
Towards a Generic Anticipatory Agent Architecture for
Mobile Robots
?
Noury Bouraqadi
1
and Serge Stinckwich
2
1
D
´
ept I.A. – Ecole des Mines de Douai – France
2
GREYC – CNRS / Universit
´
e de Caen – France
Abstract. An anticipatory agent [1] is a hybrid agent which is able to predict
changes of itself and its environment. Such agents prove interesting [2] [3] [4]
in embedded systems such mobile robots. Indeed, they combine a reactive fast
layer with a cognitive layer capable to perform corrective actions to avoid un-
desired situations before they occur actually. We present in this paper a generic
architecture, that we plan to use as a guideline for developing anticipatory agents
embedded into robots for search & rescue missions. Our approach relies on soft-
ware components in order to explicit the anticipatory mechanisms.
1 Davidsson Quasi-Anticipatory Agent Architecture
From the definition of Rosen [5], Davidsson defines a very simple class of anticipatory
agent system: it contains a causal system S and a model M of this system that provides
predictions of S. As the model M is not a perfect representation of the reactive system,
this is called a quasi-anticipatory system. This architecture is rather coarse-grain. It is
only composed of 5 parts:
– Sensors: provide information about the agent environment.
– Effectors: allow the agent to act upon its environment.
– Reactor: drives the effectors in reaction to latest information provided by sensors.
– World Model: is an abstract view of the agent’s environment based on data collected
using sensors.
– Anticipator: modifies the reactor to avoid undesirable predicted world state.
2 MALEVA: A Software Component Model Expliciting Data and
Control Flows
Software component [6] is a programming paradigm that aims at going beyond Object-
Oriented programming from the point of view of modularity, reuse and improvement of
?
This work is partially supported by the CPER TAC 2004-2006 of the region Nord-Pas de Calais
and the european fund FEDER.
Bouraqadi N. and Stinckwich S. (2007).
Towards a Generic Anticipatory Agent Architecture for Mobile Robots.
In Proceedings of the 3rd International Workshop on Multi-Agent Robotic Systems, pages 102-105
Copyright
c
SciTePress
software quality. Indeed, a software component is a software entity which explicits its
dependencies and interactions with other components and resources it relies on.
In this paper, we use the MALEVA hierarchical component model [7] in order to
define and implement our anticipatory hybrid agent architecture. Indeed, MALEVA
components are close to building blocks of the Brooks subsumption model in their
encapsulation and interaction through data exchange [8].
A MALEVA component is a run-time software entity providing encapsulation like
objects, while expliciting its interactions with other components. MALEVA compo-
nents interact only through their interfaces. Interfaces can be of two kinds: data inter-
faces or control interfaces. Data interfaces are dedicated to data exchange, while control
interfaces are dedicated to control flow.
A component can be either active or passive. A passive component is a component
that does perform some computation only after being triggered through one of its con-
trol input interfaces. Once the component computation is over, it stops until being again
triggered. Contrary to a passive one, an active component don’t need to be triggered to
act. It uses a thread in order to run autonomously.
3 Overview of our Generic Anticipatory Agent Architecture
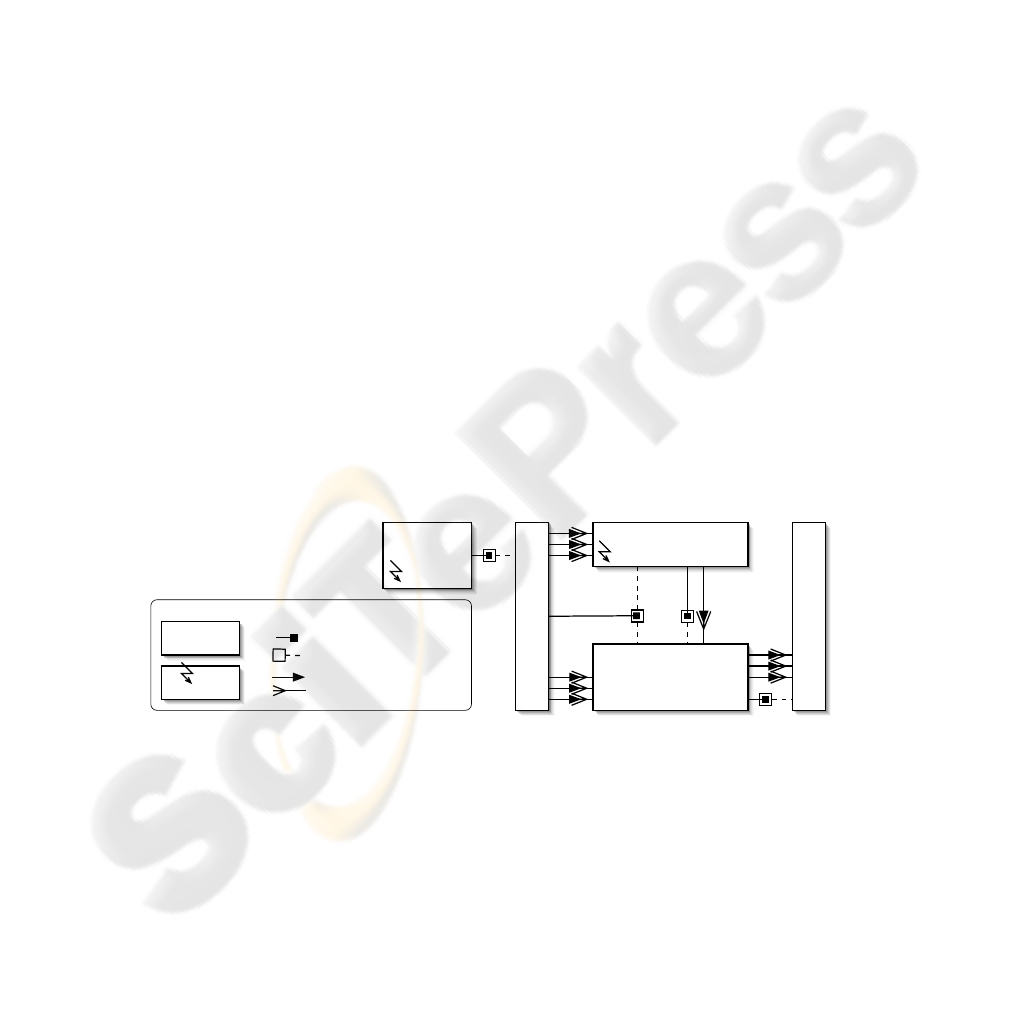
As shown on figure 1, our agent architecture is an assembly of five components: sensors,
effectors, reactor, reaction ticker and anticipator. The first three parts (namely: sensors,
effectors and the reactor) are application specific. However, the reactor is instrumented
in order to provide two generic interfaces for modifications input: one for modification
data flow and the second for modification control flow. The former allows the anticipator
to provide modifications to be performed on the reactor, while the latter allows the
anticipator to trigger the modifications. These two interfaces can be viewed as the so-
called “meta-interfaces” in the work on Open Implementation [9], since they allow a
disciplined modification of the reactor.
Sensors
Anticipator
Instrumented
Reactor
Effectors
reactor
modification
interfaces
Reaction
Ticker
Caption
Control flow output interface
Control flow input interface
Data flow output interface
Data flow input interface
Passive
Component
Active
Component
sensors ticks
interface
Fig. 1. Our Anticipatory Agent Architecture.
The “Reaction Ticker” is a generic active component that drives the agent’s reac-
tion. It defines the frequency at which the agent will sense its environment and react to
changes. Indeed, the “Reaction Ticker” triggers the Sensors component every m mil-
liseconds, where m is the duration between two ticks and depends on the application
context.
103
The Sensors component
3
collects data from the agent’s world and propagates it
through its data interfaces to both the reactor and the anticipator. Then, it triggers the ac-
tivity of both the anticipator and the reactor. When getting triggered, the reactor decides
the appropriate reaction to perform and translates this decision into data propagated to
the Effectors component
4
.
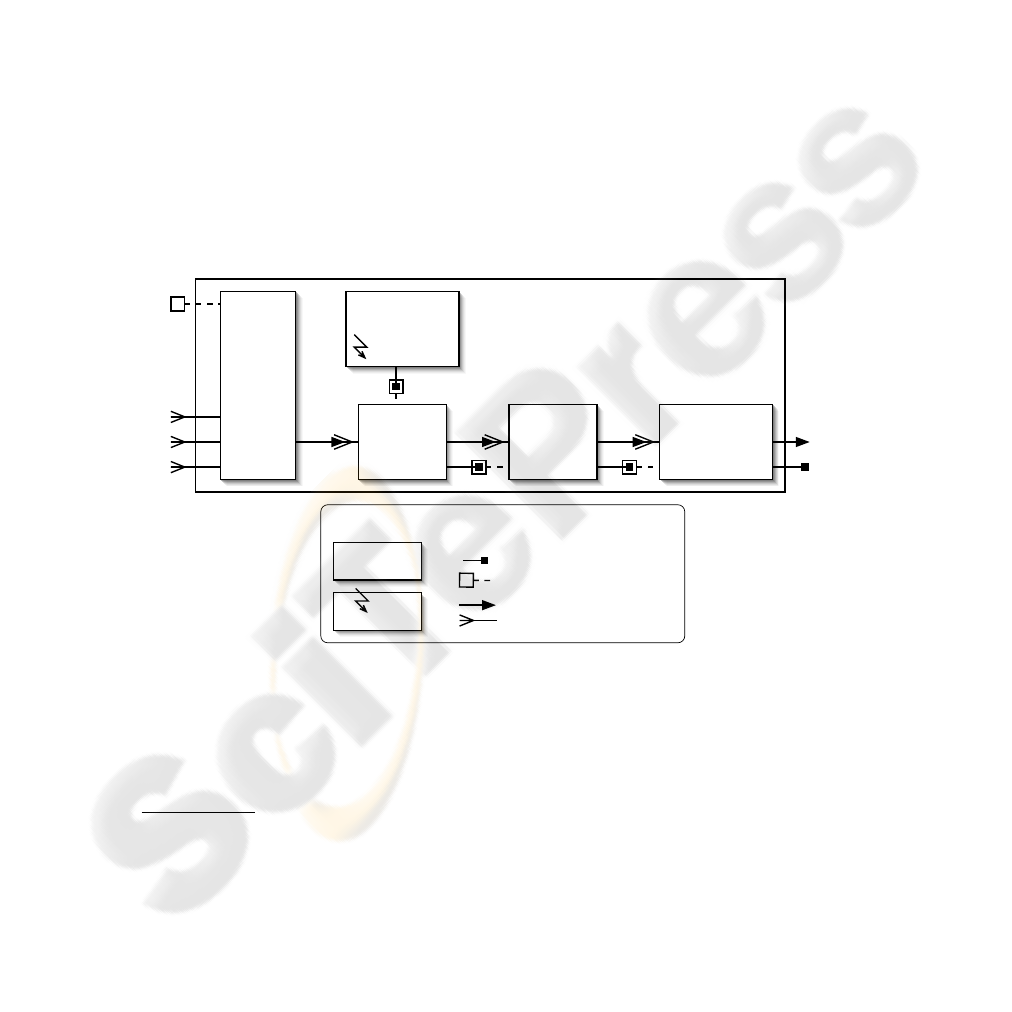
4 The Anticipator Component
The Anticipator component is an active composite component (see figure 2). It is active
since it includes its own ticker that allows it to run concurrently to the reactor. The
ticking frequency is higher than the “Reaction Ticker” one, since the anticipator has
to work faster than the reactor, in order to make useful predictions. By expliciting the
ticking control through the “Anticipation Ticker”, this frequency can be easily changed.
This feature is very important since it allows to tune the anticipator consumption of
resources (computing, energy, . . . ), particularly in case of embedded devices with low
capabilities. This frequency can even be changed dynamically, according to resource
evolutions, such as the battery level in a mobile robot.
Caption
Control flow output interface
Control flow input interface
Data flow output interface
Data flow input interface
Passive
Component
Active
Component
Anticipation
Ticker
World
State
Builder
Predictor Analyzer
Modification
Builder
Current
World
State
Predicted
World
State
Undesirable
State
Reactor
Modifications
Sensed Data
Reactor
ticks
Modifications
Trigger
Fig. 2. The Anticipator Architecture.
Each tick of the “Anticipation Ticker” makes the Predictor component predict the
next world state and the next reactor action. Then, the Analyzer component analyzes the
3
Actually, the Sensors component can be a composite with multiple subcomponents corre-
sponding to different sensors.
4
Actually, the Effectors component can also be a composite with multiple subcomponents cor-
responding to different effectors.
104

predicted world state and identifies undesired situations. In case of undesired states, the
“Modification Builder” component plans the appropriate modifications and transmits
them to the reactor.
It worth noting that, except the data input interfaces connecting the “World State
Builder” to sensors, all other interfaces are generic. Therefore this architecture can be
reused in multiple contexts.
5 Conclusion and Ongoing Work
In this paper, we draw the foundations for a generic agent architecture based on the
Davidsson anticipatory model. This architecture can be reused in multiple contexts and
may also serve at the basis for a methodology to design an anticipatory agent
Implementing the examples (”bot in a maze”) described in the Davidsson paper,
enabled us to prove that it is possible to propose a sufficiently generic architecture
for an anticipatory agent regarding the application domain. A more complete validation
will be soon carried out with experiments under development of a vacuum cleaner robot
simulation. We also plan to experiment our architecture on mobile robots in a search &
rescue project.
Another question we would like to explore is how to instrument the reactor com-
ponent and how to automate the transformation in order to introduce a modification
interface. This point is rather complex and varies according to the reactor architecture
and its properties. For example, in the case of the subsumption model [8], we need to
establish the interaction between the modification interface and the reactor layer.
References
1. Davidsson, P.: A linearly quasi-anticipatory autonomous agent architecture : Some prelimi-
nary experiments. In: Distributed Artificial Intelligence Architecture and Modelling. Number
1087 in Lecture Notes in Artificial Intelligence, Springer Verlag (1996) 189–203
2. Stolzmann, W.: Anticipatory classifier systems. In Koza, J.R ., Banzhaf, W., Chellapilla, K.,
Kalyanmoym, D., Dorigo, M., Fogel, D.B., Garzon, M.H., Goldberg, D.E., Iba, H., Riolo,
R., eds.: Genetic Programming 3: Proceedings of the Third Annual Conference, University of
Wisconsin, Madison, Morgan Kaufmann (1998) 658–664
3. Einarson, D.: Hierarchical models of anticipation. In: CASYS’2001. (2001)
4. Shang, F., Cheng, J.: Implementation issues of anticipatory reasoning-reacting systems. In:
International Workshop on Research Directions and Challenge Problems in Advanced Infor-
mation Systems Engineering. (2003)
5. Rosen, R.: Anticipatory Systems - Philosophical, Mathematical and Methodological Founda-
tions. Pergamon Press (1985)
6. Szyperski, C.: Component Software - Beyond Object-Oriented Programming. 2nd edition.
Addison-Wesley (2002)
7. Briot, J.P., Meurisse, T., Peschanski, F.: Une exp
´
erience de conception et de composition de
comportements d’agents
`
a l’aide de composants. L’Objet 11 (2006) 1–30
8. Brooks, R.A.: A robust layered control system for a mobile robot. IEEE Journal of Robotics
and Automation 2 (1986) 14–23
9. Kiczales, G.: Beyond the black box: Open implementation. IEEE Software (1996)
105
