
MULTI-RESOLUTION BLOCK MATCHING MOTION ESTIMATION
WITH DEFORMATION HANDLING USING GENETIC
ALGORITHMS FOR OBJECT TRACKING APPLICATIONS
Harish Bhaskar and Helmut Bez
Loughborough University, U.K.
Keywords:
Block motion estimation, affine, deformation handling, genetic algorithms, multi-resolution, object tracking.
Abstract:
Motion Estimation is a popular technique for computing the displacement vectors between objects or attributes
between images captured at subsequent time stamps. Block matching is a well known technique of motion
estimation that has been successfully applied to several applications such as video coding, compression and
object tracking. One of the major limitations of the algorithm is its ability to cope with deformation of objects
or image attributes within the image. In this paper we present a novel scheme for block matching that combines
genetic algorithms with affine transformations to accurate match blocks. The model is adapted into a multi-
resolution framework and is applied to object tracking. A detailed analysis of the model alongside critical
results illustrating its performance on several synthetic and real-time datasets is presented.
1 INTRODUCTION
Motion estimation techniques aim at deducing
displacement vectors for objects or image attributes
between two consecutive frames (A. Gyaourova
and Cheung, 2003). The main idea behind block
matching motion estimation strategies is to divide the
image frame into blocks and match blocks between
successive frames within a search window using
specific search techniques (A.Barjatya, 2005). It is
clear that the two distinct phases that make up any
block matching method is block partitioning and
block searching. The block partitioning scheme is
concerned with dividing the original image frame
into non-overlapping regions. Block partitioning can
be performed using the fixed size or variable size
methods (C-C.Chang, 2006) (F.J.Ferri and J.Soret,
1998). The block search mechanism is the process
of locating the block in the destination frame that
best matches the block in the anchor frame using a
specific matching criterion (Turaga and M.Alkanhal,
1998).
Different models have been developed in litera-
ture to accomplish robust motion estimation using
block based techniques. (C-W.Ting and L-M.Po,
2004) propose the use of different search schemes
with fixed and variable block partitioning methods
to accomplish robust estimation. In a similar study
by (M.Wagner and D.Saupe, 2000), a quad-tree
block motion estimation scheme is proposed. Other
methods of variable block matching have also been
proposed, particularly in the form of polygon ap-
proximation, mesh based (Y.Wang and O.Lee, 1996)
and binary trees. Another class of block matching
methods that have recently used for deformation
handling particularly in applications of object track-
ing is the deformable block matching (O.Lee and
Y.Wang, 1995). In a study by (J.H.Velduis and
G.W.Brodland, 1999), deformable block matching
has been adapted for use in tracking cell particles. A
bilinear transformation is used with block matching
to handle deformation. In the context of deformable
models,triangular or mesh based block decomposi-
tion is much popular (Y.Wang and A.Vetro, 1996).
The idea behind these schemes is to partition image
frames using techniques of finite element analysis,
triangulation (M.Yazdi and A.Zaccarin, 1997), mesh
grid etc. and employ deformable block matching
of vertex points to handle complex motion changes
during motion estimation. In the context of mesh
based methods, a nodal based scheme for block
169
Bhaskar H. and Bez H. (2007).
MULTI-RESOLUTION BLOCK MATCHING MOTION ESTIMATION WITH DEFORMATION HANDLING USING GENETIC ALGORITHMS FOR OBJECT
TRACKING APPLICATIONS.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 169-174
DOI: 10.5220/0001650501690174
Copyright
c
SciTePress

matching is also popular. According to the nodal
scheme, mesh is generated such that nodes lies
across object boundaries and a simple search of
linear motion of these nodal position from the anchor
frame to the destination frame will be able to suffice
deformation (O.Lee and Y.Wang, 1995). In this
paper, we shall highlight a framework that integrates
a vector quantization based block partitioning method
to an genetic algorithm based search scheme with
affine parametrization to accomplish robust, accurate
motion estimation with deformation handling. The
model is built on a multi-resolution platform with
performance feedback.
2 PROPOSED MODEL
The proposed model constitutes of different phases.
The first phase is the multi-resolution platform that
the framework is based on. The platform combines
a scale space representation of data with a multi-
resolution level analysis. A multi-resolution model
aims at capturing a wide range of levels of detail of an
image and can in-turn be used to reconstruct any one
of those levels on demand. The distinction between
different layers of an image is determined by the res-
olution. A simple mechanism of tuning the resolution
can add finer details to coarser descriptions providing
a better approximation of the original image. Mathe-
matically, we can represent the above analysis in the
following way. If the resolution is represented using
λ, then the initial level is associated with λ = 0 is 1
and that with any arbitrary resolution λ is
1
2
λ
. If f
λ
is
the image at resolution λ, then at resolution λ+1,
f
λ+1
= f
λ
+ Γ
λ
(1)
where Γ
λ
is the details at resolution λ. In con-
trast, the scale space representation of data deals with
representing images in such a way that the spatial-
frequency localizations are simultaneously preserved.
This is achieved by decomposing images into a set
of spatial-frequency component images. Scale space
theory, therefore, deals with handling image struc-
tures at different scale such that the original image can
be embedded into a one-parameter family of derived
component images thereby allowing fine-scale struc-
tures to be successively suppressed.Mathematically,
to accomplish the above, a simple operation of con-
volution can be used. However, it is important to
note that the overhead of using the convolution op-
erator is kept low. For any given image I(x, y), its
linear scale space representation is composed of com-
ponents L
ϑ
(x, y) defined as a convolution operator of
the image I(x, y) and a Gaussian kernel of the form:
G
ϑ
(x, y) =
1
2πϑ
e
−
x
2
+y
2
2ϑ
(2)
, such that
L
ϑ
(x, y) = G
ϑ
(x, y) ∗ I(x, y) (3)
where ϑ = σ
2
is the variance of the Gaussian. Per-
formance based feedback automates the selection of
relevant resolution and scale for any particular frame
pair. A brief algorithm describing the process is as
follows.
• Initialize the resolutions λ
[1:q]
to [0, 1, 2, ..., q] and
scales ϑ
[1:q]
to [1, 2, 3, ..., q + 1] for any value of
q (4 chosen for this experiment).
• Select the median of resolutions as the initial start-
ing resolution and scale. The median is 2 in our
experiments and the chosen values of (λ, ϑ) are
(2, 3)
• Input at any time instant t, two successive frame
pairs of a video sequence, (f
t
, f
t+1
).
• Re-sample the images f
t
and f
t+1
into the se-
lected resolution using bi-cubic interpolation
• Convolve the image at selected scale (in matching
positions with the resolution) with a Gaussian ker-
nel to obtain a filtered output (G
ϑ
∗ f
t
, G
ϑ
∗ f
t+1
)
• Perform Motion Estimation of these input images
at this scale-resolution using the motion estima-
tion algorithm specified in the subsection below
and reconstruct the target frame using the esti-
mated motion parameters.
• Evaluate the performance of the model using
the metrics: PSNR, Entropy and Time as in
(H.Bhaskar and S.Singh, 2006)
• If the frame pair processed is (f
t
, f
t+1
) at t = 1
then automatically slide up to a higher resolution
and repeat process by incrementing t. Otherwise,
if t > 1 then if P SNR
t
> P SNR
t−1
then slide
down to lower resolution - scale otherwise slide
up to higher resolution - scale combination.
• Repeat the process for all frame pairs
The second phase of the algorithm deals with
motion estimation. For the purpose of motion
estimation we extend the technique of deformable
block matching that combines the process of block
partitioning, block search and motion modeling. A
vector quantization based block partitioning scheme
is combined with a genetic algorithm based search
method for robust motion estimation (H.Bhaskar
and S.Singh, 2006). We extend the basic model in
such a way that block deformation is handled using a
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
170

combined genetic algorithm affine motion model.
The block partitioning phase remains unchanged
while the genetic algorithm based block search
scheme is altered to include the affine transforma-
tions. In the subsection below, a detailed algorithm of
the modified block search scheme based on genetic
algorithm and affine transforms is presented.
2.1 Vector Quantization Based Block
Partitioning
The vector quantization scheme for block partitioning
illustrated in (H.Bhaskar and S.Singh, 2006) has been
used in the proposed deformable block matching. It
is important to realize that the image frames f
t
and
f
t+1
that is input to this stage of the algorithm refers
to the filtered output of the previous stage. According
to the vector quantization scheme, image frames are
partitioned based on the information content present
within them. The model separates regions of inter-
est based on clustering and places a boundary sep-
arating these regions. For this, the vector quantiza-
tion mechanism uses the gray level feature attributes
for separating different image regions and the center
of mass of different intersection configurations is em-
ployed to deduce the best partition suitable for the im-
age frames.
2.2 Affine-Genetic Algorithm Motion
Model
The idea behind the genetic algorithm affine motion
model combination is to use the affine transformation
equation on every block during fitness function eval-
uation. The algorithm for the block search scheme is
as follows.
The genetic algorithm based block matching al-
gorithm described below is used to match the
centroid of any block from the partitioned structure
of frame f
t
to its successive frame f
t+1
at different
angles theta and parameters shear and scale. The
inputs to the genetic algorithm are the block b
t
and
the centroid (x
c
, y
c
) of the block.
• Parameter Initialization: The variable parameters
of the genetic algorithm will be the genes in the
chromosomes. In our experiments they will be
the the pixel displacement value in x and y direc-
tions, the angle theta of the input block, the shear
factor s and scale (r
x
, r
y
) are encoded as the chro-
mosome (T
x
, T
y
, θ, s, r
x
, r
y
). The translation, ro-
tation and scale parameters of the model are ini-
tialized using the phase correlation and log-polar
Figure 1: Phase Correlation.
transforms. This speeds up the genetic algorithm
search scheme and also increases the accuracy of
estimation.
– Translation parameters using phase correlation:
The phase correlation technique is a frequency
domain approach to determine the translative
movement between two consecutive images. A
simple algorithm illustrating the process of de-
termining an approximate translative motion
characteristics between two images is as fol-
lows.
∗ Consider the input block b
t
and its corre-
sponding block at the successive frame b
t+1
∗ Apply a window function to remove edge ef-
fects from the block images
∗ Apply a 2D Fourier transform to the im-
ages and produce F
t
= Ψ(b
t
) and F
b+1
=
Ψ(b
t+1
); where ψ is the Fourier operator.
∗ Compute the complex conjugate of F
t+1
,
multiply the Fourier transforms element-wise
and normalize to produce a normalized cross
power spectrum N P S using
NP S =
F
t
F
∗
t+1
|F
t
F
∗
t+1
|
(4)
∗ Apply inverse Fourier transform on the nor-
malized power spectrum to obtain P S =
ψ
−1
(NP S); where ψ
−1
is the inverse Fourier
operator.
∗ Determine the peak as the the translative co-
ordinates using
(∆x, ∆y) = argmax(P S) (5)
∗ An illustration describing the process of phase
correlation using a sample image is as shown
in Figure 1.
– Rotation and Scale using Log-Polar Trans-
forms: The log-polar transform is a conformal
mapping of points on cartesian plane to points
on the log-polar plane. The transformation can
accommodate an arbitrary rotations and a range
of scale changes. If an block image in the carte-
sian plan is represented using b(x, y), then the
log polar transform of the block image with ori-
gin O at location (x
o
, y
o
) is
MULTI-RESOLUTION BLOCK MATCHING MOTION ESTIMATION WITH DEFORMATION HANDLING USING
GENETIC ALGORITHMS FOR OBJECT TRACKING APPLICATIONS
171

Figure 2: Log Polar Transform.
b
∗
(ψ, φ) = bξ(x, y) (6)
where,
ψ = M log(r + α), α is any constant
r =
p
(x − x
o
)
2
+ (y − y
o
)
2
and
φ = tan
−1
y −y
o
x−x
o
In order to determine the approximate values
of rotation and scale using the log-polar trans-
forms, we convert the image frames into the log
polar domain and then use phase correlation be-
tween the log-polar images to identify the rota-
tion and scale parameters as in Figure 2.
• Population Initialization: A population P of these
n chromosomes representing (T
x
, T
y
, θ, s, r
x
, r
y
)
is generated from uniformly distributed random
numbers where,
– 1 ≤ n ≤ limit and limit (100) is the maxi-
mum size of the population that is user defined.
– The values of pre-initialized parameters such as
translational, rotational and scale are generated
within a small range of their initial value.
• To evaluate the fitness E(n) for every chromo-
some n:
– Extract the pixels locations corresponding to
the block from frame f
t
using the centroid
(x
c
, y
c
) and block size information
– Affine Transforming these pixels using the
translation parameters (T
x
, T
y
), rotation angle
θ, shear factor s and scale r
x
, r
y
using,
x
′
y
′
1
=
1 s 0
0 1 0
0 0 1
r
x
0 0
0 r
y
0
0 0 1
cosθ −sinθ 0
sinθ cosθ 0
0 0 1
1 0 T
x
0 1 T
y
0 0 1
x
y
1
– If b
t
represents the original block under consid-
eration, b
∗
t+1
represents the block identified at
the destination frame after transformation and
(h, w) the dimensions of the block, then the fit-
ness E can be measured as the mean absolute
difference (MAD).
MAD =
1
hw
h
X
i=1
w
X
j=1
b
t
(i, j) − b
∗
t+1
(i, j)
(7)
Figure 3: 2D Deformable Block Matching.
• Optimization: Determine the chromosome with
minimum error n
emin
= n where E is mini-
mum. As this represents a pixel in the block,
determine all the neighbors (N H
k
) of the pixel,
where 1 ≤ k ≤ 8.
– For all k, determine the error of matching as in
Fitness evaluation.
– If E(N H
k
) < E(n
emin
), then n
emin
= NH
k
• Selection: Define selection probabilities to select
chromosomes for mutation or cloning.
• Cross-Over: All chromosomes n
cr
that are cho-
sen for cross-over are taken into the next gener-
ation after swapping one or more random genes
between every successive chromosome.
• Mutation: All Chromosomes n
mu
chosen for mu-
tation are replaced with uniformly distributed ran-
dom values for centroid, angle, shear, scale and
squeeze.
• Termination: Three termination criterion are
specified in the proposed model. Check if any
condition is satisfied, otherwise iterate until ter-
mination.
– Zero Error: If a chromosome returned an error
value zero through fitness evaluation, Or
– Maximum Generations: If the number of gener-
ations (i.e. process loops) exceeds a predefined
threshold, Or
– Stall Generations: If the number of stall gen-
erations (i.e. process loops where there is no
change in the fitness values) exceeds a prede-
fined threshold.
3 RESULTS AND ANALYSIS
Detailed results and analysis of the proposed model is
presented in this section of the paper. On the second
part of this section we demonstrate how the motion
estimation scheme is adapted to object tracking appli-
cations.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
172
1 2 3 4 5 6
13.5
14
14.5
15
15.5
16
16.5
17
17.5
Time Compexity Plot
Video Number
Time Taken Per Frame Pair
VBMA with Affine Parametrization
1 2 3 4 5 6
7
7.5
8
8.5
9
9.5
10
10.5
11
11.5
12
Video Number
Time Taken Per Frame Pair
Time Complexity Plot
DVQBMA
1 2 3 4 5 6
29
29.5
30
30.5
31
31.5
32
32.5
33
33.5
34
Video Number
PSNR Values (dB)
Variable Block Matching with Affine Parametrization
1 2 3 4 5 6
30
30.5
31
31.5
32
32.5
33
33.5
34
34.5
35
Video Number
PSNR Values (dB)
PSNR Plot
DVQBMA
1 2 3 4 5 6
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
Video Number
Relative Entropy
Variable Block Matching with Affine Parametrization
1 2 3 4 5 6
0
0.02
0.04
0.06
0.08
0.1
0.12
Video Number
Relative Entropy
Entropy Plot
DVQBMA
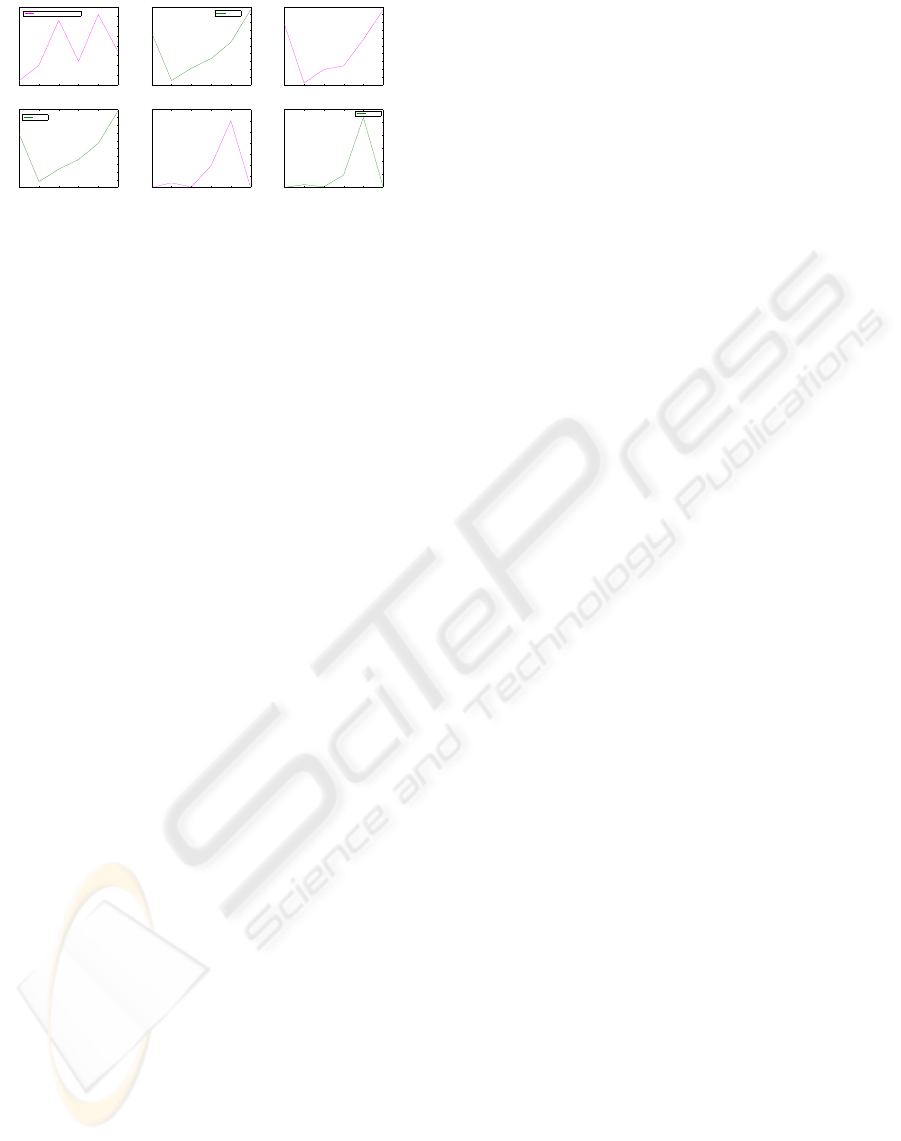
Figure 4: Performance Comparison of Proposed Model to
Baselines.
3.1 Performance Evaluation of Motion
Estimation
In Figure 3 we illustrate the stages of the proposed
block matching scheme. The first and the second im-
ages illustrate the original frame and the transformed
frame of a sample synthetic image. Through the
other images we illustrate how the genetic algorithm
is used to identify the optimal motion parameters.
Different configurations are evolved through increas-
ing generations getting the solution closer to optimal.
The red block represents the objects original position
in the anchor frame and the green boundary specifies
the location of the block during block searching using
genetic algorithm at different generations. To further
affirm the performance of the model on different
real time datasets, we perform experiments of the
model on 6 different video data each containing
around 40 frames. The averaged performances on
each videos are measured using time, relative entropy
and PSNR metrics and compared to the baseline
model in Figure 4. The baseline model uses affine
parametrization with other search schemes on a
variable block partitioned data. We also compare the
proposed model against the original block matching
model that does not handle deformation and a rotation
invariant model.
It is very evident that the averaged time complex-
ity of the proposed motion estimation mechanism that
handles deformation still does not match the require-
ments of real-time. However, with a multi-resolution
optimization approach it might well be possible to im-
prove the time efficiency. The results compare well
with the quad-tree block matching mechanism with
affine parametrization. There is a clear advantage in
using the proposed strategy for deformation handling
than an extension to any other variable block parti-
tioning scheme with sub-optimal search. The qual-
ity of motion estimation is recorded and compared in
the graphs. It can be observed that there is clear im-
provement in the quality of motion estimation when
deformation of objects is handled during motion es-
timation. In comparison to the baseline model, there
is clear increase of about 2dB in the PSNR values. A
clear increase in the PSNR values can be noted dur-
ing the progressive improvements in the model from
the basic framework to the rotation invariant model
and finally to the deformation handling model. This
clearly indicates how useful deformation handling is
during motion estimation. A very similar trend can
also be visualized between different models when
compared against the performance metric of relative
entropy. The reconstructions made from the defor-
mation handling model match closer to the expected
outcome of the image frame. This highlights the ac-
curacy and robustness of the strategy in accomplish-
ing motion estimation. In comparison to the baseline
model there is a clear improvement in the values of
relative entropy.
3.2 Object Tracking Applications
In this section we describe how the motion estima-
tion mechanism above can be adapted to object track-
ing applications and also analyze how the efficiency
of motion estimation influences the quality of object
tracking. We have extended the model for application
in object tracking through simple clustering of fea-
tures characteristics including motion information. To
use the proposed model into object tracking motion
vectors are clustered such that the moving group of
blocks possessing similar motion and feature charac-
teristics will form the object of interest. Trajectories
are plotted using the center of mass location of the
blocks that constitute the objects. We have tested the
approach on a number of different datasets. We have
displayed the results of the model on some of them.
Figure 5 illustrates the motion trajectory (represented
using red dots) of a single/multiple object tracked
over different time stamps. As the model does not
perform object segmentation, produces a number of
small unwanted trajectories that have been removed
through manually entered semantic information. The
semantic information can be of the form of velocity
information of the object in motion, color of the mov-
ing objects etc. We have in our experiments displayed
the motion trajectory of the group of blocks that have
been tracked longest on the image sequences. Gener-
ally in any scene this information corresponds to the
object of interest. The first two images are the tra-
jectories of the proposed model and a polygon shape
feature based nearest neighbor tracking scheme pro-
posed in (H.Bhaskar and S.Singh, 2005). As it can be
clearly observed the trajectory of the baseline model
MULTI-RESOLUTION BLOCK MATCHING MOTION ESTIMATION WITH DEFORMATION HANDLING USING
GENETIC ALGORITHMS FOR OBJECT TRACKING APPLICATIONS
173

Figure 5: Object Trajectory of Sample Video Sequences.
disintegrates once the object has complex deforma-
tion whereas the proposed scheme continues to handle
deformation reliably for the entire video. The main
reason to this is that the model relies on image seg-
mentation and polygon based shape approximation.
The second group of 3 images illustrate the tracking
of multiple objects in an image sequence. This se-
quence is also an example of a very noisy sequence
with most of its background moving as well. Finally,
examples of human tracking are also illustrated. In
the first, we have extracted the trajectory of the body
of the person moving and displayed it. The model ac-
tually produces different trajectories for moving parts
of hands, legs, face etc. as in the next image. The
second image is the output of the shape feature based
baseline model. Again the technique fails to track ob-
jects immediately after a complex deformation is no-
ticed.
4 CONCLUSION
In this paper we presented a novel deformation han-
dling mechanism for block matching based on ge-
netic algorithm that can be extended for use in ob-
ject tracking applications. The model combines the
vector quantization based variable block partitioning
and applies an affine based genetic algorithm match-
ing scheme for block matching. We have also pre-
sented results on several real time datasets to illus-
trate the proof of concept. Analysis of the results on
the model has proved that the model is robust and re-
liable for tracking deformational changes in objects in
video sequences.
REFERENCES
A. Gyaourova, C. K. and Cheung, S.-C. (2003). Block
matching for object tracking. Technical report,
Lawrence Livermore Nation Laboratory.
A.Barjatya (2005). Block matching algorithms for motion
estimation. Technical report.
C-C.Chang, L-L.Chen, T.-S. (2006). Multi-resolution based
motion estimation for object tracking using genetic al-
gorithm. In VIE Conference.
C-W.Ting, W.-H. and L-M.Po (2004). Fast block matching
motion estimation by recent-biased search for multi-
ple reference frames. In International Conference on
Image Processing (ICIP).
F.J.Ferri, J. J. and J.Soret (1998). Variable-size block
matching algorithm for motion estimation using a
perceptual-based splitting criterion. In International
Conference on Pattern Recognition (ICPR), page 286.
H.Bhaskar and S.Singh (2005). Multiple particle tracking in
live cell imaging using green fluorescent protein (gfp)
tagged videos. In International Conference on Ad-
vances in Patter Recognition, pages 792–803.
H.Bhaskar, R. and S.Singh (2006). A novel vector quan-
tization based block matching strategy using genetic
algorithm search. Submitted to Pattern Recognition
Letters.
J.H.Velduis and G.W.Brodland (1999). A deformable
block-matching algorithm for tracking epithelial cells.
In Image and Vision Computing, pages 905–911.
M.Wagner and D.Saupe (2000). Video coding with
quadtrees and adaptive vector quantization. In Pro-
ceedings EUSIPCO.
M.Yazdi and A.Zaccarin (1997). Interframe coding using
deformable triangles of variable size. In International
Conference on Image Processing, page 456.
O.Lee and Y.Wang (1995). Motion compensated predic-
tion using nodal based deformable block matching.
In Visual Communications and Image Representation,
pages 26–34.
Turaga, D. and M.Alkanhal (1998). Search algorithms for
block-matching in motion estimation.
Y.Wang and O.Lee (1996). Use of 2d deformable mesh
structures for video compression, part i - the synthe-
sis problem: Mesh based function approximation and
mapping. In IEEE Trans. Circuits and Systems on
Video Technology, pages 636–646.
Y.Wang, O. and A.Vetro (1996). Use of 2d deformable mesh
structures for video compression, part ii - the analysis
problem and a region-based coder employing an active
mesh representation. In IBID, pages 647–659.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
174
