform is defined as:
()
()
Ω∈∀
/−
=
∑
Ω⊂∈
h
A
Am
m
h
AAh ,
O1
1
)BetP(
(8)
where A is a subset of Ω, or equivalently, an element
of 2
Ω
, and |A| its cardinal when considered as a
subset of Ω.
This transform corresponds to sharing the
hesitation between the implied hypotheses, and
normalizing the whole by the conflictive mass.
As an illustration of all these concepts, let us
consider a simple example. Assume that we want to
automatically determine the color of an object. The
color of the object can be one of the primary colors:
red (R), green (G) or blue (B). The object is
analyzed by two sensors of different kind, any of
each giving an assumption of its color.
Table 1: Numerical example for belief function use.
∅
R
G
B
{R, G}
{R, B}
{B, G}
{R, G, B}
m
1
0 0.5 0 0 0.5 0 0 0
m
2
0 0 0 0 0 0 0.4 0.6
m
1
(∩) m
2
0.2 0.3 0.2 0 0.3 0 0 0
BetP
0
0.56
0.44 0 0 0 0 0
The observations of the sensors are
expressed as belief functions m
1
(.) and m
2
(.) and the
frame is defined as Ω
color
= {∅, R, G, B, {R, G}, {R,
B}, {B, G}, {R, G, B}} representing the hypothesis
about the color of the object. Then, they are fused
together into a new belief function via the
conjunctive combination. As the object has a single
color, the belief in union of colors is meaningless
from a decision making point of view. Hence, one
applies the Pignistic Transform on which a simple
argmax decision is made. This is summarized and
illustrated with numerical values in
Table 1.
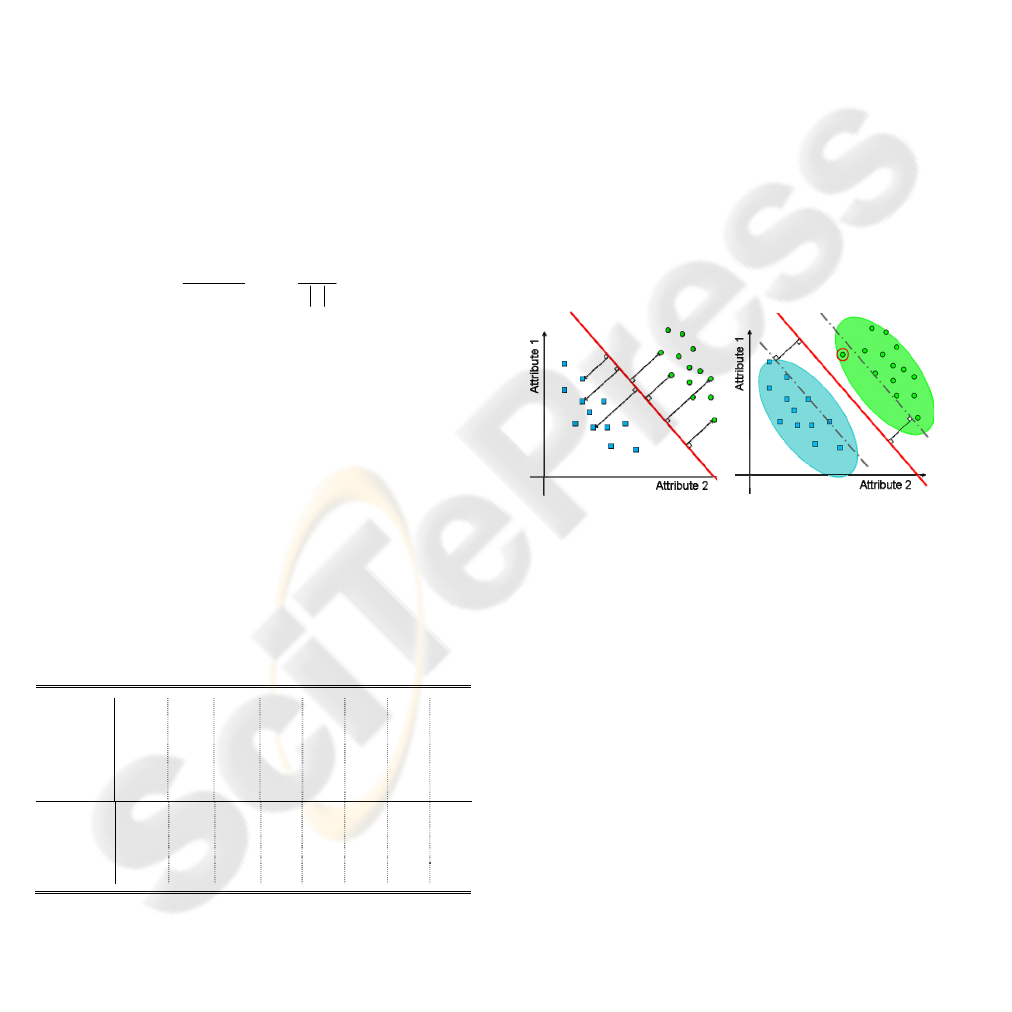
3.2 Support Vector Machines
SVMs (Boser, 1995), (Cortes, 1995) are powerful
tools for binary classification. Their purpose is to
materialize the correlation of the attributes for each
class by defining a separating hyperplane derived
from a training corpus, which is supposed to be
statistically representative of the classes involved.
The hyperplane is chosen among all the possible
hyperplanes through a complex combinatorial
problem optimization, so that it maximizes the
distance (called the margin) between each class and
the hyperplane itself (Figure 3a & Figure 3b).
(a) (b)
Figure 3: (a) combinatorial optimization of the hyperplane
position under the constraints of the training corpus item
positions. (b) The SVM provides good classification
despite the bias of the training.
To deal with the nine hand shapes in our
database, a multiclass classification with SVMs must
be performed. As SVMs are restricted to binary
classification, several strategies are developed to
adapt them for multiclass classification problems
(Hsu, 2002). For that purpose, we have developed a
scheme (Burger, 2006) which fuses the outputs of
the SVMs using the belief formalism, and which
provides a robust way of dealing with uncertainties.
The method can be summarized by the following
three steps:
(1) 36 SVMs are used to compare all the possible
class pairs among nine classes;
(2) A belief function is associated to each SVM
output, to model the partial knowledge brought by
the corresponding partial binary classification;
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
8
(3) The belief functions are fused together with a
conjunctive combination, in order to model the
complete knowledge of the problem, and to make a
decision according to its value.
4 DECISION SCHEME
4.1 Belief in the Thumb Presence
In order to fuse the information from the thumb
presence indicator with the output of the SVM
classifier, one needs to express it throughout a belief
function. As it is impossible to have a complete
binary certitude on the presence of the thumb (it is
possible to be misled at the thumb detection stage as
explained previously), we use a belief function
which authorizes hesitation in some cases.
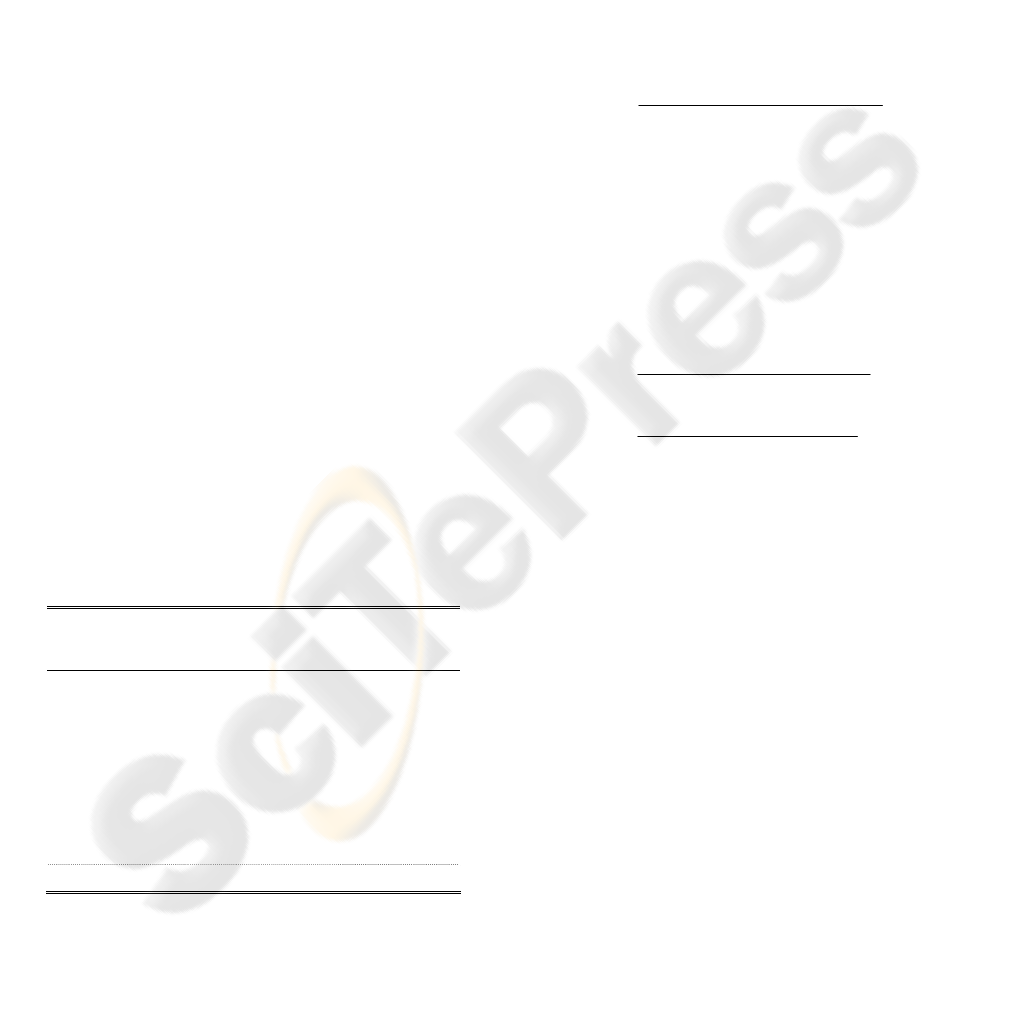
(a) (b)
Figure 4: (a) The peak height determines (b) the belief in
the presence of the thumb.
From an implementation point of view, we use a
technique based on fuzzy sets, as explained in Figure
4: The higher the peak of the thumb is, the more
confident we are in the thumb presence. This process
is fully supported by the theoretical framework of
belief functions, as the set of the finite fuzzy sets
defined on Ω is a subset of
B
Ω
(the set of belief
functions defined on Ω). Moreover, as belief
functions, fuzzy sets have peculiar properties which
make them really convenient to fuse with the
conjunctive combination (Denoeux, 2000).
The three values that define the support of the
hesitation in Figure 4b have been manually fitted
according to observations on the training set.
Making use of the "fuzziness" of the threshold
between the thumb presence and absence, these
values are not necessarily precisely settled. In
practice, they are defined via three ratios (1/5, 1/20
and 1/100) of the distance between the center of
palm and the furthest element from it of the contour.
Then, the belief in the presence of the thumb can
be associated to a belief in some hand shapes to
produce a partial classification: In hand shapes 0, 1,
2, 3, 4, and 8, there is no thumb, whereas it is visible
for shapes 5, 6 and 7. In case of hesitation in the
thumb presence, no information is brought and the
belief is associated to Ω.
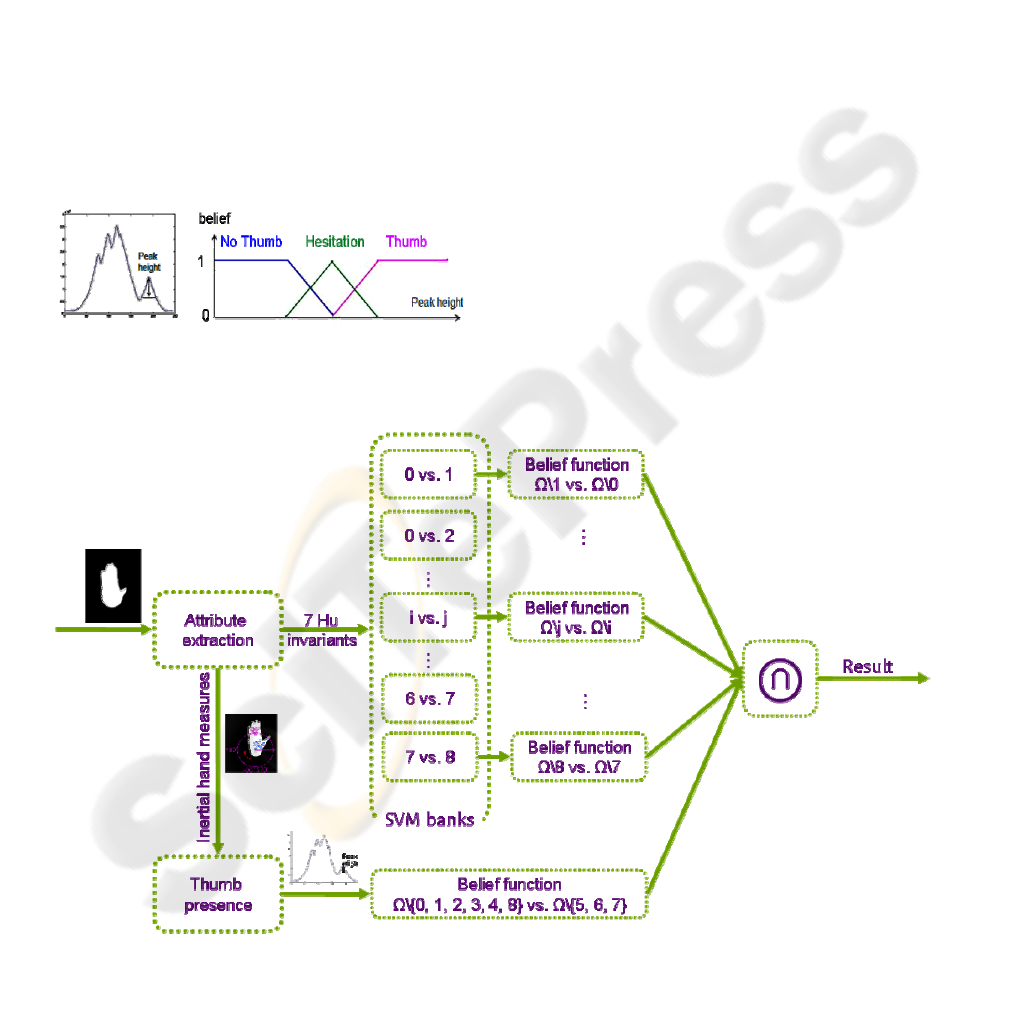
Figure 5: Global fusion scheme for hand shape classification.
CUED SPEECH HAND SHAPE RECOGNITION - Belief Functions as a Formalism to Fuse SVMs & Expert Systems
9
4.2 Partial Classification Fusion
Thanks to the evidential formalism, it is possible to
fuse partial information from various classifiers (36
SVMs and 1 expert system) through the conjunctive
combination (Figure 5). In that fashion, it is possible
to consider a SVM-based system and integrate it into
a wider data fusion system.
This fusion provides a belief function over the
powerset 2
Ω
of all the possible hand shapes Ω. This
belief is mapped over Ω via the Pignistic Transform,
to express our belief in each singleton element of Ω.
Then, the decision is made by an argmax function
over Ω.
()
*
argmax BetP(.)D
Ω
=
(9)
5 RESULTS
In this section, we present various results on the
methodology described above. In the first paragraph,
the database and the evaluation methods are
detailed. In the second paragraph, the experiments
and their corresponding results are given.
5.1 Database & Methodology
The hand shape database used in this work is
obtained from Cued Speech videos. The transition
shapes are eliminated manually and the remaining
shapes are labeled and used in the database as binary
images representing the 9 hand shapes (Figure 1).
Table 2: Details of the database.
Hand Shape
Corpus 1
(Training set)
Corpus 2
(Test set)
0
37 12
1
94 47
2
64 27
3
84 36
4
72 34
5
193 59
6
80 46
7
20 7
8
35 23
Total
679 291
The training and test sets of the database are
formed such that there is no strict correlation
between them. To ensure this, two different corpuses
are used in which a single user is performing two
completely different sentences using Cued Speech.
The respective distribution of the two corpuses is
given in Table 2. The statistical distribution of the
hand shapes is not balanced at all within each
corpus. The reason of such a distribution is related to
the linguistics of Cued Speech, and is beyond our
scope.
For all the experiments, Corpus 1 is used as the
training set for the SVMs and Corpus 2 is used as
the test set. As for each image, since the real labels
are known, we use the classical definition of the
accuracy to evaluate the performance of the
classifier:
Νumber Οf Well Classified Items
100
Τotal Νumber Οf Ιtems
Accuracy =⋅
(10)
To fairly quantify the performances of each
classification procedure, two indicators are used: (1)
The difference between the respective accuracies,
expressed in a number of point ΔPoint, and (2) the
percentage of avoided mistake %AvMis:
(
)()
_
2_1Point Accuracy Method Accuracy MethodΔ= −
()
Number of Avoided Mistakes
% 100
Total Number of Mistakes
100
100 _1
AvMis
Point
Accuracy Method
=⋅
Δ
=⋅
−
(11)
5.2 Experiments
The goal of the first experiment is to evaluate the
advantage of the evidential fusion for the SVM.
Thus, we compare the classical methods for SVM
multi-classification to the one of (Burger, 2006). For
both of the methods, the training is the same and the
SVMs are tuned with respect to the training set and
the thumb information is not considered.
For the implementation of the SVM functionalities,
we use the open source C++ library LIBSVM
(Chang, 2001). We use:
C-SVM, which is a particular algorithm to
solve the combinatorial optimization. The cost
parameter is set to 100,000 and termination criteria
to 0.001.
Sigmoid kernels in order to transform the
attribute space so that it is linearly separable:
(
)
,
(,) tanh
with 0.001 and 0.25
T
R
Ker u v u v R
R
γ
γ
γ
=⋅⋅+
==−
(12)
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
10
For the evidential method, we have made various
modifications on the software so that the SVM
output is automatically presented throughout the
evidential formalism (Burger, 2006). These
modifications are available on demand.
The results are presented in Table 3, as the test
accuracy of the classical voting procedure and the
default tuning of the evidential method. The
improvement in ΔPoint is worth 1.03 points and
corresponds to an avoidance of mistakes of
%AvMis = 11.11%.
Table 3: Results for experiments 1 & 2.
Evidential method
Classical
Voting
procedure
Default
(no thumb
detection)
With Thumb
Detection
Test
Accuracy
90.7% 91.8% 92.8%
The goal of the second experiment is to evaluate
the advantage of the thumb information. For that
purpose, we add the thumb information to the
evidential method. Thus, the training set is used to
set the two thresholds, which defines the possible
distance with respect to the center of palm.
However, the thumb information is not used during
the training of the SVMs as they only work on the
Hu invariants, as explained in Figure 5. The results
with and without the thumb indicator are presented
in Table 3.
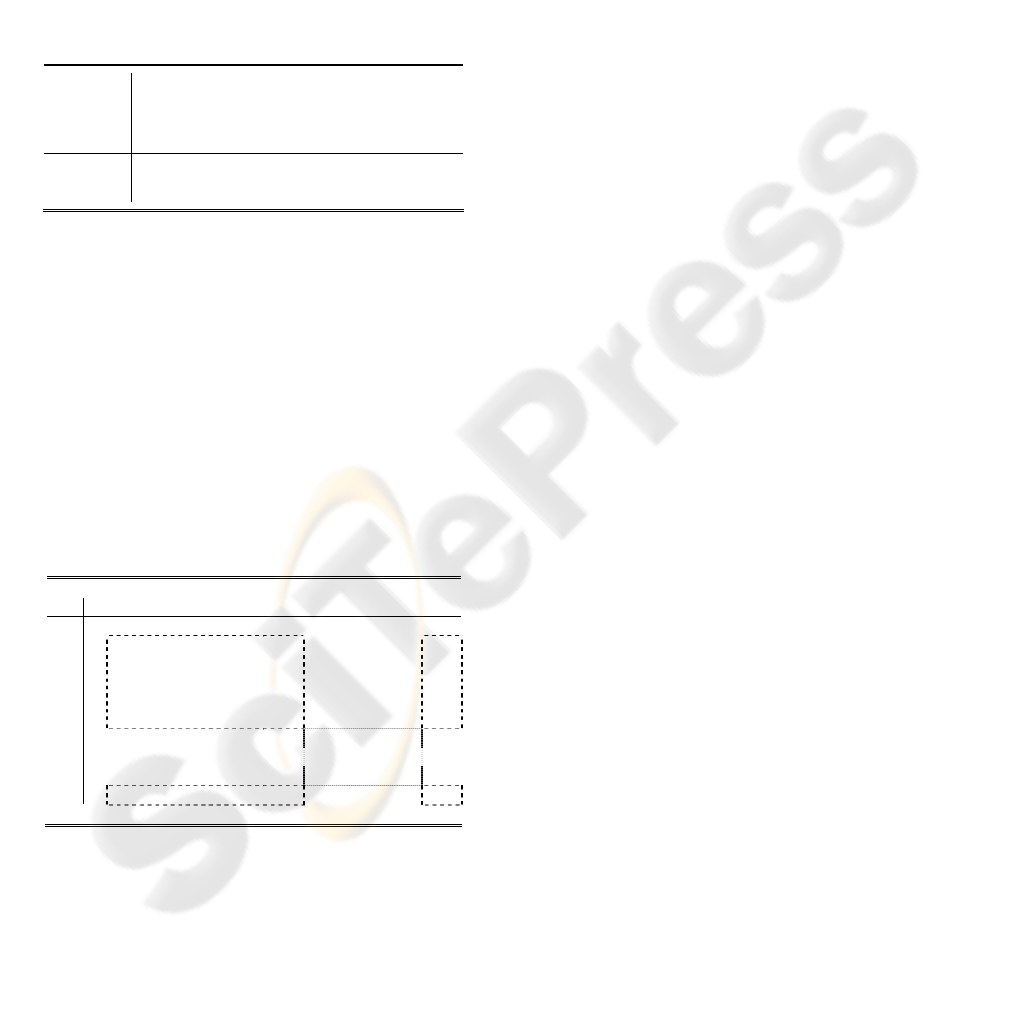
Table 4: Confusion matrix for the second method on
Corpus 2, with the Thumb and NoThumb superclasses
framed together.
0 1 2 3 4 5 6 7 8
0
12 0 0 0 0 0 0 0 0
1
0 46 0 0 0 0 0 0 1
2
0 2 23 2 0 0 0 0 0
3
0 2 0 29 2 2 1 0 0
4
0 0 0 1 32 0 0 0 1
5
0 0 0 0 0 58 0 1 0
6
0 0 2 0 0 0 41 3 0
7
0 0 0 0 0 0 1 6 0
8
0 0 0 0 0 0 0 0 23
The evidential method that uses the thumb
information provides an improvement of 2.06 points
with respect to the classical voting procedure, which
corresponds to an avoidance of 22.22% of the
mistakes. Table 4 presents the corresponding
confusion matrix for the test set: Hand shape 3 is
often misclassified into other hand shapes, whereas,
on the contrary, hand shape 1 and 7 gather a bit
more misclassification from other hand shapes.
Moreover, there are only three mistakes between
THUMB and NO_THUMB super-classes.
6 CONCLUSION
In this paper, we propose to apply a belief-based
method for SVM fusion to hand shape recognition.
Moreover, we integrate it in a wider classification
scheme which allows taking into account other
sources of information, by expressing them in the
Belief Theories formalism. The results are better
than with the classical methods (more than 1/5 of the
mistakes are avoided) and the absolute accuracy is
high with respect to the number of classes involved.
ACKNOWLEDGEMENTS
This work is the result of a cooperation supported by
SIMILAR, European Network of Excellence
(www.similar.cc).
REFERENCES
Aran, O., Keskin, C., Akarun, L., 2005. Sign Language
Tutoring Tool, EUSIPCO’05, Antalya, Turkey.
Burger , T., Aran, O., and Caplier, A., 2006. Modeling
hesitation and conflict: A belief-based approach, In
Proc. ICMLA.
Boser, B., Guyon, I., and Vapnik, V., 1995. A training
algorithm for optimal margin classifiers, In Proc. Fifth
Annual Workshop on Computational Learning Theory.
Capelle, A. S., Colot, O., Fernandez-Maloigne, C., 2004.
Evidential segmentation scheme of multi-echo MR
images for the detection of brain tumors using
neighborhood information. Information Fusion,
Volume 5, Number 3, pages 203-216.
Caplier, A., Bonnaud, L., Malassiotis, S., and Strintzis,
M., 2004. Comparison of 2D and 3D analysis for
automated Cued Speech gesture recognition,
SPECOM, St Petersburg, Russia.
Chang , C.-C., and Lin, C.-J., 2001. LIBSVM: a library
for support vector machines. Software available at
http://www.csie.ntu.edu.tw/~cjlin/libsvm
Cornett, R. O., 1967. Cued Speech, American Annals of
the Deaf.
Cortes, C., and Vapnik, V., 1995. Support-vector network,
Machine Learning 20, 273–297.
Denoeux, T., 2000. Modeling vague beliefs using fuzzy-
valued belief structures. Fuzzy Sets and Systems,
116(2):167-199.
CUED SPEECH HAND SHAPE RECOGNITION - Belief Functions as a Formalism to Fuse SVMs & Expert Systems
11

Derpanis, K. G., 2004. A review on vision-based hand
gestures, internal report.
Hsu, C.-W., and Lin, C.-J., 2002. A comparison of
methods for multi-class support vector machines,
IEEE Transactions on Neural Networks, Vol. 13, pp.
415-425.
Norkin, C.C., and Levangie , P.K., 1992. Joint structure
and function. (2nd ed.). Philadelphia: F.A. Davis.
Ong, S.C.W. and Ranganath, S., 2005. Automatic Sign
Language Analysis: A Survey and the Future beyond
Lexical Meaning, IEEE Transactions on Pattern
Analysis and Machine Intelligence, vol. 27, pp. 873-
891.
Pavlovic, V., Sharma ,R. and Huang , T. S., 1997. Visual
Interpretation of Hand Gestures for Human-Computer
Interaction: A Review, IEEE Transactions on Pattern
Analysis and Machine Intelligence, vol. 19, n. 7,
p. 677-695.
Quost, B., Denoeux, T., and Masson, M.-H., 2007.
Pairwise classifier combination using belief functions.
To appear in Pattern Recognition Letters.
Shafer, G., 1976. A Mathematical Theory of Evidence,
Princeton University Press.
Smets, P., and Kennes, R., 1994. The transferable belief
model. Artificial Intelligence, 66(2): 191–234.
Wu, Y., Huang, T.S., 2001. Hand modeling, analysis, and
recognition for vision based Human-Computer
Interaction, IEEE Signal Processing Magazine, v.21,
p.51–60.
Zhang, D., and Lu, G., 2003. Evaluation of MPEG-7 shape
descriptors against other shape descriptors, Multimedia
Systems, vol. 9, issue 1.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
12
