
DYNAMIC DECENTRALIZED SERVICE ORCHESTRATIONS
Ustun Yildiz
1,2
and Claude Godart
1
1
INRIA - LORIA
BP 239 Campus Scientifique11
F-54500 Vandœuvre-l`es-Nancy, France
2
Gabriel Lippmann Research Center
41, rue du Brill
L-4422 Belvaux, Luxembourg
Keywords:
Web Services, Decentralized Orchestration, Peer-to-Peer Computing, Workflow, Dynamic Service Composi-
tion.
Abstract:
This paper reports a new approach to decentralized orchestration of service compositions. Our contribution is
motivated by the recent advances of service orchestration standardizations that enable the exchange of modeled
processes among different tools and organizations. Precisely, we provide an efficient process transformation
technique that converts a process conceived for centralized orchestration to a set of nested peer processes. Each
peer process is conceived to be executed by a dynamically orchestrated service. Assuming that services are
invokable with peer processes, we provide a decentralized orchestration setting where services can establish
direct interconnections via the peer processes that they execute. Our proposition considers conversation-based
services and dynamic service binding.
1 INTRODUCTION
Web services are emerging as a new standardized
way to design and implement business processes
within and across enterprise boundaries. Basic XML-
based service technologies provide simple but pow-
erful means to model, discover and access software
applications over the Web. The term orchestration is
used to describe the design and implementation issues
of the combination of distinct services into a coherent
whole in order to fulfill sophisticated tasks that can-
not be fulfilled by a single service. Service orches-
tration and workflow management have many simi-
larities for both design and execution aspects. A ser-
vice orchestration environment implicitly assumes a
centralized execution setting where orchestrated ser-
vices interact with a centralized orchestrator service
as analogous to traditional workflow management.
As the relevant workflow literature (Chen and Hsu,
2001)(Alonso et al., 1995) confirms, this approach
falls short of supporting a wide range of ubiquitous,
mobile , large-scale and secure process management.
In view of these challenges, it is desirable to imple-
ment decentralized orchestration settings where or-
chestrated services can establish direct interconnec-
tions following the principles of peer-to-peer comput-
ing. The key question of this approach is how com-
posed services that work following simple ”request-
response” and ”one-way” communication modalities
can be able to establish direct interconnections with
services other than the orchestrator that invokes them
for the purpose of the same process that they are in-
volved in.
In addition to basic service technologies, ser-
vice orchestration is the subject of various spec-
ification and standardization efforts. Among
others WS-BPEL(IBM et al., 2005) (BPEL for
short) has emerged as the de-facto standard for
implementing service orchestration by means of
processes(Weerawarana et al., 2005). A major out-
come of process standardization is the common com-
prehension and execution semantics that they pro-
vide. With respect to commonly agreed process spec-
ifications, processes can be moved between distinct
tools and organizations and then it is very reason-
able to assume that orchestrated services can execute
processes. Consequently, a service that can behave as
an orchestrator can manage sophisticated interactions
with other services following the application logic of
the process that it executes. Following the motiva-
36
Yildiz U. and Godar t C. (2007).
DYNAMIC DECENTRALIZED SERVICE ORCHESTRATIONS.
In Proceedings of the Third International Conference on Web Information Systems and Technologies - Internet Technology, pages 36-45
DOI: 10.5220/0001273000360045
Copyright
c
SciTePress
tion that services can be able to execute processes,
this paper takes on the challenge of designing a tech-
nique that enables decentralized orchestration. Our
proposition introduces the concept of peer process.
Peer processes are partitions of centralized orchestra-
tion specification. Each peer process is executed by
a dynamically orchestrated service. Peer processes
behave as cooperating workflows during the execu-
tion and enable truly peer-to-peer interactions of or-
chestrated services. Thus, our precise contribution
is to provide such peer processes using initial peer
process specification. As we mentioned above, our
approach assumes that services can execute processes
which can be also considered as they are invokable
with processes rather than their regular input. The
proposed approach is not an attempt to solve all of
the problems of decentralized process executions, our
aim is to provide a level of automation for the distri-
bution of relevant peer processes on autonomous ser-
vices. In the remainder of this paper, we present our
model that enables decentralized orchestration with
peer processes. The proposed technique that provides
peer processes deals with many different aspects of
decentralized orchestrations. First, it supports dy-
namic binding of services and introduces a new syn-
chronization technique for services that are likely to
be concurrently bound. We consider the orchestration
of conversation-based services where service inter-
faces externalize the business protocol supported by
the latter. Moreover, with the modeled processes, we
are taking sophisticated control and data dependen-
cies of process activities into account. Next subsec-
tion presents a motivating example and overviews our
approach. Section 2 describes a language independent
process model that we use to reason with processes.
Section 4 presents the core of our contribution. Sec-
tion 5 discusses the current status of our architectural
consideration while the last section reviews very re-
lated works and concludes.
1.1 Motivating Example and Overview
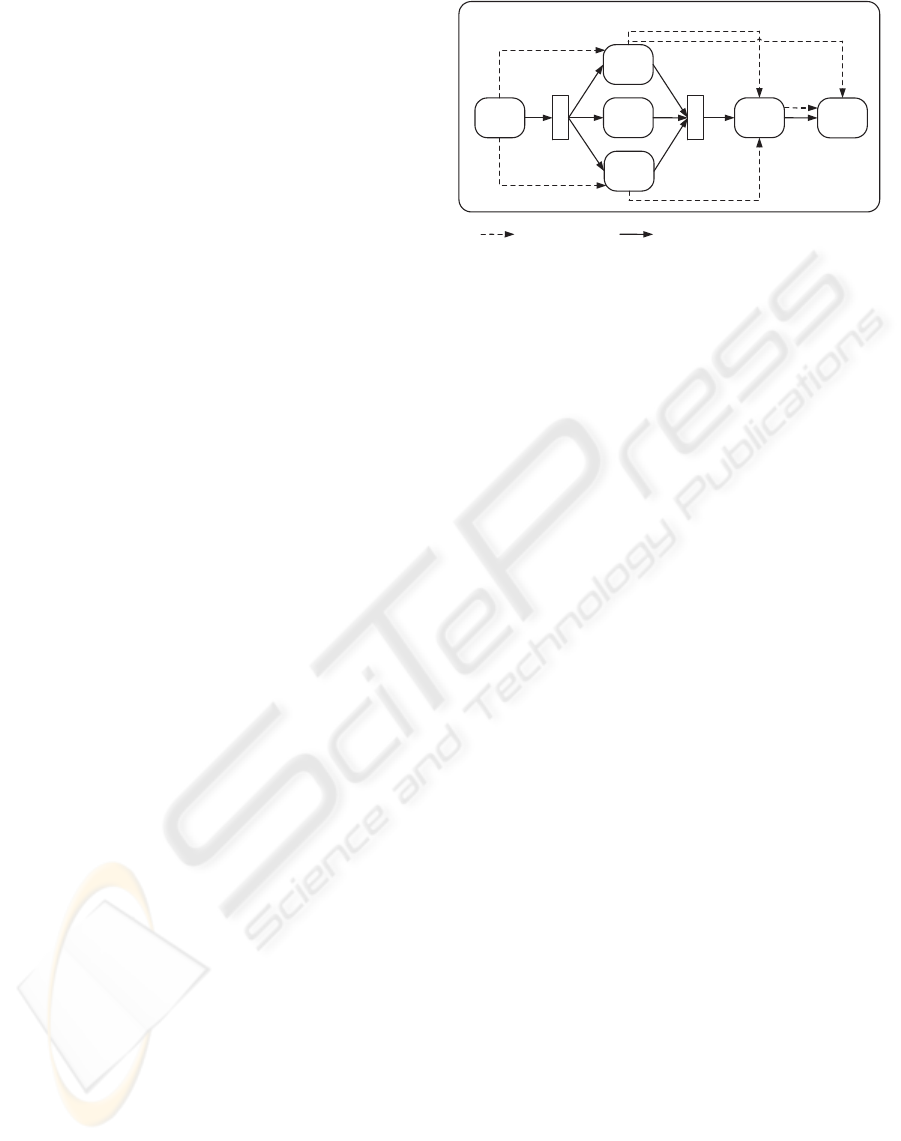
As example scenario, we consider the manner in
which the claim of a policyholder is handled by an
Insurance Company (IC) service. Figure 1 outlines
the process executed by IC. It depicts different activi-
ties that consist of service interactions with their con-
trol/data dependencies and interacting service identi-
ties. A control dependency expresses a precedence
relationship of two activities while a data edge means
that the data provided by an activity is used as the
input of another. In the process, first, IC contacts
Emergency Service(ES) that the policyholder con-
tacted at the time of accident in order to receive the in-
a
1
:ES
A
N
D
a
2
:H
a
4
:P
A
N
D
a
5
:Ins
a
6
:DS
a
3
:DS
IC
Data dependency
Control dependency
Figure 1: Process Example for Insurance Case.
formation relevant to Hospital(H) and Police(P) ser-
vices that hold accident reports. After the invocation
of ES, P and H are invoked with the outcome pro-
vided from ES and a Delivery Service (DS) is pro-
visioned. It should be noted that DS provisioning ac-
tivity (a
3
) does not require any data provided by ES.
However, DS requires the outcome of H when it is
invoked a second time by activity a
6
. After the invo-
cations of P and H, concurrently received reports are
used to invoke an independent Inspection(Ins) ser-
vice to decide whether the claim must be reimbursed.
The outcome of Ins and H are sent to the policyholder
using DS (a
6
). In this example, DS is a conversation-
based service as it is invoked twice during the same
process.
Centralized Orchestration. In a centralized orches-
tration, all of the exchanged messages flow back and
forth through IC that is the centralized orchestrator
service. For example, when IC invokes ES, the for-
mer receives the outcome of ES and then uses it to
invoke H and P. Similarly, the outcomes of H and P
are received by IC and sent to Ins from IC. In the same
time, the outcome received from H is also sent to DS
from IC in a successive stage of the process.
Decentralized Orchestration. If a decentralized or-
chestration setting is required, IC can invoke ES and
ES that terminates its execution can send its outcome
to H and P. In the same time, as the first activity that
interacts with DS(a
3
) has a incoming control depen-
dence with ES, ES can invoke DS. Similarly, H and
P can send their outcomes directly to Ins. It should
be noted that in order to execute a
5
of Ins, a
3
must be
terminated. Consequently, DS must inform Ins about
the termination of a
3
. When H sends its outcome to
Ins as the input of a
5
, it can send the same outcome
to DS as it is used by a
6
too.
Dynamic Service Binding. One important point that
must be considered is the dynamic binding of services
rather than their binding at design time. Following the
same decentralized approach, ES must be able to dy-
namically bind H, P and DS before it sends its out-
DYNAMIC DECENTRALIZED SERVICE ORCHESTRATIONS
37
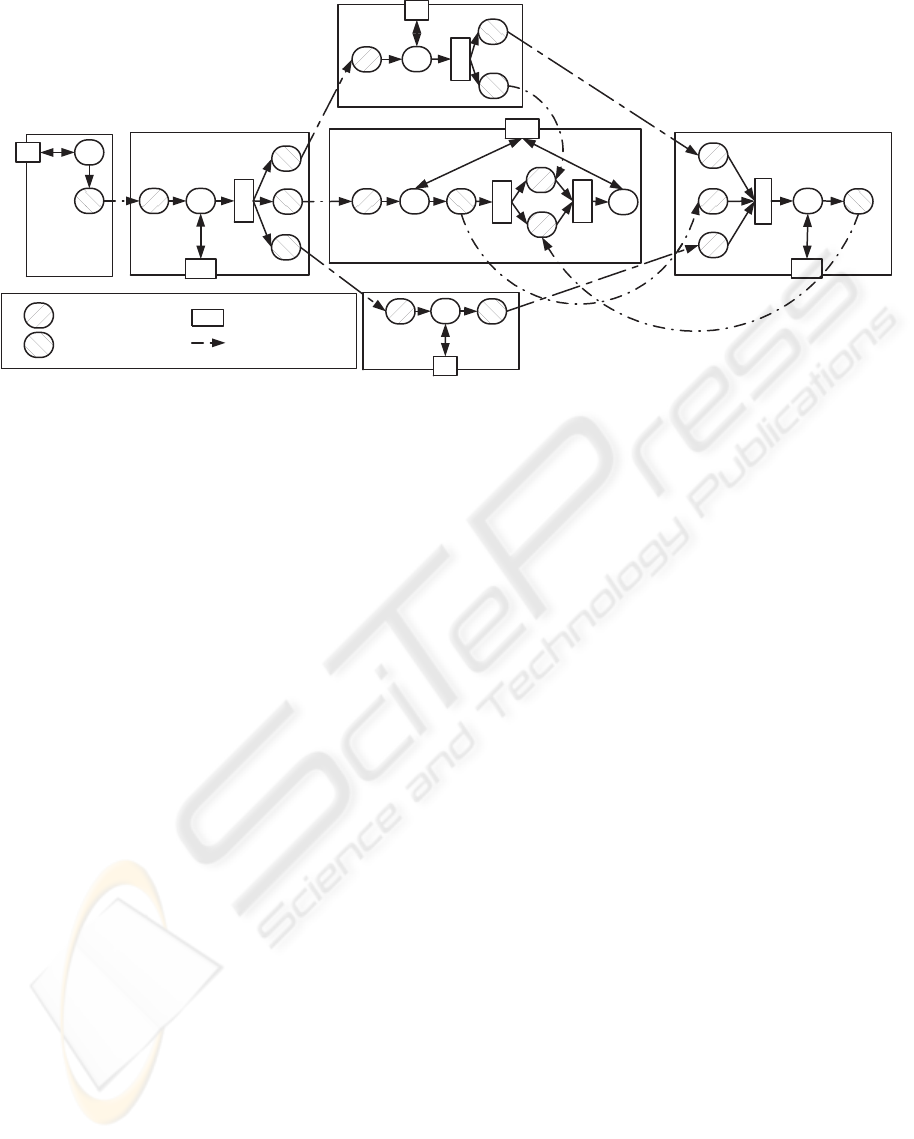
S
Data receiving activity
Data sending activity
Service implementation
Interactions between
peer processes
P
i
P
P
P
H
P
ES
P
IC
H
H
ES
A
N
D
P
P
ES
IC
IC
Ins
Ins
A
N
D
P
DS
DS
DS
DS
A
N
D
A
N
D
A
N
D
Figure 2: Decentralized Orchestration of Insurance Case.
come to them. In their turn, H, P and DS can bind
commonly an Ins that they can invoke. It should be
noted that Ins must not bind the service DS to which
it can send its outcome, because DS has been bound
in its previous step by ES. However, Ins must know
the service DS to which it must route its outcome.
Decentralized orchestration can be enabled if the
service interfaces support sophisticated P2P interac-
tions. For example, in the centralized orchestration
H must have some operations that receive the identity
of the service Ins to which it must route its outcome
instead of responding to IC that invokes it. Thus, in
centralized execution, with its regular input IC can in-
form Ins about where to send its relevant outcome.
However, if all of the service interfaces do not in-
clude the relevant operations to support decentralized
orchestration, it is not possible to have the above set-
ting.
With our approach, we aim to enable sophisticated
P2P interactions via the peer processes that are exe-
cuted by orchestrated services. A peer process that a
service S executed is noted P
S
. Let’s take the service
H. With respect to its simple interface, we aim to al-
low it to route its outcome to Ins. We make it execute
a peer process P
H
that receives the data sent by ES,
invokes the core operations of H characterized by a
2
,
and routes the outcome of a
2
to Ins which executes in
fact P
Ins
. In the same way, P
H
send the same outcome
to P
DS
. It should be noted that ES is supposed to ex-
ecute its peer process denoted by P
ES
that receives
the invocation message of P
IC
, executes a
1
and routes
the outcome of a
1
to P
H
and P
P
. The same setting is
considered for other services that have to route their
outcome to other services directly. Figure 2 depicts a
decentralized setting of the motivating example with
peer processes. As readers will notice immediately,
peer processes are not direct partitions of the origi-
nal process specification. They include additional ac-
tivities that enable interactions with other processes.
If the dynamic binding is supported, peer processes
must include activities that accomplish service bind-
ing operations. For example, if DS, H and P are re-
quired to be dynamically bound, the first peer process
that must interact with them, which is P
ES
, must bind
them. Moreover, their corresponding peer processes
that are P
DS
, P
H
, P
P
must be deployed by P
ES
in or-
der to involve them in the overall decentralzied or-
chestration. Consequently, P
ES
must include the peer
processes that it must deploy.
2 PROCESS MODEL
This section describes the formal underpinnings of
our approach that requires rigorous semantics on
modeled processes. It is important to clarify what we
do not intent to propose a new process language or
extends an existing one. The presented concepts are
applicable to a variety of process modeling languages
and execution engines. A process can be represented
as a message passing program modeled by a directed
acyclic graph (Leymann and Roller, 2000)
Definition 1 (Process) A process P is a tuple (A, C,
E
c
, E
d
, D) where A is the set of activities, C is the set
of control connectors, E
c
⊆ A × C × A is the set of
control edges, E
d
⊆ (A × A) × D is the set of data
edges and D is the set of data elements.
A process P has a unique start activity, denoted with
a
s
, that has no predecessors, and has a unique final ac-
WEBIST 2007 - International Conference on Web Information Systems and Technologies
38

tivity, denoted with a
f
, with no successors. A control
edge from an activity a
i
to another activity a
j
means
that a
j
can not be executed until a
i
has reached a cer-
tain execution state (termination by default). A data
edge exists between two activities if a data is defined
by an activity and referenced by another without inter-
leaving the definition of the same data. For example,
a data received from a service s
i
with the execution
of an activity a
i
can be used as the input value of an
activity a
j
that consists of an interaction with a ser-
vice s
j
. In this case, there is a data edge between a
i
and a
j
. It should be noted that our process model-
ing does not consider control edges between control
connectors. We associate source, target: E
c
∪ E
d
→
A functions return the target and source activities of
control and data edges. With respect to control flow
we can also define a partial order, denoted by ≻, over
A, with ≻ ⊆ A × A such that a
i
≻ a
j
means there is
a control path from a
i
to a
j
.
A service oriented process consists of synchro-
nous/asynchronous interactions with services and lo-
cally executed activities such as variable assignments.
We can define a function ser: A → S that returns a
service interacted with an activity. As the dynamic
service binding is supported, the return value of func-
tion ser can be a real service instance if there is al-
ready a bound service and if not it can be another
value that identifies the service that is supposed to
interacted with that activity. Thus, we can define a
process activity as below.
Definition 2 (Activity) An activity a is a tuple (in,
out, s, type) where in, out ∈ D that are input and
output values of a, s ∈ S is the interacting service
with S is the set of services, and type ∈ Σ
A
is the
type of activity with Σ
A
is the set of activity types.
The set of activity types can be defined as follows
Σ
A
= {read, write, write/read, local} where read
activities receive data from services, write activities
send data to services, write/read activities consists of
synchronous interactions that sends a data and waits
the reply and finally, local refers to activities that do
not consist of service interactions. During the exe-
cution of sophisticated processes, some services can
be used with conversations. This means that dif-
ferent operations of the same service can be inter-
acted several times with distinct activities. The ac-
tivities that characterize these conversation-based in-
teractions with the same service are correlated activ-
ities
1
. In our example, activities that refer to interac-
tions with the same DS service are correlated. The
set of correlated activities belonging to a service s
i
is
denoted by A
s
i
.
1
Note that the term of correlation is literally different
from the usual correlation term used in BPEL
Activities of a process are structured using control
connectors (or control flow patterns) (van der Aalst
et al., 2003). A control flow connector can be seen as
an abstract description of a recurrent class of interac-
tions based on partial ordering of activities. For ex-
ample, the AND-split connector describes a choreog-
raphy by activation dependencies as following: an ac-
tivity is activated after the completion of several other
activities. Following the works presented in (van der
Aalst et al., 2003) that discusses the concrete imple-
mentation of patterns, we can consider a set of seven
relevant control connectors to use to express differ-
ent activation dependencies of activities. We gather
them into three categories as follows: Sequence,
Split = {AND-split, OR-split, XOR-split} and Join
= { AND-join, OR-join, XOR-join}. For each activ-
ity, with respect to its incoming and outgoing control
and data edges, we can identify two sets that include
corresponding source and target activities pointed by
these edges. The preset of an activity a is •a = {a
i
∈
A|∃d ∈ E
d
∨∃c ∈ E
c
, (source(d) = a
i
∧ target(d) =
a) ∧ (source(c) = a
i
∧ target(c) = a)}. The postset
of an activity a is a• = {a
i
∈ A|∃d ∈ E
d
∨∃c ∈ E
c
,
(source(d) = a
i
∧ target(d) = a) ∧ (source(c) = a
i
∧ target(c) = a)}.
3 PEER PROCESSES
In this section, we describe the core of our decentral-
ization approach. First, we focus on issues related to
the dynamic service binding. Next, we present our
process transformation technique that produces rele-
vant peer processes.
3.1 Service Binding
Service binding is the identification of a concrete ser-
vice for the fulfillment of a single or set of correlated
activities. Both in centralized and decentralized ex-
ecution settings, service binding operations can be
done at different stages of process life cycle. Basi-
cally, a service instance (or endpoint) can be identi-
fied prior to execution or it can be dynamically bound
during the process execution when it must be inter-
acted. The difference of decentralized orchestration
is that there is no centralized entity that does this op-
eration. So, if dynamic service binding is supported,
orchestrated services are also responsible for service
binding operation. It is intuitive that if a peer process
must send a coordination message or a process data
to another peer process, executed by another service,
it must know that process. If the corresponding ser-
vice end-point is not bound yet, the peer process that
DYNAMIC DECENTRALIZED SERVICE ORCHESTRATIONS
39

wants to interact with it, can bind it and deploy its
peer process. Consequently, the outcome can be sent
to the bound service. It should be noted that the
bound service identity must be propagated to other
peer processes that must interact with the same peer
process. At this point, we assume that control and
data messages exchanged among peer processes in-
clude also bound service identities.
Example 1 (Service Binding) In the insurance or-
chestration example, P
ES
must send the outcome of
ES to H and P. In the same time, DS must be in-
voked following the termination of activity a
1
. If at
the moment P
ES
must send its outcome, if there are
no bound H, P and DS services, P
ES
can bind H,
P, DS and deploy their peer processes (this can be
explained also bound services can be invoked with
their respective peer processes that are P
H
, P
DS
, P
H
).
Thus, H and P can receive data sent by P
ES
by exe-
cuting the first activities of their peer processes and
accomplish the rest of their role following their de-
ployed peer processes. In this case, P
ES
must include
relevant activities that bind services and also deploy
corresponding peer processes. In their turn, P
H
, P
P
and P
DS
must interact with P
Ins
. If Ins is expected to
be dynamically bound, P
H
, P
P
, P
DS
can bind a ser-
vice Ins and send their outcome. However, the con-
current binding can cause a synchronization problem
as the former may bind different Ins service instances.
As explained in the above example, when peer
processes are produced, service binding operation
must be taken into account such that only one peer
process binds a precise service and other dependent
peer processes learn the bound service. In order to
do so, we use service binding dependencies. A ser-
vice binding dependency interconnects two activities.
It characterizes service binding and peer process de-
ployment activities that must be executed by the peer
process that executes the source activity of the bind-
ing dependency. With service binding dependencies
we aim to prevent concurrent service binding problem
by privileging a single peer process such that other
dependent peer processes can learn bound services. It
should be noted that during run-time binding opera-
tion is done if there is no service yet bound. More-
over, if an activity that belongs to a set of correlated
activities is considered, the binding operation is done
for the very first activity and correlated activities are
initiated with the identity of bound service. In the ex-
ample, DS is bound only once for the first activity that
it is interacted with. The binding policy that we adopt
postpones service binding operation as late as possi-
ble such that a service is bound in a stage that every
peer process that must interact with bound service’s
process can learn its identity correctly. The identifi-
cation of a binding dependencythat targets an activity
is governed by the control and data dependencies that
target it.
Below, we make a classification of the situations
that define binding dependencies among activities.
With respect to the different dependencies of activi-
ties in the centralized specification and to the under-
lying services, we identify two cases.
Case 1: In the preset activities of an activity a for
which its fulfillment a service is supposed to be dy-
namically bound, there can be one or several activi-
ties. The respective peer processes that execute these
preset activities will have to send messages to the peer
process of a. In the first case that identify binding
dependencies, if there is a unique preset activity a
b
that precedes all of the rest, there is a binding depen-
dency between this activity and a. This means that
the peer process that executes a
b
must bind the ser-
vice for the fulfillment of the activity a and deploy its
peer process. It should be noted that a service can be
dynamically bound to an activity if there is no corre-
lated activity that precedes the former. More formally
this binding dependency can be explained as follows:
|•a|≥1, ∃!a
b
∈•a such that ∀a
i
∈•a, a
b
≻a
i
⇒ a
b
b
→ a.
The relation
b
→ characterizes the binding depen-
dency of two activities. Activity a
b
is executed by
the first peer process that must interact with the peer
process of a. Naturally, the service invoked by a must
be bound by the peer process of a
b
. However, a
b
must be unique and it must precede all preset activ-
ities, because the bound service identity is expected
to be propagated to other peer processes that execute
other peer processes that include preset activities. For
example, if we consider the activity a
2
that interacts
with H, in its preset, there is only a
1
that interacts
with ES. As H is expected to be dynamically bound
and there is no other preceding activity that interacts
with H, there is a binding dependency between a
1
and
a
2
that invoke respectively ES and H.
Case 2: The preset of the activity a include several
activities. In contrast to Case 1, there is not an a
b
in the preset that precedes all of the preset activi-
ties. Thus, an activity outsite of preset activity is
considered as the source of the binding dependency
that targets a. Intuitively speaking, an activity that
precedes all of the preset activities is chosen as the
source of binding dependency. Formally this situation
can be described as follows:
|•a| > 1, ∄a
b
∈ •a, ∃!a
bb
∈ A such that ∀a
i
∈ •a, a
b
≻
a
i
, and a
bb
≻ a
i
⇒ a
bb
b
→ a.
WEBIST 2007 - International Conference on Web Information Systems and Technologies
40

For example, in contrast to case 1, a
5
has three
preset activities. Consequently, if Ins is expected to
be dynamically bound, three peer processes of these
activities can not concurrently bind a service Ins as
they might not bind the same service. The privilege
can not be given to one of them as they have no inter-
actions before the invocation of Ins. In this situation,
we identify an activity that precedes all preset activi-
ties as the source of binding dependency. In the exam-
ple, this activity is a
1
that interacts with ES. With this
dependency, after a
1
is executed, P
ES
binds a service
Ins. Furthermore, as P
ES
has interactions with P
H
,
P
DS
and P
P
, it can inform them about the relevant
identity of Ins service that allows them to send their
outcome to the common Ins.
By definition, there can be more that one activity
a
bb
that precedes all of the preset activities. If this
is the case, one of them must be privileged for
the binding dependency, thus the peer process that
includes it can bind a service to a and peer processes
that execute preset activities can learn bound service
correctly. As we mentioned above, we aim to bind
a service as late as possible. Consequently, among
others a
bb
must be an activity that precedes preset
activities but succeeds other activities that can be
the source of binding dependency. The sketch of
the algorithm that defines the activity a
bb
that is
the source of the binding dependency is informally
described above:
Var:
a
bb
: the set of all a
bb
that ∀a
i
∈ •a, a
i
≺a
bb
.
begin
if ∃!a
bb
min
∈ a
bb
that succeeds all activities then
a
bb min
is the source of binding dependency to a.
if a
bb
min
is not unique then one of them is chosen as
the source of binding dependency (e.g. the activity with the
smallest identification)
end
It should be noted the above algorithm is one of
the possible solutions for privileging an activity as
the source of binding dependency. The important
point that governs the operation is the precedence
of the source activity comparing to preset activities.
With service binding dependencies, each activity
can have at most one incoming binding dependency.
However, it can have several outgoing binding
dependencies. In order to characterize the activities
for which an activity a is the source of their incoming
binding dependencies, we use a(b). For each element
a
i
in a(b), a is the source of the binding dependency
that targets a
i
.
4 PEER PROCESS
The definition of binding dependencies is the very
first step of our decentralized orchestration approach.
The essential part of decentralization is the character-
ization of peer processes. We call this step the pro-
duction of peer processes as they are produced using
a transformation that operates on centralized specifi-
cation. Naturally, this step uses binding dependen-
cies. Peer process production is accomplished in sev-
eral steps. First, let us resume the content of peer
processes. A peer process that is to be executed by
a service s
i
is denoted by P
s
i
. As essential elements,
P
s
i
includes the elements of A
s
i
. Each element a
i
of
A
s
i
is preceded and succeeded by activities that ex-
change coordination and data messages with relevant
peer processes. Activities of A
s
i
can have outgoing
binding dependencies towards other activities which
means that the execution of source activities must be
followed by correspondingbinding operations and the
deployment of corresponding peer processes. Con-
sequently, P
s
i
must include the peer processes that
must be deployed to the services that it has bound.
However, the peer processes included within others
are like regular data elements to the latter that include
them. Another point that must be considered is the
propagation of service identities that are bound fol-
lowing binding dependencies. When peer processes
exchange coordination and data messages, they are
expected to exchange the relevant information about
the bound service identities that they received from
others and bound themselves. Instead of propos-
ing an additional coordination information that carry
bound service identities, we prefer to integrate these
information to exchanged coordination and data mes-
sages. For bound service identities propagation, the
peer processes must be able to update messages with
the service identities that they must send to other peer
processes. Consequently, peer processes must include
locally executed activities for update operations. In
this way, when a peer process learns the identity of a
bound service, it can update messages that it sends to
other processes.
We identify two main steps to examine the pro-
duction of peer processes. The first step operates on
single activity level and consists of adding relevant
activities that enable the interaction with other peer
processes concerning that activity. The second step
deals with two issues: the first is the structuring of
correlated activities in peer processes. The second is
the nesting of peer processes within each other.
Step 1: Adding relevant activities for coordination
purposes. Each peer process P
s
i
includes activities
DYNAMIC DECENTRALIZED SERVICE ORCHESTRATIONS
41
of A
s
i
. Naturally, in order to be able to execute each
element a
i
of A
s
i
, P
s
i
must collect all of the input
data of a
i
. Moreover, all of the control dependent pre-
set activities of a
i
must be terminated. This implies
that P
s
i
must collect also control messages of the pre-
set activities of a
i
. Thus, in P
s
i
, each activity a
i
is
preceded by a number of activities that collect coor-
dination and data messages coming from other peer
processes that include preset activities of a
i
. When all
of the activities that collect messages related to a
i
are
executed, a
i
can be executed by P
s
i
. Peer processes
that send messages related to a
i
to P
s
i
can be exe-
cuted concurrently, however the synchronized recep-
tion of sent messages is required to execute a
i
. Due to
exclusive choice and merging situations (XOR-split
and XOR-join) all of the preset activities might not
be executed. Consequently, the exclusivity of preset
activities must be taken into account when they are
collected. The execution of a
i
by P
s
i
can produce an
outcome to be sent to other activities to be executed in
their proper peer processes. Moreover, control mes-
sages corresponding to the termination of a
i
must be
sent accordingly. As the reception of messages from
peer processes that execute preset activities, the send-
ing of coordination and data messages can be accom-
plished concurrently.
Example 2 (Step 1) Step 1 is applied separately for
each activity of the centralized specification. Let’s
take a
3
interacting with DS. The execution of a
3
re-
quires the termination of a
1
interacting with ES. Con-
sequently, P
DS
must receive a control message about
the termination of a
1
from P
ES
. The same activity has
an outgoing control dependency with a
5
interacting
with Ins. Thus, its execution must be followed by an
activity that sends a control message to P
Ins
. If we
take the second activity a
6
that interacts with DS, it
has two preset activities (a
2
, a
5
) interacting respec-
tively with Ins and H. Consequently, P
DS
must collect
the outcome of a
2
and a
5
from their corresponding
peer processes that are respectively P
H
and P
Ins
.
In addition to control and data edges that interconnect
activities, there can be also binding edges that charac-
terize binding dependencies and relevant binding ac-
tivities. As we mentioned earlier, collected coordina-
tion and data messages of a
i
contain also identities
of previously bound services. These information and
services identities bound following the execution of
a
i
must be propagated to interacted peer processes.
Consequently, P
s
i
updates the messages that it must
send to other peer processes respectively.
Example 3 (Step 1 bis) In our example, the activi-
ties a
1
and a
5
have a binding dependency which
means that P
ES
must bind a service Ins and deploy
P
Ins
. In the same time P
ES
must bind H, P and DS.
Algorithm 1 Adding relevant activities for coordination
purposes
Input: a
i
∈ A
Output:
a
i
1: AND-split
2: for all a
j
∈ •a
i
do
3: read(ser(a
j
), a
i
.coor) //concurrent reception of
coordination messages from peer processes that ex-
ecute preset activities
4: end for
5: AND-join
6: local(extract) //extraction of the input values of a
i
and
service identities from received coordination messages
7: a
i
//execution of regular activity
8: AND-split
9: for all a
j
∈ a(b) do
10: local(bind) // binding operations are executed
11: end for
12: AND-join
13: local(update) // coordination messages and peer
processes are updated with service identities collected
from other processes and bound by the current peer
process
14: AND-split
15: for all ser(a
j
) of a
j
∈ a(b) do
16: write(ser(a
j
), P
ser(a
j
)
) //peer process deployment
for bound services
17: end for
18: AND-join
19: AND-split
20: for all a
j
∈ a
i
• do
21: write(ser(a
j
), a
j
.coor) // concurrent sending of co-
ordination messages to peer processes that execute
postset activities
22: end for
23: AND-join
Furthermore, P
Ins
must interact with P
DS
. In order
to let P
Ins
to interact with P
DS
(it must send a data
message for the execution of a
6
in P
DS
), P
ES
must
include the identity of DS in the P
Ins
that it deploys.
This operation is accomplished as follows: When P
ES
is deployed to ES, it includes P
H
, P
DS
, P
P
, P
Ins
as
data elements. When P
ES
executes the service binding
operating, it must update peer processes with bound
service identities. This means that P
H
, P
P
and P
DS
must be updated with the identity of Ins while P
Ins
must be updated with DS’s identity. Consequently,
P
ES
must include relevant local activities that imple-
ment update operations after the binding operations.
Algorithm 1 describes the pseudo-code of the mech-
anism that consists of the first step of transformation.
We note the output of the algorithm that takes an ac-
tivity a
i
as input with ea
i
. Besides the iterations, each
instruction of the algorithm characterizes an activity
or a control connector that must be added to ea
i
. Step
1 operates on each activity of the initial process speci-
WEBIST 2007 - International Conference on Web Information Systems and Technologies
42
fication. It adds the relevant activities that ensures the
coordination of peer process that includes this activ-
ity with other peer processes that include control and
data dependent activities of the same activity. Coordi-
nation messages related to an activity a
i
are denoted
by a
i
.coor. They can include either process data or
light-weight coordination messages with bound ser-
vices identities. Moreover, following the outgoing
binding dependencies, they include also the identi-
ties of bound services. Locally executed activities let
peer processes manage the content of the coordination
messages exchanged with other peer processes.
Step 2: Structuring Correlated Activities and Iter-
ative Nesting. The operation of step 2 is to gather
correlated activities manipulated by step 1 within
their corresponding peer processes and to nest peer
processes within each other to support dynamic ser-
vice binding and peer process deployment. Both op-
erations are conducted together because when a peer
process is produced, the peer processes that it in-
cludes, must have been produced in previous itera-
tions. Consequently, the production of peer processes
is started from the ones that do not include activities
that have outgoing binding dependencies. This oper-
ation is followed by the processes that include pro-
duced peer processes.
The operation that gathers correlated activities is
expected to preserve the partial order between them
within their peer processes. Basically, two correlated
activities a
i
≻a
j
of the centralized specification must
preserve the same order ea
i
≻ ea
j
in their peer processes
after being transformed in step 1. If their partial or-
der is total, ea
i
must precede ea
j
. If a
i
and a
j
are
on concurrent paths, the concurrency of ea
i
and ea
j
must be preserved in the peer process that include
them. At this point, their exclusivity must be con-
sidered. This means that if ea
i
and ea
j
are exclusive
activities and only one of them is executed then their
peer process must structure them on exclusive paths.
Similarly, if they are expected to be concurrently exe-
cuted and synchronized before executing another cor-
related activity, they must be concurrently structured
within their peer processes.
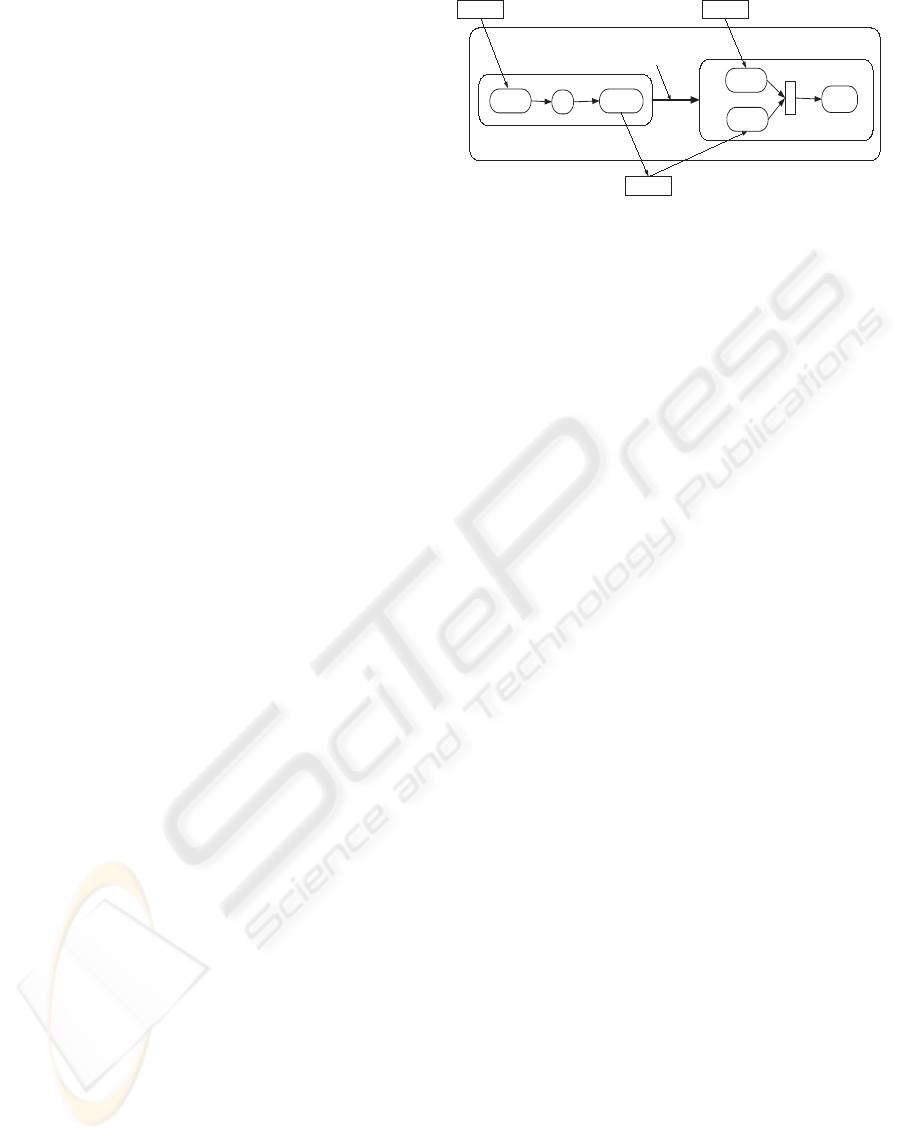
Example 4 (Step 2) Figure 3 depicts the structuring
of the correlated activities a
3
and a
6
that refer to DS.
As we mentioned in the previous example, step 1 pro-
duces ea
3
and ea
6
. When they are gathered in P
DS
, ea
3
and ea
6
must preserve the same order of a
3
and a
6
.
Consequently, step 2 puts ea
6
after ea
3
with a sequen-
tial dependency.
It should be noted that peer processes must be exe-
cutable processes that satisfy properties such as dead-
lock freeness, soundness etc. In order to do so,
P
DS
ã
6
ã
3
a
3
.coor
a
3
a
5
.coor
a
6
A
N
D
a
6
.coor
a
6
.coor
Sequential
structuring
P
Ins
P
ES
P
H
Figure 3: Structuring correlated activities in peer processes.
dummy activities and control connectors are added to
peer processes.
Algorithm 2 depicts the mechanism that operates
on the outcome of step 1. The operation starts with
peer processes that have no activities with outgoing
binding dependencies and iterates with ones that bind
the latter. We can identify a set P = (P , ≻) with P =
{P
s
0
, ,P
s
n
} being the set of peer processes. If there
are two processes P
s
i
and P
s
j
with P
s
j
≻ P
s
i
, this
means that s
i
is bound by P
s
j
and P
s
i
is deployed by
P
s
j
. Consequently, P
s
i
must be produced before P
s
j
.
In order to describe peer processes that have no out-
going binding dependencies, we use the set min(P).
Similarly, the partial order ≻ of centralized specifica-
tion is the same for the correlated activities of a ser-
vice s
i
included in A
s
i
. For both sets, the function
prec() returns the preceding element with respect to
the partial order. As correlated activities cannot be
always ordered, it is possible to have some subset of
activities that are incomparable. We note activities
that are incomparable by a set denoted as Inc
i
. All of
the activities of an incomparable set Inc
i
are included
in a common split and a join point in the centralized
process specification. In the peer processes, after be-
ing transformed with step 1, these activities must be
structured within common split and join connectors.
The common split and join points of the activities of
an Inc
i
are defined as below:
Definition 3 (Split-point) Let Inc
i
be a set of un-
ordered concurrent activities. A split-point of Inc
i
is the first backward control connector c such that its
preceding activity a
split
precedes all elements of Inc
i
.
More formally, ∀a
i
∈ Inc
i
, a
i
≻a
split
.
Definition 4 (Join-point) The joint point of Inc
i
is
the first forward control connector c such that its suc-
cessive activity a
join
follows all elements of Inc
i
.
More formally, ∀a
i
∈ Inc
i
, a
join
≻a
i
.
The type of split or join connectors is defined accord-
ing to activation conditions of the elements of Inc
i
.
For example, if there are two activities ea
i
and ea
j
that
are not activated because of their exclusivity, they are
DYNAMIC DECENTRALIZED SERVICE ORCHESTRATIONS
43
Algorithm 2 Structuring and nesting peer processes
Input: A
s
i
⊂ A //The algorithm is executed for correlated
activities modified with the step 1
Output: P
s
0
//The peer process to be executed by the ini-
tial service
1: P
s
i
← min(P) //initialization of peer processes with a
process that does not include any activity with outgoing
binding dependencies
2: a
i
← a
f
//initialization of the current activity with the
final activity of the produced process
3: for all P
s
i
∈ P do
4: for all
a
i
, a
i
∈ A
s
i
do
5: if ∃Inc
i
⊂ A, a
i
∈ Inc
i
/* if a
i
is a set of concur-
rent activities, split and join point detection pro-
cedures are started */ then
6: call
split
(Inc
i
)
7: call
join
(Inc
i
)
8:
a
i
← prec(a
i
) //the structuring is repeated
with preceding activities that are not in Inc
i
9: else
10: Sequence //If there is no Inc
i
that a
i
belongs
to, sequential structuring is considered
11: a
i
← prec(a
i
) //the structuring is repeated
with preceding activities
12: end if
13: end for
14: P
s
i
← prec(P
s
i
) //the operation is repeated for peer
processes that include produced processes
15: end for
split by an XOR-split. Similarly, if activities are pre-
cisely executed, they are structured after an AND-
split. Due to lack of space, we don’t give the full de-
tails of mechanism that identifies control connectors
of an Inc
i
. In the algorithm, we call the operation that
identifies the split and join points of concurrent corre-
lated activities with call
split
(Inc
i
)and call
join
(Inc
i
).
The structuring algorithm begins with peer processes
that do not deploy other peer processes(min(P)) and
continues with those that include them. When a
peer process is structured, the structuring operation
is started with the final activity and continues toward
the beginning.
5 ARCHITECTURAL
CONSIDERATIONS
The abstract concepts described in this paper are ap-
plicable to a variety of process modeling languages
and execution engines. However, it is important to
clarify some of the implementation details. In this
section, we present the current state of our implemen-
tation.
We use BPEL that characterizes the current state
of art in process modeling standardization efforts, as
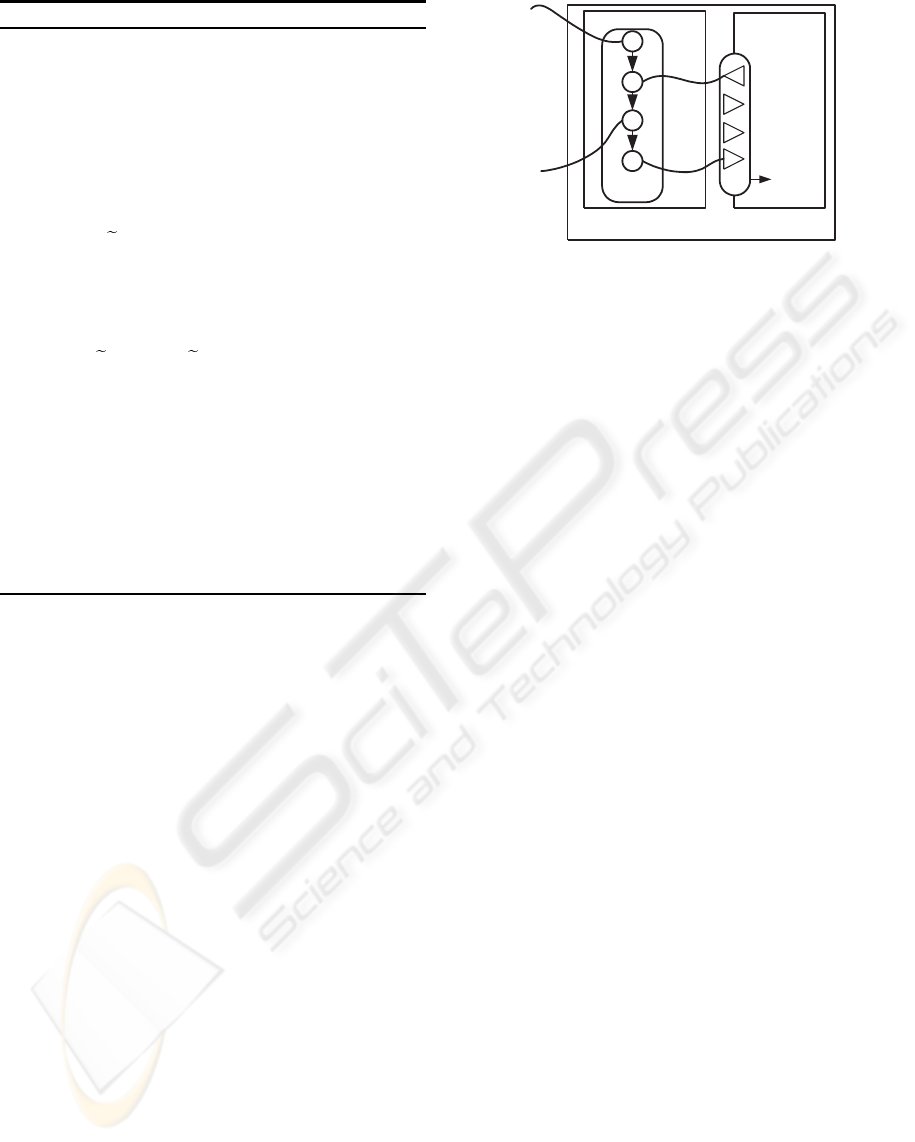
Container service
Service
Implementation
Execution Engine
Peer
Process
Service
Interface
Figure 4: Implementation overview.
process specification. In contrast to centralized exe-
cution settings, decentralized executions require ad-
ditional assumptions on composed services. As we
assume services to execute relevant peer processes,
the core services must be implemented inside ser-
vices that have process execution engines such as
BPWS4J(cf. Figure 4). The container services must
be invokable with peer processes. When they are
invoked with peer processes, they must also imple-
ment corresponding WSDL interfaces with corre-
sponding portTypes and partnerLinkTypes.
The basic method to support the dynamic service
binding can be supported with the reassignments of
partnerlinks. At this point, we assume a local
method that interacts with core service implementa-
tion reassigns required partnerlinks for dynamic ser-
vice binding purposes.
The essential operation of decentralization that
provides the nested peer processes is accomplished
on a single site which can be the first service where
the overall process starts. BPEL allows specifying a
process in different ways. Typically, there are two
essential ways, additionally a third style that com-
bines both can be considered. The first is the block-
oriented approach whereby there process is modeled
through nested use of structured activities (sequence,
flow, while, switch). The second is the explicit use
of link constructs that allow the expression of arbi-
trary precedences and related join/transition condi-
tions. We use block-oriented modeling that makes
the data and control dependence analysis of processes
easier. The core module that produces peer processes
is a Java application that uses XPath to analyze BPEL
specification. Xpath expressions query BPEL process
for control and data dependencies of basic activities
that consist of service interactions. Analyzed depen-
dencies are stored to define binding dependencies. We
prefer to not manipulate BPEL process that is ana-
lyzed as the concurrent analyze and manipulation of
tree structures have an important complexity.
WEBIST 2007 - International Conference on Web Information Systems and Technologies
44

6 RELATED WORK AND
CONCLUDING REMARKS
The idea of decentralized execution setting is not new.
Issues related to decentralized execution of workflows
has been considered as very important in the relevant
research literature a decade ago. If we consider pre-
vious works that are not relevant to service oriented
paradigms and technologies, much of them are con-
ceived to prevent the overloading of a central coordi-
nator component. Their basic proposition is to mi-
grate process instances from an overloaded coordi-
nator to a more available according to some metrics
(e.g. (Bauer et al., 2003)) or execute sub-partitions
of a centralized specification on distinct coordinators
(e.g. (Wodtke et al., 1997)). Although efficient, these
approaches do not consider P2P interactions of work-
flow elements.
The implementation of decentralization is rela-
tively new for service oriented applications. A simple
but crucial observation is that some of the recent ap-
proaches deal with decentralization by using central-
ized services or additional software layers what can
be a strong hypothesis in the Web context (Schuler
et al., 2005)(Benatallah et al., 2002) rather than rea-
soning decentralization with decentralized processes.
In contrast to the latter, the unique assumption of our
approach for orchestrated services is the capability of
executing processes. This is a reasonable assumption
in the context of modern virtual organizations that al-
ready implement internally their published interfaces
as processes.
(Nanda et al., 2004) proposes a process parti-
tioning technique similar to ours. However, the dy-
namic service binding and conversations are not con-
sidered. The authors focus on the partitioning of vari-
able assignment activities of a BPEL processes. The
works presented in (Maurino and Modafferi, 2005)
and (Sadiq et al., 2006) are similar.
This paper has taken on the challenge of design-
ing a technique for translating a centralized orches-
tration specification to a set of dynamically deploy-
able peer processes. The proposed approach aims
to allow orchestrated services to have P2P interac-
tions through the peer processes that they execute.
When coupled with an efficient process transforma-
tion technique, we believe that the common process
representation brought forward by standards can deal
with architectural concerns of decentralized execution
settings without making unreasonable assumptions
about composed services. Our contribution stands
between Orchestration and Choreography initiatives
that govern the implementation of service oriented ap-
plications. We demonstrated how an orchestration de-
scription can be effective with a decentralized execu-
tion as analogous to choreography that requires much
more sophisticated design and run-time reasoning.
REFERENCES
Alonso, G., Kamath, M., Agrawal, D., Abbadi, A. E., Gun-
thor, R., and Mohan, C. (1995). Exotica/ fmqm: A
persistent messagebased architecture for distributed
workflow management. In IFIP Working Confer-
ence on Information System Development for Decen-
tralised Organisations, Trondheim.
Bauer, T., Reichert, M., and Dadam, P. (2003). Intra-subnet
load balancing in distributed workflow management
systems. Int. J. Cooperative Inf. Syst., 12(3):295–324.
Benatallah, B., Sheng, Q. Z., Ngu, A. H. H., and Dumas, M.
(2002). Declarative composition and peer-to-peer pro-
visioning of dynamic web services. In ICDE, pages
297–308.
Chen, Q. and Hsu, M. (2001). Inter-enterprise collaborative
business process management. In Proceedings of the
17th International Conference on Data Engineering,
ICDE, pages 253–260.
IBM, BEA Systems, Microsoft, SAP AG, and
Siebel Systems (2005). Business Process
Execution Language for Web Services, ver-
sion 1.1 (updated 01 feb 2005). http://www-
128.ibm.com/developerworks/library/specification/ws-
bpel/.
Leymann, F. and Roller, D. (2000). Production Workflow -
Concepts and Techniques. PTR Prentice Hall.
Maurino, A. and Modafferi, S. (2005). Partitioning rules for
orchestrating mobile information systems. Personal
and Ubiquitous Computing, 9(5):291–300.
Nanda, M. G., Chandra, S., and Sarkar, V. (2004). De-
centralizing execution of composite web services. In
OOPSLA, pages 170–187.
Sadiq, W., Sadiq, S., and Schulz, K. (2006). Model driven
distribution of collaborative business processes. In
IEEE International Conference on Services Comput-
ing, SCC.
Schuler, C., Turker, C., Schek, H.-J., Weber, R., and
Schuldt, H. (2005). Peer-to-peer execution of (trans-
actional) processes. International Journal of Cooper-
ative Information Systems, 14(4):377–405.
van der Aalst, W. M. P., ter Hofstede, A. H. M., Kie-
puszewski, B., and Barros, A. P. (2003). Work-
flow patterns. Distributed and Parallel Databases,
14(1):5–51.
Weerawarana, S., Curbera, P., Leymann, F., Storey, T., and
Ferguson:, D. (2005). Web Services Platform Archi-
tecture. Prentice Hall PTR.
Wodtke, D., Weißenfels, J., Weikum, G., Dittrich, A. K.,
and Muth, P. (1997). The mentor workbench for
enterprise-wide workflow management. In SIGMOD
Conference, pages 576–579.
DYNAMIC DECENTRALIZED SERVICE ORCHESTRATIONS
45
