
LOCATION MANAGEMENT IN DISTRIBUTED,
SERVICE-ORIENTED COMMAND AND CONTROL SYSTEMS
Thomas Nitsche
Research Institute for Communication, Information Processing and Ergonomics (FGAN-FKIE)
Keywords: Location management, non-homogenous distrib
ution, neighbourhood, areas of interest, network centric
operations, command and control.
Abstract: In this paper we propose an efficient location management scheme for large amounts of mobile users and
other objects in distributed, service-oriented systems. To efficiently observe geographic areas of interest
(AOI) in command and control information systems (C2IS), i.e. to compute the AOI within a C2IS, we
introduce the concept of region services. These services contain all objects of a fixed geographic region. To
handle in-homogenous distributions of objects we propose a combination of regular and hierarchical
regions. A user-specific C2IS instance can now directly and efficiently establish subscription-relations to
the relevant objects around its AOI in order to obtain information about the position, status and behaviour of
these objects. If objects including the current user itself now dynamically change their position we merely
have to update the information relations to those few objects that enter or leave a region within the AOI,
instead of having to consider all objects within the global information grid. Region services thus do not only
improve the efficiency for generating a static common operational picture but can also handle any dynamic
changes of object positions.
1 INTRODUCTION
Location management, i.e. the determination and
tracking of object positions, plays an important role
in all systems where such location information is
used. In ubiquitous systems it delivers valuable
information about the geographic context of a user
and his surrounding.
In this paper we handle the question how such
location-awa
reness can be realized in large
distributed systems. Objects in such systems are
mobile users, sensors as well as spatial objects
representing specific geographic locations like
bridges or street corners. These (mobile) objects can
be represented as service instances or agents. To
adapt themselves to the current situation they must
be able to observe the relevant context, i.e. the other
objects in their direct neighbourhood, but also
potentially far more remote objects that might have
an effect on them.
In network-centric operations (NCO) (Alberts &
Hay
es, 2003; Kruse, Adkins & Holloman, 2005;
Wilson, 2004) as well as in crises management for
disaster scenarios (Arnold, et al., 2004; Denning,
2006a; Jungert, Hallberg & Hundstad, 2006)
command and control information systems (C2IS)
(Alberts & Hayes, 2006) are used for managing the
operations. In both cases the user has to make proper
decisions and react quickly, i.e. in real-time,
according to the current situation.
Since the number of objects and users is too
large
to be directly observable – it may reach
millions in network-centric operations – the C2IS
has to provide mechanisms to filter the available
information to the mission-specific parts that are
relevant to the corresponding users.
Areas of interest (AOI) are geographic areas like
t
he surrounding of a user’s position and his area of
responsibility where the user wants to get informed
about other objects and users that either are within
that specific area or that may have an effect on that
area. The objects themselves are in general
distributed in-homogenously over the overall
operational area (cf., e.g., (Mitschke & Peter, 2001)
for distribution of users within a disaster scenario)
and the objects are not static but may change their
positions with different speed: While pedestrians are
moving slowly, vehicles or even helicopters or air-
planes may change their position at very high speed.
Since each of the objects may correspond to a user
of the C2IS, we therefore have to manage the
location of potentially millions of mobile users in
parallel. Since the applications require a reaction in
144
Nitsche T. (2007).
LOCATION MANAGEMENT IN DISTRIBUTED, SERVICE-ORIENTED COMMAND AND CONTROL SYSTEMS.
In Proceedings of the Second International Conference on Software and Data Technologies - PL/DPS/KE/WsMUSE, pages 144-151
DOI: 10.5220/0001347001440151
Copyright
c
SciTePress

real-time, the corresponding location management
and AOI computation has to be done in an efficient
manner as well.
The remainder of this paper is organized as
follows. In Section 2 we describe the global
information grid and how geographically based
areas of interest can be defined in command and
control information systems. The location
management in C2IS is discussed in Section 3. An
efficient algorithm based on the concept of region
services working for non-homogenous distributions
is described in Section 4. Finally, Section 5
concludes.
2 AREAS OF INTERST
IN COMMAND
AND CONTROL SYSTEMS
2.1 The Global Information Grid
The global information grid (GIG) (Blais, Goerger,
Richmond, Gates & Willis, 2005; U.S. Government
Accountability Office, 2004) forms the technical
basis for realizing the power of the network-centric
operations concept. As is the computational or data
grid formed as a connection of compute or data
centres with the users (Foster & Kesselmann, 1998),
so is the information grid: It is based on the global
connection of all users and systems, ranging from
sensors over the command and control systems to
actors. In principle, every system or user may be
able to communicate with everybody else in the
network and can have access to remote services and
data. In the information grid, all available
information can thus be shared among the different
users, provided that the required security criteria are
satisfied.
Sharing all available information is, however,
not sufficient. From the information point of view,
using all available data leads to an explosion of the
information space, which cannot be handled
appropriately by humans and computers. To handle
the problem of information overload (Denning,
2006b) we have to restrict the data in an operational
picture to only that information that is relevant for
the corresponding user and his current mission
(Hayes-Roth, 2006; Nitsche, 2006).
A command and control information system
(C2IS) therefore has to provide corresponding
filtering mechanisms. Areas of interest (AOI) are
one such concept.
2.2 Areas of Interest
An area of interest (AOI) is the area of concern to
the user. Here we concentrate on geographically
based areas. The area of interest to a user of a C2IS
will generally include the (geographical) area of
operation of the corresponding user. Moreover, the
AOI will normally also include some surrounding
area to monitor the behaviour of neighbouring users
(be they friendly or hostile), who could influence the
successful completion of the user’s mission.
In a C2IS the AOI of a user is thus defined as an
area like the surrounding of his position or the
surrounding of his area of operation which he wants
to observe. That means that he wants to get informed
about other objects that are within that specific area.
This is feasible since most of the data presented in a
common operational picture (COP) (Mittu &
Segaria, 2000) by a C2IS have some spatial
reference. This includes (physical) positions of
mobile users (Hightower, Borriello, 2001)
representing own and foreign forces, spatial data like
information about streets or bridges, and others.
The shape of an AOI can be seen as a
combination of simple circular or rectangular
surroundings of the current user’s position and other
spatial data (cf., e.g., (Lisper & Holerin, 2002)). To
simplify the presentation we abstract from the exact
shape of the AOI for the remainder of this paper. We
only require that we are able to check if a certain
position is inside a given shape. Moreover, we also
abstract from the exact kind of objects stored in the
C2IS. We only need some attribute values about
their position and status, but do not distinguish
otherwise between them here.
2.3 Incorporating Effect Ranges
The simple form of AOIs defined above can be
extended based on the potential impact of objects on
us on their effect range, but also on their potential
impact in the future based on planned activities
(Schade & Hieb, 2006).
For incorporating the effect range of objects we
can use object properties like their speed, their
direction of movement or the range of the object or
their weapons to determine a distance from within
they can be a potential threat or supporter (cf., eg.,
(McEneaney & Singh, 2007; Scott, Wan, Rico,
Furusho & Cummings, 2007)).
In Figure 1, for instance, we filtered all objects
whose effect range (which is simplified visualized as
a green circle) does not intersect with the AOI. Thus
only those two objects located directly within the
LOCATION MANAGEMENT IN DISTRIBUTED, SERVICE-ORIENTED COMMAND AND CONTROL SYSTEMS
145
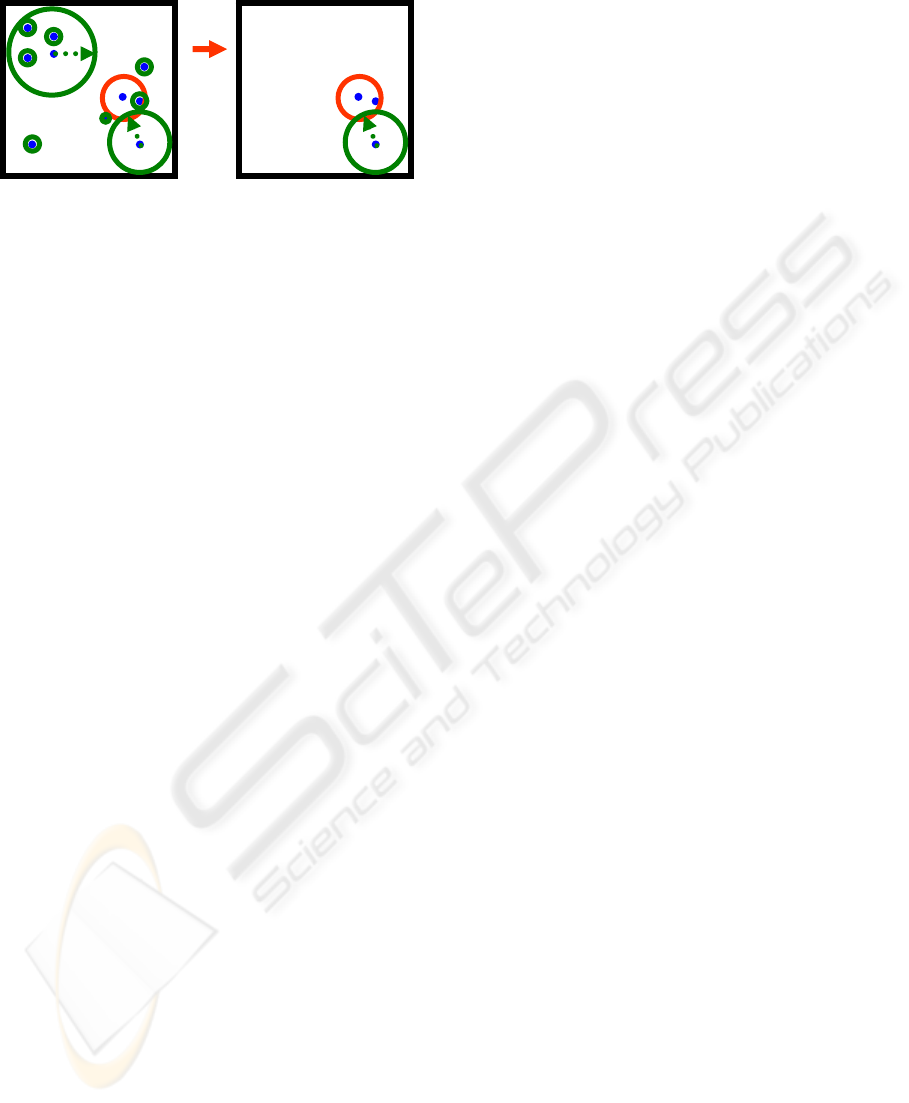
area of interest itself and the object in the lower right
part of the figure remain relevant in this example.
Figure 1: Area of interest (simplified visualized as red
circle) with effect range (simplified visualized as green
circles) of objects (blue dots) taken into account.
3 LOCATION MANAGEMENT
IN C2IS
Such user-parameterised areas of interest as
described before thus define a set of objects that the
user is interested in, i.e. that are relevant for his
operational picture. For its computation we hence
have to determine which objects are contained with
the AOI because they are within a specific proximity
of that user or might have an effect on him.
3.1 Service-Oriented C2IS
In this paper we assume a service-oriented
architecture of the C2IS (Käthner & Spielmann,
2004). The overall functionality is provided in the
form of services with user-specific instances, each of
them can be distributed onto different computers in
the grid which allows the C2IS to operate in a
decentralized manner. The shared data of the global
information space is thus not necessarily contained
in a central database but can also be distributed
within the grid among the different service
instances, where each of them only hold a local
portion of the overall information.
Relevant for the location management is a so-
called COP-service. The user-specific instance of
that service stores the data about the user itself and
its current status like its position. This information
can be delivered to other COP-services using a
publish-subscribe-approach. A user-specific COP-
service can subscribe to those objects relevant for
this user in order to become informed about their
position, status and future changes.
3.2 Simple Approaches and its
Limitations
However, before a COP-service can establish
subscription-relations to the relevant objects, we first
have to determine these relevant objects, i.e. we
have to find out which objects are actually within
our AOI.
In case that we were satisfied with an AOI
containing only objects in our direct neighbourhood
we might get the location information of these
objects just for free. A special routing protocol for
the radio communication in mobile ad-hoc networks
(MANETs) additionally transmits GPS data
(Bachran, Bongartz & Tiderko, 2005). Unfortunately
this is a proprietary protocol, so it only works if all
radio communication devices use this protocol
which we cannot assume to be valid, especially in
multinational operations or disaster scenarios
incorporating different organisations with different
equipment. Moreover, this approach is restricted to
the tactical level and the direct surrounding of
ourselves. Objects that are located far more remote
but are still relevant for our AOI, e.g. because of
their large effect range, cannot be handled here. The
same restriction holds for objects that are connected
directly via fibre cable instead of radio
communication.
Note that an IP-based location management
scheme (cf., e.g., (Shin, Park, Jung & Kim, 2006))
also does not work here: Due to the different
organisations involved that may use their own sub-
networks as well as command and control
hierarchies the geographic neighbourhood is not
necessarily correlated with that in a network, even if
we used tactical radio on the lower tactical levels.
Similar holds for RFID-based tracking systems like
(Satoh, 2006).
Thus in general we have to compute the AOI
explicitly.
Let N be the total number of objects available
within the grid. If no further information is
available, the AOI computation for a single user
requires O(N) time, since we have to check the
position of all N objects.
Unfortunately, we are not the only user in the
system. According to the NCO approach in principle
all users (except for hostile units) can do the same,
i.e. they may have an associated COP-service that
computes its own AOI. This implies that all objects
may define their own local areas of interest for
which they have to check the positions of all other
objects in turn. Implemented naively, this would
lead to an algorithm of quadratic time-complexity
O(N
2
), while synchronized all-to-all algorithms can
do this in O(N log N) time (Barnes & Hut, 1986).
Effect
ICSOFT 2007 - International Conference on Software and Data Technologies
146
This is, however, still not satisfactory. The
reason is that the above complexity only holds for a
single AOI computation with static object positions.
In practice, however, we have a situation where the
objects are mobile, i.e., they change their positions
at any time. This implies that some objects leave our
AOI, while others may enter it. Subscription-
relations to objects within out AOI only provide us
with position updates of those objects that we are
already monitoring. So we can determine if an object
leaves the AOI, but we will not know if another
objects moves towards us. Even worse, we may (and
in general will) move ourselves towards other
objects that are not in our AOI yet and hence are not
monitored by us. As a result, dynamic changes of
object positions will soon make the AOI outdated.
As a consequence we had to re-compute the AOI
in regular intervals in order to update it. The
dynamic behaviour of the objects thus forces us to
execute the above described algorithm over and over
again. Since it is a global algorithm this not only
takes the computation time but – in case of
distributed services – also the time for the all-to-all
communication scheme wasting a lot of bandwidth.
But even if we ignored the above described
computational and communication efficiency
problems of the algorithm and simply re-computed
the AOI in very short time intervals we still would
have the problem that we do not know if and when
the AOI becomes outdated due to un-monitored
objects entering our AOI without notice.
4 REGION SERVICES
The reason why the above approach is so inefficient
is that we repeatedly check the positions of all
available objects within the grid, while there are in
practice only a few objects relevant for our area of
interest, their number being in general much less
than N, i.e., the total number of objects. In the naïve
implementation we therefore filter out objects
according to their position from the full object set
rather than just checking if there exist any objects
with a specific position (in our surrounding) and
combining these small sub-sets directly.
4.1 Concept
Approaches in multi-cast communication schemes
(Carzaniga, Rosenblum & Wolf, 2001; Carzaniga,
Rutherford & Wolf, 2004; Sebé & Domingo-Ferrer,
2007) lead us to the idea of a region service. Such a
service defines a certain geographical region of the
world and contains a list of all objects that are
located within this region.
Based on a C2IS software architecture consisting
of COP-services, we hence can extend this by a set
of region services, each of them being responsible
for a certain region. In its simplest form we can
divide the earth (or at least our full operational area)
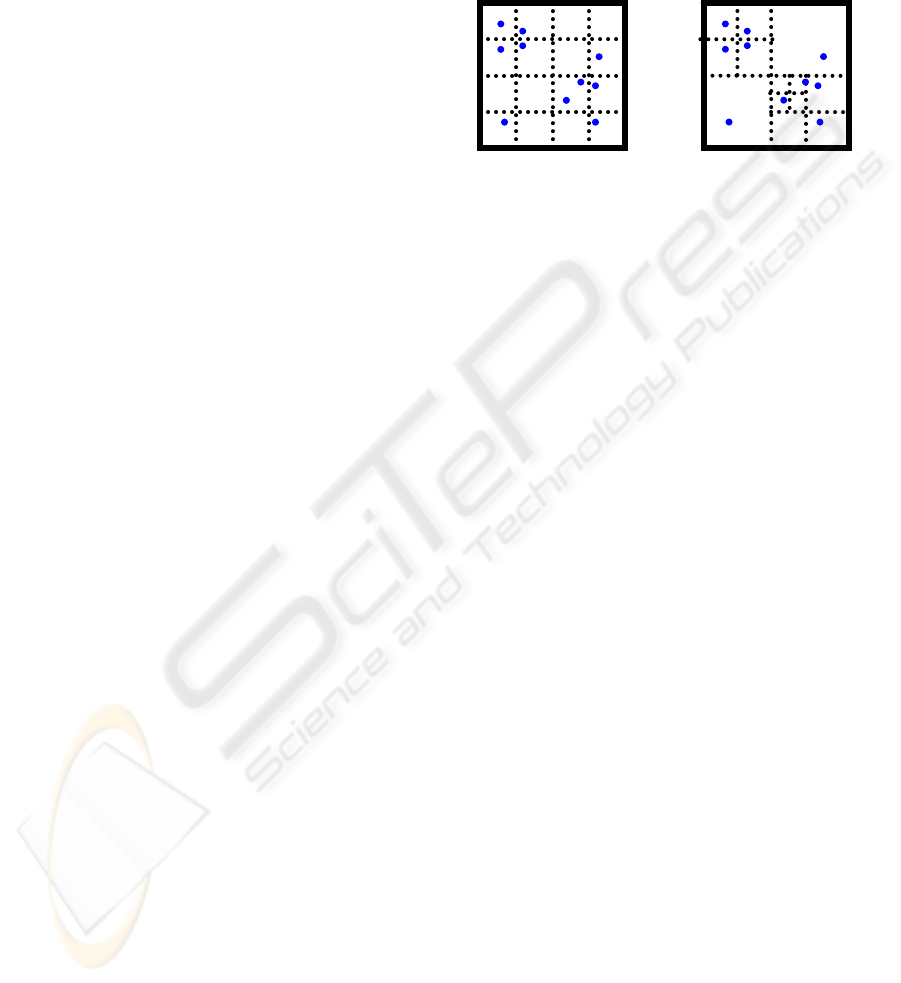
into regions of the same size (cf. Figure 2-(a)).
(a) Regular Regions (b) Hierarchical Regions
Figure 2: Division of an area into (a) regular regions with
the same size each, and (b) hierarchically defined regions
based on a quad-tree division with different sizes but
containing approximately the same number of objects.
In cellular radio networks such regions appear
naturally due to the limited range of radio
communication. A mobile user thus has connections
to only a few cells that determine the user’s location
area. Location management here means paging and
location update (Chew, Yeo & Kuan, 2007).
However, in network-centric operations the users
are connected via different communication channels
which include radio networks, satellite connections
and fibre lines. In the global information grid, where
all objects are connected to, is the geographic
proximity in general not directly visible. Even if two
users are in direct neighbourhood of each other, they
may use different kinds of radio communication
devices due their affiliation to different
organisations or nations and hence do communicate
not directly with each other via radio but via their
corresponding home organisations.
Moreover, the location of a user is actually not a
single position but potentially a larger area of its
effect range. We can thus do not directly use the
concepts used in (cellular) radio networks for
general command and control information systems.
We hence use directly the spatial position
information of an object (like its GPS position).
Figure 2-(a) shows the division of an area into
regular regions, each of them being of the same size.
In such a regular division the borders of each region
can be computed very easily and the test if a certain
position falls within a specific region can be done
very efficiently. (This computation of the affiliated
region to a certain position corresponds to the
paging process in cellular radio networks.)
Each of the spatial objects can thus be added to
one of the region services in constant time. To detect
the objects within the area of interest (AOI) for a
user, we now only have to request the objects from
LOCATION MANAGEMENT IN DISTRIBUTED, SERVICE-ORIENTED COMMAND AND CONTROL SYSTEMS
147

those region services that overlap with the user’s
AOI. This takes O(N/R) time on average for each
region service, with R being their number. If the
number R of regions is sufficiently large we can thus
achieve that each region service is – on average –
responsible for only a restricted number of objects.
Unfortunately, the objects in a military domain
are in general not regularly distributed around the
world but concentrated on the battlefields. This
implies that the number of objects located within
each regular region may vary significantly: While
some regions may be (almost) empty, other regions
may contain a large amount of objects. This not only
affects the efficiency of the algorithm described
before but may even prevent the required real-time
behaviour of the command and control information
system.
A similar problem arises in massively
multiplayer online real-time games. Here a zoning
approach is used to distribute the server load onto
parallel servers, each of them being responsible for a
different partition, i.e. zone, of the game world.
However, while this zoning concept scales with the
number of players and the size of the users, it does
not scale with the density of players within a certain
area. If the object density within one region is too
large, the server does not respond in real-time
anymore. (Müller & Gorlatch, 2006) proposes the
replication of heavily populated zones onto different
game servers on the grid. Here each server contains
the whole game state, but only processes the so-
called active entities as part of the global state and
afterwards broadcasts its local computation result.
While in games such a bad responsiveness is at
most annoying, in real-life like in network-centric
operations the inability to locate the different objects
in time may actually result in real casualties.
The region services in our approach are basically
storing data (the local objects in that region) and are
not computing-services. (The actual computation is
done in the COP-services. Note that the mapping of
service-instances to actual servers is outside of the
scope of this paper.) The replication thus does not
make sense here. However, the idea of parallelizing
the load onto different (sub-)servers can be adopted
if we divide a region (with its object set) into sub-
regions (with its corresponding sub-sets of
associated objects).
An adaptive approach to the definition of regions
therefore has to take the actual distribution of
objects into account. Organizing region areas
hierarchically as a quad- or oct-tree (in case of two-
or three-dimensional coordinates, see Figure 2-(b))
allows region services to be defined in such a way
that they all contain (almost) the same number K of
objects. This leads to a O(K) constant time algorithm
for retrieving the objects within an AOI, provided
the size of the AOI is small compared to the whole
area, i.e. the AOI covers only a fixed number of
regions. However, the check which region a certain
position belongs to requires O(log (N/K)) time in
this case, so dynamic object movements are more
expensive here than for regular regions.
The concept of region services not only improves
the efficiency for generating a static operational
picture but can also handle dynamic changes of
object positions. In general all user objects are
mobile. Thus the objects within and near the AOI of
a user may leave or enter the AOI dynamically.
However, not only the surrounding objects but also
the user itself may move. Therefore a static
computation of the AOI does not work, but we have
to compute and update the AOI dynamically: If an
object is located in the area of one of the regions that
overlaps with our AOI, we can subscribe to that
object for position updates. If that object finally
leaves the area of that region and is thus out of our
AOI, we can cancel the subscription of that object.
If, on the other hand, a currently un-monitored
object changes its position in such a way that it is
entering the area of one of the regions that overlap
with our AOI, we will be informed by the region
service about this object and can immediately
subscribe to it. We therefore only have to check for a
limited amount of objects if they are within our AOI.
Note that a region service should in average
contain not only one but multiple objects, because
this shall give the best trade-off between 1) the time
required to manage the objects within the region
service and their potential dynamic movements from
one region to another region on one hand, and 2) the
time to determine the region service(s), i.e. to check
where a certain object belongs to, on the other hand.
4.2 Location Management using
Region Services
The actual location management algorithm for
computing the areas of interest with the support of
region services is described here. See also Figures 3
and 4 for an illustration.
Effect
Figure 3: Computing the AOI with effect ranges using
region services. The resulting area is shown in Figure 1.
ICSOFT 2007 - International Conference on Software and Data Technologies
148

1
.
Figure 4: Phases of the location management process.
Phases 1-2 (see Figure 4) set the pre-conditions
by initializing the region services. Phases 3-6 fetch
the location information of the objects in the user’s
surrounding of the current user. Finally in phase 7
the AOI is computed locally. Phases 2 and 5 can be
omitted for the location management without effect
ranges.
1 Register objects at corresponding region
services of current position: First all objects
have to register themselves at their
corresponding region service, i.e. they publish
themselves.
In case of regular regions it takes constant
time for each object and can be done in parallel
for each region service, while in case of
hierarchical regions it takes O(log R) time for
each object to find its proper region, and since
adding new objects may change the region
hierarchy this has to be done sequentially.
Once all the objects are registered at their
corresponding region service, their COP-
services take care of their movements: If an
object leaves the area of one region and enters
the area of another region, the service
automatically de-registers the object at the old
region service and registers itself at the new
one. These dynamic updates may happen in
parallel to the AOI computation, provided we
ensure that an object is registered at the new
region service before it de-registers itself in the
old region.
2 Register objects at region services of current
effect range: Then all objects additionally have
to register at the corresponding region service
of all those regions that they have an effect on.
Note that in this case one object may be
registered at multiple region services.
3 Determine relevant region services for the
AOI: To compute the AOI of a user, we have to
determine the relevant region services for this
user. This includes all those regions that
intersect with the shape of the AOI.
2
.
3..
5
.
6
.
4 Get object sets from the relevant regions for
the AOI: Then we read all objects from the
relevant region services determined in phase 3
before. We thus get a list of object identifiers,
or links to their corresponding COP-services.
In order to get informed if that object-set
changes (due to moving objects) we have to
create a subscription-relation to the region-
service.
In addition to the objects located within
certain regions here we also get objects that
might have an effect within that region.
5 Merge object sets: Since effect objects may be
registered at multiple region services, we have
to merge the object sets from different regions.
For example, in Figure 3 the object in the
lower right part of the figure is – due to its
large effect range – registered at two of the
relevant regions (shown in light blue, c.f.
Figure 4-4.).
6 Read object positions and effect range: Read
further information, especially the location, of
these objects. This can be done by creating
subscription-relations to the corresponding
COP-services of these objects, which also
informs us about later changes of their values
and positions.
7 Determine objects within the AOI: Finally we
check which of the objects actually belong to
the AOI and which does not. Those objects
where their position or their effect range
intersects with the shape of the AOI are to be
displayed, while the others are filtered out.
Note that if one of the objects received in
phase 4 changes its position we have to check
again if it has moved into or out of the AOI.
However, since from phase 4 we get only
objects in the direct neighbourhood of the AOI,
there are generally much less objects to be
filtered out than had been in the simple
algorithm of Section 3.
4.3 Dynamic Location Updates
The presented algorithm works well for a static
setting where the objects do not move. Here we
discuss that is also appropriate for the dynamic case.
If the user is moving, the shape of his AOI may
intersect with other regions than before. In this case
we have to update the subscription relations to the
corresponding region services. This will provide us
4
.
LOCATION MANAGEMENT IN DISTRIBUTED, SERVICE-ORIENTED COMMAND AND CONTROL SYSTEMS
149

with the objects within these regions such that we
can update the AOI.
If, on the other hand, another object (that may be
monitored by the user’s AOI) is moving in such a
way that it leaves the area of its current region, it has
to register itself at the new region-service (and de-
register at the old one). This region service will
automatically inform the user about the change
within the object set such that the AOI can be
adapted locally.
Moreover, the object registration at the new
region service will increase the number of objects
handled by it, if not another objects leaves the region
at the same time. In the hierarchical region model
based on quad- or oct-trees this would mean that we
had to split the region into sub-regions, if a certain
maximal number of objects had been reached. (Note
that for efficiency reasons we do not split
immediately but allow more than one object within
each region.) If a region is split, we create new
region-services for the sub-regions, while the old
region-service takes the role of the parent service.
However, one problem still remains with the
hierarchical regions. In order to check which region
service a specific location belongs to, we have to
retrieve the corresponding region service by
traversing the region-tree, starting from the root
region which denotes the whole area. This leads to
O(log R) messages which is not appropriate for
small bandwidth radio networks, and may put high
loads onto the root region server.
For this reason we combine regular and
hierarchical regions: The regular regions as in
Figure 2-(a) serve as base regions, since here the
object location mapping can be done in a single step.
Only if there are too many objects within that region
due to an in-homogenous distribution we further
sub-divide that region in a hierarchical manner. The
region service for the corresponding hierarchical
base region serves as the root for the sub-tree of
regions, which finally leads to a forest of quad- or
oct-trees.
The performance of the different location
management schemes is evaluated in (Nitsche,
2007).
5 CONCLUSION
A command and control information system (C2IS)
has to provide mechanisms to filter the information
available in the C2IS to the mission-specific parts
that are relevant to the corresponding military
commander or other C2IS users. Areas of interest
(AOI) are geographic areas like the surrounding of
the user’s position and his area of responsibility
where the user wants to get informed about other
military objects, e.g., own and foreign forces, that
are either within that specific area or that may have
an effect on that area.
To efficiently observe such areas, i.e. to compute
the AOI within a C2IS, we introduce the concept of
region services. These services contain all objects of
a fixed geographic region. Regions can be defined in
a regular manner or hierarchically based on quad- or
oct-trees.
To handle in-homogenous distributions of
objects we propose a combination of regular and
hierarchical regions: The regular base regions are
used to directly derive the basic region service
responsible for the corresponding area, thus avoiding
the communication overhead necessary if we had to
read the data-dependent region-distribution from a
root region service (and its sub-services). The
concept of hierarchical regions is used in case of
larger densities of objects within a region. In the
latter case we split the region into sub-regions which
are managed by separate services.
A user-specific C2IS instance can now directly
and efficiently establish subscription-relations to the
relevant objects around its AOI in order to obtain
information about the position, status and behaviour
of these objects. If objects including the current user
itself now dynamically change their position we
merely have to update the information relations to
those few objects that enter or leave a region within
the AOI, instead of having to consider all objects
within the global information grid.
Region services thus do not only improve the
efficiency for generating a static common
operational picture but can also manage the dynamic
changes of object locations.
The proposed location management scheme
based on region services can not only be used in
command and control information systems but in all
distributed, service-oriented systems with large
amounts of mobile users.
REFERENCES
Alberts, D.S., Hayes, R.E (2003). Power to the Edge:
Command and Control in the Information Age. CCRP
Publication Series, Washington, DC, USA.
Alberts, D.S., Hayes, R.E (2006). Understanding
Command and Control. CCRP Publication Series.
Anthony, R.W. (1999). Relating Large and Small in C2
and Operations. In Command and Control Research
and Technology Symposium (CCRTS), Newport, RI.
Arnold, J., Levine, B., Mammatha, R., Lee, F., Shenoy, P.,
et al. (2004). Information-Sharing in Out-of-Hospital
ICSOFT 2007 - International Conference on Software and Data Technologies
150

Disaster Response: The Future Role of Information
Technology. Prehospital and Desaster Medicine,
19(2): 201-207.
Bachran, T., Bongartz, H. H.-J. & Tiderko, A. (2005). A
Framework for Multicast and Quality based
Forwarding in MANETs. In Proc. 3rd IASTED
International Conference on Communications and
Computer Networks (CCN’05), ACTA Press.
Blais, L., Goerger, N.C., Richmond, P., Gates, B. &
Willis, J.B. (2005). Global Information Grid Services
and Generation of the Mobility Common Operational
Picture. In 2005 Fall Simulation Interoperability
Workshop (SIW), Orlando, Florida.
Barnes, J.E., Hut, P. (1986). A hierarchical O(N log N)
force calculation algorithm. Nature, 324(4), 446-449.
Carzaniga, A., Rosenblum, D.S., & Wolf, A.L. (2001).
Design and Evaluation of a Wide-Area Event
Notification Service. ACM Transactions on Computer
Systems, 19(3): 332-383.
Carzaniga, A., Rutherford, M.J. & Wolf, A.L. (2004). A
Routing Scheme for Content-Based Networking. In
Proc. IEEE INFOCOM 2004, Hong Kong, China.
Chew, Y.H., Yeo, B.S., Kuan, D.C.M. (2007). Sensitivity
study of location management area partitioning in
cellular communication systems. Computer Networks,
51(6): 1555-1573.
Denning, P.J. (2006a). Hastily formed networks.
Communications of the ACM, 49(4), 15-20.
Denning, P.J. (2006b). Infoglut. CACM, 49(7): 15-19.
Foster, I., Kesselmann, C., editors (1998). The Grid:
Blueprint for a New Computing Infrastructure.
Morgan Kaufmann.
Hayes-Roth, F. (2006). Two Theories of Process Design
for Information Superiority: Smart Pull vs. Smart
Push. In Command and Control Research and
Technology Symposium (CCRTS), San Diego, CA.
Hightower, J., Borriello, G. (2001). Location Systems for
Ubiquitous Computing. IEEE Computer, 57-66.
Jungert, E., Hallberg, N., Hundstad, A. (2006). A Service-
Based Command and Control Systems Architecture
for Crises Management. International Journal of
Emergency Management, 3 (2-3): 131-148.
Kruse, J., Adkins, M. & Holloman, K.A. (2005). Network
Centric Warfare in the U.S. Navy’s Fifth Fleet. In
Proc. 38rd Hawaii International Conference on
Systems Sciences (HICSS), IEEE Computer Society.
Käthner, S., Spielmann, M. (2004). A Base Component for
Network-Based Service-Oriented C4ISR Systems. In
Coalition C4ISR Architectures and Information
Exchange Capabilities, The Hague, The Netherlands.
Lisper, B., Holerin, J. (2002). Development and
Verification of Parallel Algorithms in the Data Field
Model, In Constructive Methods for Parallel
Programming, 127-141, Nova Science Publishers.
McEneaney, W.M., Singh, R. (2007). A Computationally-
Feasible Algorithm for Estimation of Opponent
Strength in Urban Combat. In 12th International
Command and Control Research and Technology
Symposium (ICCRTS), Newport, RI, USA.
Mitschke, T., Peter, H. (2001). Handbuch für Schnell-
Einsatz-Gruppen, 3rd ed. S+K Verlag, (in German).
Mittu, R., Segaria, F. (2000). Common Operational
Picture (COP) and Common Tactical Picture (CTP)
via a Consistent Networked Information Stream
(CNIS). In Command and Control Information
Systems, Monterey, CA.
Müller, J., Gorlatch, S. (2006). Scaling Online Games on
the Grid. In Proc. 4
th
International Game design and
Technology Workshop and Conference (GDTW 2006).
Nitsche, T. (2006). Information Access in Tactical
Command and Control Information Systems. In 11th
International Command and Control Research and
Technology Symposium (ICCRTS), Cambridge, UK.
Nitsche, T. (2007). Evaluating Region-Based Location
Management Schemes for Service-Oriented Command
and Control Information Systems. Subm. to Mil. Com-
munication and Information Systems Conference
(MCC 2007).
Satoh, I. (2006). Location-based services in ubiquitous
computing environments. International Journal on
Digital Libraries, 6(3), 280-291, Springer.
Schade, U., Hieb, M.R. (2006). Development of Formal
Grammars to Support Coalition Command and
Control: A Battle Management Language for Orders,
Requests and Reports. In 11th International Command
and Control Research and Technology Symposium
(ICCRTS), Cambridge, UK.
Scott, S.D., Wan, J., Rico, A., Furusho, C., Cummings,
M.L. (2007). Aiding Team Support in Command and
Control Operations with Large-Screen Displays. In
Proc. of HSIS 2007: ASNE Human Systems
Integration Symposium, Annapolis, MD, USA.
Sebé, F., Domingo-Ferrer, J. (2007). Scalability and
security in biased many-to-one communication.
Computer Networks, 51(1): 1-13.
Shin, S.Y., Park, S.-H., Jung, B.H., Kim, C. (2006).
Dynamic Location Management Scheme Using Agent
in a Ubiquitous IP-Based Network. In Management of
Convergence Networks and Services, 9th Asia-Pacific
Network Operations and Management Symposium
(APNOMS 2006), LNCS 4238, 491-500, Springer.
U.S. Government Accountability Office (2004). Defense
Acquisition - The Global Information Grid and
Challenges Facing Its Implementation. Report GAO-
04-858.
Wilson, C. (2004). Network Centric Warfare: Background
and Oversight Issues for Congress. CRS Report for
Congress RL32411.
LOCATION MANAGEMENT IN DISTRIBUTED, SERVICE-ORIENTED COMMAND AND CONTROL SYSTEMS
151
