
A STATISTICAL NEURAL NETWORK FRAMEWORK
FOR RISK MANAGEMENT PROCESS
From the Proposal to its Preliminary Validation for Efficiency
Salvatore Alessandro Sarcià, Giovanni Cantone
Dip. di Informatica, Sistemi e Produzione, Università di Roma Tor Vergata, via del Politecnico 1, 00133 Roma, Italy
Victor R. Basili
Dept. of Computer Science, University of Maryland, A.V. Williams Bldg. 115, College Park 20742, MD, USA
Keywords: Risk Management Process, Artificial Neural Networks, Experimental Software Engineering, Prior
Probability, Posterior Probability, Bayes’ Theorem, Computational Software Engineering.
Abstract: This paper enhances the currently available formal risk management models and related frameworks by
providing an independent mechanism for checking out their results. It provides a way to compare the
historical data on the risks identified by similar projects to the risk found by each framework Based on
direct queries to stakeholders, existing approaches provide a mechanism for estimating the probability
of achieving software project objectives before the project starts (Prior probability). However, they do not
estimate the probability that objectives have actually been achieved, when risk events have occurred during
project development. This involves calculating the posterior probability that a project missed its objectives,
or, on the contrary, the probability that the project has succeeded. This paper provides existing frameworks
with a way to calculate both prior and posterior probability. The overall risk evaluation, calculated by those
two probabilities, could be compared to the evaluations that each framework has found within its own
process. Therefore, the comparison is performed between what those frameworks assumed and what the
historical data suggested both before and during the project. This is a control mechanism because, if those
comparisons do not agree, further investigations could be carried out. A case study is presented that
provides an efficient way to deal with those issues by using Artificial Neural Networks (ANN) as a
statistical tool (e.g., regression and probability estimator). That is, we show that ANN can automatically
derive from historical data both prior and posterior probability estimates. This paper shows the verification
by simulation of the proposed approach.
1 INTRODUCTION
Since the late 1980’s, when Risk Management (RM)
was first applied to the software domain (Boehm,
1989), (Charette, 1989) (Boehm, 1991), there have
been limited real advances in formal RM
methodologies (Roy, 2004).
One weakness of the existing RM practices
(Sarcià, Cantone, 2006) is the inability to check the
identified risks against past performance on similar
projects. This paper tries to improve on the current
RM practices by integrating into the frameworks an
independent mechanism for comparing the current
risks to historical data. In particular, we propose an
Artificial Neural Network-based (ANN) approach
for estimating both prior and posterior probability
using the historical data of the software
organization. Briefly, the main questions that this
paper answers are: “What is the probability that the
project succeeds? How can we evaluate whether
risks actually have impacted on the achievement of
the project objectives?” The remainder of this paper
deals with the following topics: Section 2 provides
an overview of the key elements of an RM process
focusing on the reliable prediction of project success
and failure. Section 3 defines the problem and
discusses about RM strategies and methodologies.
Section 4 presents and discusses results from a
simulation-based case study for efficiency
validation. Section 5 shows some insights for
168
Alessandro Sarcià S., Cantone G. and R. Basili V. (2007).
A STATISTICAL NEURAL NETWORK FRAMEWORK FOR RISK MANAGEMENT PROCESS - From the Proposal to its Preliminary Validation for
Efficiency.
In Proceedings of the Second International Conference on Software and Data Technologies - SE, pages 168-177
DOI: 10.5220/0001335701680177
Copyright
c
SciTePress
improving the proposed approach. Some final
remarks and forewords for future work conclude the
paper.
2 RISK MANAGEMENT
Risk is a measure of probability and severity of
unwanted effects (Boehm, 1991) on software
development projects.
Basically, all current risk
estimation frameworks in software development
process (Boehm, 1991), (Charette, 1989), (Higuera,
1996), (Kontio, 1996), (Karolak,
1997), (Madachy,
1997), (SEI, 2002), (Roy, 2004), and (Albert, 2006)
evaluate the risk value (or risk exposure), V as:
V(UE) = I(UE) * P(UE) (1)
where UE stands for an unwanted event (risk factor);
P(UE) is the probability that UE occurs; I(UE)
stands for the impact (or cost) due to the occurrence
of UE. As an example, we can consider the
following situation:
UE = {‘Resignation of a senior analyst’}, I(UE) = {6
month’s delay} and P(UE) = 0.25 then:
V(UE) = 6 * 0.25 = 1.5 (months) (1.a)
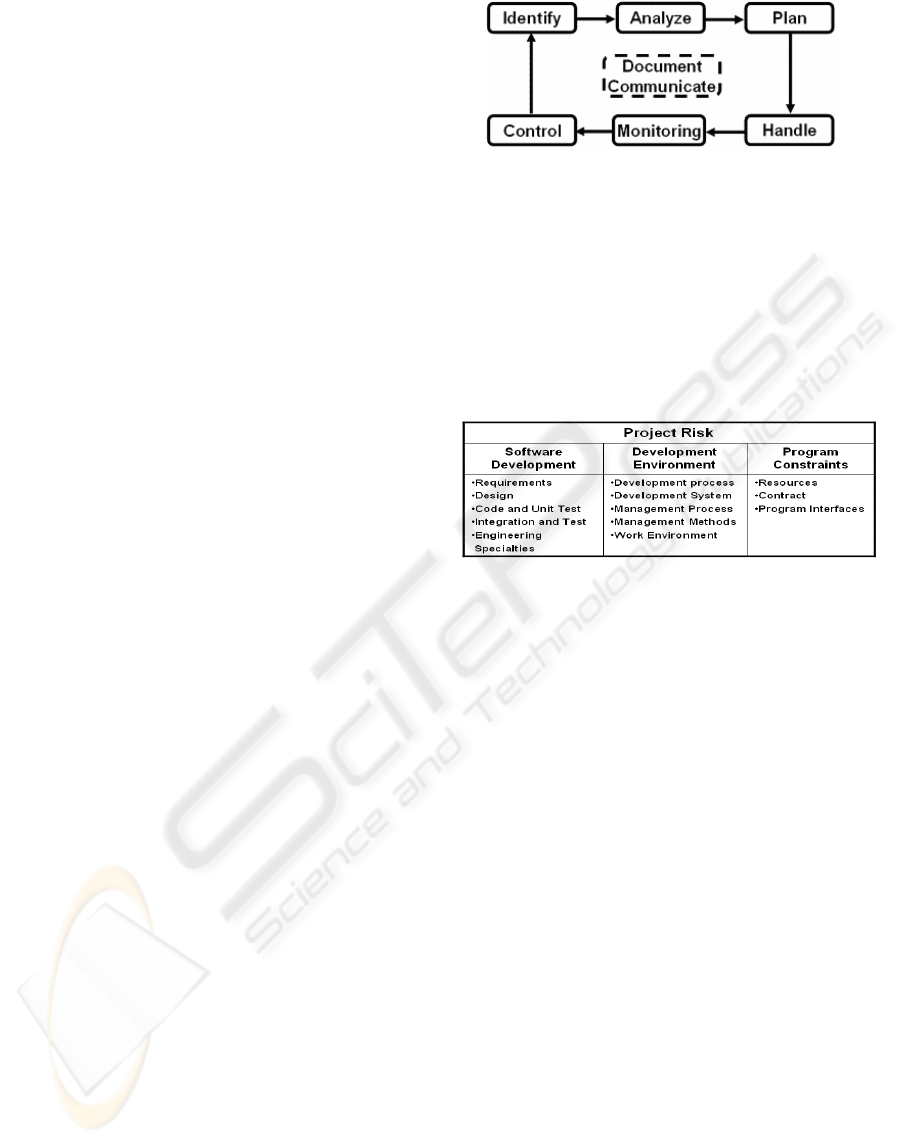
2.1 Risk Management Process
RM is a continuous process, which aims at applying
suitable tools, procedures, and methodologies to
avoid that risk occurs or keep it within stated limits
(SEI, 2002). Some studies describe several basic
steps of RM in slightly different ways, but
substantially they report a process, which – similarly
to the one that Figure 1 depicts – is based on the
stages below.
Identify: Includes the identification of the
internal and external sources of risk through a
suitable taxonomy (Higuera, 1996) (SEI, 2002), as
depicted in Table 1. Risk Identification involves
stakeholders and depends on the project context.
Analyze: Aims at understanding when, where,
and why risk might occur, through direct queries to
stakeholders about the probability and impact of risk
elements. The prior probability is evaluated. This is
the probability that an event (e.g., project delay)
could happen before the project starts. This is
calculated through prior information.
Plan: In order to establish a strategy to avoid or
mitigate the risk, decisions have to be made. In this
stage, contingency plans are stated as well as the
related triggering thresholds. Risk-controlling
actions are defined and selected.
Figure1: Risk Management Process.
Handle: The planned actions are carried out if
the risk occurs.
Monitoring: This is a continuous activity that
watches the status of the project, and checks
performance indicators (e.g., quality indicators, for
instance the number of defects per size unit). In this
stage, data concerning the risk trend is gathered.
Table 1: Risk sources taxonomy (based on SEI, 2002).
Control: It appraises the corrections to be taken
on risk mitigation plan in case of deviations. If the
indicators show an increase over the fixed threshold,
a contingency plan is triggered. In our opinion, this
stage should deal with the posterior probability
because events have already occurred; that is, one
tries to figure out whether an unwanted event
actually had an impact on project objectives. For
further information about prior and posterior
probability (Bayes’ Theorem), please see Section 1.8
in (Bishop, 1995).
Document and Communicate: This stage can
be truly considered as the core of RM; in fact, all
other stages refer to Documentation and
Communication for enabling information exchange.
2.2 Project Success and Failure
Project success and failure constitute the
environment where risk considerations take place.
According to the Standish Group (Standish Group,
1994), budget, schedule, and technical quality are
the primary concepts to evaluate as to whether or not
a project meets its objectives.
It was argued (Jones, 2002) that the measure of
success varies depending on how we define it. It has
been suggested that success should be based on the
developer’s point of view (Procaccino, Verner,
Lorenzet, 2006), and on the stakeholder’s
A STATISTICAL NEURAL NETWORK FRAMEWORK FOR RISK MANAGEMENT PROCESS - From the Proposal to
its Preliminary Validation for Efficiency
169

perspective (Linberg, 1999). Recently, empirical
studies (Berntsson-Svensson, Aurum, 2006) have
found that the nature of projects might not be
systematically correlated with success and failure
factors. (Boehm, 1991) includes in his top ten risk
items unrealistic schedules and budgets, but, it was
pointed out that having a schedule is not necessarily
correlated with project success (Verner, Cerpa,
2005): there are successful projects developed in a
shorter time than scheduled. Additionally, it has
been suggested that project success factors are
intertwined with product success factors (Wallin et
al., 2002).
This paper adopts a definition of project success
and failure very close to the Standish-Group’s
definition (Standish Group, 1994), which states that
a project achieves its objectives when it is on time,
on budget, with all features and functions as
originally specified. Concerning this point, let us
recall that the triad cost-schedule-performance of
project management is often termed the “Iron
Triangle” (Williams, Pandelios, Behrens, 1999).
This triadic view will be used in the rest of the
paper.
Our understanding of risk uses a threshold
concept (Linberg, 1999). In order to check whether
or not a project is meeting the stated objectives, we
consider thresholds on budget, schedule, and
required performances. In this way, project success
and failure vary according to how we set these
thresholds. This interpretation allows us to define a
project to be successful projects just on the basis of a
specific aspect (e.g. a project can be considered
successful for budget factor but fail for the required
defect rate). Actually, we are going to show, below,
that this concept can be represented by a function of
many variables, which, somehow, impact on the
metric that we picked out to represent the success.
3 PROBLEM DEFINITION
To define the problem that this paper deals with, let
us consider again equations (1), (1.a) and Figure 1.
In particular, through the Analysis phase (Figure 1),
we can calculate the risk exposure for each risk
element, which we found in the previous phase
(Identify). As we have already mentioned (Section
2.1), this kind of evaluation is based on asking direct
queries to stakeholders, which should provide a
subjective score for each identified risk. This
procedure might not be reliable because
stakeholders’ subjective scores could change over
time based upon their feeling (Tversky, Kahneman,
1974). In other words, we need a control
mechanism. A possible improvement could be using
historical data, if available. The aim would be
building a control mechanism to increase our
confidence on those subjective scores.
When evaluating the overall risk for achieving a
project objective (Iron Triangle), we pick all the risk
exposures and estimates for each project objective
(that is, each element of the Iron Triangle),
calculating the average risk exposure (Roy, 2004).
Generally, this average is weighted according to
information that RM managers can get by historical
data of the organization (Roy, 2004), (Fussel and
Field, 2005). Based on these weighted averages, one
should state strategies and plans to avoid or shrink
the risk occurrence. Actually, over the Control phase
(Figure 1), we are faced with the problem to figure
out whether and to what extent risks have impacted
on project objectives (e.g., scheduling slippage
evaluation). For instance, if risks impacted very
much upon the project, we should get low
probability to be successful. Note that, this
evaluation depends on what we pick out as a basis
for comparison. For instance, let us assume that the
historical data from the considered organization
shows that, usually in similar projects, the
organization got values for the Schedule
Performance Index (SPI) between 0.8 and 0.9− (SPI
is an index that provides information about the
objective to stay on time). Based on the definition of
this index (ratio between what we have done and
what we planned to do), only values greater than 1.0
should be considered as success. Let us assume that,
current project got SPI
Curr
= 0.95. If we picked out
the theoretical value (SPI
theor
= 1.0) as a threshold
for comparison, we would get a failure (because
SPI
Curr
< SPI
theor
). On the contrary, if we picked out,
for instance, the mean value on past projects (e.g.,
SPI
mean
= 0.85), we would get a success. Therefore,
if we calibrate the evaluation criterion on the
observed data then the decisions that we make are
based on information that is as large and updated as
we can. This happens because the object for
comparison is based upon real performances of the
organization. Actually, the problem is more
complex. As a matter of fact, this calibration should
take in account all possible factors (e.g., domain,
complexity, developers’ experience etc…) that
impacts on the considered performance (e.g., SPI).
In other words, we should consider a regression
function (e.g., SPI as a dependent variable and
impacting factors as independent variables). Often,
for the sake of simplicity, those factors are left out;
hence, organizations prefer adopting just theoretical
ICSOFT 2007 - International Conference on Software and Data Technologies
170
values. This research proposes a way to tackle with
these issues.
3.1 The Strategy
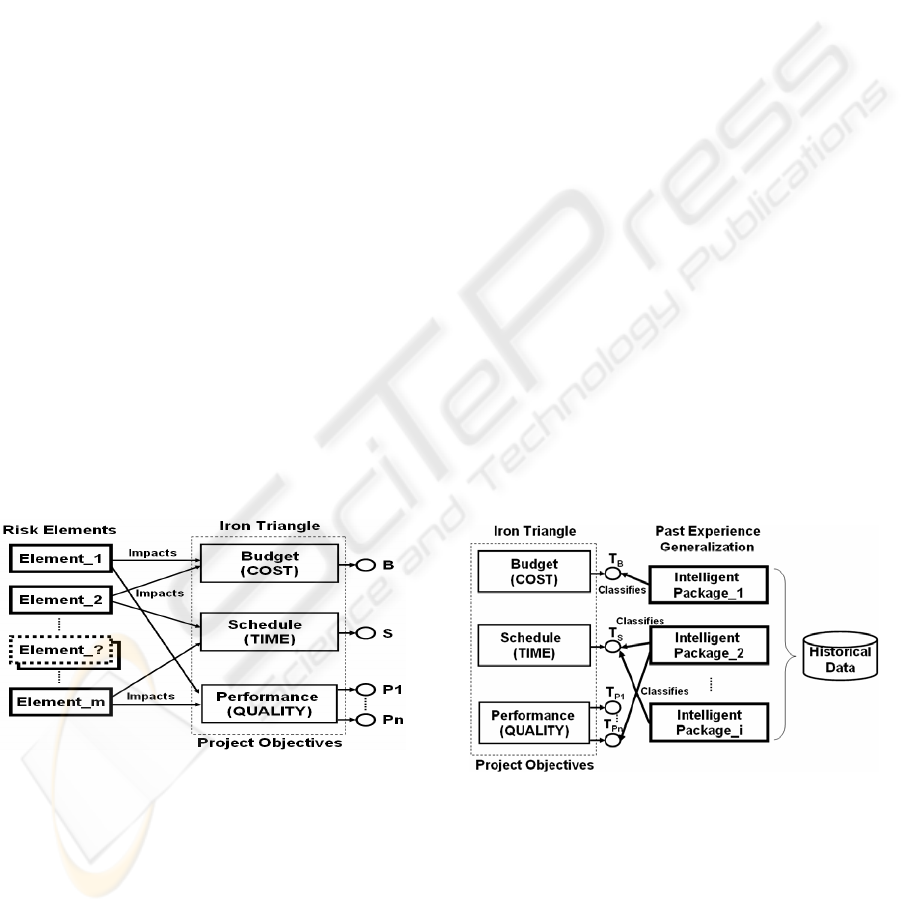
Figure 2 depicts our point of view. Each risk
element might impact (or might not) on one or more
project objectives. We can get the impact of the
assumed risk elements by checking suitable metrics
(Basili, Caldiera, Cantone, 1992), (Basili, Caldiera,
Rombach, 1994), (Basili, Caldiera, Rombach,
1994b), (Cantone, Donzelli, 2000), and (Piattini,
Genero, Jiménz, 2001) on the Iron Triangle during
the project, as depicted on the right side of Figure 2
(lollipop notation). Concerning the posterior
probability analysis, based on the proposed approach
(ANN), we propose to calculate the probability that
the current project has succeeded; if this probability
is less than 0.5 then risks occurred and they cannot
be left out. Moreover, the more this probability
approaches 1.0, the more the impact of risk factors
decreases. Therefore, if we get no effects on the Iron
Triangle, we can decide that the leverage of those
considered risks could be left out. Finally, if the
historical data evaluated by ANN and the weighted
scores obtained by existing frameworks agree, then
we can get more confident on our results. If, on the
contrary, they do not (e.g., if the theoretical
performance indicators and the posterior probability
do not point out success or failure at the same time),
then we have to carry out further investigations on
risk elements.
Figure 2: Risk factors that impact on the Iron triangle.
Our strategy proposes to use historical data to
build a baseline to evaluate risk value and to
automatically check whether the project is meeting
the stated objectives or not. This baseline is actually
generated by an ANN, whose output represents the
posterior probability that can be used in the risk
evaluation, as mentioned above.
3.2 The Methodology
In this section we describe the procedure that one
should follow in order to get risk probabilities from
historical data of the organization as claimed above.
(1) Identifying Success Metrics: In Figure 3 we can
see, by a lollipop notation, that for each project
objective (O) a threshold function (T
O
) can be stated,
which provides success and failure measures. Note
that, T
O
, in this framework, is a function of many
factors as mentioned in Section 3 and as explained
below. We could also define metrics on software
quality aspects such as Defect Rate, Effort per
Defect, Number of Changes per Release (T
P1
, T
P2
… T
Pn
). Therefore, with regard to Figure 3, T
B
could
be a threshold function on Cost Performance Index
(CPI) and T
S
a threshold function on Schedule
Performance Index (SPI) or Productivity (ratio
between SLOC and Effort).
(2) Selecting Impacting Factors on the Success
Metric: By impacting factor, we mean a variable
that can affect the measurement of success metric
(e.g., Domain, KSLOC, Complexity, and
Developers’ Expertise). It is possible that we should
take in account a big number of factors to get good
results. But, the more this number grows, the more
regression function is difficult to be estimated, if we
use canonical methods. However, if we use ANN
and Backpropagation for calculating regression
functions, the number of factors does not influence
the procedure.
Figure 3: Using Computational Intelligence technique to
evaluate project successes and failures.
Of course, the effects of this grow impact on the
computation time, which could be very big. Hence,
we are considering ANN as a mean to estimate non-
linear regression functions because we can obtain
reliable estimates as automatically as possible, even
if we have to consider a high number of impacting
factors. Refer to (Bishop, 1995) and (Dreyfus, 2005)
A STATISTICAL NEURAL NETWORK FRAMEWORK FOR RISK MANAGEMENT PROCESS - From the Proposal to
its Preliminary Validation for Efficiency
171
for more information about the use of ANN and
Backpropagation as a mean to estimate non-linear
regression functions.
In order to understand which factors impact the
considered project objective, we can use GQM
approach (Basili, Caldiera, Rombach, 1994). Briefly,
some possible questions are the following:
• What can impact on the achievement of the
project objective? (E.g., effort ÷ team size,
team experience, used development tools).
• What is the software context? (E.g., Domain,
Category)
• What is the development context? (E.g.
knowledge of the software system,
organization maturity, development flexibility,
etc.)
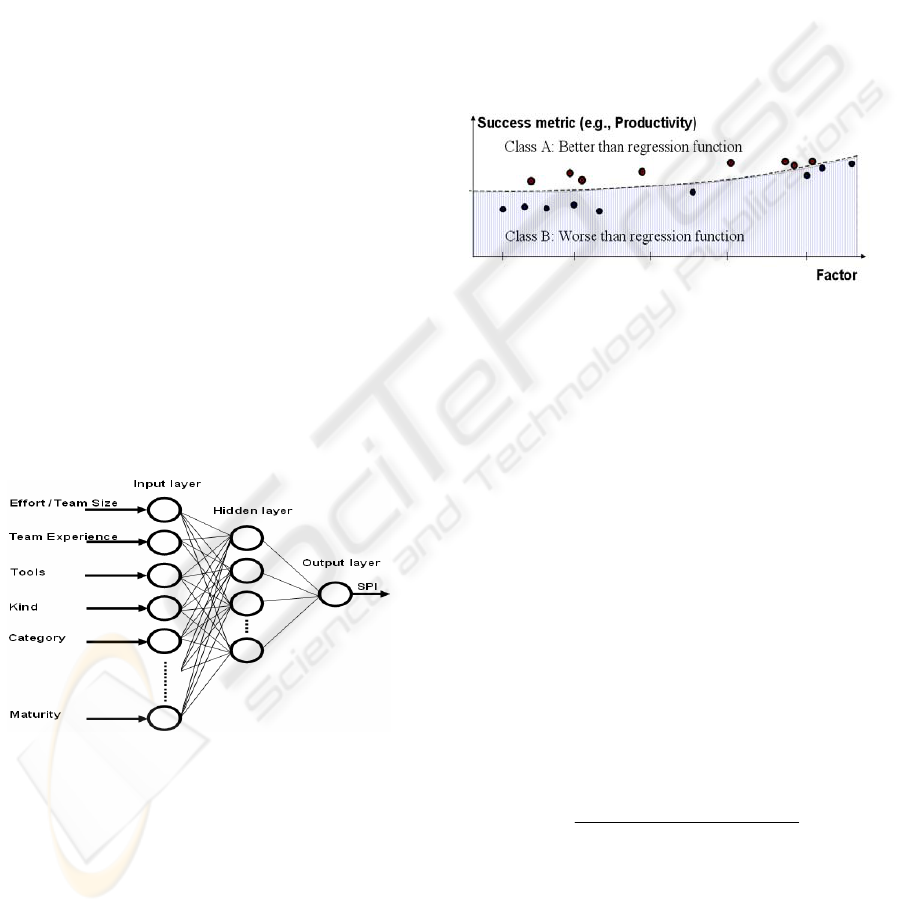
(3) Evaluating non-linear regression function:
Now, we can build an ANN, for regression, as
depicted in Figure 4, where input variables
(independent variables) are the impacting factors
said above, and the output (dependent variable) is
the regression function estimate (on the success
metric).
Using this regression function, we can divide our
past projects between the successful and failed ones.
In particular, if a project got a threshold value better
than the regression function it is considered as a
success, if this value was worse than regression
function, it is considered as a failure. Note that, all
the projects can belong to just one of those classes.
Figure 4: A Multi-layered Fed-forward Neural Network
(Perceptron) for estimating regression functions.
Figure 5 depicts a trivial case in two dimensions. We
show such an example because it can be represented
on a plane. In a real case (e.g., Figure 4), we could
have many factors and just one success metric. It is
important to note that, what we are actually
calculating is an iperplane that splits the considered
iperspace into two disjoined subsets. Class A is the
success class and class B is the failed one.
(4) Rejecting non-relevant factors: It is possible
prove (Dreyfus, 2005) that an ANN that has a
minimal configuration in terms of input variables
and internal parameters (hidden units) provides the
best regression function estimate. This characteristic
is called parsimony. Therefore, over this stage, we
should reject factors that do not impact on the
success metric as well as shrink the ANN internal
configuration (hidden units) as much as possible. In
order to carry out this task, we can apply many
different techniques, such as Principal Component
Analysis (Jollife, 1986), Wrapper for Feature Subset
Selection (John, Kohavi, Pfleger, 1994), Cross-
validation or Leave-one-out (Dreyfus, 2005).
Figure 5: Two-dimension regression function that splits
the plane into two disjoined subsets. The dashed line is a
threshold function.
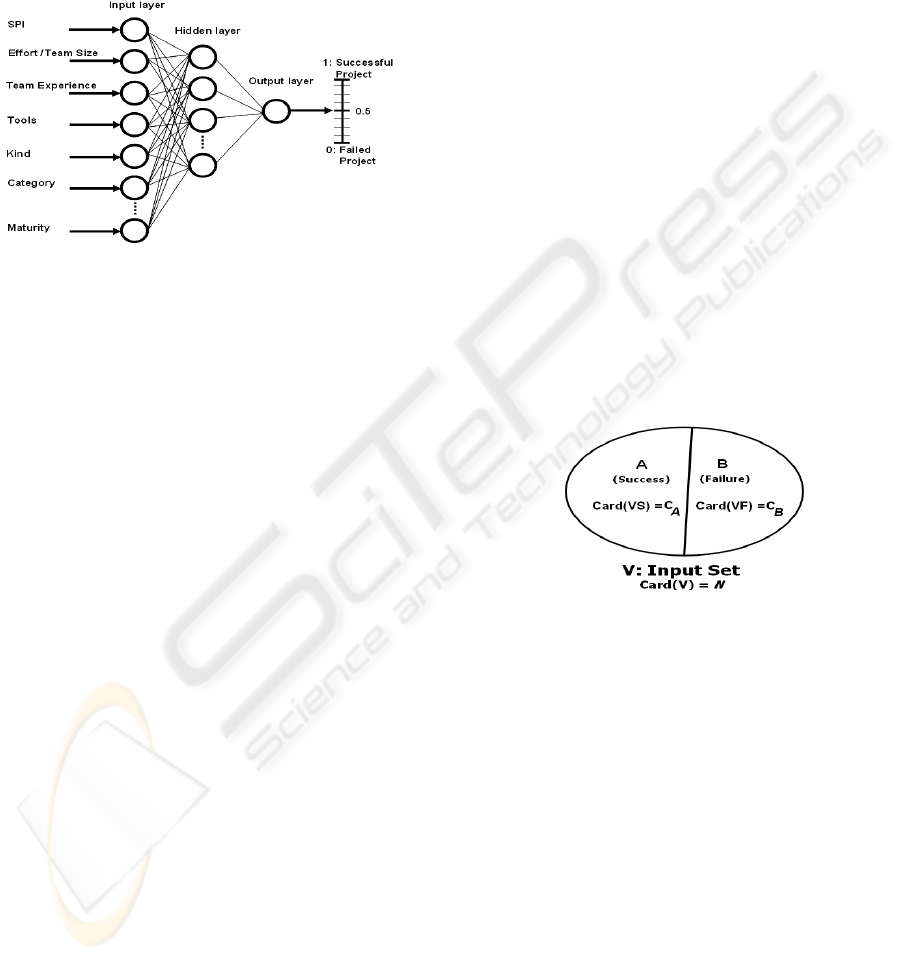
(5) Building a Two-Class Classification Network:
So far we have turned our evaluation problem into a
two-class discrimination problem. Now, we build a
new network, for discrimination, as depicted in
Figure 6. Such a system is able to classify all
possible inputs as belonging to A or B. Actually, we
can obtain much more from this kind of network. In
fact, this is able to provide the posterior probability
said above (Bishop, 1995). This is a very important
result because, generally, Bayes’ theorem has just
theoretical importance, but it cannot be practically
applied. The problem is that we cannot know all
terms of Equation (2) right side.
In order to explain this problem let us consider
Equation (2). Let Pr(A | x) be the posterior
probability that Bayes’ theorem provides, that is,
the probability that the considered project belongs to
A after its measurements have been executed.
B)Pr(B)|(xpA)Pr(A)|(xp
A)Pr(A)|(xp
x)|Pr(A
XX
X
+
=
(2)
Pr(A) and Pr(B) represent prior probability of
class A and B respectively, p
X
(x | A) and p
X
(x | B)
represent the probability density that x occurs
conditioned to class A or B, that is, the probability
that x occurs with respect to A or B.
The real problem is that we could, somehow, get
estimates for P(A) and P(B), but we are not able to
ICSOFT 2007 - International Conference on Software and Data Technologies
172
estimate p
X
(x | A) and p
X
(x | B), that is, Bayes’
Theorem is not useful for real classifications. Based
on the mathematical proof reported in (Bishop,
1995), if we use an ANN like the one that Figure 6
depicts, we can directly obtain Pr (A | x) even if we
cannot know the conditioned probabilities said
above.
Figure 6: An Artificial Neural Network for two-class
discrimination problems.
3.3 Prior Probability Estimate
So far we have shown that if we use a particular
ANN for two-class discrimination, we can directly
calculate the posterior probability. Now we show
how to estimate the prior probability, that is, the
probability that a project can achieve a stated
objective before the project starts.
Let us observe that an individual input for the
network in Figure 6 is a vector V
i
, like Expression
(3) shows, where, v
i,1
, v
i,2
, …. , v
i,n
are the V
i
‘s
components and stand for the actual values that the
network receives as an input.
V
i
= (v
i,1
, v
i,2
, …. , v
i,n
) (3)
V
i
is a generic vector that represents the i
th
project, and the second number (1 through n)
represents the index of the input variables. With
regards to Figure_6, for instance, the values in
Expression (4) might be gathered.
In order to obtain all the possible V
i
instances
that the network can receive in input (henceforth we
are denoting those vectors by the term Input Set,
writing V), we consider the Cartesian in Expression
(5), where {v
i
}, is the set of all possible values that
the i
th
component of V can get. As experimentalists,
we often call {v
i
} with Factor and the values that it
can get (v
i,1
, v
i,2
, …. , v
i,n
) with Levels or
Treatments.
v
i,1
= {Val(SPI)} = {0.9},
v
i,2
= {Val(Effort/TeamSize)} =
{1000/20}= {50}
…
(4)
V = {v
1
} x {v
2
} x … x {v
i
} x … x {v
n
} (5)
Note that, in a software engineering environment
the cardinality of this Input Set is a finite number,
i.e. the size of {v
i
} is a finite number. For instance,
even if SPI might get real (infinitive) values in [0,
+∞[, actually, significant values for an organization
could lie, for instance, inside [0.4, 1.5]. Moreover,
significant approximations for those elements of the
set [0.4, 1.5] are bounded to the first or second
fractional, that is, finer grain values are not
significant for the organization. For instance, we
could make decision to have, in [0.4, 1.5[, just 11
possible values (0.4, 0.5 … 1.4), i.e. 1 factor and 11
treatments. A question arises naturally:
Expression (6) shows how to calculate the
cardinality of V.
N = Card{v
1
} * Card{v
2
} * ... * Card{v
n
} (6)
Note that, based on the definition of Input Set, V
includes all the significant values for the
organization. As experimentalists we generally call
this set with Population. Now, in order to calculate
the prior probability, we can feed the ANN with the
whole Input Set V and obtain the cardinalities of
both classes, A and B, Figure 7.
Figure 7: Prior probability estimation by a two-class
classification network.
This happens because such a network is able to
classify all possible significant inputs as belonging
to A or B. In particular, the input vector belongs to
A if and only if the ANN output lies inside [0.5,
1.0]. If this output lies inside [0, 0.5[, then the
considered input belong to B (Figure 7).
Let us denote by A the subset of V composed of
all the success vectors and by B the subset composed
of all failure vectors, with {A} ∩ {B} = Φ and {A}
∪ {B} = {V} (Figure 7).
Said C
A
and C
B
the cardinalities of A and B,
respectively, we can calculate the prior probabilities
to be successful (to achieve a project objective) by
Expressions (7). Overall, P(A) represents the
probability that the successful class can occur.
Hence, P(B) = 1 - P(A) is the probability to fail.
Based on historical data, therefore, P(A) value
A STATISTICAL NEURAL NETWORK FRAMEWORK FOR RISK MANAGEMENT PROCESS - From the Proposal to
its Preliminary Validation for Efficiency
173
represents the success probability that the
organization succeeds in developing a project before
the project starts.
P(A) = Card(A)/Card(V) = C
A
/N
P(B)
= CARD(B)/CARD(V) = C
B
/N = 1- P(A)
(7)
Note that, what we have been presented in this
Section could be viewed as a methodology for
estimating prior probability like Bootstrap and
Jacknife (Efron, Tibshirani, 1993) estimate
confidence intervals for population parameters.
4 CASE STUDY
Let us give, now, some demonstrations concerning
the efficiency of the proposed approach by showing
a typical application. As usual in Artificial Neural
Network computation (Dreyfus, 2005), we consider
an artificial set of observations, which we obtained
by a complete randomization. This kind of data is
supposed to be definitely not correlated; therefore, if
we are able to obtain the expected results from this
data set, we can show that this procedure is able to
reach the claimed goal (efficiency). Basically,
artificial data is more useful when one wants to
measure the efficiency of procedures, whereas real
data, which is supposed to be strongly correlated, is
more helpful when one wishes to evaluate the
effectiveness. At this stage, we verify efficiency.
We have taken in account the simulation design
explained below. Based on the proposed strategy
(see Section 3.2), our project objective was to
“Carry out the project on time”. We used the SPI as
a metric for success. Higher SPI values (more or
equal to 1) point out higher performances, and lower
values (less than 1) point out lower performances.
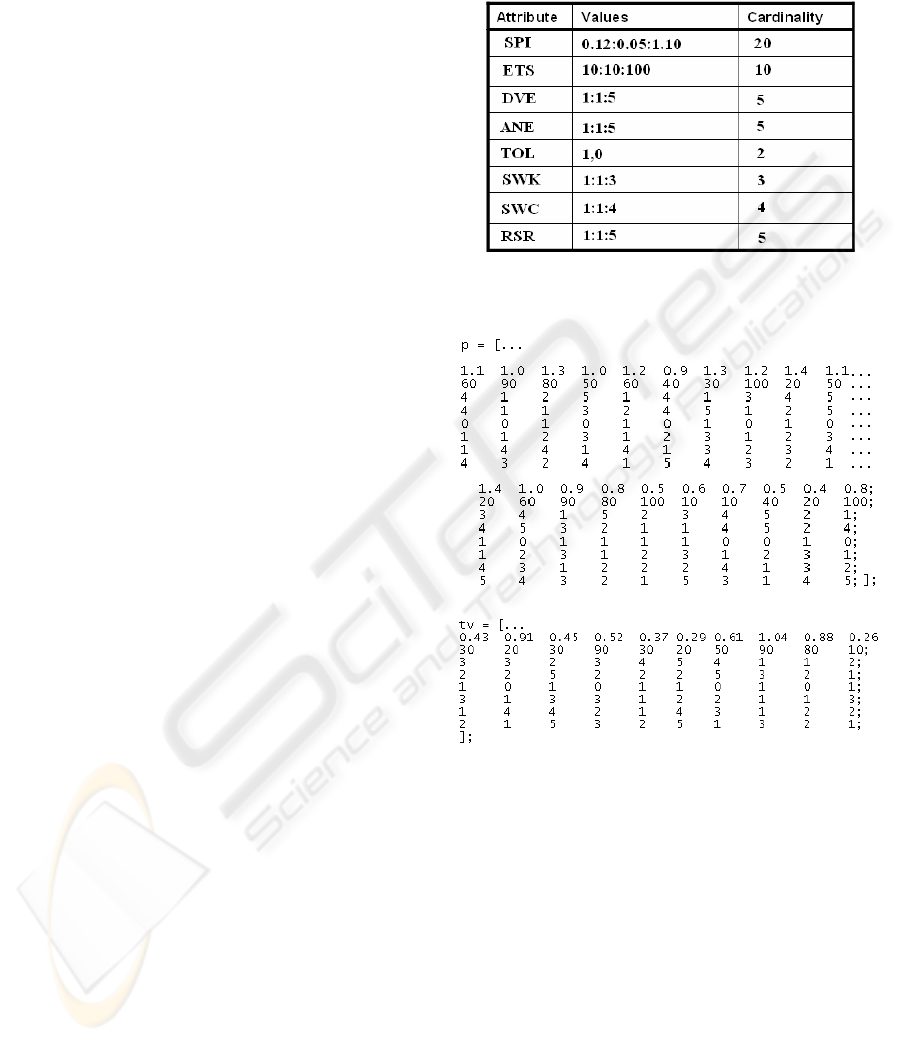
We picked 8 attributes to characterize a project:
Schedule Performance Index (SPI), as already
mentioned, Effort/TeamSize rate (ETS), Developer
Experience (DVE), Analyst Experience (ANE),
Advanced Development Tool Use (TOL), Software
Kind (SWK), Software Category (SWC), Required
Software Reliability (RSR). Table 2 shows all the
values that each attribute could get. In particular, the
cardinality of the Input Set was 600,000 elements.
Firstly, we considered an ANN for regression.
We used a feedforward neural network
(Rumelhart, Hilton, Williams, 1986), (Dreyfus,
2005), made by three levels (one hidden layer), with
7 input units (one for each attribute in Table 2,
except SPI), 5 hidden units, and 1 output unit (SPI).
The hidden unit activation functions were sigmoid
(hyperbolic tangent) and the output had a linear
function.
Table 2: Project attributed taken in consideration.
Table 3: Project data (columns) and instructions (bottom)
as provided to MatLab
™ for simulation.
As a training set of this regression network, we
considered matrix p (Table 3) except the first row,
which was used as a target set. In particular, each
column of p represents a past project and each row
represents all of the observations on the considered
input variable. A completely randomized validation
set (matrix tv, Table 3), was also considered. We
trained the network by the optimization algorithm
called Levenberg-Marquardt with early stopping on
matrix tv (validation set) and mean square error
(network performance) of 0.05. In order to increase
the performance of this regression network, firstly,
we carried out data normalization, that is, we
transformed the training set in a set with mean 0 and
deviation standard 1. Subsequently we performed
Principal Component Analysis (impact rate of an
ICSOFT 2007 - International Conference on Software and Data Technologies
174
input variable less than 0.05) (Jollife, 1986), as said
above (Dreyfus, 2005). Note that, this kind of
analysis reduced our input set from 7 to 6 input
variables. Then, we exploited this regression
network to split the training set into two subsets: the
first one composed of all values of p that showed
SPI values more than regression function (success)
and the second one composed of all other values
(failure). In particular, we obtained the following
classification result, represented by vector t:
t = [0 0 0 1 0 0 1 1 1 0 1 1 0 1 0 0 0 1 1 1];
Where 0 means that the corresponding column in p
belongs to the failed subset, and 1 means that the
corresponding column in p belongs to the success
subset. Therefore, for instance, the first three
columns of p belong to the failed subset and the
fourth one belongs to the success subset. Then, we
built a classification network where the training set
was the overall matrix p and the target set was t
(Lanubile, Visaggio, 1997). The topology of this
classification network was also of 5 hidden units of
hyperbolic-tangent activation functions and an
output unit of sigmoid logarithmic function. We also
trained this second network, by the Levenberg-
Marquardt algorithm with early stopping on the
overall matrix tv and mean square error of 0.05. The
target vector for the validation set was tt = [0 1 0 0 0
0 0 1 1 0]. Also for this second network, we carried
out data normalization and Principal Component
Analysis (rate = 0.05), which reduced our training
set from 8 to 7 input variables. We made use of
MatLab™ Neural Network Toolbox for training all
of the considered networks and performing principal
component analysis. In order to evaluate the
performance of this second network, we used
VMRE (the mean square error calculated on the
validation set) and TMRE (the one calculated on the
training set). We obtained the following
performances:
VMRE = 0.2204
TMRE = 0.0304
(8)
Notice that, although the validation set was obtained
by a complete randomization (there should be no
correlation between training set and validation set),
we obtained acceptable results using, as well.
Finally, we calculated the prior probability as
said above. In particular, the cardinality of Input Set
(V) was N = 600,000, hence, the overall Input Set
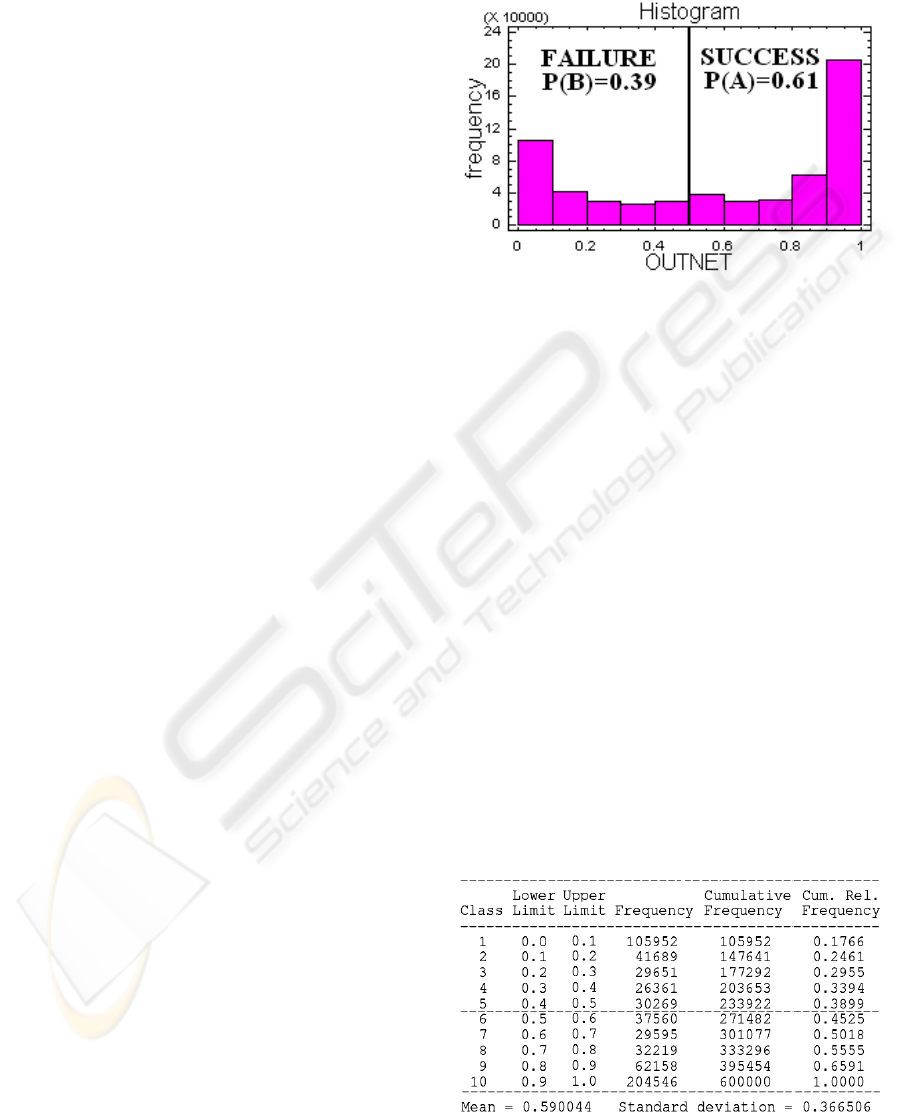
was a matrix 8×600,000. We fed the network with
those 600,000 vectors and obtained the classification
map depicted in Figure 8, where x-axis represents
the network output, and y-axis shows the number of
occurrences for each considered output slot.
Figure 8: Histogram obtained by an Artificial Neural for
Classification.
In Table 4, we reported a descriptive analysis of the
obtained results. The calculation of the prior
probability, that is, the success/failure probability
before the project starts, is executed by Expression
(9).
P(A) = 366,078/600,000 = 0.61
P(B) = 233,922/600,000 = 0.39
(9)
As said in Section 3.3, we split the histogram in
Figure 8 by considering OUTNET = 0.5, as a bound,
where OUTNET stands for artificial neural network
output. Note that, for each possible value that we
provide to the classification network (typically the
Input Set IS), we get a value that represents the
posterior probability that the considered input
belongs to class A. Prior and posterior probabilities
thus calculated can be used, respectively, as a
probability estimate in achieving project objective
before the project starts (Analysis phase) and
whenever a further project iteration has been carried
out (Control phase).
Table 4: Descriptive Analysis of results.
A STATISTICAL NEURAL NETWORK FRAMEWORK FOR RISK MANAGEMENT PROCESS - From the Proposal to
its Preliminary Validation for Efficiency
175
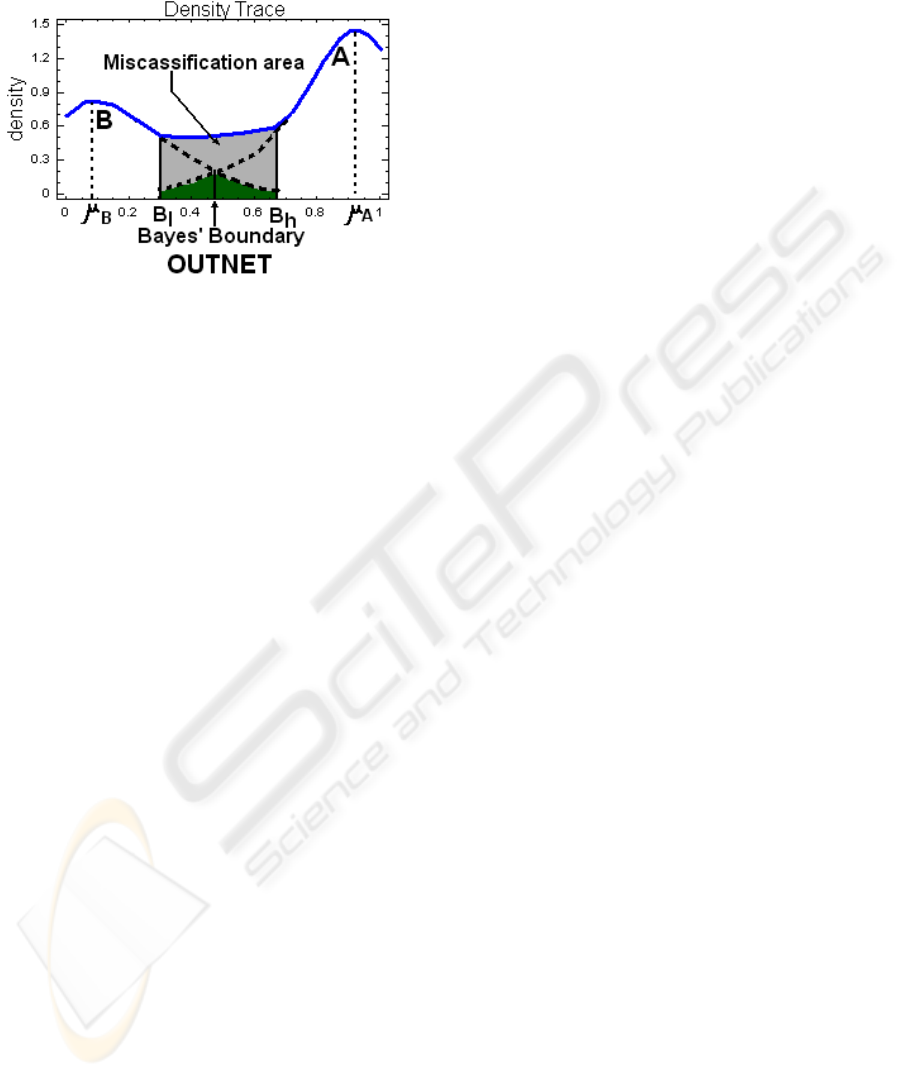
In figure 9, we reported further representation of the
classification.
Figure 9: A geometrical interpretation of Bayes’ decision
rule.
The blue continuous line is the obtained probability
density function. Concerning Figure 9, in a
theoretical case, those two dashed tails (Figure 9)
together with their continuances (blue) would
represent the probability density functions that a
generic element in the population belongs to A or B,
respectively. Green area, below their intersection, is
the theoretical misclassification area, that is, the one
that Bayes’ theorem would address. Actually, we got
the blue continuous line. Therefore, the actual
misclassification area is the one that is bounded by
B
l
and B
h
(grey and green area). Figure 9 also shows
that, if we pick up OUTNET = 0.5 as a class
boundary, we can correctly manage this
misclassification area and obtain the expected
results.
5 METHODOLOGY
IMPROVEMENT
It is important noting that, performances of such a
classification network could be improved by
carrying out cross-validation (Dreyfus, 2005).
Sometimes, real applications do not allow us to split
training set into two subsets, the one for training and
the other for validating. For this reason, in order to
evaluate the generalization capability of such a
network, we could apply leave-one-out technique.
For more details about those optimization
procedures, it is worth consulting (Dreyfus, 2005)
and (Bishop, 2006), which provide sound
mathematical motivations about the optimization of
ANN(s) together with a number of practical
implementation techniques.
6 CONCLUSION AND FUTURE
WORK
This paper proposed a new model for risk
evaluation, and an approach to build a statistical
neural network-based framework for supporting risk
management process. We showed that such a tool is
able to provide suitable probability estimates
exploiting both prior information (the one that is
available before the project starts) and posterior
information (the one that is available after events
have occurred). Future work will be concerned with
using data gathered by real applications for
effectiveness validation of the proposed approach.
Our prospective work should also investigate its
effectiveness when it is used together with other
frameworks in terms of reliability and effort
improvement in carrying out risk management
process.
ACKNOWLEDGEMENTS
We would like to thank people at the University of
Maryland Empirical Software Engineering Group
for discussing topics presented above, and providing
suggestions for improvement.
REFERENCES
Alberts, C.J., 2006. Common Element of Risk. TN-014,
pp. 1-26, CMU/SEI.
Basili, V., Caldiera, G., and Cantone, G., 1992. A
Reference Architecture for the Component Factory.
Transactions on Software Engineering and
Methodology
, vol. 1(1): 53-80, ACM.
Basili, V. R., Caldiera, G., Rombach, H. D., 1994.
Goal
Question Metric Paradigm
. In Encyclopedia of
Software Engineering, Ed. J.J. Marciniak, John Wiley
& Sons.
Basili, V. R., Caldiera, G., Rombach, H. D., 1994.
The
Experience Factory
. In Encyclopedia of Software
Engineering, Ed. J.J. Marciniak, John Wiley & Sons.
Berntsson-Svensson, R., Aurum, A., 2006. Successful
Software Project and Product: An Empirical
Investigation. In
ISESE06, Intl. Synposium on
Empirical Software Engineering
, IEEE CS Press.
Bishop C., 1995.
Neural Network for Pattern Recognition,
Oxford University Press.
Boehm, B.W., 1989.
Tutorial on Software Risk
Management
, IEEE CS Press.
Boehm, B.W., 1991. Software Risk Management:
Principles and Practices,
IEEE Software, No. 1, pp.
32-41, IEEE CS Press.
ICSOFT 2007 - International Conference on Software and Data Technologies
176

Briand, L.C., Basili, V.R., Thomas, W.M., 1992. A Pattern
Recognition Approach for Software Engineering Data
Analysis.
Transactions on Software Engineering, Vol.
8, No. 1, pp. 931-942, IEEE CS Press.
Cantone, G., Donzelli, P., 2000.
Production and
Maintenance of Goal-oriented Measurement Models
.
Intl. Journal of Software Engineering & Knowledge
Engineering, Vol. 10, No. 5, pp. 605-626. World
Scientific Publishing Company.
Charette, R.N., 1989.
Software Engineering Risk Analysis
and Management
, McGraw-Hill.
Chen, Z., Mezies, T., Port, D., Boehm, B. W., 2005.
Feature Subset Selection Can Improve Software Cost
Estimation Accuracy. PROMISE06, Conference on
Predictor Models in Software Engineering. ACM.
CMMI Product Team, 2002. Capability Maturity Model
Integration (CMMI), Version 1.1.
TR-012, pp. 397-
416, CMU/SEI.
Dreyfus G.,
Neural Networks Methodology and
Applications
, Springer, 2005.
Efron B. and Tibshirani R. J..
An Introduction to the
Bootstrap
, volume 57 of Monographs on Statistics and
Applied Probability. Chapman & Hall, 1993.
Fussel, L., Field, S., 2005. The Role of the Risk
Management Database in the Risk Management
Process.
ISCEng05, International Conference on
Systems Engineering
, IEEE CS Press.
Higuera, R.P. , 1996. Software Risk Management.
TR-012,
pp. 1-48, CMU/SEI.
John G., Kohavi R., Pfleger K., 1994.
Irrelevant features
and the subset selection problem
. 11
th
Intl. Conference
on Machine Learning
, pp. 121-129. Morgan
Kaufmann.
Jollife I.T., 1986.
Principal Component Analysis,
Springer.
Jones, C., 2002. Patterns of large software systems: failure
and success.
Computer, N.o 23, pp. 86-87, IEEE CS
Press.
Madachy, R.J., 1997. Heuristic Risk Assessment Using
Cost Factors.
Software, pp. 51-59, IEEE CS Press.
Piattini, M., Genero, M., Jiménez, L., 2001.
A Metric-
Based Approach for Predicting Conceptual Data
Models Maintainability
. Intl. Journal of Software
Engineering and Knowledge Engineering 11(6): 703-
729, World Scientific.
Rumelhart, D.E., Hilton, G.E., Williams, R.J., 1986.
Learning internal representations by error propagation,
Nature, pp. 318-364, Nature Publishing Group.
Karolak, D.W., 1997.
Software Engineering Risk
Management
, IEEE CS Press.
Kontio, J., 1996. The Riskit Method for Software Risk
management, Version 1.00.
TR-3782, UMDCS.
Lanubile, F., Visaggio, G., 1997. Evaluating Predictive
Quality Models Derived from Software Measures:
Lessons Learned. JSS p. 38:225-234,
Journal of
Systems and Software
, Elsevier.
Linberg, K.R., 1999. Software developer perceptions
about software project failure: a case study
. JSS, pp.
177-192,
Journal of Systems and Software, Elsevier.
Procaccino, J. D., Verner, J. M., Lorenzet, S. J., 2006.
Defining and contributing to software development
success.
Commununications of the ACM, No. 49,
ACM.
Roy, G. G., 2004. A Risk management Framework for
Software Engineering Practice.
ASWEC04, Australian
Software Engineering Conference
. IEEE CS Press.
Sarcià A. S., Cantone, G., 2006. Using Artificial Neural
Networks to Improve Risk Management Process.
TR06, ESEG-DISP, Univ. of Roma Tor Vergata.
Srinivasan, K., Fisher, D., 1996. Machine Learning
Approaches to Estimating Development Effort.
Transactions on Software Engineering, IEEE CS
Press.
Standish Group, 1994. CHAOS Report 1994-99.
http://www.standishgroup.com, last access Feb. 2006.
Tversky A., and D. Kahneman, 1974. Judgment under
Uncertainty: Heuristic and Biases, pp. 1124-1131,
Science, AAAS Press.
Verner J.M., Cerpa N., 2005. Australian Software
Development: What Software Project Management
Practices Lead to Success?
ASWEC05, Australian
Software Engineering Conference
. IEEE CS Press.
Wallin, C., Larsson, S., Ekdahl, F., Crnkovic, I., 2002.
Combining Models for Business Decisions and
Software Development. Euromicro02,
Euromicro Intl.
Conf.
, pp. 266-271, IEEE CS Press.
Williams, R.C., Pandelios, G.J., Behrens, S.G., 1999.
Software Risk Evaluation (SRE) Method Description
(Version 2.0).
TR-029, pp. 1-99, CMU/SEI.
A STATISTICAL NEURAL NETWORK FRAMEWORK FOR RISK MANAGEMENT PROCESS - From the Proposal to
its Preliminary Validation for Efficiency
177
