
INTEGRATED DESIGN OF A MECHATRONIC SYSTEM
The Pressure Control in Common Rails
Paolo Lino and Bruno Maione
Dipartimento di Elettrotecnica ed Elettronica, Politecnico di Bari, via Re David 200, 70125, Bari, Italy
Keywords:
Mechatronic systems, Virtual prototyping, AMESim
r
, Modelling, Automotive control.
Abstract:
This paper describes the integrated design of the pressure control in a common-rail injection system. Mechan-
ical elements and the embedded controller are considered as a whole, using a multi-disciplinary approach to
modelling and simulation. The virtual prototype, which provides the detailed geometrical/physical model of
the mechanical parts, plays the role of a surrogate of a reference hardware prototype in reduced-order mod-
elling, validation, and/or in tuning the control parameters. The results obtained by the proposed approach are
compared and validated by experiments.
1 INTRODUCTION
The innovative characters of mechatronic systems
lie with a special design process thinking about the
mechanical parts and the embedded controllers as a
whole. On the contrary, the traditional design of de-
vices combining mechanical and electronic elements
considers components belonging to different physi-
cal domain separately. Moreover controllers are con-
ceived for already existing plants. Hence the physi-
cal properties and the dynamical behaviour of parts,
in which energy conversion plays a central role, are
not determined by the choices of the control engi-
neers and therefore are of little concern to them. Their
primary interests, indeed, are signal processing and
information management, computer power require-
ments, choice of sensors and sensor locations, and so
on. So it can happen that poorly designed mechan-
ical parts do never lead to good performance, even
in presence of advanced controllers. On the other
hand, a poor knowledge of how controllers can di-
rectly influence and balance for defects or weaknesses
in mechanical components does not help in achieving
quality and good performance of the whole process.
Aiming at an integrated design, in mechatronic sys-
tems the interactions among mechanical, electronic
and information processing elements are considered
in all the design steps, beginning with the early stages
(Stobart et al., 1999),(van Amerongen and Breedveld,
2003).
If the design choices must be made before assem-
bling interacting parts of a physical prototype and if
these parts belong to different physical domains (such
as mechanics, electronics, hydraulics and control) the
virtual prototyping approaches, which are surrogates
for preliminary physical realizations, face many diffi-
culties. The first one is due to the fact that each phys-
ical domain has specific modelling and simulation
tools. Unfortunately, indeed, there is a gap between
tools for evaluating the designed components in dif-
ferent domains. For example, mechanical engineers
usually refer to finite element approaches/packages as
an important tool for dimensioning mechanical parts
and for evaluating their dynamical properties. Only
after a complex order-reduction process (modal anal-
ysis) the so obtained models are reduced in a form
suitable for the control analysis and design. On the
other hand, control modelling tools are based on oper-
ators (transfer functions, frequency response) and/or
on state equations descriptions, which, in many cases,
do not have a straightforward connection with the crit-
ical parameters of physical design. However, it is
clear that an appropriate modelling and simulation ap-
proach can not be fitted into the limitations of one for-
malism at time, particularly in the early stages of the
design process. Hence, it is necessary a combination
11
Lino P. and Maione B. (2007).
INTEGRATED DESIGN OF A MECHATRONIC SYSTEM - The Pressure Control in Common Rails.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 11-18
DOI: 10.5220/0001632800110018
Copyright
c
SciTePress

of different methodologies in a multi-formalism ap-
proach to modelling supported by an appropriate sim-
ulation environment.
In mechatronic applications, the Bond Graphs in-
troduced by (Paynter, 1960) provide a continuous sys-
tem modelling approach, oriented to a class of inter-
connected and completely different systems and tar-
geted to many user groups. Bond Graphs are very use-
ful in analysing and designing components built from
different energetic media and can represent dynamical
systems at higher level of abstraction than differen-
tial equations (van Amerongen and Breedveld, 2003),
(Ferretti et al., 2004).
In this paper, we referred to AMESim
r
(Ad-
vanced Modelling Environment for performing Sim-
ulations of engineering systems) (IMAGINE S.A.,
2004) a Bond Graph-based, multi-domain mod-
elling/optimization tool for the virtual prototyping
of the physical/geometrical characteristics of a Com-
pressed Natural Gas (CNG) injection system. In a first
step, we used this tool to obtain a virtual prototype, as
similar as possible to the actual final hardware. Then,
with reference to this prototype, we also determined
a reduced order model in form of transfer function
and/or state space model, more suitable for analytical
(or empirical) tuning of the pressure controller of the
CNG injection systems. Using the virtual prototype
in these early design stages enabled the evaluation of
the influence of the geometrical/physical alternatives
on the reduced model used for the controller tuning.
Then, based on this reduced model, the controller set-
tings were designed and adjusted in accordance with
the early stages of the mechanical design process. Fi-
nally, the detailed physical/geometric model of the
mechanical parts, created by the AMESim package,
was exported ad used as a module in a simulation
program, which enabled the evaluation of the con-
troller performance in the closed-loop system. In
other words, the detailed simulation model surrogated
for a real hardware.
2 THE INTEGRATED DESIGN
APPROACH
In this paper, we consider the opportunity of integrat-
ing different models, at different level of details, and
different design tools, to optimize the design of the
mechanical and control systems as a whole. To sum
up, the integrated design can take advantage of pecu-
liarities of different specific software packages. The
effectiveness of the approach is illustrated by means
of a case study, the pressure control of a CNG injec-
tion system for internal combustion engines, which
represents a benchmark for the evaluation of perfor-
mances of the approach. Experimental results give a
feedback of benefits of the integration of the mechan-
ical and control subsystems design.
The integrated design involves the development
of a virtual prototype of the considered system using
an advanced modelling tool (AMESim in this paper),
which is employed for the analysis of the system per-
formances during the different developing steps. Ac-
tually, the virtual prototype could be assumed as a re-
liable model of the real system. Further, a low order
analytical model of the real system can be developed
to simplify the controller design. Since AMESim can
represent physical phenomena at different level of de-
tails, it is exploited to verify assumptions in build-
ing the analytical model. Then, the control system
is designed using a specific software package, i.e.
MATLAB/Simulink
r
, and tested on the virtual pro-
totype. The virtual prototype allows to perform safer,
less expensive, and more reliable tests than using the
real system.
3 APPLICATION EXAMPLE
We consider a system composed of the following el-
ements (Fig. 1): a fuel tank, storing high pressure
gas, a mechanical pressure reducer, a solenoid valve
and the fuel metering system, consisting of a com-
mon rail and four electro-injectors. Two different con-
figurations were compared for implementation, with
different arrangements of the solenoid valve affecting
system performances (i.e. cascade connection, figure
1(a), and parallel connection, Fig.1(b), respectively).
Detailed AMESim models were developed for each
of them, providing critical information for the final
choice. Few details illustrate the injection operation
for both layouts.
With reference to Fig. 1(a), the pressure reducer
receives fuel from the tank at a pressure in the range
between 200 and 20 bars and reduces it to a value of
about 10 bar. Then the solenoid valve suitably reg-
ulates the gas flow towards the common rail to con-
trol pressure level and to damp oscillations due to in-
jections. Finally, the electronically controlled injec-
tors send the gas to the intake manifold for obtain-
ing the proper fuel air mixture. The injection flow
only depends on rail pressure and injection timings,
which are precisely driven by the Electronic Control
Unit (ECU). The variable inflow section of the pres-
sure reducer is varied by the axial displacement of a
spherical shutter coupled with a moving piston. Pis-
ton and shutter dynamics are affected by the applied
forces: gas pressure in a main chamber acts on the
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
12
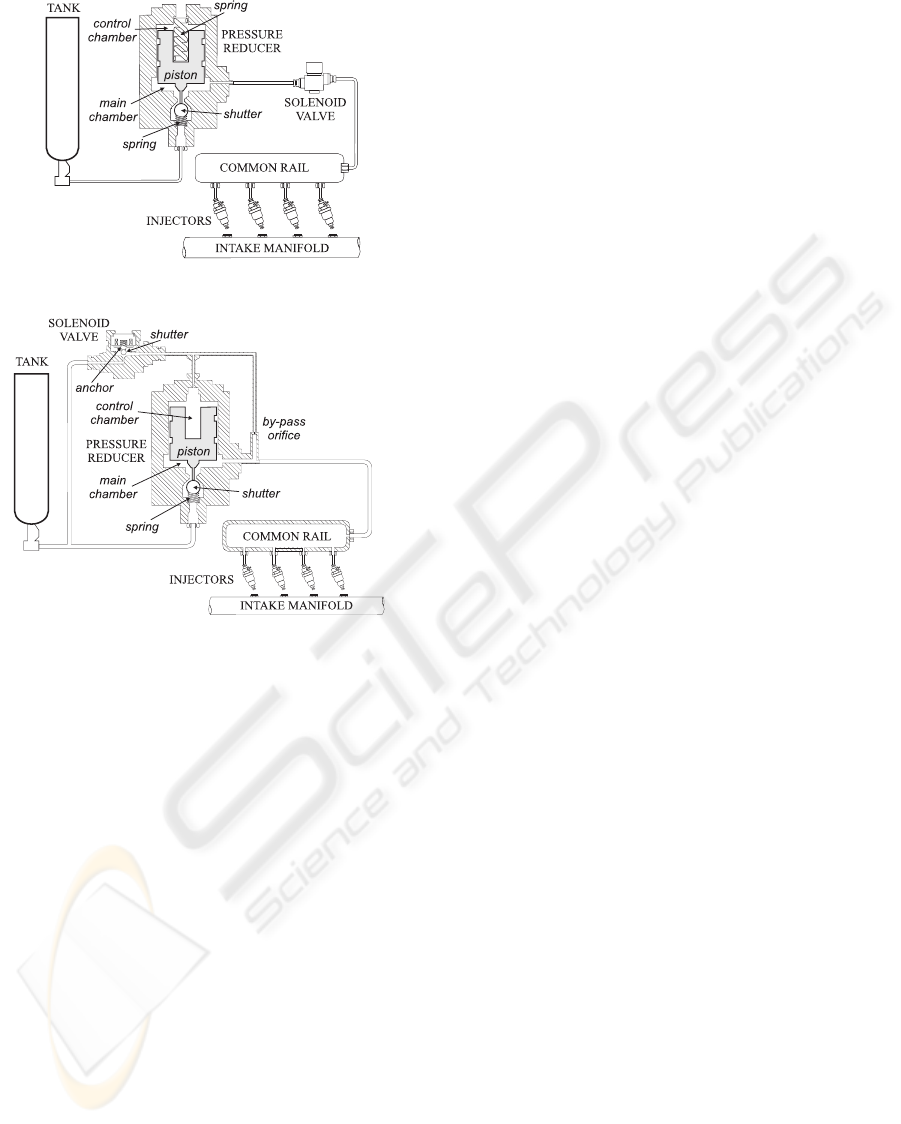
(a)
(b)
Figure 1: Block schemes of the common rail CNG injec-
tion systems; (a) cascade connection of solenoid valve; (b)
parallel connection of solenoid valve.
piston lower surface pushing it at the top, and elastic
force of a preloaded spring holden in a control cham-
ber pushes it down and causes the shutter to open. The
spring preload value sets the desired equilibrium re-
ducer pressure: if the pressure exceeds the reference
value the shutter closes and the gas inflow reduces,
preventing a further pressure rise; on the contrary, if
the pressure decreases, the piston moves down and
the shutter opens, letting more fuel to enter and caus-
ing the pressure to go up in the reducer chamber (see
(Maione et al., 2004) for details).
As for the second configuration (Fig. 1(b)), the
fuel from the pressure reducer directly flows towards
the rail, and the solenoid valve regulates the in-
take flow in a secondary circuit including the con-
trol chamber. The role of the force applied by the
preloaded spring of control chamber is now played by
the pressure force in the secondary circuit, which can
be controlled by suitably driving the solenoid valve.
When the solenoid valve is energized, the fuel en-
ters the control chamber, causing the pressure on the
upper surface of the piston to build up. As a con-
sequence, the piston is pushed down with the shut-
ter, letting more fuel to enter in the main chamber,
where the pressure increases. On the contrary, when
the solenoid valve is non-energized, the pressure on
the upper side of the piston decreases, making the pis-
ton to raise and the main chamber shutter to close un-
der the action of a preloaded spring (see (Lino et al.,
2006) for details).
On the basis of a deep analysis performed on
AMESim virtual prototypes the second configuration
was chosen as a final solution, because it has advan-
tages in terms of performances and efficiency. To
sum up, it guarantees faster transients as the fuel can
reach the common rail at a higher pressure. Moreover,
leakages involving the pressure reducer due to the al-
lowance between cylinder and piston are reduced by
the lesser pressure gradient between the lower and up-
per piston surfaces. Finally, allowing intermediate po-
sitions of the shutter in the pressure reducer permits
a more accurate control of the intake flow from the
tank and a remarkable reduction of the pressure oscil-
lations due to control operations. A detailed descrip-
tion of the AMESim model of the system according
the final layout is presented in section 4 (Fig. 2).
4 AMESIM MODEL OF THE CNG
INJECTION SYSTEM
AMESim is a virtual prototyping software produced
by IMAGINE S.A., which is oriented to lumped pa-
rameter modelling of physical elements, intercon-
nected by ports enlightening the energy exchanges be-
tween pairs of elements and between an element and
its environment. AMESim enables the modelling of
components from different physical domains and the
integration of these different elements in an overall
system framework. It also guarantees a flexible archi-
tecture, capable of including new components defined
by the users.
By assumption, the pressures distribution within
the control chamber, the common rail and the injec-
tors is uniform, and the elastic deformations of solid
parts due to pressure changes are negligible. The
pipes are considered as incompressible ducts with
friction and a non uniform pressure distribution. Tem-
perature variations are taken into account, affecting
the pressure dynamics in each subcomponent. Be-
sides, only heat exchanges through pipes are con-
sidered, by properly computing a thermal exchange
coefficient. The tank pressure plays the role of a
maintenance input, and it is modelled by a constant
INTEGRATED DESIGN OF A MECHATRONIC SYSTEM - The Pressure Control in Common Rails
13
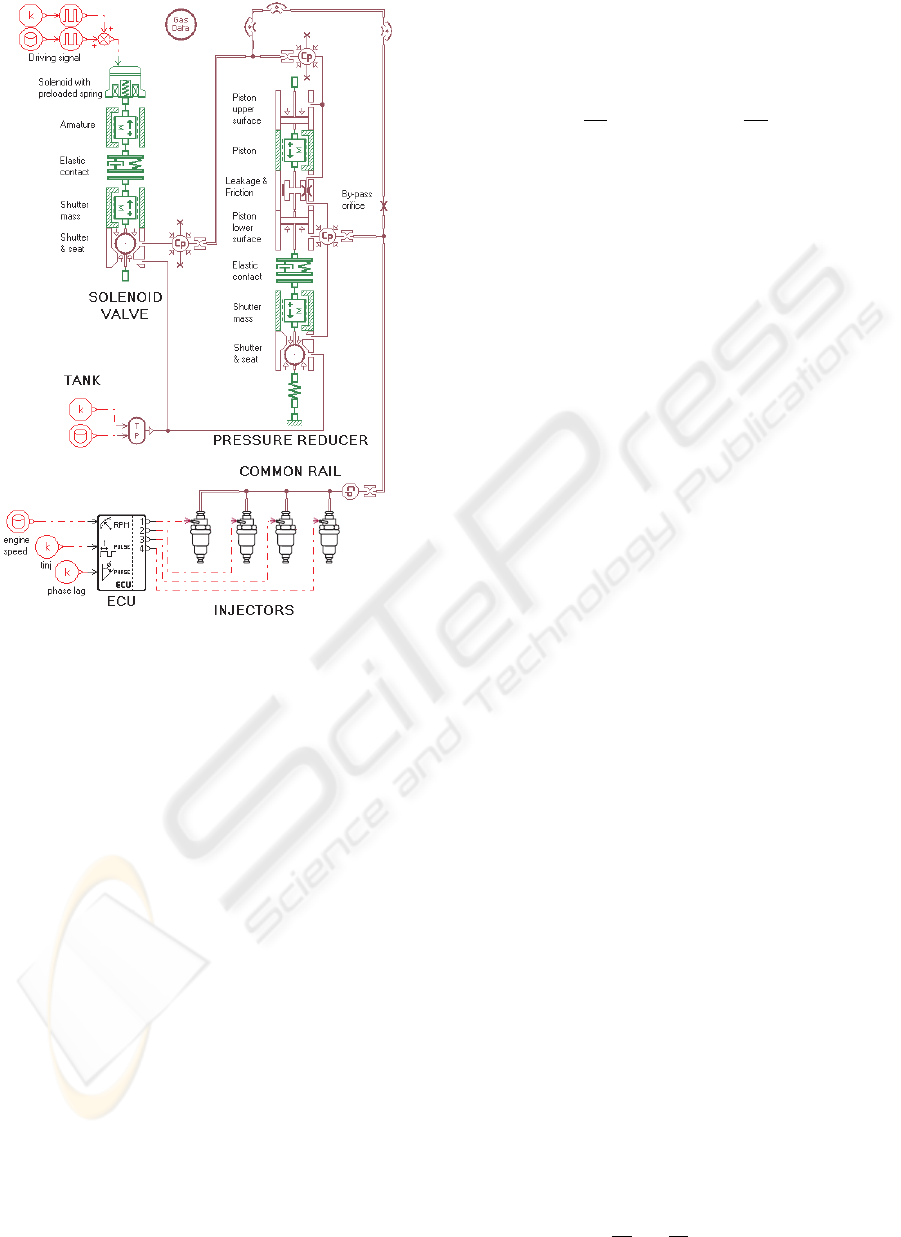
Figure 2: AMESim model of the CNG injection system.
pneumatic pressure source. To simplify the AMESim
model construction some supercomponents have been
suitably created, collecting elements within a single
one.
4.1 Pressure Reducer and Common
Rail
The main components for modelling the pressure re-
ducer are the Mass block with stiction and coulomb
friction and end stops, which computes the piston
and the shutter dynamics through the Newton’s sec-
ond law of motion, a Pneumatic ball poppet with con-
ical seat, two Pneumatic piston, and an Elastic con-
tact modelling the contact between the piston and the
shutter. The Pneumatic piston components compute
the pressure forces acting upon the upper and lower
piston surfaces. The viscous friction and leakage due
to contact between piston and cylinder are taken into
account through the Pneumatic leakage and viscous
friction component, by specifying the length of con-
tact, the piston diameter and the clearance. Finally, a
Variable volume with pneumatic chamber is used to
compute the pressure dynamics as a function of tem-
perature T and intake and outtake flows ˙m
in
, ˙m
out
, as
well as of volume changes due to mechanical part mo-
tions, according to the following equation:
˙p =
RT
V
˙m
in
− ˙m
out
+ ρ
dV
dt
, (1)
where p is the fuel pressure, ρ the fuel density and
V the taken up volume. The same component is used
to model the common rail by neglecting the volume
changes.
Both pressure and viscous stresses contribute to
drag forces acting on a body immersed in a moving
fluid. In particular, the total drag acting on a body
is the sum of two components: the pressure or form
drag, due to pressure gradient, and the skin friction
or viscous drag, i.e. Drag force = Form drag + Skin
friction drag. By introducing a drag coefficient C
D
depending on Reynolds number, the drag can be ex-
pressed in terms of the relative speed v (Streeter et al.,
1998):
Drag = C
D
ρAv
2
/2. (2)
Moving shutters connecting two different control vol-
umes are subject to both form drag and skin fric-
tion drag. The former one is properly computed by
AMESim algorithms for a variety of shutters, con-
sidering different poppet and seat shapes. As for the
latter, it is computed as a linear function of the fluid
speed by the factor of proportionality. It can be ob-
tained by noting that for a spherical body it holds
Form Drag = 2πDµv (Streeter et al., 1998), being µ
the absolute viscosity and D the shutter diameter. The
moving anchor in the solenoid valve experiences a
viscous drag depending on the body shape. In par-
ticular, the drag coefficient of a disk is C
D
= 1.2, and
the skin friction drag can be computed using eq. 2.
Since, by hypothesis, the anchor moves within a fluid
with uniform pressure distribution, the form drag is
neglected.
4.2 Pipes
The continuity and momentum equations are used to
compute pressures and flows through pipes so as to
take into account wave propagation effects. In case
of long pipes with friction, a system of nonlinear par-
tial differential equations is obtained, which is imple-
mented in the Distributive wave equation submodel
of pneumatic pipe component from the pneumatic li-
brary. This is the case of pipes connecting pressure re-
ducer and common rail. The continuity and momen-
tum equations can be expressed as follows (Streeter
et al., 1998):
∂ρ
∂t
+ ρ
∂v
∂x
= 0, (3)
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
14

∂u
∂t
+
α
2
ρ
ρ
x
+
f
2d
u|u| = 0, (4)
where α is the sound speed in the gas, d is the pipe
diameter, f is the D’Arcy friction coefficient depend-
ing on the Reynolds number. AMESim numerically
solves the above equations by discretization.
For short pipes, the Compressibility + friction
submodel of pneumatic pipe from is used, allowing to
compute the flow according the following equation:
q =
s
2D∆p
Lρf
, (5)
where ∆p is the pressure drop along the pipe of length
L. The pipes connecting common rail and injectors
are modelled in such a way.
Heat transfer exchanges are accounted for by the
above mentioned AMESim components, provided
that a heat transfer coefficient is properly specified.
For a cylindrical pipe of length L consisting of a ho-
mogeneous material with constant thermal conductiv-
ity k and having an inner and outer convective fluid
flow, the thermal flow Q is given by (Zucrow and
Hoffman, 1976):
Q =
2πkL∆T
ln
r
o
r
i
, (6)
where ∆T is the temperature gradient between the in-
ternal and external surfaces, and r
o
and r
i
are the ex-
ternal and internal radiuses, respectively. With ref-
erence to the outside surface of the pipe, the heat-
transfer coefficient U is:
U
o
=
k
r
o
ln
r
o
r
i
. (7)
4.3 Solenoid Valve and Magnetic
Circuits
The AMESim model for the solenoid valve is com-
posed of the following elements: a solenoid with
preloaded spring, two moving masses with end stops
subject to viscous friction and representing the mag-
net anchor and the shutter respectively, and a compo-
nent representing the elastic contact between the an-
chor and the shutter. The intake section depends on
the axial displacement of the shutter over the conical
seat and is computed within the Pneumatic ball pop-
pet with conical seat component, which also evaluates
the drags acting on the shutter. The solenoid valve
is driven by a peak-hold modulated voltage. The re-
sulting current consists of a peak phase followed by
a variable duration hold phase. The valve opening
time is regulated by varying the ratio between the hold
phase duration and signal period, namely the control
signal duty cycle. This signal is reconstructed by us-
ing a Data from ASCII file signal source that drives a
Pulse Width Modulation component.
To compute the magnetic force applied to the
anchor, a supercomponent (Solenoid with preloaded
spring in Fig. 2) modelling the magnetic circuit has
been suitably built, as described in the following. The
magnetic flux within the whole magnetic circuit is
given by the Faraday law:
˙
ϕ = (e
ev
− R
ev
i
ev
)/n, (8)
where ϕ is the magnetic flux, R the n turns winding
resistance, e
ev
the applied voltage and i
ev
the circuit
current. Flux leakage and eddy-currents have been
neglected. The magnetomotive-force MMF able to
produce the magnetic flux has to compensate the mag-
netic tension drop along the magnetic and the air gap
paths. Even though most of the circuit reluctance is
applied to the air gap, nonlinear properties of the mag-
net, due to saturation and hysteresis, sensibly affect
the system behaviour. The following equation holds:
MMF = MMF
s
+ MMF
a
= H
s
l
s
+ H
a
l
a
, (9)
where H is the magnetic field strength and l is the
magnetic path length, within the magnet and the gap
respectively. The air gap length depends on the actual
position of the anchor. The magnetic induction within
the magnet is a nonlinear function of H. It is assumed
that the magnetic flux cross section is constant along
the circuit, yielding:
B = ϕ/A
m
= f (H
s
) = µ
0
H
a
, (10)
where A
m
is the air gap cross section and µ
0
is the
magnetic permeability of air. The B− H curve is the
hysteresis curve of the magnetic material. Arranging
the previous equations yields to ϕ, B and H. The re-
sulting magnetic force and circuit current are:
F
ev
= A
m
B
2
/µ
0
, (11)
i
ev
= MMF/n. (12)
The force computed by the previous equation is ap-
plied to the mass component representing the anchor,
so that the force balance can be properly handled by
AMESim.
4.4 Injectors
The injectors are solenoid valves driven by the ECU
in dependence of engine speed and load. The whole
injection cycle takes place in a 720
o
interval with a
delay between each injection of 180
o
. A supercompo-
nent including the same elements as for the solenoid
valve has been built to model the electro-injectors.
The command signal generation is demanded to the
ECU component, which provides a square signal driv-
ing each injector and depending on the current engine
speed, injector timings and pulse phase angle.
INTEGRATED DESIGN OF A MECHATRONIC SYSTEM - The Pressure Control in Common Rails
15

5 CONTROLLER DESIGN
In designing an effective control strategy for the in-
jection pressure it is necessary to satisfy physical
and technical constraints. In this framework, model
predictive control (MPC) techniques are a valuable
choice, as they have shown good robustness in pres-
ence of large parametric variations and model uncer-
tainties in industrial processes applications. They pre-
dict the output from a process model and then impress
a control action able to drive the system to a reference
trajectory (Rossiter, 2003). A 2
nd
order state space
analytical model of the plant (Lino et al., 2006) is
used to derive a predictive control law for the injection
pressure regulation. The model trades off between ac-
curacy in representing the dynamical behaviour of the
most significant variables and the need of reducing
the computational effort and complexity of controller
structure and development. The design steps are sum-
marized in the following. Firstly, the model is lin-
earized at different equilibrium points, in dependence
of the working conditions set by the driver power re-
quest, speed and load. From the linearized models it
is possible to derive a discrete transfer function repre-
sentation by using a backward difference method. Fi-
nally, a discrete Generalised Predictive Contrl (GPC)
law suitable for the implementation in the ECU is de-
rived from the discrete linear models equations.
By considering the duty cycle of the signal driving
the solenoid valve and the rail pressure as the input
u and output y respectively, a family of ARX mod-
els can be obtained, according the above mentioned
design steps (Lino et al., 2006):
1− a
1
q
−1
y(t) =
b
0
q
−1
− b
1
q
−2
u(t), (13)
where q
−1
is the shift operator and a
1
, b
0
, b
1
are con-
stant parameters. The j-step optimal predictor of a
system described by eq. 13 is (Rossiter, 2003):
ˆy(t + j|t) = G
j
∆u(t + j− 1) +F
j
y(t), (14)
where G
j
and F
j
are polynomials in q
−1
, and ∆ is
the discrete derivative operator. Let r be the vec-
tor of elements y(t + j), j = 1,... ,N, depending on
known values at time t. Then eq. (14) can be ex-
pressed in the matrix form
ˆ
y = G
˜
u + r, being
˜
u =
[∆u(t), .. .,∆u(t + N − 1)]
T
, and G a lower triangular
N × N matrix (Rossiter, 2003).
If the vector w is the sequence of future reference-
values, a cost function taking into account the future
errors can be introduced:
J = E
n
(G
˜
u+ r− w)
T
(G
˜
u+ r− w) + λ
˜
u
T
˜
u
o
,
(15)
where λ is a sequence of weights on future control
actions. The minimization of J with respect of
˜
u gives
the optimal control law for the prediction horizon N:
˜
u =
G
T
G+ λI
−1
G
T
(w− r). (16)
At each step, the first computed control action is ap-
plied and then the optimization process is repeated af-
ter updating all vectors. It can be shown (Lino et al.,
2006) that the resulting control law for the case study
becomes:
∆u(t) = k
1
w(t) +
k
2
+ k
3
q
−1
y(t) + k
4
∆u(t − 1),
(17)
where [k
1
,k
2
,k
3
,k
4
] depends on N.
6 SIMULATION AND
EXPERIMENTAL RESULTS
To assess the effectiveness of the AMESim model in
predicting the system behaviour, a comparison of sim-
ulation and experimental results has been performed.
Since, for safety reasons, air is used as test fluid, the
experimental setup includes a compressor, providing
air at a constant input pressure and substituting the
fuel tank. The injection system is equipped with four
injectors sending the air to a discharging manifold.
Moreover, a PC system with a National Instrument
acquisition board is used to generate the engine speed
and load signals, and a programmable MF3 develop-
ment master box takes the role of ECU driving the
injectors and the control valve.
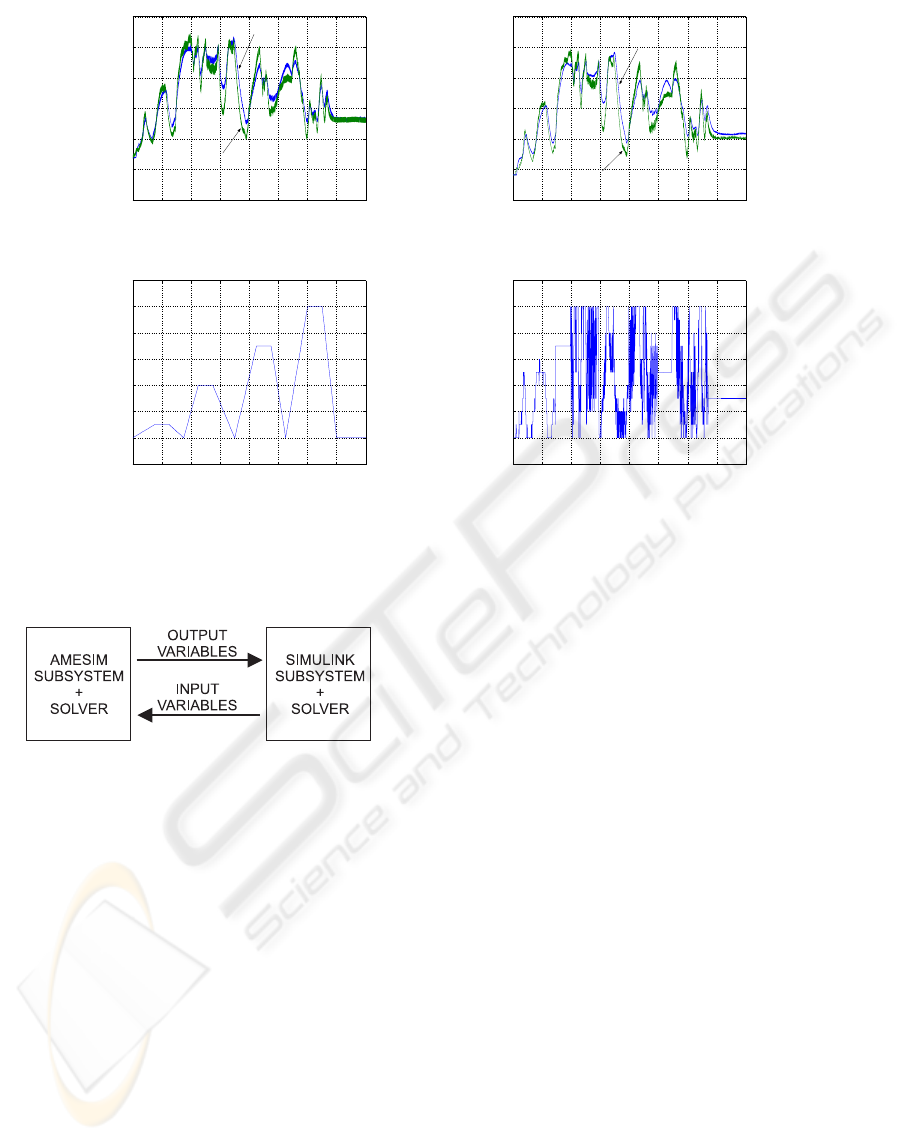
Figure 3 refers to a typical transient operating con-
dition, and compares experimental and simulation re-
sults. With a constant 40 bar input pressure, the sys-
tem behaviour for a constant t
j
= 3ms injectors open-
ing time interval, while varying engine speed and
solenoid valve driving signal has been evaluated. The
engine speed is composed of ramp profiles (Fig. 3(c)),
while the duty cycle changes abruptly within the inter-
val [2%,12%] (Fig. 3(d)). Figures 3(a) and 3(b) show
that the resulting dynamics is in accordance with the
expected behaviour. A maximum error of 10% con-
firms the model validity.
After the validation process, the AMESim vir-
tual prototype was used to evaluate the GPC con-
troller performances in simulation by employing the
AMESim-Simulink interface, which enabled us to ex-
port AMESim models within the Simulink environ-
ment. The interaction between the two environments
operates in a Normal mode or a Co-simulation mode.
As for the former, a compiled S-function containing
the AMESim model is generated and included in the
Simulink block scheme, and then integrated by the
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
16
0 20 40 60 80 100 120 140 160
2
4
6
8
10
12
Time [s]
Control Chamber Pressure [bar]
experimental pressure
simulated pressure
(a)
0 20 40 60 80 100 120 140 160
2
4
6
8
10
12
Time [s]
Rail Pressure [bar]
experimental pressure
simulated pressure
(b)
0 20 40 60 80 100 120 140 160
0
1
2
3
4
5
6
7
Time [s]
Engine Speed [rpm x 1000]
(c)
0 20 40 60 80 100 120 140 160
0
2
4
6
8
10
12
14
Time [s]
duty cycle [%]
(d)
Figure 3: AMESim simulation and experimental results when varying duty cycle. and engine speed, with a constant t
j
= 3ms;
(a) control chamber pressure; (b) common rail pressure; (c) engine speed; (d) control signal duty cycle.
Figure 4: AMESim-MATLAB co-simulation interface.
Simulink solver. As for the latter, which is the case
considered in this paper, AMESim and Simulink co-
operate by integrating the relevant portions of models,
as shown in figure 4.
The GPC controller was tuned referring to models
linearized at the starting equilibrium point, according
to design steps of Section 5. The test considered ramp
variations of the engine speed and load, for the system
controlled by a GPC with a N = 5 (0.5s) prediction
horizon. The input air pressure from the compres-
sor was always 30bar. The rail pressure reference was
read from a static map depending on the working con-
dition and had a sort of ramp profile as well. The final
design step consisted in the application of the GPC
control law to the real system.
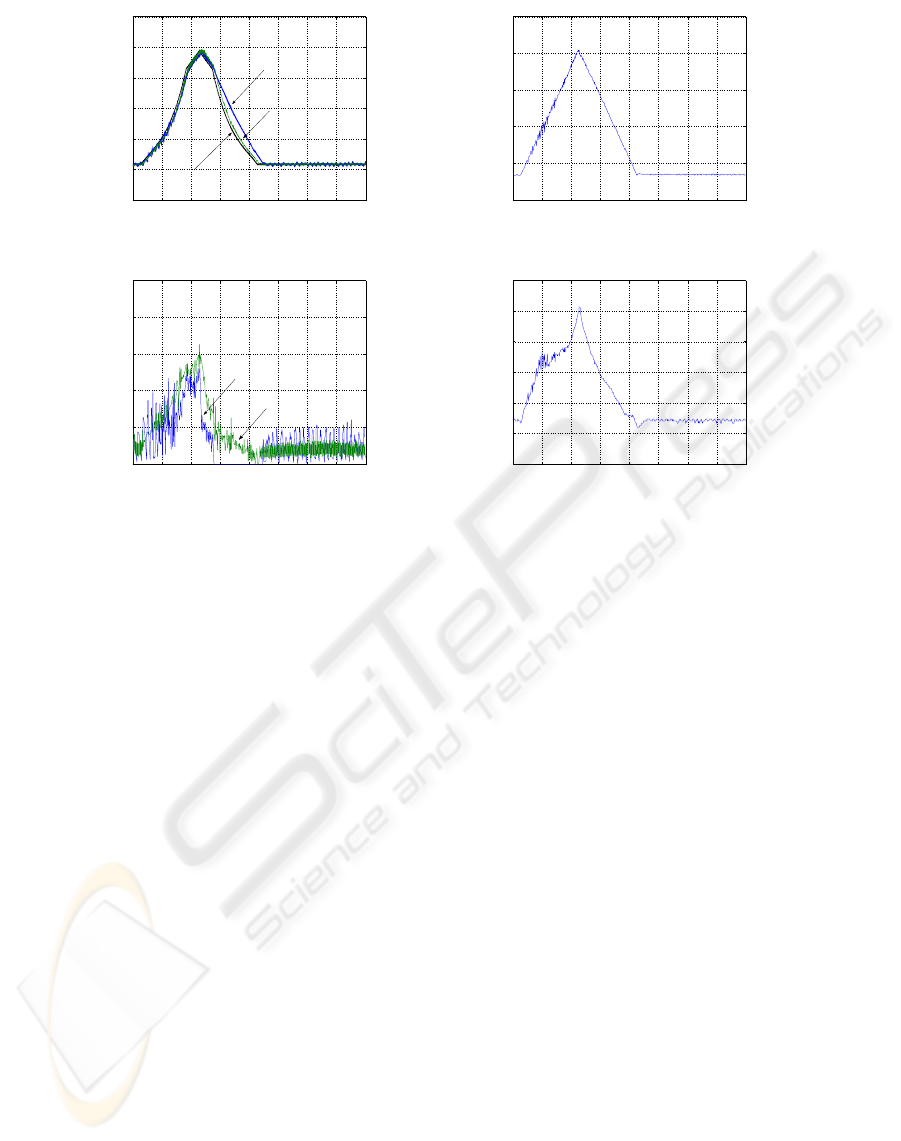
In Fig. 5, the engine speed accelerates
from 1100rpm to 1800rpm and then decelerates to
1100rpm, within a 20s time interval (Fig. 5(b)).
The control action applied to the real system guar-
antees a good reference tracking, provided that its
slope does not exceed a certain value (Fig. 5(a), time
intervals [0, 14] and [22, 40]). Starting from time
14s, the request of a quick pressure reduction causes
the control action to close the valve completely (Fig.
5(c)) by imposing a duty cycle equal to 0. Thanks to
injections, the rail pressure (Fig. 5(a)) decreases to
the final 5bar reference value, with a time constant
depending on the system geometry; the maximum er-
ror amplitude cannot be reduced due to the actuation
variable saturation. Fig. 5(d) shows the injectors’ ex-
citing time during the experiment. It is worth to note
that simulation and experimental results are in good
accordance, supporting the proposed approach.
7 CONCLUSIONS
In this paper, we presented a procedure for integrat-
ing different models and tools for a reliable design,
optimization and analysis of a mechatronic system as
a whole, encompassing the real process and the con-
trol system. The effectiveness of the methodology has
been illustrated by introducing a practical case study
involving the CNG injection system for internal com-
INTEGRATED DESIGN OF A MECHATRONIC SYSTEM - The Pressure Control in Common Rails
17
0 5 10 15 20 25 30 35 40
4
8
12
16
20
24
Time [s]
Rail Pressure [bar]
experimental pressure
pressure reference
simulated pressure
(a)
0 5 10 15 20 25 30 35 40
1
1.2
1.4
1.6
1.8
2
Time [s]
Engine Speed [rpm x 1000]
(b)
0 5 10 15 20 25 30 35 40
0
10
20
30
40
50
Time [s]
duty cycle [%]
experimental duty cycle
simulated duty cycle
(c)
0 5 10 15 20 25 30 35 40
0
5
10
15
20
25
30
Time [s]
Injection Timing [ms]
(d)
Figure 5: AMESim model and real system responses for speed and load ramp variations and a 30bar input pressure, when
controlled by a GPC with N = 5; (a) common rail pressure; (b) engine speed (c) duty cycle; (d) injectors exciting time interval.
bustion engines. The design process was organized
in few steps: analysis of different candidate configu-
rations carried out with the help of virtual prototypes
developed in the AMESim environment; design and
performance evaluation of controllers designed on a
simpler model of the plant employing the virtual pro-
totypes; validation of the control law on the real sys-
tem. The implementation of the control law on the
real system represented a benchmark for the evalua-
tion of performances of the approach. Experimental
results gave a feedback of benefits of the integration
of the mechanical and control subsystems design, and
proved the validity of the methodology.
REFERENCES
Ferretti, G., Magnani, G., and Rocco, P. (2004). Virtual
Prototyping of Mechatronic Systems. Annual Reviews
in Control, (28):193206.
Lino, P., Maione, B., Amorese, C., and DeMatthaeis, S.
(2006). Modeling and Predictive Control of a New In-
jection System for Compressed Natural Gas Engines.
In IEEE CCA 2006 International Conference, Mu-
nich, Germany.
Maione, B., Lino, P., DeMatthaeis, S., Amorese, C., Man-
odoro, D., and Ricco, R. (2004). Modeling and Con-
trol of a Compressed Natural Gas Injection System.
WSEAS Transactions on Systems, 3(5):2164–2169.
Paynter, H. (1960). Analysis and Design of Engineering
Systems. M.I.T. Press, Cambridge, MA.
Rossiter, J. (2003). Model-Based Predictive Control: a
Practical Approach. CRC Press, New York.
Stobart, R., A.May, Challen, B., and Morel, T. (1999). New
Tools for Engine Control System Development. An-
nual Reviews in Control, (23):109–116.
Streeter, V., Wylie, K., and Bedford, E. (1998). Fluid Me-
chanics. McGraw-Hill, New York, 9th edition.
IMAGINE S.A. (2004). AMESim User Manual v4.2.
Roanne, France.
van Amerongen, J. and Breedveld, P. (2003). Modelling
of Physical Systems for the Design and Control of
Mechatronic Systems. Annual Reviews in Control,
(27):87–117.
Zucrow, M. and Hoffman, J. (1976). Gas Dynamics. John
Wiley & Sons, New York.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
18
