
NONLINEAR FUZZY SELFTUNING PID CONTROL
TECHNOLOGY AND ITS APPLICATIONS IN AUTOMATED
PROGRAMMING ROBOTICS
Ganwen Zeng
Data I/O Corporation, 6464 185
th
Ave NE, Readmond, WA 98052, USA
Qianglong Zeng
Dartmouth University, Hanover, NH, 03755, USA
Keywords: Fuzzy control, Fuzzy sets, Fuzzy self-tuning control, Fuzzy PID control, Robotics, Distributed control,
Programming systems, Control algorithm, Control system, DSP, ADC/DAC, Servo motor control, FPGA,
Microcontrollers, PowerPC, ARM9, COM, CAN, ETHERNET, Multi-core architectures, Embedded control
system, Bios, RTOS, kernel, OOP, Nested ISR, Fast IO, Firmware, Embedded software, Control
applications, Programming technology, ONFI (Open NAND Flash Interface), Flash devices, Flash cards,
Flash disks, USB2.0 host/Flash Media Controller for SmartMedia (SM), xD, CF, MS, SD and
MultimediaCard (MMC).
Abstract: The paper presents an advanced Fuzzy self-tuning PID controller theory and it implement its applications on
Data I/O’s automated robotic programming systems. Considerable programming technology shift occurred
in recent device programmer industry; programming density have been constantly fast growing from low-
volume to high-volume programming for all kinds of non-volatile flash memory devices such as NOR flash,
NAND flash, and MMC cards, SD flash cards, serial flash device, serial flash cards, flash-based
microcontrollers and flash disks as high performance M-systems DiskOnChip. Device programming mode
is more demanding an automatic programming than manual operation mode. It drives the creation and
implementation of a high-performance automated programming robotic systems. This paper shows how this
proposed advanced Fuzzy self-tuning PID controllers work on these automated programming robotic
automation systems.
1 INTRODUCTION
Automated programming systems available today
are able to fully automate device programming and
to fully integrate programming testing, how to
obtain a high control performance and good control
system stability in these automated robotic system is
one key of the success in long-term device
operations in the programmer systems. It improves
the productivity, quality and flexibility of a
semiconductor production process.
High performance motor motion control precision
and high level of integration is continuously
increasing, and the clear trend is towards completely
integrated intelligent programming system. This
paper describes an embedded intelligent
programming automation system. The robotic
automated programmer system is shown in the
Figure 1.
The robotic automated programmer system is
implement in multiple microcontrollers, DSP and
embedded processors, for an complex control
motion and control task control, a multi-core
architecture is used for a high-performance motion
control and optimal marshalling control of multiple
control tasks. The multi-core can easily assist a
control task marshalling that implements a task-on-
task control communication. The control block
diagram of the robotic automated programmer
system is shown in the Figure 2.
372
Zeng G. and Zeng Q. (2007).
NONLINEAR FUZZY SELFTUNING PID CONTROL TECHNOLOGY AND ITS APPLICATIONS IN AUTOMATED PROGRAMMING ROBOTICS.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 372-375
DOI: 10.5220/0001647303720375
Copyright
c
SciTePress

Figure 1: Data I/O FLX500.
The robotic automated programmer system is
implement in multiple microcontrollers, DSP and
embedded processors, for an complex control
motion and control task control, a multi-core
architecture is used for a high-performance motion
control and optimal marshalling control of multiple
control tasks. The multi-core can easily assist a
control task marshalling that implements a task-on-
task control communication. The control block
diagram of the robotic automated programmer
system is shown in the Figure 2.
It is composed of one host commander and two
main motion control subsystems DPCS (Device
Positioning Control System) and DIOC (Device
Input Output Control System). The DPCS is
composed by 5 control units of robotic task space
configuration, X-gantry motion robotic control, y-
gantry motion robotic control, head dynamic motion
control, head rotation robotic control, device pick-
and-place robotic control. The DIOC is composed
by two control units of device feeding tape control
and device transportation belt motion control.
Synchronous communications can rely on the bus
Ethernet and TCP/IP protocol in a multi-core
architecture.
Figure 2: Control Block Diagram of Data I/O FLX500.
Asynchronous communications between the
host commander and the motor control systems for
the Nonlinear and Linear Brushless Servo Motors,
AC Speed Motors with fractional HP, and
Piezoelectric motors can be based on the TouCAN
bus or Motorola 68376 Com Ports to guarantee the
space loop closure for the main axes of the robotic
control system. Based on the CAN architectures, a
disturbed intelligent control structures is proposed in
this multiple robotic axis configurations in the
programmer automation system. This means the use
of single-axis intelligent DSP motion controllers for
both DPCS and DIOC which can handle local
robotic axis control function independently from the
multi-core processor host. Robust real-time OS
kernel codes are used into the controllers to
implement optimal interrupt service routines, fast
IO, multi-threading, PWM generating units, current
and motor torque control, speed/position control,
and fuzzy control self-tuning PID control algorithms
and integrated robotic motion solutions. Simulation
has been done in LabVIEW 7.0 Professional
Development System (PDS) and the MathWorks
Matlab and Simulink. The real-time performances
are shown in the conclusions.
2 CONTROL SYSTEM DESIGN
AND RESEARCH
The control system design is shown in the Figure 3.
NONLINEAR FUZZY SELFTUNING PID CONTROL TECHNOLOGY AND ITS APPLICATIONS IN AUTOMATED
PROGRAMMING ROBOTICS
373
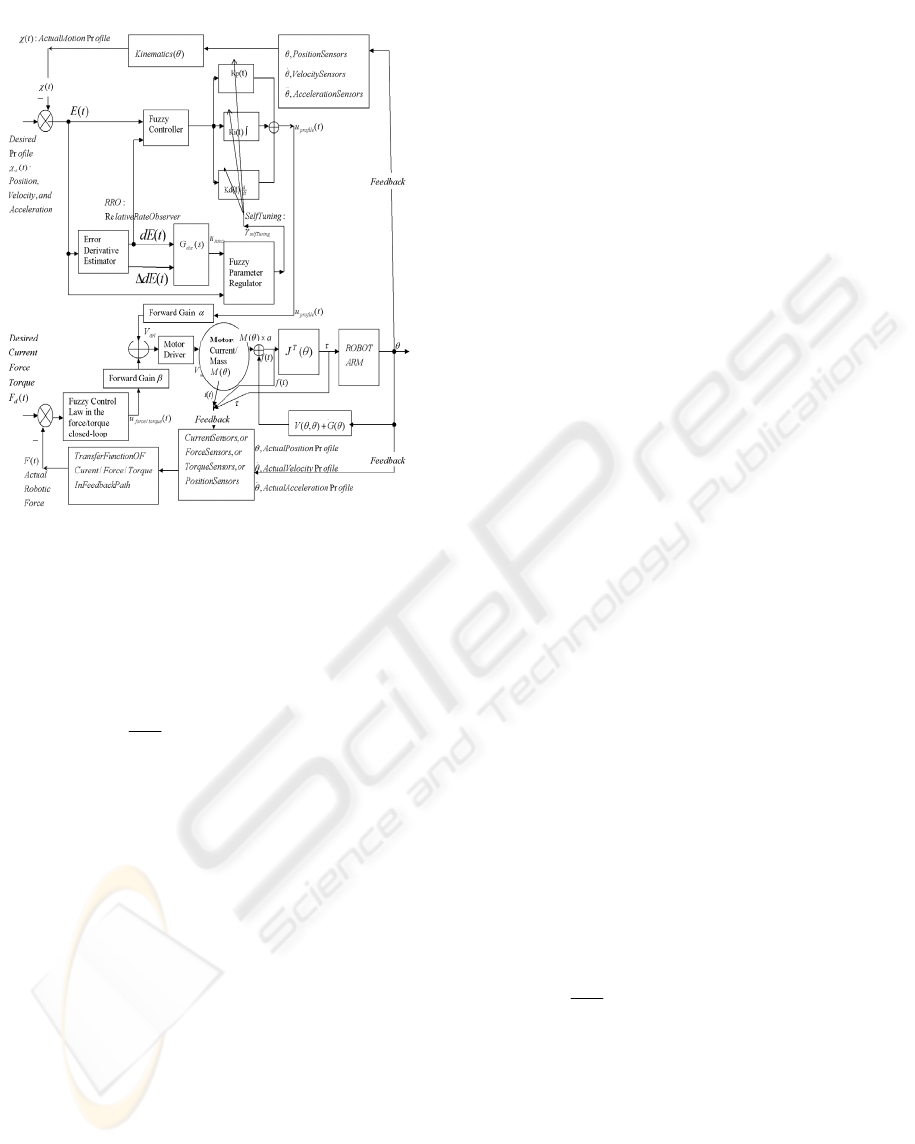
Figure 3: The control system design of nonlinear fuzzy
self-tuning PID robotic controller.
The robotic control object to obtain a steady
torque and high performance motion profiles, the
robotic control system transfer function
)(
θ
robot
G
is:
))(),(),(),(()(
)(
)(
ttttfsG
r
s
s
robot
τθθ
τ
Θ==
Θ
And
)(),())(()()(
..
θϑθθχθ
χχχ
GVtMtf ++=
Where
)(tf
is a fictitious force-moment acting on
the end-effectors of the robot arm,
)(
θ
χ
M
represents the mass matrix of the distributed robotic
joint in Cartesian space,
))(( t
θ
χ
is an appropriate
Cartesian vector representing position and
orientation of the end-effectors in Cartesian space.
),(
ϑθ
χ
V
is the Coriolis term of the robotic system
in Cartesian space,
)(
θ
χ
G
is the gravity term of the
robotic system in Cartesian space.
θ
is the angular
position of motor, the vector of joint angles of the
robotic arm.
ϑ
is the angular velocity of the motor,
θ
is the angular acceleration of the motor.
The advanced fuzzy self-tuning PID controller
provide a current/voltage control output variable
ctrl
ν
to a motor driver, the different motor drivers
have been designed in this control systems, for
instance, a switch-mode (chopper), constant-current
driver with multiple channels is designed in one
control unit; its current control inputs are low
current, high impedance inputs, which allows the use
of un-buffered DAC or external high resistive
resistor divider network. Each driver in the control
system contains a clock oscillator, which is common
for all the driver channels, a set of comparators and
flip-flops implementing the switching control, and
two output H-bridges for each motor, including
recirculation diodes. Maximum output current is
controlled at 750mA per channel. The DSP scales
and then generates PWM using the 68376’s TPU
from the control output
)(tV
ctrl
, The velocity control
is achieved through varying the voltage across the
terminals of a motor by the Pulse Width Modulation
that is the continuous fast switching of motor
voltage. By varying the duty cycle from 0% to
100%, the effective voltage across a motor can be
established from a set input of PMW duty cycle
(
motor
V
). The PWM duty cycle
motor
ν
is fed into the
motor drive to drive the DC servo motors; the
motors output the force
)(tf
, which support and
control the robotic operations in robotic Cartesian
based control space including robotic displacements
and robotic rotations.
The robotic torqueses come from the input
force
)(tf
. In Cartesian robotic task space, it can be
represented as
)()( tfJ
T
×=
θτ
Here
)(
θ
J
are Jacobians, a time-varying linear
transformations,
)(
θ
T
J
is the transpose Jacobian
transformation; only once in the case of a strictly
Cartesian robot arm, we can simplify the
)(
θ
T
J
to
the Jacobian’s inverse transformation
)(
1
θ
−
J
.
The voltage output
)(t
υ
of the motor driver and
motor current
)(ti
supplied by motor driver, input to
the robotic motors, the transfer function from the
driver input to the robotic force is
))(( sG
i
τ
.
))(),(()(
)(
)(
ttfsG
i
s
sf
i
υτ
υ
==
The desired control voltage
ctrl
V
, supplied by the
advanced Fuzzy self-tuning PID robotic controller,
consists of two components: robotic motion profile
voltage control component
)(tu
profile
and the robotic
force/torques/current voltage Fuzzy control
component
)(
/
tu
torqueforce
; i.e. the combined control
input is:
)(tV
ctrl
= (
α
)(tu
profile
+
β
)(
/
tu
torqueforce
)
Where
α
and
β
are forward control gains
coefficients. In the profile nonlinear fuzzy self-
tuning PID controller, the nonlinear fuzzy control
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
374

algorithm is implemented on the control DSP, based
on the Fuzzy control algorithm, the desired control
gains K
p(t), Ki(t), and Kd(t) for the motors are sel-
tuning on line in the control systems, and thus, the
equivalent control components of the fuzzy PID
controller are varied on line, it can be represented as
follows:
)(tu
profile
= Kp(t)
)(tUΔ
+ Ki(t)
dttU )(Δ∫
+
K
d(t)
dt
tUd
))(( Δ
Here:
Proportional gain control is Kp(t)
)(tUΔ
Integral gain control is Ki(t)
dttU )(Δ∫
Derivative gain control is Kd(t)
dt
tUd
))(( Δ
There is a RRO (relative rate observer) to estimate
the error derivative
)(tdE
, and construct
)(tdE
Δ
,
the derivative of
)(tdE
.
Here the motion profile control error is:
)()()()( tttEtE
dp
χ
χ
−==
And the RRO outputs the control variable
)(tu
RRO
to the PID parameter regulators; such that
regulator produce the regulation control output
)(t
selfTuning
γ
, which make the PID have a best-
performance control gains for the robotic systems.
3 NONLINEAR FUZZY
CONTROLLER
As shown in Figure 3, the error input for the motion
profile is
)()()( tttE
dp
χ
χ
−=
The error input for the force profile is:
)()()( tFtFtE
dF
−=
The desired voltage control of the nonlinear Fuzzy
PID is:
)(tV
ctrl
= (
α
)(tu
profile
+
β
)(
/
tu
torqueforce
)
This control output variables from the advance
Fuzzy control PID control the robotic systems, it has
achieved a high-performance actual profile in
robotic Cartesian space. The fuzzy control is not
only responsible to regulate the PID control gains, it
also provide the control variables for the
current/force/torque control closed-loop. The Fuzzy
control principle is show in Figure 4.
Figure 4: Nonlinear Fuzzy Controller.
Where the time continuous variables
q
VΔ
and
i
V
Δ
are the whole set of the control errors in the
control systems; which are the error set of
{
)(tE
p
, )(tE
F
}.
Basically, the nonlinear fuzzy controller consists
of three parts: the fuzzy discretization by use of the
fuzzy membership functions, the fuzzy control based
on the fuzzy control rules, and fuzzy decision
through the weighting meaning calculation.
4 CONCLUSIONS
The real-time performance results demonstrates that
the maximum Euler distance error of the Fuzzy self-
tuning PID equals to 0.0005239 inches, the PID
control accuracy is 0.175565 inches. The control
accuracy using a Fuzzy self-tuning PID controller is
improved compared a traditional PID controller in
Cartesian space
)}(),(,,,,{
2121
θ
μ
θ
μ
axisZaxisZYaxisXaxis .
REFERENCES
Shin, K. G: “Trajectory Planning for Robot Control: A
Control System Perspective, Control and Dynamic
System Series, Advances in Robotics System, “
Academic Press Inc.1991, pp. 105–146.
Yasuhiko Dote, Servo motor and motion control using
signal processors, TJ216.D68, Prentice Hall,:
Englewood Cliffs, N.J. 1990.
Bill Drury, The control techniques drives and controls
handbook, TK4058.D78, Stevenage: Institue of
Electrical Engineers, 2001.
Sakae Yamamura, AC motors for high-performance
applications: analysis and control, TK2791.Y35, New
York: Dekker, 1986.
Ganwen Zeng and Ahmad Hemami, “An overview of
robot force control,” Robotica, 1997, pp. 473-482.
NONLINEAR FUZZY SELFTUNING PID CONTROL TECHNOLOGY AND ITS APPLICATIONS IN AUTOMATED
PROGRAMMING ROBOTICS
375
