
CHANGE-POINT DETECTION WITH SUPERVISED LEARNING
AND FEATURE SELECTION
Victor Eruhimov, Vladimir Martyanov, Eugene Tuv
Intel, Analysis and Control Technology, Chandler, AZ, U.S.A.
George C. Runger
Industrial Engineering, Arizona State University, Tempe, AZ, U.S.A.
Keywords:
Data streams, ensembles, variable importance, multivariate control.
Abstract:
Data streams with high dimensions are more and more common as data sets become wider. Time segments
of stable system performance are often interrupted with change events. The change-point problem is to detect
such changes and identify attributes that contribute to the change. Existing methods focus on detecting a
single (or few) change-point in a univariate (or low-dimensional) process. We consider the important high-
dimensional multivariate case with multiple change-points and without an assumed distribution. The problem
is transformed to a supervised learning problem with time as the output response and the process variables as
inputs. This opens the problem to a wide set of supervised learning tools. Feature selection methods are used
to identify the subset of variables that change. An illustrative example illustrates the method in an important
type of application.
1 INTRODUCTION
Data streams with high dimensions are more and
more common as data sets become wider (with more
measured attributes). A canonical example are nu-
merous sensors (dozens to hundreds) with measure-
ments generated from each over time. Many charac-
teristics can be of interest from a system that gener-
ates such data, but one systemic question is whether
the system has been stable over a time period, or
whether one of more changes occurred. In a change-
point problem, historical data from streams is re-
viewed retrospectively over a specified time period to
identify a potential change, as well as the time of the
change. This historical analysis differs from real-time
monitoring where the goal is to detect a change as
soon as it occurs.
Change points are of interest in areas as diverse
as marketing, economics, medicine, biology, mete-
orology, and even geology (where the data streams
represent data over depths rather than over time). In
medicine, a change-point model can be used to detect
whether the application of a stimulus affects the re-
action of individual neurons (Belisle et al., 1998). In
the study of earthquakes, it is of interest to distinguish
one seismicity from another (Pievatolo and Rotondi,
2000).
Modern data streams often must handle high di-
mensions. A common approach is to use a multi-
variate control chart for process monitoring such as
Hotelling’s T
2
control chart (Hotelling, 1947). This
is a widely-used multivariate control chart to moni-
tor the mean vector of a process based on the Ma-
halanobis distance of the current data vector from a
historical mean data vector. The distance measure
used in T
2
incorporates the correlations among the
attributes that are measured. However, because this
distance measure is fundamentally based on a sum of
squared deviations of the elements of the current vec-
tor, it loses sensitivity to change points that occur in
only one or a few attributes among many (and result
in small changes in Mahalanobis distance). More sen-
sitive extensions were developed for real-time moni-
toring such as a multivariate exponentially weighted
moving average control charts (MEWMA) (Lowry et
al. 1992), and a multivariate cumulative sum control
charts (MCUSUM) (Runger and Testik 2004). These
extensions are still based on sums of squares with the
previously mentioned, intrinsic limitations as the di-
mension increases.
359
Eruhimov V., Martyanov V., Tuv E. and C. Runger G. (2007).
CHANGE-POINT DETECTION WITH SUPERVISED LEARNING AND FEATURE SELECTION.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 359-363
DOI: 10.5220/0001631303590363
Copyright
c
SciTePress

The objective here is to handle the high-
dimensional, complex data that is common in mod-
ern sensed systems, and still detect change point that
might occur in only one (or a few) variable among
hundreds. Consequently, we present a two-phased ap-
proach. In the first phase we identify the attributes re-
sponsible for the change point. With a much smaller
subset of attributes to work with in the second phase,
simpler methods can be used to identify the time(s)
at which the change(s) occur. The first phase uses a
novel transformation of the problem to one of super-
vised learning. Such a transformation was explored
by (Li et al., 2006). The work here adds a second
phase, uses a much more powerful feature selection
algorithm, and provides a more challenging example.
In Section 2 the change-point problem is transformed
to a supervised learning problem. Section 3 discusses
feature selection. Section 4 provides a realistic exam-
ple.
2 CHANGE POINTS WITH
SUPERVISED LEARNING
A supervised learning model requires a response or
target variable for the learning. However, no ob-
vious target is present in a change-point problem.
Still, a key element of a data stream is the time at-
tribute that provides an ordering for the measured vec-
tors. In a stationary data stream without any change
points, no relationship is expected between time and
the measured attributes. Conversely, if the distribu-
tion changes over time, such change should allow for
a relationship to be detected between the measured at-
tributes and time (Li et al., 2006). Consequently, our
approach is to attempt to learn a model to predict time
from the measurements in the data stream
t = g(x
1
, ..., x
p
) (1)
where t is the time of an observation vector and g()
is our learned model. If the time attribute can be pre-
dicted, a change in the measurement vectors is avail-
able to predict. Attributes that are scored to be im-
portant to this model are the subset of important vari-
ables. Consequently, phase one of our analysis can be
completed from this model and its interrogation. Any
number of change points can occur in this framework.
A more direct approach might attempt to model
each attribute as a function of time such as x
j
= g(t)
for j = 1, 2, . . . , p. However, separate models do
not use the relationships among the variables. A
change might break the relationships between vari-
ables within a significance difference in each variable
individually. Common examples in data streams de-
pict points that are not unusual for any attribute indi-
vidually, but jointly depict an important change.
Any monotonic function of time can be used as
the target attribute for the learner. The identify func-
tion used here is a simple choice and other functions
can be used to highlight or degrade the detection of
change points in different time periods. Also, any one
of many supervised learners can be applied. Our goal
is to detect a subset of important variables and this is
the primary purpose for our following selection.
Because we are most interested in an abrupt
change in the mean of one or more attributes in the
data stream it is sensible to use a supervised learner
that can take advantage of such an event in the sys-
tem. Furthermore, the phase one objective is to iden-
tify the important variables. Consequently, decision
trees are used as the base learners because they can
effectively use a mean change in only one or few pre-
dictor attributes. They also have intrinsic measures of
variable importance. Ensembles of decision trees are
used to improve the measure of variable importance
for the phase one objective.
3 FEATURE SELECTION
If an attribute changes over time, it should be more
useful to predict time than an attribute that is sta-
tistically stable. Consequently, the phase to iden-
tify changed attributes is based on a feature selection
method for a supervised learner. There are several ap-
proaches such as filter, wrapper, and embedded meth-
ods. An overview of feature selection was provided
by (Guyon and Elisseeff, 2003) and other other pub-
lications in the same issue. Also see (Liu and Yu,
2005). The feature selection phase needs to process
hundreds of attributes and potentially detect a contri-
bution of a few to the model to predict time. Fur-
thermore, in the type of applications of interest here,
the attributes are often related (redundant). Conse-
quently, the effect of one attribute on the model can
be masked by another. Moderate to strong interactive
effects are also expected among the attributes. Conse-
quently, a feature selection methods need high sensi-
tivity and the ability to handle masking and interactive
effects. We use a feature selection methods based on
ensembles of decision trees.
Tree learner are fast, scalable, and able to handle
complex interactive effects and dirty data. However,
the greedy algorithm in a single tree generates an un-
stable model. A modest change to the input data can
make a large change to the model. Supervised ensem-
ble methods construct a set of simple models (called
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
360

base learners) and use their vote to predict new data.
Numerous empirical studies confirm that ensemble
methods often outperform any single base learner
(Freund and Schapire, 1996), (Dietterich, 2000). En-
sembles can be constructed as parallel or serial collec-
tions of base learners. A parallel ensemble combines
independently constructed base learners. Because dif-
ferent errors can cancel each other, an ensemble of
such base learners can outperform any single one of
its components (Hansen and Salamon, 1990), (Amit
and Geman, 1997). Parallel ensembles are often ap-
plied to high-variance base learners (such as trees).
(Valentini and Dietterich, 2003) showed that ensem-
bles of low-bias support vector machines (SVMs) of-
ten outperformed a single, best-tuned, canonical SVM
(Boser et al., 1992).
A well-known example of a parallel ensemble is
a random forest (RF) (Breiman, 2001). It uses sub-
sampling and to build a collection of trees and injects
additional randomness through a random selection of
variable candidates of each node of each tree. The
forest can be considered a more sophisticated bag-
ging method (Breiman, 1996). It is related to random
subspace method of (Ho, 1998). A forest of random
decision trees are grown on bagged samples with per-
oformance comparable to the best known classifiers.
Given M predictors a RF can be summarized as fol-
lows: (1) Grow each tree on a bootstrap sample of the
training set to maximum depth, (2) Select at random
m < M predictors at each node, and (3) Use the best
split selected from the possible splits on these m vari-
ables. Note that for every tree grown in RF, about one-
third of the cases are out-of-bag (out of the bootstrap
sample). The out-of-bag (OOB) samples can serve as
a test set for the tree grown on the non-OOB data.
In serial ensembles, every new learner is based
on the prediction errors from previously built learners
so that the weighted combination forms an accurate
model. A serial ensemble results in an additive model
built by a forward-stagewise algorithm and Adaboost
introduced by (Freund and Schapire, 1996) is the best-
known example.
Neither parallel nor serial ensembles alone are
sufficient to generate an adequate best subset model
that accounts for masking, and detects more subtle
effects. A simple example by (Tuv, 2006) illustrated
this. In some cases, weak but independent predictors
are incorrectly promoted in the presence of strong, but
related predictors. In other cases the weak predictors
are not detected. An integrated solution is expected
to provide advantages and several concepts described
previously were integrated into a best subset selection
algorithm by (Tuv et al., 2007). Only a brief summary
is provided here. The best-subset algorithm contains
the following steps:
1. Variable importance scores are computed from a
parallel RF ensemble. Each tree uses a fixed depth
of 3-6 levels. There are some modified calcula-
tions based on OOB sample that are described in
more detail by (Tuv et al., 2007).
2. Noise variables are created through a random per-
mutation of each column of the actual data. Be-
cause of this random permutation, the noise vari-
ables are known to not be associated with the tar-
get. The noise variables are used to set a thresh-
old for statistically significant variable importance
scores to select important (relevant) variables
3. Within decision trees, surrogate scores can be cal-
culated from the association between the primary
splitter at a node and other potential splitters. The
details were originally provided by (?). These sur-
rogate scores describe how closely an alternative
splitter can mach the primary. This is turn pro-
vides a measure of masking between these vari-
ables. When such scores are combined from all
nodes in a tree and all trees in an ensemble, a ro-
bust metric for variable masking can be obtained.
A masking matrix is computed and noise variables
are again used to determine significance thresh-
olds. A set of short serial ensemble is used.
4. Masked variables are removed from the list of im-
portant variables
5. The target is adjusted for the currently identi-
fied important variables, and the algorithm is re-
peated. The adjustment calculates generalized
residuals that apply to either regression of classifi-
cation problems. Less important variables can be
more clearly identified once the dominant contrib-
utors are eliminated. Trees-based models are not
well-suited for additive models and the iteration
substantially improves the performance in these
cases.
4 ILLUSTRATIVE EXAMPLE
Because change-point detection is an unsupervised
learning task, simulated data is used with known
change points inserted. A data set to mimic a real
manufacturing environment includes 10 sensors that
each generate time series (with 100 time data points)
from given distributions. Each time series could be
represented as a trapezoid with added curvatures, an
oscillation with random phase in the center, and Gaus-
sian noise on the order of 10% of the signal. Cur-
vatures and the center oscillation phase are sampled
CHANGE-POINT DETECTION WITH SUPERVISED LEARNING AND FEATURE SELECTION
361

from fixed uniform distributions. This set of time se-
ries provides the results for one batch and the objec-
tive is to detect changes in a series of batches. The
dataset consists of 10000 batches and each 1000 sam-
ples there is a change induced by a shift in one of
internal parameters used to generate time series by its
standard deviation.
Such high-dimensional data can be analyzed di-
rectly, or a different representation can be used to ex-
tract features that might be of interest. For example,
Fourier transforms, discrete wavelet transforms, and
orthogonal polynomials are only a few of the methods
to represent high-dimensional data. Without a priori
information of features affected by a change point, the
set of features is extracted from these methods is still
often quite large.
Chebyshev polynomials are used here to repre-
sent this high-dimensional data. The representation
is y(x) = T
n
(x) where T
n
(x) by definition is a poly-
nomial solution of degree n of the equation
(1 − x
2
)
d
2
y
dx
2
− x
dy
dx
+ n
2
y = 0, (2)
where |x| ≤ 1 and n is a non-negative integer.
For n = 0 T
0
(x) = 1. Chebyshev polynomials
can also be calculated using one of useful proper-
ties: T
n+1
(x) = 2xT
n
(x) − T
n−1
(x) and T
n
(x) =
cos(n · cos
−1
(x)).
A set of Chebyshev polynomials {T
n
(x)}
n=0,1,...
is orthogonal with respect to the weighting function
(1 − x
2
)
−1/2
:
1
Z
−1
T
m
(x)T
n
(x)dx
√
1 − x
2
=
1
2
π δ
nm
,n>0,m>0
π ,n =0,m =0
, (3)
where δ
mn
is the Kronecker delta.
Using the last property we can represent any
piecewise continuous function f(x) in the interval
−1 ≤ x ≤ 1 as a linear combination of Chebyshev
polynomials:
∞
X
0
C
n
T
n
(x) =
f(x),where f (x) is continuous
f (x−0)+f(x+0)
2
in discontinuity points
(4)
Here
C
n
=
A
π
1
R
−1
f(x)T
n
(x)dx
√
1−x
2
,
A =
1, n = 0
2, n > 0
.
(5)
For a function {f
i
}
i=1,...,P
defined on a discrete
domain we calculate the coefficients of the Chebyshev
decomposition using a straightforward formula:
C
n
=
A
π
T
X
i=1
f
i
T
n
(x
i
)
p
1 − x
2
i
, (6)
where x
i
= −1 +
2
P
(i −
1
2
). Therefore, the coeffi-
cients {C
n
} become the features for the change-point
detection. We use first 25 coefficients for each time
series resulting in 250 features for each sample.
In the first phase of the analysis the feature selec-
tion algorithm simply uses a sequential batch index as
the target. The polynomial coefficients provide the in-
puts. The feature selection module identifies the dis-
tribution change and a set of features responsible for
the change.
In the second phase, moving T
2
statistics are
calculated using only the selected features between
n
1
/n
2
-samples prior/after the current data point, cor-
respondingly, to detect the change points:
T
2
=
n
1
n
2
(n
1
+ n
2
− 2)
n
1
+ n
2
(
y
1
− y
2
)
′
W
−1
(y
1
− y
2
) ,
(7)
where
W =
n
1
X
j=1
(y
1j
−
y
1
) (y
1j
− y
1
)
′
(8)
+
n
2
X
j=1
(y
2j
−
y
2
) (y
2j
− y
2
)
′
.
In the second phase, moving T
2
statistics are
calculated using only the selected features between
n
1
/n
2
-samples prior/after the current data point, cor-
respondingly, to detect the change points:
T
2
=
n
1
n
2
(n
1
+ n
2
− 2)
n
1
+ n
2
(
y
1
− y
2
)
′
W
−1
(y
1
− y
2
) ,
(9)
where
W =
n
1
X
j=1
(y
1j
−
y
1
) (y
1j
− y
1
)
′
(10)
+
n
2
X
j=1
(y
2j
−
y
2
) (y
2j
− y
2
)
′
.
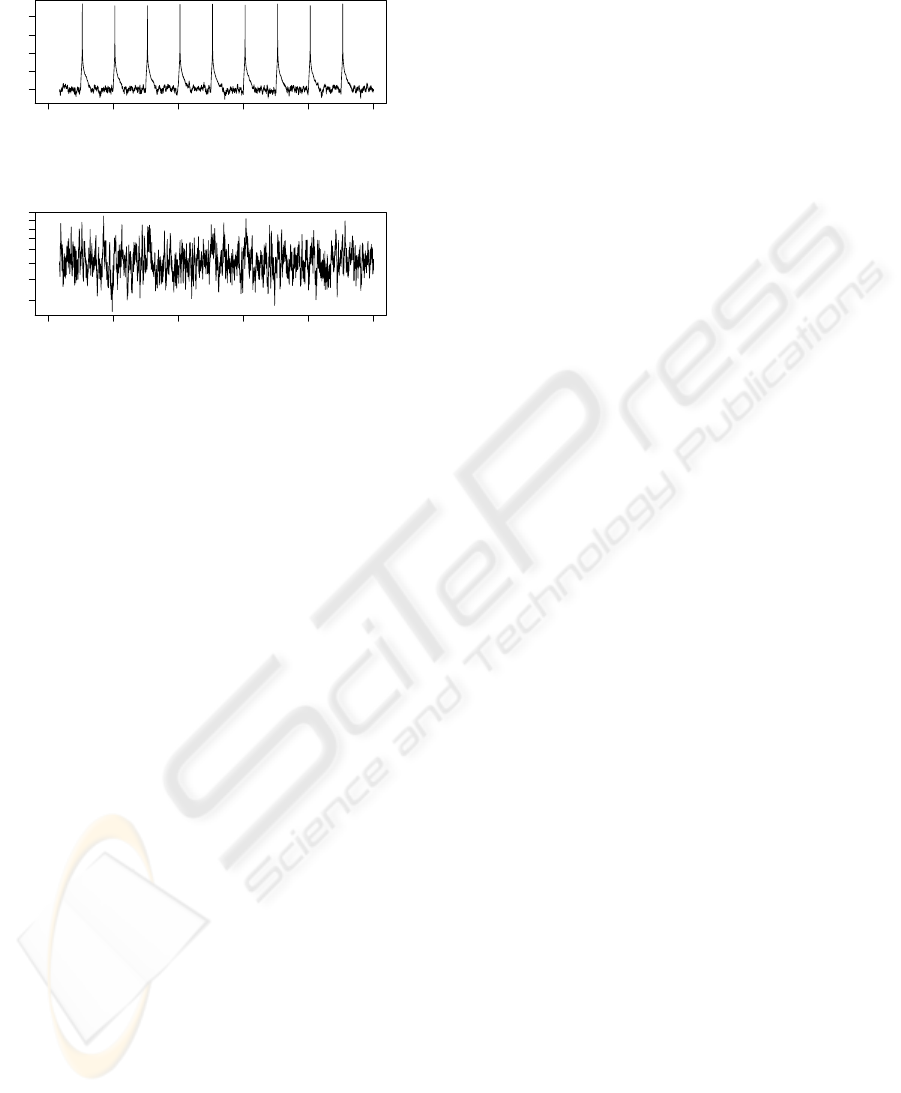
We retrain a model with each 200 samples using
all samples from the previous detected change point
until the current sample. We do not make predictions
on the first 100 samples in the beginning and after
a change point. The results are shown in Figure 1.
Here T
2
is shown with feature selection in the top fig-
ure and without feature selection in the bottom figure.
Notice that changes are not detected before feature
selection improves the sensitivity of the control chart.
After feature selection the changes are apparent.
5 CONCLUSIONS
As sensors continue to flourish in numerous disci-
plines, high-dimensional data becomes more com-
mon. Furthermore, the ability to detect changes in
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
362
0 2000 4000 6000 8000 10000
1 10 1000
sample index
T2, selected variables
0 2000 4000 6000 8000 10000
0.6 1.0 1.4 2.0
sample index
T2, all variables
Figure 1: Time series plot of T
2
with (top) and without
(bottom) feature selection.
a system or process over time remains an important
need in many applications. The results here illustrate
the success of a solution that integrates several impor-
tant elements. The transform of the inherently unsu-
pervised learning problem of change-point detection
to one of supervised learning with a time index as the
response, opens the analysis to a wide collection o
tools. A sophisticated feature selection algorithm can
then be applied to detect attributes that contribute to
a change. In the lower-dimensional space of these at-
tributes, the change point detection is a much sim-
pler problem and a number of simpler tools can be
applied. We uses a multivariate T
2
control chart, but
other control charts, or methodologies can be consid-
ered after the important dimensional reduction. The
illustrative example presents an simulation of an im-
portant practical case. One needs to summarize the
information from multiple time series. Consequently,
the dimensional space equals the number of series
times the length of each series and the feature selec-
tion becomes critical, and the example illustrates an
effective solution method for this problem.
ACKNOWLEDGEMENTS
This material is based upon work supported by
the National Science Foundation under Grant No.
0355575.
REFERENCES
Amit, Y. and Geman, D. (1997). Shape quantization and
recognition with randomized trees. Neural Computa-
tion, 9(7):1545–1588.
Belisle, P., Joseph, L., Macgibbon, B., Wolfson, D. B., and
Berger, R. D. (1998). Change-point analysis of neuron
spike train data. Biometrics, 54:113–123.
Boser, B., Guyon, I., and Vapnik, V. (1992). A training
algorithm for optimal margin classifiers. In Haussler,
D., editor, 5th Annual ACM Workshop on COLT, Pitts-
burgh, PA, pages 144–152. ACM Press.
Breiman, L. (1996). Bagging predictors. Machine Learn-
ing, 24(2):123–140.
Breiman, L. (2001). Statistical modeling: The two cultures.
Statistical Science, 16(3):199–231.
Dietterich, T. G. (2000). An experimental comparison of
three methods for constructing ensembles of decision
trees: Bagging, boosting, and randomization. Ma-
chine Learning, 40(2):139–157.
Freund, Y. and Schapire, R. E. (1996). Experiments with
a new boosting algorithm. In the 13th International
Conference on Machine Learning, pages 148–156.
Morgan Kaufman.
Guyon, I. and Elisseeff, A. (2003). An introduction to vari-
able and feature selection. Journal of Machine Learn-
ing Research, 3:1157–1182.
Hansen, L. K. and Salamon, P. (1990). Neural network en-
sembles. IEEE Trans. on Pattern Analysis and Ma-
chine Intelligence, 12(10):993–1001.
Ho, T. K. (1998). The random subspace method for con-
structing decision forests. IEEE Trans. on Pattern
Analysis and Machine Intelligence, 20(8):832–844.
Hotelling, H. (1947). Multivariate quality control-
illustrated by the air testing of sample bombsights.
Techniques of Statistical Analysis, pages 111–184.
Li, F., Runger, G. C., and Tuv, E. (2006). Supervised
learning for change-point detection. IIE Transactions,
44(14-15):2853–2868.
Liu, H. and Yu, L. (2005). Toward integrating feature selec-
tion algorithms for classification and clustering. IEEE
Trans. Knowledge and Data Eng., 17(4):491–502.
Pievatolo, A. and Rotondi, R. (2000). Analysing the
interevent time distribution to identify seismicity
phases: a bayesian nonparametric approach to the
multiple change-points problem. Applied Statistics,
49(4):543–562.
Tuv, E. (2006). Ensemble learning and feature selection.
In Guyon, I., Gunn, S., Nikravesh, M., and Zadeh, L.,
editors, Feature Extraction, Foundations and Applica-
tions. Springer.
Tuv, E., Borisov, A., Runger, G., and Torkkola, K. (2007).
Best subset feature selection with ensembles, artificial
variables, and redundancy elimination. Journal of Ma-
chine Learning Research. submitted.
Valentini, G. and Dietterich, T. (2003). Low bias bagged
support vector machines. In ICML 2003, pages 752–
759.
CHANGE-POINT DETECTION WITH SUPERVISED LEARNING AND FEATURE SELECTION
363
