
Experiences with the TinyOS Communication Library
⋆
Paolo Corsini, Paolo Masci and Alessio Vecchio
Dipartimento di Ingegneria della Informazione
Universit
`
a di Pisa
56122 Pisa, Italy
Abstract. TinyOS is a useful resource for developers of sensor networks. The
operating system includes ready-made software components that enable rapid
generation of complex softwarearchitectures.Inthispaper we describe the lessons
gained from programming with the TinyOS communication library. In particular,
we try to rationalize existing functionalities, and we present our solutions in the
form of a communication library, called TComm-Lib.
1 Introduction
A sensor network is a wireless network of communicating nodes. Each node consists
of an embedded micro-controller with a small amount of memory, a battery, a wireless
transceiver, and may be equipped with various sensing hardware (light, temperature,
etc.). The network is self-organizing and multi-hop communication is used to transport
data collected by nodes to a monitoring base station.
Hardware resources of the nodes are extremely limited because of a set of con-
straints: i) the cost of the nodes must be kept as low as possible since the number of
nodes can be in the order of hundreds or even thousands elements, ii) they must be
energy efficient since the replacement of batteries is often unfeasible or expensive, iii)
their size must be kept small in order to be ubiquitous. For instance, nodes based on
the Telos-B platform are equipped with 48KBytes of instruction memory, 10KBytes of
RAM and the current draw in active and sleep mode is respectively 1.8mA and 5.1µA.
Programming in such environment is not an easy task, not only because of the hard-
ware limitations, but also because developers of applications for sensor networks belong
to different technical areas, from telecommunications to electronics and computer sci-
ence. Fortunately, they do not have to write their own applications with assembly-like
languages, but can leverage on high-level languages and libraries providing basic ser-
vices. The standard platform for sensor networks is TinyOS [1], available for a number
of different hardware architectures, and nesC [2] is the used programming language.
In this paper, we report our experience on developing applications for sensor net-
works, focusing on the communication services provided by TinyOS. Besides highlight-
ing the positive and negative features of the library, we describe the issues encountered,
and provide the adopted solutions in the form of a communication library, TComm-Lib.
⋆
This work is partially supported by Fondazione Cassa di Risparmio di Pisa, Italy (SensorNet
Project).
Corsini P., Masci P. and Vecchio A. (2006).
Experiences with the TinyOS Communication Library.
In Proceedings of the 5th International Workshop on Wireless Information Systems, pages 47-55
Copyright
c
SciTePress

TComm-Lib is not aimed at introducing new network services, instead it tries to ra-
tionalize existing functionalities in order to give a simple user experience for effective
programming with sensor networks. TComm-Lib has been built, almost completely, by
simplifying, re-organizing, and extending the original TinyOS library.
2 TinyOS and nesC
TinyOS is an open-source operating system designed for wireless sensor networks. Ar-
chitecture and implementation of TinyOS applications are component-based, enabling
rapid innovation and modularity. The libraries shipped with the operating system in-
clude a number of ready-made components that can be connected together with user-
defined components.
Applications that run on the TinyOS platform, as well as TinyOS itself, are written
with nesC [2], a component-oriented extension of the C programming language. With
nesC, programmers can define new components using a C-like syntax, and connect
them together in order to create new components or applications (the act of connecting
is called “wiring”). Each component declares input and output functions, called com-
mands and events, that are used in the wiring process. Commands and events are usually
grouped into interfaces, i.e. labeled sets with a given type.
A component can offer multiple instances of the same interface. Each interface can
be connected to different components, and a specific interface is selected through the
use of an index. In this case the interface is said to be parametric.
2.1 The TinyOS Communication Library
The TinyOS communication library supports single and multi hop communication with
other nodes (via the wireless transceiver), and serial communication between a sensor
node and the base station (via USB or serial port).
Since our paper focuses on the communication library of TinyOS, in the following
we describe GenericComm, the component used for communication.
GenericComm implements single hop and serial line communication (the last fea-
ture is used only by the node connected to the base station). Moreover, it provides i) a
control interface (StdControl) to initialize, start and stop the component, ii) a para-
metric interface for sending packets (SendMsg[uint8
t id]
1
), iii) a parametric
interface for receiving packets (ReceiveMsg[uint8 t id]). The implementation
of GenericComm is specified in the following file (some details are not shown):
configuration GenericComm{
provides{
interface StdControl;
interface SendMsg[uint8_t id];
interface ReceiveMsg[uint8_t id];
}
1
This notation means that 256 instances of the SendMsg interface are available (uint8
t is an
unsigned int type coded on 8 bits).

}
implementation{...}
Let us now examine the interfaces for sending and receiving packets of Generic-
Comm. The SendMsg interface declares one command and one event:
interface SendMsg{
command result_t send(uint16_t address,
uint8_t length,
TOS_Msg
*
msg_ptr);
event result_t sendDone(TOS_Msg
*
msg_ptr,
result_t success);
}
The send() command has three parameters: the destination address, the length (in
bytes) of the payload, and a pointer to the buffer containing the message to be sent. The
command is non-blocking. The sendDone() event is signaled when the message is
actually transmitted. The event has two parameters: a pointer to the buffer containing
the last message sent, and a flag reporting the success or failure of the sending attempt.
Communication over the serial connection is achieved by using a special and re-
served address (codified as UART ADDR).
The ReceiveMsg interface declares only one event:
interface ReceiveMsg{
event TOS_Msg
*
receive(TOS_Msg
*
msg_ptr);
}
The receive() event is signaled every time a message is successfully received
over the radio or over the serial port. The event has one parameter, that is a pointer to the
buffer containing the received message. The event must return to the caller the buffer
for the next receive operation (a buffer-swap mechanism is used to avoid the overhead
of copying data).
3 Developing Network Applications
3.1 Features and Limits
In this section, we report our experience on using the TinyOS communication library
and explore how unexpected behavior may arise for a number of factors.
Selective Powering of Communication Hardware. Hardware devices are represented
by software components. By calling the start()command of a software component,
the corresponding hardware device is powered on. Similarly, by calling the stop()
command a hardware device can be powered off. In some cases, a single software com-
ponent represents several hardware devices. For example, GenericComm is associated
with both the radio chip and the controller of the serial interface. Nevertheless, if no
dedicated control interface is exported, then selective powering on/off is unfeasible. In

fact, the start()command turns on all the hardware associated with a software com-
ponent, even if only one of the devices is actually needed. Thus, when the start()
command of GenericComm is called, for instance because the application is going to
communicate over the wireless channel, the radio is powered-up, but at the same time
the serial controller is automatically powered-up too.
Management of the Duty Cycle. In many cases, the application running on the nodes
of a sensor network is cyclical: the environment is sensed, acquired information is trans-
mitted, then the application sleeps for a given amount of time before restarting the cycle.
Usually, the sleep time is longer than the active time by several orders of magnitude,
therefore it is of primary importance to reduce the amount of energy consumed dur-
ing the sleep time. Power management can be done at the application level by using
the start() and stop() commands. Nevertheless, hardware devices may present a slow
power-up phase with respect to the clock of the microcontroller (e.g. because the volt-
age regulator of the device needs a certain time to stabilize), and trying to use a com-
ponent during the transition phase may cause unpredictable behavior. In other words,
applications need a view on the power status of hardware devices, but the StdControl
interface does not suit properly to this purpose (the start() and stop() commands
return immediately and do not wait for a complete power-on, or power-off, of the de-
vice). In the context of the communication library, this problem arises because the radio
chip device has a slow power-up phase, but GenericComm provides no interface to
expose the transition process.
Controlling the Transmission Power. The radio installed on the sensor nodes has a
transmission range that is approximately one hundred meters, if used with maximum
power. However, in some scenarios, it can be useful to manually reduce the transmission
power: for example, if the network is particularly dense, by reducing the transmission
range it is possible both to save energy and decrease the number of packet collisions.
Also, during the debugging phase of a network protocol or an application, the reduction
of the transmission range can help to set up a multi hop testbed. The TinyOS library
includes software components for radio range setup, but they are usually hidden inside
complex configurations that do not expose an interface to access such functionality.
Power Saving Modes. TinyOS automatically switches the microcontroller to a low-
power mode whenever possible, thus extending the life-time of nodes even when the
application does not explicitly take care of it. For example, the TMote sky nodes [3]
automatically go into sleep mode when all the following conditions are satisfied: i) the
radio is turned off, ii) all high speed clock outputs are disabled, iii) the serial peripheral
bus is idle, iv) the task queue is empty. Nevertheless, automatic transition to the sleep
mode is disabled by default on almost all platforms. Hence, the programmer has to
explicitly include the activation of the power saving subsystem into the application
code.

3.2 Related Work and Motivations
The TinyOS community is making a big effort to improve and expand the APIs of the
whole TinyOS library. In particular, recent works are proposing solutions to promote a
standard framework across different platforms. In [4] the authors discuss design patterns
useful to solve common problems, and aimed to the development of efficient and robust
program structures. In [5] an abstraction layer is presented in order to standardize the
interfaces of nesC components across different platforms. Both these works reflect the
philosophy of the TinyOS Enhancement Proposals (TEPs), basis of TinyOS 2.0. Notice
that sometimes radical changes are required in order to actuate such proposals. In fact,
applications written for TinyOS 2.0 are not backward-compatible with the previous
platform.
Further research work related to the programming paradigms provided by TinyOS
is described in [6], where the authors summarize and analyze the experience of the
TinyOS community in creating software abstractions for the communication layer.
The motivations of our work rely on finding solutions that balance between new
programming trends of TinyOS 2.0 and the semantic structure of old-style applications
for sensor nodes. In particular, the revisions we propose are backwards compatible, and
enable developers to improve existing programs without actually re-engineering the
entire application.
4 TComm-Lib Solutions
Most of the ideas behind TComm-Lib are the result of our previous research experi-
ence in the context of sensor network. In particular, during the implementation of a
monitoring application, we encountered all the issues previously described.
In the following subsections we show how simple revisions of the TinyOS commu-
nication library may help application developers to gain control over specific resources
and produce modular architecture for effective code.
4.1 Selective Powering of Communication Hardware
As previously introduced, GenericComm implements communication over the serial
line and over wireless channels. We split GenericComm into two components, on
the basis of the offered function: RfmComm dedicated to wireless transmissions, and
UsbComm used for communication over the serial line.
RfmComm preserves the core interfaces of GenericComm, i.e. SendMsg and
ReceiveMsg. Thus, the component of the TinyOS library can be replaced with the
new component with minor changes to the application code. Besides the interfaces for
sending and receiving packets, RfmComm includes also SplitControl, which re-
places StdControl and is used to safely turn on and off the component, and RFPo-
wer, which adjusts the transmission power. These interfaces are described in Section
4.2 and 4.3.
configuration RfmComm{
provides{

interface SplitControl;
interface SendMsg[uint8_t id];
interface ReceiveMsg[uint8_t id];
interface RFPower;
}
}
implementation{....}
UsbComm provides the same interfaces of RfmComm, except for RFPower:
configuration UsbComm{
provides{
interface SplitControl;
interface SendMsg[uint8_t id];
interface ReceiveMsg[uint8_t id];
}
}
implementation{....}
RfmComm and UsbComm offer a clear vision of the hardware devices actually in-
volved and they can be used by developers depending on the needed functionality.
Moreover, as a nice side-effect, there is no need to reserve the UART
ADDR address
for the serial line.
4.2 Management of the Duty Cycle
Events signaling the progress of the power-up phase can be found within a specific
TinyOS control interface, SplitControl. The SplitControl interface is pro-
vided with the start() and stop() commands of the StdControl interface, but
it also offers the events startDone() and stopDone(), used to signal the comple-
tion of the corresponding command:
interface SplitControl{
command result_t init();
command result_t start();
command result_t stop();
event result_t initDone();
event result_t startDone();
event result_t stopDone();
}
Within TComm-Lib, both RfmComm and UsbComm support the SplitControl
interface. As a consequence, the components can be appropriately turned on and off,
even if they are associated with hardware devices with a slow power-up phase.
4.3 Controlling the Transmission Power
The power used for wireless transmission can be controlled through interfaces that
change on the basis of the used radio chip. For example, the mica and mica2 platforms

use the CC1000 radio, thus the CC1000Control interface must be used, while the
micaZ and Telos-B platforms are equipped with the ZigBee-compliant CC2420 radio
chip, and the CC2420Control interface must be used.
Different control interfaces show common commands but generally they are not
compatible, since different radio chips have different available functions. Moreover,
these interfaces include a number of commands that are actually rarely used by other
components.
We decided to simplify the interface and to expose only the command to control
the transmission range. The new interface is called RFPower and it has only one com-
mand, SetRFPower(uint8
t power), that is platform-independent. The power
parameter specifies the radio range (0 is the shortest, 31 is the longest).
interface RFPower{
command result_t SetRFPower(uint8_t power);
}
Within TComm-Lib, the RFPower interface is provided by the RfmComm compo-
nent.
4.4 Power Saving Modes
The automatic sleep mode of the microcontroller of the sensor nodes can be activated
by calling the enable() command of a low-level software component (HPLPower-
ManagementM).
We transparently changed the default setting of the automatic power-saving sub-
system by extending the Main component of the TinyOS library: when the init()
command is called to initialize the application, the power management module is acti-
vated. The new component, called LpMain, can be transparently incorporated within
existing applications since the interfaces are unchanged.
5 The Importance of Power Management
Energy is the most valuable resource of sensor nodes. Several research studies propose
architectures to optimize energy consumption, where effective solutions are strictly
connected to specific application scenarios. However, besides the benefits achievable
through architectural solutions, experience highlights the importance of low-level im-
plementation and precise access to hardware resources.
In fact, controlling the power status of hardware devices is a simple, yet effective,
energy saving solution that can be adopted by any software layer. Besides duty cycle
optimizations included inside low-level software components, the whole application for
sensor nodes may also present high level components that can be toggled on and off.
Let us imagine a scenario where a sensor network is used to monitor the level of light
inside a building. The application periodically samples the light and sends a message to
the sink node. Each message contains the ID of the sender node and the corresponding
sampled value. Let us also assume that single hop communication is used for wireless
transmission. This application is characterized by an active period where the application
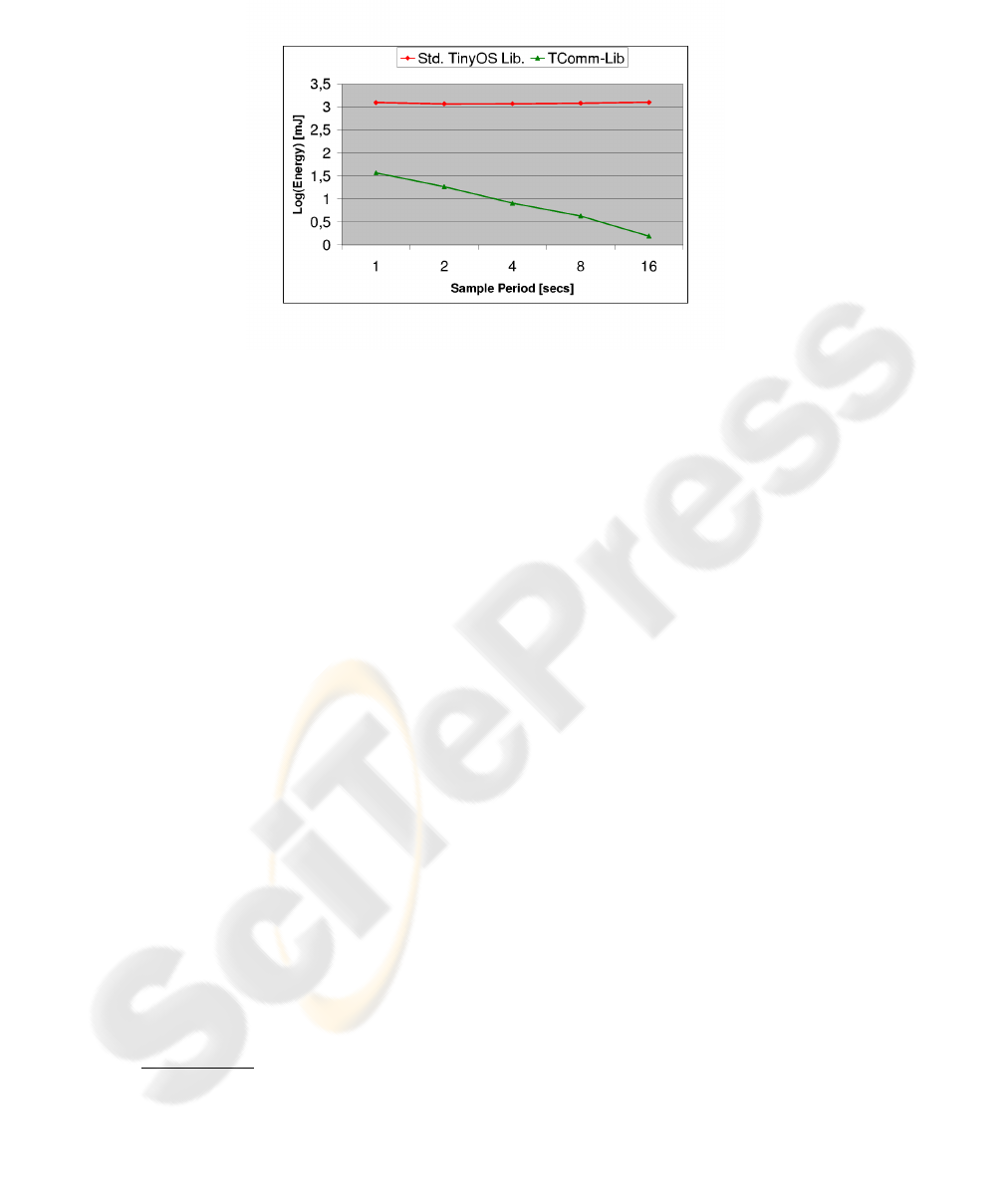
Fig.1. Energy consumption varying the period of operation.
performs data acquisition and communication and an inactive period where the node is
idle. This periodical model of operation is representative of a wide class of applications
for sensor networks.
During the inactive period the node must enter the low power state, in order to save
as much energy as possible. The amount of energy that can be saved by entering the
low power state can be relevant, especially when the inactive period becomes longer.
Figure 1 shows the difference, in terms of energy consumption, of two versions of
the application
2
: the first one uses TComm-Lib to enter the low power state as soon
as possible (i.e., immediately after the transmission of a packet), the second one does
not take care of driving the components used by the application into the low power
state. As expected, when the period of operation of the application becomes longer, the
difference becomes even more relevant.
From the programmer’s perspective, power management can be easily done by us-
ing the TComm-Lib revised components and interfaces: the RfmComm component can
be safely switched on/off as required, since it provides a feedback of its state to the
application, and the UsbComm component is left turned off and will never be activated
since not needed. Power management is more troublesome if using the standard TinyOS
communication library. For example, the USB subsystem cannot be switched off, as it
is hidden within GenericComm. Also, safely switching the radio on and off requires
an additional programming effort to avoid using the radio equipment when it is still in
an inconsistent state.
For testing purposes, we included these mechanisms also within the application im-
plemented with the standard TinyOS communication library. We observed that within
the simulation environment everything worked fine and obtained the same power con-
sumption of TComm-Lib. Nevertheless, after installing this modified version on real
2
We used PowerTOSSIM [7] to estimate the energy consumption.

nodes, we experienced that nodes were not able to transmit any message at all, and
sometimes they crashed. We attributed these malfunctions to the incomplete power-up
phase of the radio (these problems are not visible in the simulated environment).
This problem can be avoided, for example, by introducing a delay between the ac-
tivation of the radio subsystem and its usage. However, this requires the programmer
to know the length of the transition phase of the radio component from the low power
state to the operational state, that can be different on the basis of the hardware platform.
6 Conclusions
Creating software abstractions suitable for sensor networks is challenging since the sen-
sor nodes require software architectures radically different from traditional networking
systems.
As known, the application logic is central for defining an effective strategy for en-
ergy saving. To make these strategies real, applications need the cooperation of the un-
derlying layers, which must expose mechanisms for power management. As described
in [8], the strategies adopted by applications are in many cases based on few and recur-
ring principles, for this reason the underlying layers can offer abstractions that appear
to be general and reusable.
In this paper we have described our experience on developing applications for sen-
sor networks, focusing on the abstractions provided by the TinyOS communication li-
brary. On the basis of the lessons learned we rationalized and re-organized the original
communication library, not only to provide cleaner programming abstractions, but also
to generate more energy efficient code.
References
1. TinyOS: (http://webs.cs.berkeley.edu/tos/)
2. Gay, D., Levis, P., von Behren, R., Welsh, M., Brewer, E., Culler, D.: The nesC language: a
holistic approach to networked embedded systems. SIGPLAN Not. 38 (2003) 1–11
3. Moteiv Inc.: (http://www.moteiv.com)
4. Gay, D., Levis, P., Culler, D.: Software Design Patterns for TinyOS. Proceedings of the ACM
SIGPLAN/SIGBED 2005 Conference on Languages, Compilers, and Tools for Embedded
Systems (LCTES’05), Chicago (2005)
5. Handziski, V., Polastre, J., Hauer, J., Sharp, C., Wolisz, A., Culler, D.: Flexible Hardware
Abstraction for Wireless Sensor Networks. Proceedings of the Second European Workshop
on Wireless Sensor Networks (EWSN ’05), (2005)
6. Levis, P., Madden, S., Gay, D., Polastre, J., Szewczyk, R., Woo, A., Brewer, E., Culler, D.:
The Emergence of Networking Abstractions and Techniques in TinyOS. Proceedings of the 1st
USENIX/ACM Symposium on Networked Systems Design and Implementation (NSDI2004)
(2004)
7. Shnayder, V., Hempstead, M., Chen, B., Welsh, M.: PowerTOSSIM: efficient power simula-
tion for tinyos applications. Proceedings of ACM SenSys 2003 (2003)
8. Levis, P., Hill, J., Buonadonna, P., Szewczyk, R., Woo, A.: A Network-Centric Approach to
Embedded Software for Tiny Devices. Lecture Notes in Computer Science (2001)
