
METHODOLOGY FOR LEARNING VISUAL REACTIVE
BEHAVIOURS IN ROBOTICS THROUGH REINFORCEMENT AND
IMAGE-BASED STATES
Pablo Quint
´
ıa, Jos
´
e E. Domenech, Cristina Gamallo and Carlos V. Regueiro
Facultad de Inform
´
atica, Universidad de A Coru
˜
na, 15071 A Coru
˜
na, Spain
Keywords:
Reinforcement Learning, Mobile Robotics, Artificial Vision, Visual Reactive Behaviours, Motivation.
Abstract:
This article describes the development of a methodology for the learning of visual and reactive behaviours
using reinforcement learning. With the use of artificial vision the environment is perceived in 3D, and it
is possible to avoid obstacles that are invisible to other sensors that are more common in mobile robotics.
Reinforcement learning reduces the need for intervention in behaviour design, and simplifies its adjustment to
the environment, the robot and the task. The designed methodology is intended to be general; thus, in order
to change the desired behaviour, only the reinforcement and the filtering of the image need to be changed.
For the definition of the reinforcement a laser sensor is used, and for the definition of the states a fixed 3x3
grid is used. The behaviours learned were wall following, object following, corridor following and platform
following. Results are presented with a Pioneer 2 AT. A Gazebo 3D simulator was used for the Learning and
testing phase, and a test of the wall following behaviour was carried out in a real environment.
1 INTRODUCTION
The design and implementation of reactive be-
haviours for the control of autonomous mobile robots
has been shown to be one of the most efficient ways
of carrying out low-level tasks. These require a very
short response time and continuous interaction with
the environment, which is almost totally unknown,
complex and dynamic. Thus arises the challenge of
specifying how each one should be implemented.
One of the most promising techniques is rein-
forcement learning (RL) (Mill
´
an et al., 2002; Wyatt,
1995), one of the principal advantages of which is that
it minimizes interaction with the designer, since only
the set of states and actions and the reinforcement has
to be established. There is no need to identify all
the situations in which the robot may find itself, nor
the action to be implemented in each of them; only
whether the result of the action is acceptable or not
need be stated.
This work describes the design and implementa-
tion of four visual behaviours using a single camera,
with the aim of studying the feasibility of the project
and enabling a simple, economical implementation.
The results obtained are generalisable, with the possi-
ble exception of the discrimination between floor and
obstacles. This perception would be more robust and
efficient if in-depth information were used.
We now comment on related work and go on to de-
scribe the TTD(λ) - Q-learning algorithm and its ap-
plication to the four behaviours chosen. We then show
the results obtained in simulation. For this phase the
multirobot simulator Player/Stage/Gazebo was cho-
sen as it is highly generalized, it supports the Pioneer
2-AT mobile robot, and simulates in 3-D (Gazebo).
Lastly, we finish off with a conclusions and future
work section.
2 RELATED WORK
Only a small number of studies have used vision as
the principal sensorial input for visual behaviours in
a mobile robot. This is probably due to the high cost
associated with processing visual information (Naka-
mura and Asada, 1995).
In some works, reinforcement is used to learn vi-
sual behaviours that are similar to wall following (e.g.
149
Quintía P., E. Domenech J., Gamallo C. and V. Regueiro C. (2007).
METHODOLOGY FOR LEARNING VISUAL REACTIVE BEHAVIOURS IN ROBOTICS THROUGH REINFORCEMENT AND IMAGE-BASED STATES.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 149-156
DOI: 10.5220/0001628901490156
Copyright
c
SciTePress

servoing and wandering), but which are simpler as
there is no need to maintain a distance from the wall
the robot is following. Gaskett et al. (Gaskett et al.,
2000) use an improved version of Q-learning (“Ad-
vantage Learning”) which handles continuous states
and actions thanks to neural networks.
Another implementation of visual servoing be-
haviour can be found in (Mart
´
ınez-Mar
´
ın and Duck-
ett, 2005). The algorithm used is another variant of Q-
learning that permits real-time learning. Unlike in the
present work, the state of the agent is defined by the
position of the camera (inclination and angle of turn)
focused on the objective, and not by the image. Thus,
active vision is required, along with a perfect identifi-
cation of the objective, which is not always possible.
It is also difficult to use the same system to implement
more than one behaviour simultaneously.
A similar, but more complete, general approach
was taken in (Boada et al., 2002). This system learns
basic behaviours (watching and orientation) for con-
trolling a pan-tilt unit and the robot, and combines
them to obtain complex ones (approach). Neverthe-
less, they need to detect and identify the objective,
which is very difficult with a wall, a corridor or a plat-
form. Once again, states were not defined directly by
the image.
Ruiz et al. (Ruiz et al., 2005) have implemented
two visual behaviours. Their approach is based on
the detection of straight segments in the image, which
to a certain degree limits its mode of use. Moreover,
control is totally heuristic, with no type of learning.
Our approach is more general and is not conditioned
by the characteristics of the environment.
3 REINFORCEMENT LEARNING
Reinforcement learning (RL) is based on the use of
a qualification (reinforcement) of the agent’s actions
by the environment. The reinforcement does not in-
dicate the correct action (supervised learning), only
whether it has been satisfactory or not, and is not usu-
ally immediate in time. The situations of the agent are
usually codified into discrete states (s) in which vari-
ous actions (a) can be implemented (may be different
for each state).
A simple and intuitive definition of reinforcement
has been sought, as we believe that it is one of the
main advantages of this type of algorithm. Rein-
forcement indicates only those situations in which it
is highly probable that the robot has ceased to imple-
ment the task correctly (i.e. the robot is excessively
far from a wall), or has definitively carried it out badly
(the robot collides with an element in its environment
or is excessively close to one).
Learning consists of approximating a quality func-
tion Q(s, a). The optimal action in each state is the
one that maximizes its evaluations. The algorithm
chosen for this work is TTD(λ) - Q-learning, due to
it being based on the basic and simply Q-Learning al-
gorithm but applied to several states obtaining a faster
convergence time. The updating equation for the val-
uations is:
∆Q(s
t
,a
t
) = α[r
t
+γmax
a
Q(s
t+1
,a)− Q(s
t
,a
t
)]e
t
(s) ,
(1)
for all s
t
∈ S
n
where α is the learning coefficient, γ is
the reinforcement discount coefficient, S
n
is the set of
the n-last visited states and e
t
is the eligibility trace of
the state:
e
t
(s) =
γλe
t−1
(s) if s 6= s
t
,
1 if s = s
t
,
(2)
where λ is a decay parameter. Initial Q-values ∈
[−0,9,−1,0].
One drawback of Q-learning is the need to strike a
balance between exploration and exploitation. In or-
der to do so, the Softmax method (Moreno et al., 2004)
has been applied, where the probability of taking the
action a
i
in the state s at time t is:
Pr(s, a
i
) =
e
Q
t
(s,a
i
)/T
s
∑
n
j=1
e
Q
t
(s,a
j
)/T
s
, (3)
where {a
1
,....,a
n
} is the set of possible actions in the
state s and T
s
is the temperature associated to state s.
With temperature it is possible to regulate the
probability distribution between actions, and thus, the
balance between exploration and exploitation. Ini-
tially we start from a high temperature (greater ex-
ploration of actions) and this is progressively reduced
throughout the learning in order to principally select
those actions with the best evaluation.
Temperature is modified for each state in accor-
dance with the equation:
T (t) =
(
T
0
e
−
t
t
k
ln
T
0
k
if t ≤ t
k
,
k if t > t
k
,
(4)
where t is the number of times the current state has
appeared, T
0
is the ”initial” temperature, k is the min-
imum temperature (the state does not explore more
actions) and t
k
is the number of appearances that are
required for the temperature to reach k.
Table 1 shows a summary of the values used for
the parameters of the TTD(λ) - Q-learning algorithm.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
150
4 BEHAVIOURS
4.1 Common Aspects
On a reactive behaviour and with RL, each state must
contain all the information for selecting the next ac-
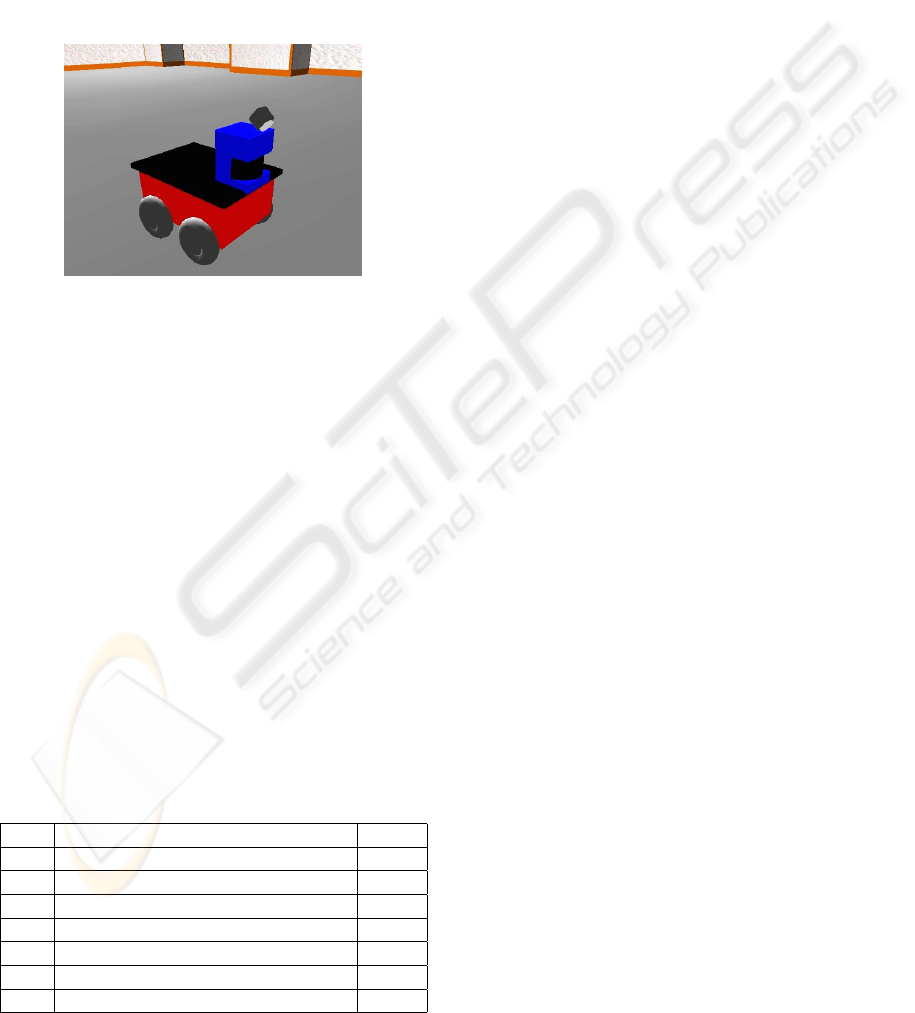
tion. After several tests the camera, which uses a 80
wide-angle lens, (Fig. 1) was placed 53 cm over the
robot and inclined 42 degrees towards the floor. Using
these values there is no need to change the position of
the camera for the different behaviours.
Figure 1: Position of the camera and the laser in the Gazebo
simulator.
The position of the laser depends on the reinforce-
ment wanted but, with the exception of the platform
following, the laser was placed over the front of the
robot, centred and parallel to the floor. For the plat-
form following behaviour it was inclined 45 degrees
towards the floor in order to detect the limits of the
platform. A SICK LMS 200 laser sensor was used.
4.1.1 State Space
As was to be expected, the definition of the state space
was critical in the development of this work, since it
has to respond to criteria that are at times conflicting.
On one hand, the space must be small, as convergence
time in RL increases exponentially with the number of
states. On the other hand, “perceptual aliasing” must
Table 1: Values used in this work for the TTD(λ) - Q-
learning algorithm.
Par. Description Value
α Learning coefficient 0.2
γ Reinforcement discount coefficient 0.99
T
0
Initial temperature 0.07
k Lower temperature limit 0.009
t
k
State exploration limit 500
λ Decay parameter 0.9
n Number of last visited states 3
be avoided; that is, the system should not classify two
situations in which the robot must execute very differ-
ent commands in the same state.
Lastly, due to the quantity of information gener-
ated by a camera, the image needs to be processed in
order to reduce the amount of pertinent information
(Nehmzow, 1999). In order to resolve these problems,
a simple, computationally efficient methodology has
been employed, which can be run in real time on a
mobile robot (Regueiro et al., 2006). This approach
is easily generalisable.
Firstly, with the exception of object following, the
image is processed with a Sobel edge enhancement
filter (Fig. 2(b)) to highlight the pertinent information:
obstacles (positive and negative) on the floor. This
floor detection process is highly sensitive to changes
in lighting and textures. Nevertheless, it can be im-
proved in different ways: with stereo vision, by cali-
brating the camera to detect the ground plane or by ap-
plying Machine-Learning techniques for ground de-
tection (Michels et al., 2005). For the object follow-
ing behaviour the image is processed to detect a spe-
cific colour (red was chosen). Then for each pixel its
red value is analysed, and if this exceeds a specified
threshold it is set to white, otherwise it is set to black.
Secondly, the image is divided into a grid made up
of 3 rows and 3 columns (Fig. 2(c)) for codification. A
cell is considered occupied if the percentage of edge
pixels reaches a given threshold. This step is essential
for avoiding “perceptual aliasing”. Thus defined, the
state space is 2
9
, and in order to reduce it, it is sup-
posed that if a cell in one of the columns is occupied,
all those cells above it are also occupied (Fig. 2(c)).
Hence the number of possible states is (3 + 1)
3
; i.e.
64. The state space may be further reduced, but dras-
tic modifications would be needed in the codification,
which would be difficult to justify.
4.1.2 Action Space
The action space was chosen in order to allow a flex-
ible behaviour, and at the same time avoid a series
of actions that would leave the robot immobile and
without negative reinforcement. One constraint of Q-
learning is that actions must be discrete. Hence, the
action space chosen is as in Table 2
4.2 Wall Following Behaviour
It has been shown that wall following behaviour is one
of the most useful when robots need to move reac-
tively and safely through their environment (Regueiro
et al., 2002). One of its advantages is that it only uses
local information, and it makes use of the topological
structure of the environment.
METHODOLOGY FOR LEARNING VISUAL REACTIVE BEHAVIOURS IN ROBOTICS THROUGH
REINFORCEMENT AND IMAGE-BASED STATES
151
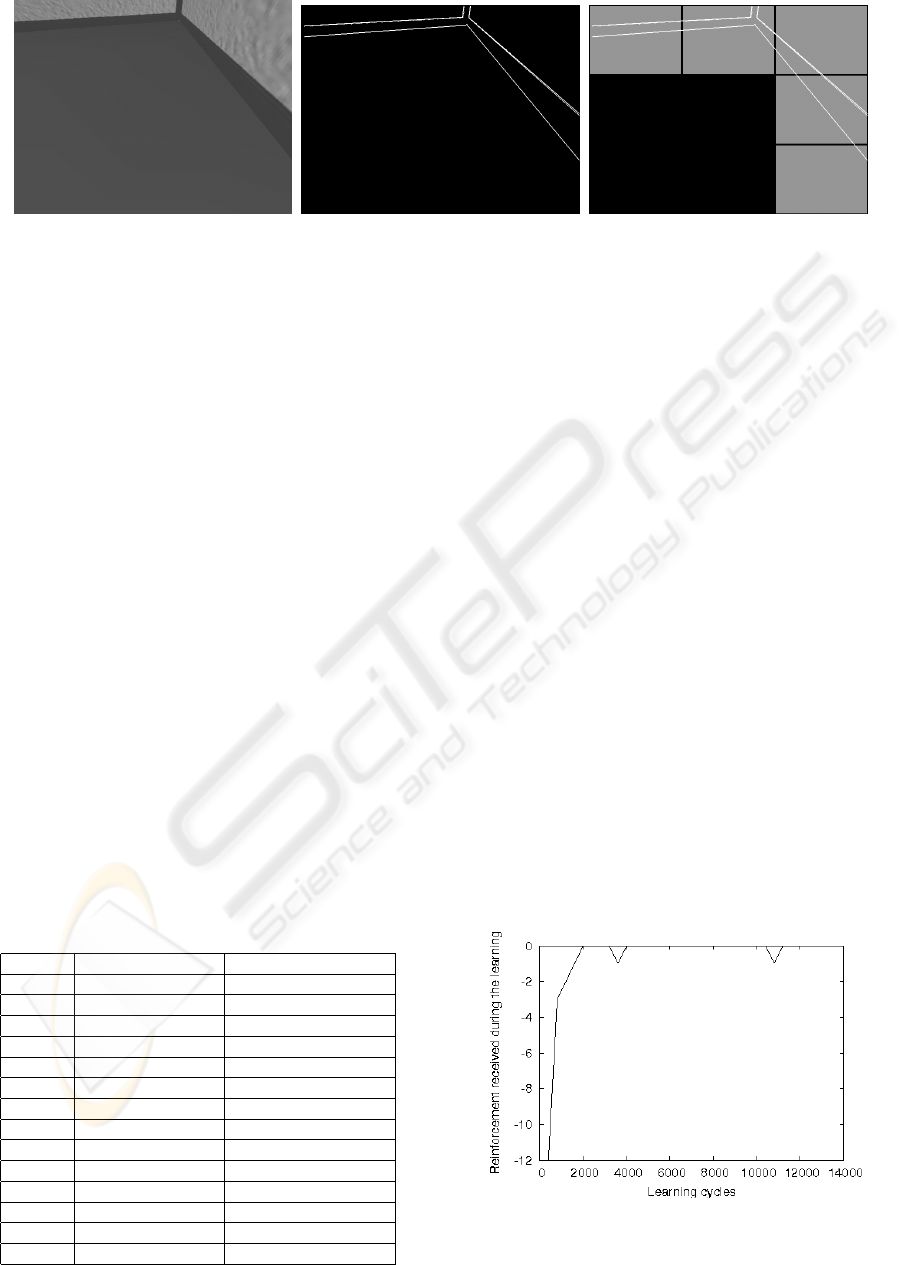
(a) (b) (c)
Figure 2: Determination of state with an image: a) original image; b) edge pixels (Sobel filter); and c) final codified state
(showing the codification grid and the free and occupied cells).
4.2.1 Definition of Reinforcement
The defined reward is always negative (-1), spurious
in time, and has two different components:
1. Close reinforcement: if any of the laser beams de-
tects an obstacle at 25 cm or less.
2. Far reinforcement: if the right-hand beam detects
a distance greater of 1 m.
The reinforcement has been defined in two ways:
1. Instant reinforcement: the reinforcement is ap-
plied when it finds a non desired situation. Used
with the close reinforcement.
2. Delayed reinforcement: the reinforcement is ap-
plied when a undesired situation persists over a
period of time. Used with the “far reinforcement”.
With delayed reinforcement the need to always
have a wall on the right side is relaxed and thus a more
robust behaviour is possible.
Table 2: Action space chosen.
Act. n. Linear speed m/s Angular speed rad/s
0 0.4 0.2
1 0.4 0
2 0.4 -0.2
3 0.2 0.8
4 0.2 0.6
5 0.2 0.4
6 0.2 0.2
7 0.2 0
8 0.2 -0.2
9 0.2 -0.4
10 0.2 -0.6
11 0.2 -0.8
12 0.05 0.8
13 0.05 -0.8
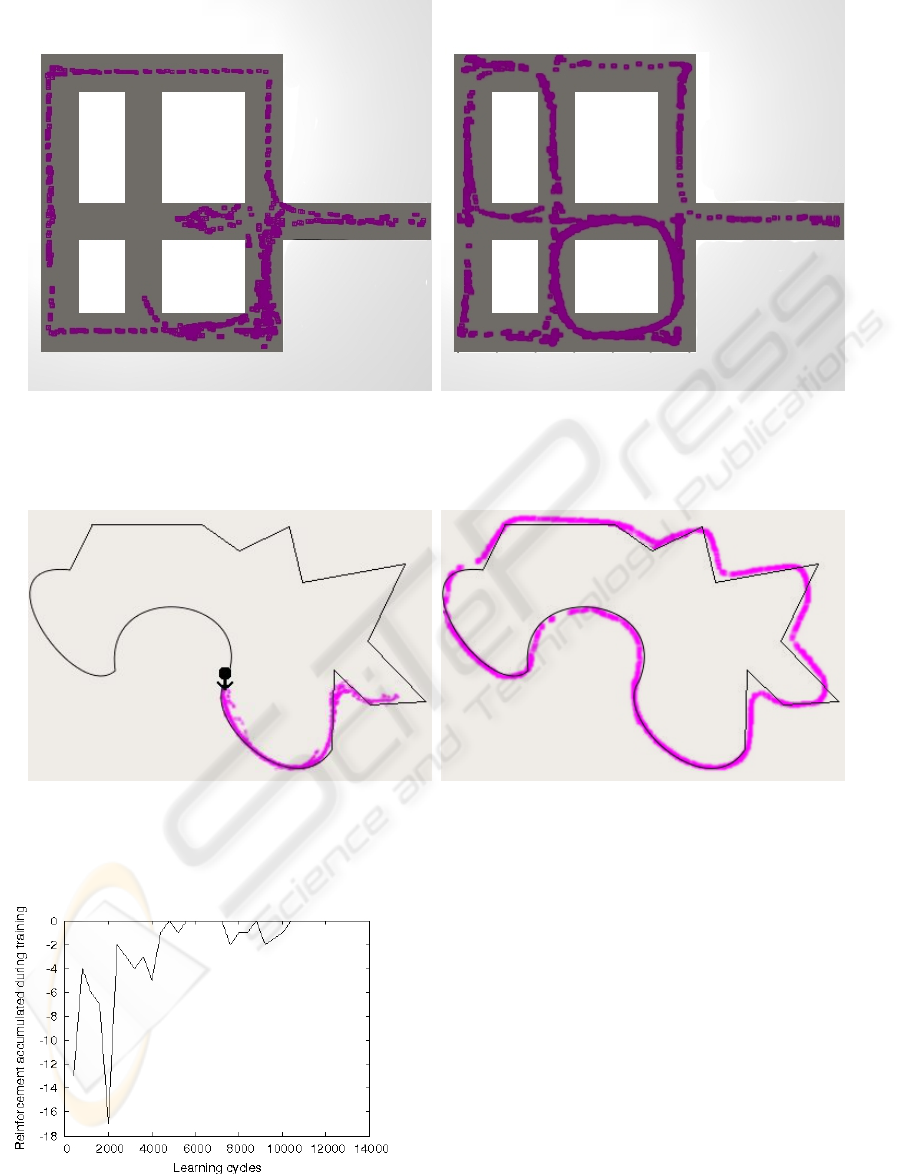
4.2.2 Results
The environment used is shown in Fig. 4(a).
Wall following behaviour belongs to the class of
continuous tasks which persist over time. This means
that they are not divided naturally into episodes, as
would be desirable for application of a reinforcement
algorithm. In order to avoid this drawback a rein-
forcement is generated after each serious system error
(collision or excessive distancing) and the robot exe-
cutes a recovery function which returns the robot to a
safe state.
Fig. 3 shows the reinforcement received during the
learning phase in TTD(λ). Each point represents the
reinforcement accumulated in the previous 400 learn-
ing cycles. Thus, the first point indicates that the rein-
forcement received since the onset of the experiment
up until 400 cycles has been -12, and so forth. The
learned Q-values are stored for their subsequent test-
ing.
As can be seen in the diagrams, the agent learns
the task in 2,000 learning cycles with TTD(λ) as op-
posed to 80,000 cycles obtained with Q-Learning al-
gorithm and 8x4 grid (Regueiro et al., 2006).
Figure 3: Reinforcement accumulated during the learning
of wall following behaviour.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
152
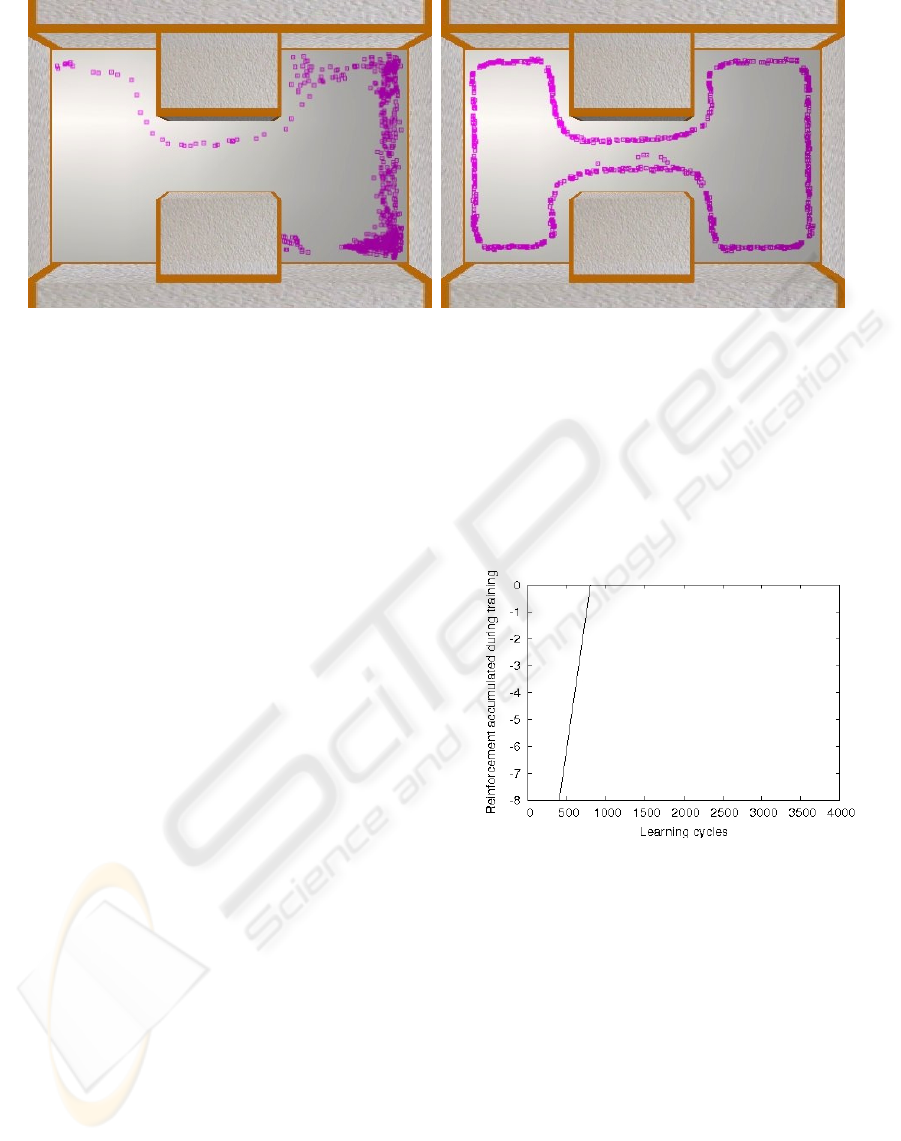
(a) (b)
Figure 4: Wall following behaviour: a) Trajectories obtained during initial stages; and b) Trajectories obtained during final
stages.
4.3 Corridor Following Behaviour
The corridor following behaviour is one of the sim-
plest behaviours to learn; nevertheless, when work-
ing with RL it has problems with decision selection
at crossroads. It simply makes no decision, as could
be expected from a reactive behaviour, thus the robot
cannot be ordered to go straight on or to turn at a
junction. Several positive reinforcements were used
to make the robot go straight on, but without success.
4.3.1 Definition of Reinforcement
Two classes of reinforcements were defined:
1. Critical reinforcement: if any of the laser beams
detects an obstacle at 25 cm or less the reward is
-1.
2. Speed reinforcement: used to favour the use of
straight and fast actions or/and penalise slow and
turning actions with values in [−0.4,0.3].
There were no significant variations in the final
behaviours with the use of speed reinforcement. We
have to mention that even when defining an erroneous
reinforcement the robot learned the correct behaviour.
4.3.2 Results
The environment used is shown in Fig. 6(a).
As has previously been mentioned, the final be-
haviours show a tendency to turn to right or left. The
example in Fig. 6(b) shows a tendency to turn left; if
not to straight on and then turn right. That is the rea-
son for the difference between turns to the left, where
the robot turns smoothly and passes close to the left
wall, and the right turns, where the robot tries to go
straight until the wall is directly in front of it.
Fig. 5 shows the reinforcement received during the
learning phase in TTD(λ). As can be seen in the dia-
grams, the agent learns the task in 800 learning cycles.
Figure 5: Reinforcement accumulated during the learning
of corridor following.
4.4 Platform Following Behaviour
The platform following behaviour is very similar to
the corridor following behaviour, but the laser sensor
points 45 degrees towards the ground, as it has to de-
tect uneven features in the floor. This behaviour also
has the same problem at crossroads.
4.4.1 Definition of Reinforcement
A simple calibration of the laser is needed at the be-
ginning of the execution. The laser measures the dis-
tance of the front beam (number 90) and this distance
is used to calculate the expected distance for the rest
of the beams (values between 50 and 130). If a laser
METHODOLOGY FOR LEARNING VISUAL REACTIVE BEHAVIOURS IN ROBOTICS THROUGH
REINFORCEMENT AND IMAGE-BASED STATES
153
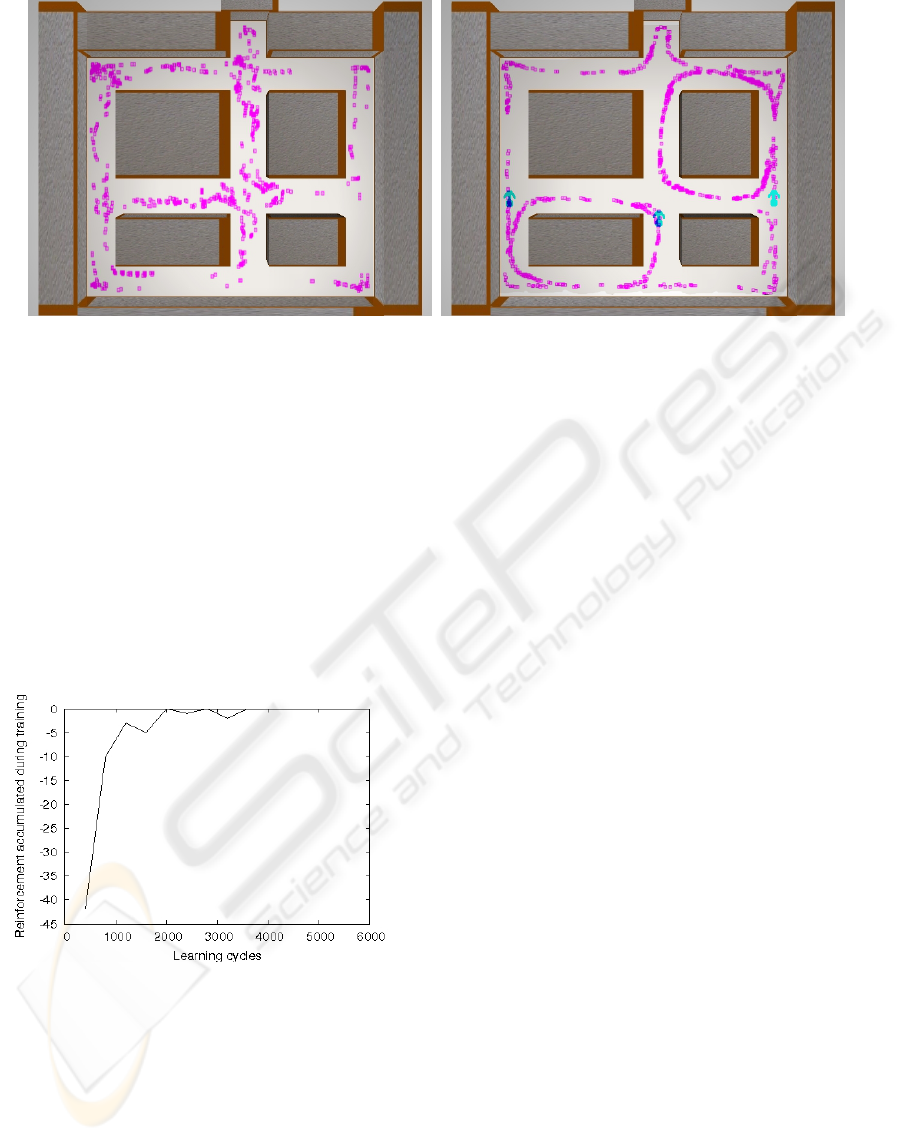
(a) (b)
Figure 6: Corridor following behaviour: a) Trajectories obtained during initial stages; and b) Trajectories obtained during
final stages.
beam value is greater than the expected distance plus
15 cm, then the reward is -1.
4.4.2 Results
The environment used is shown in Fig. 8(a).
Fig. 7 shows the reinforcement received during the
learning phase in TTD(λ). As can be seen in the dia-
grams, the agent learns the task in 2,000 learning cy-
cles.
Figure 7: Reinforcement accumulated during the learning
of platform following behaviour.
4.5 Object Following Behaviour
The main change for this behaviour was the filtering
of the image. Here, instead of using a Sobel filter the
image is preprocessed with a simple colour filter. Red
was chosen and a red box is attached to the prey, an-
other Pioneer 2-AT executing a follow line behaviour.
The prey has a follow line behaviour, the path of the
pray is shown in Fig. 10(a).
4.5.1 Definition of Reinforcement
The defined reward is negative (-1.0) when any of the
following conditions is accomplished:
1. Close reinforcement: if any of the laser beams de-
tects an obstacle at 30 cm or less.
2. Image reinforcement: if the prey is not viewed by
the camera.
4.5.2 Results
Fig. 9 shows the reinforcement received during the
learning phase in TTD(λ). As can be seen in the di-
agrams, the agent learns the task in 10,500 learning
cycles. The learning is slower for this behaviour due
to the fact that the path of the prey is very long, an en-
tire lap taking approximately 7 minutes, so a number
of difficult situations appeared very sporadically.
As can be seen in Fig. 10(b) the path of the final
behaviour is smoother than the path of the prey. The
average distance between the robot and a prey moving
at constant speed of 0.2 m/s is 0.9 m. We have tested
several speeds for the prey: if the speed is slower than
0.35 m/s the robot can follow it (it should be remem-
bered that the maximum speed of the robot is 0.4 m/s,
see table 2).
4.6 Test in a Real Robot
Finally we have tested the behaviour with minor
changes on a real environment: a long corridor, nar-
rower than learning environment, with many new fea-
tures, such as trash baskets, radiators, plants, glass
walls, open and closed doors. This real environment
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
154
(a) (b)
Figure 8: Platform following behaviour: a) Trajectories obtained during initial stages; and b) Trajectories obtained during
final stages.
(a) (b)
Figure 10: Object following behaviour: a) Trajectories obtained during initial stages; and b) Trajectories obtained during final
stages.
Figure 9: Reinforcement accumulated during the learning
of object following behaviour.
also has both natural and artificial lighting. As can
be seen by examining the robot’s path on Fig. 11, our
behaviour works perfectly.
5 CONCLUSIONS AND FUTURE
WORK
In this work four visual reactive behaviours for the
Pioneer 2 AT robot have been implemented with
RL algorithms. All behaviours use the same state
and action spaces, only reinforcement changes. A
rangefinder laser is used to define the reinforcement
of each behaviour. Learning and testing were carried
METHODOLOGY FOR LEARNING VISUAL REACTIVE BEHAVIOURS IN ROBOTICS THROUGH
REINFORCEMENT AND IMAGE-BASED STATES
155

Figure 11: Robot’s path carrying out the visual wall fol-
lowing behaviour on a real environment (right wall). The
map is a certainty grid created with a LMS200 laser (white
pixels are free space, black obstacles and grey uncertainty).
out on the 3-D Gazebo simulator. A wall following
test in a real environment is also shown.
Using a fisheye camera the environment is per-
ceived in 3D, and it is possible to avoid obstacles that
are invisible to other sensors which are more common
in mobile robotics (laser or ultrasounds).
In the proposed methodology the states are de-
fined directly from the image after a simple prepro-
cessing (Sobel or colour filtering) with no calibration
process. With a 3x3 grid, we can define a state space
of only 64 states. It has a certain degree of “percep-
tual aliasing”, but RL algorithm converges. We have
also tested grids of different dimensions with similar
results but greater convergence time. A delicate bal-
ance need be struck between reducing the number of
states and avoiding “perceptual aliasing”.
The proposed codification and methodology is
general, not specific for the task, and has proved to
be efficient and valid, and easy to adapt to distint be-
haviours. The system works with different types of
reinforcement and filtering.
Various tests were carried out to verify the robust-
ness of the learned behaviours. We used obstacles that
were not detected by the laser device, and walls with
gaps. In both cases the system generalized perfectly
and the results were optimal. If the gaps in the walls
were large (over 40 cm) a large number of new states
appeared with respect to the training process, and the
final result deteriorated.
Future lines of work include on-line real robot
learning, the integration of several behaviours (e.g.
follow objects and avoid obstacles) and establishing
a mechanism for automatically defining the states of
RL (e.g. neural networks).
ACKNOWLEDGEMENTS
This paper was supported in part by the Xunta
de Galicia and Spanish Government under Grants
PGIDIT04-TIC206011PR, TIN2005-03844, and de-
partment colaboration grant (B.O.E. 16-06-2006).
REFERENCES
Boada, M., Barber, R., and Salichs, M. (2002). Visual ap-
proach skill for a mobile robot using learning and fu-
sion of simple skills. Robotics and Autonomous Sys-
tems, 38:157–170.
Gaskett, C., Fletcher, L., and Zelinsky, A. (2000). Rein-
forcement learning for a vision based mobile robot. In
Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and
Systems (IROS), volume 1, pages 403–409.
Mart
´
ınez-Mar
´
ın, T. and Duckett, T. (2005). Fast reinforce-
ment learning for vision-guided mobile robots. In
IEEE Int. Conf. on Robotics and Automation (ICRA),
pages 4170–4175.
Michels, J., Saxena, A., and Ng, A. (2005). High speed
obstacle avoidance using monocular vision and rein-
forcement learning. In Proc. Int. Conf. on Machine
Learning.
Mill
´
an, J. R., Posenato, D., and Dedieu, E. (2002).
Continuous-action Q-Learning. Machine Learning,
49:247, 265.
Moreno, D., Regueiro, C., Iglesias, R., and Barro, S.
(2004). Using prior knowledge to improve reinforce-
ment learning in mobile robotics. In Towards Au-
tonomous Robotic Systems (TAROS).
Nakamura, T. and Asada, M. (1995). Motion sketch: Ac-
quisition of visual motion guided behaviors. In IJCAI,
pages 126–132.
Nehmzow, U. (1999). Vision processing for robot learning.
Industrial Robot, 26(2):121–130.
Regueiro, C., Domenech, J., Iglesias, R., and Correa, J.
(2006). Acquiring contour following behaviour in
robotics through q-learning and image-based states. In
Proc. XV Int. Conf. on Computer and Information Sci-
ences Engineering (CISE), pages 403–409.
Regueiro, C., Rodr
´
ıguez, M., Correa, J., Moreno, D., Igle-
sias, R., and Barro, S. (2002). A control architecture
for mobile robotics based on specialists. In Leondes,
C., editor, Intelligent Systems: Technology and Appli-
cations, volume 6, pages 337–360. CRC Press.
Ruiz, J., Montero, P., Mart
´
ın, F., and Matell
´
an, V. (2005).
Vision based behaviors for a legged robot. In Proc.
Workshop en Agentes F
´
ısicos (WAF), pages 59–66.
Wyatt, J. (1995). Issues in putting reinforcement learning
onto robots. In 10th Biennal Conference of the AISB,
Sheffield, UK.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
156
