
EMERGENCY INFORMATION DISSEMINATION IN MOBILE
NETWORKS FOR VEHICLES
Ioan Chisalita and Nahid Shahmehri
Department of Computer Science, Linköping University, SE-581 83, Linköping, Sweden
Keywords: Safety vehicular communication, reactive protocol, safety information, vehicular networks.
Abstract: Due to the unacceptably high number of accidents with severe consequences, in-vehicle safety systems that
provide a better service to drivers are needed. One of the key technologies for supporting the development
of efficient safety systems is vehicular communication. In this paper we propose a reactive protocol for
disseminating emergency notifications to vehicles in traffic. The communication performance and the
protocol usefulness for help avoiding accidents are investigated via computer simulations. The results of the
evaluation indicate that timely and reliable communication can be provided by the proposed protocol.
1 INTRODUCTION
Every year, more than one million people die
worldwide on the roads (Evans, 2004). In addition,
the financial impact of traffic accidents is enormous:
for example, in 2003 the total of accident-related
losses reported in the U.S. was more than $230
billion (Biswas, Tatchikou & Dion, 2006). For
improving traffic safety, extensive investigations
into the causes of accidents and crash
countermeasures have been conducted over the
course of the last decade (Bishop, 2000). Many of
these studies have identified driver error as the
major cause of crashes (i.e. 90 %). Consequently, a
great deal of effort has been directed towards
helping drivers and reducing operator error. On-
board safety systems are considered to have a great
potential for reducing the number of accidents, e.g.
reductions with up to 70 % were predicted for
specific crashes (DOT, 2003).
Safety systems that make use of data wirelessly
exchanged between vehicles are able to efficiently
act towards avoiding collisions (Miller & Huang,
2002). These systems extend the perception of
vehicles in comparison to safety systems based only
on sensors such as radar. They are also capable to
cope with complex traffic situations. However, the
development of a communication system that
provides support to in-vehicle safety systems pose
difficulties due to the specifics of the environment in
which the exchange of data takes place. In the traffic
environment, the vehicles can constantly change
their position, heading and velocity. They also join
and exit the traffic in a relatively random manner,
and can rapidly pass through zones with very
different transmission patterns. In addition, the
development of traffic safety applications requires
communication systems that can assure low latency
and high reliability (Biswas, Tatchikou & Dion, 2006).
Considering the above aspects, the
dissemination of safety information was considered
to benefit from the use of direct communication
between vehicles that form an ad-hoc network
(Chisalita & Shahmehri, 2006). This type of
communication implies that no servers are involved
in controlling the exchange of data, and the network
is organized and maintained by vehicles alone. In
this paper we consider the above approach, and
propose a reactive protocol for effectively distribute
notifications about dangerous situations that occur in
traffic.
The rest of the paper is organized as follows.
Section II presents related work. Section III provides
an overview of the proposed protocol. Section IV
presents details on the reactive operation of this
protocol. Section V presents an evaluation of the
protocol. Finally, section VI summarizes the paper
and presents future directions.
2 RELATED WORK
Work in vehicular communication has been mostly
focused on three aspects: network management,
medium access, and communication protocols. The
284
Chisalita I. and Shahmehri N. (2006).
EMERGENCY INFORMATION DISSEMINATION IN MOBILE NETWORKS FOR VEHICLES.
In Proceedings of the International Conference on Wireless Information Networks and Systems, pages 284-289
Copyright
c
SciTePress

work presented in this paper relates to the last
aspect, and we survey below related contributions.
Various routing protocols have been proposed
for distributing data in mobile ad-hoc networks
(Royer & Toh, 1999). However, since these
protocols require the sender to know the identities of
the receivers, their applicability to safety vehicular
communication is limited (Biswas, Tatchikou & Dion,
2006). Also, the establishment of routes from sender
to destination(s), and their maintenance, is time and
bandwidth consuming. Consequently, most of the
protocols proposed for routing in ad-hoc networks
do not map well for safety vehicular communication.
Several specific protocols have been proposed
for dissemination of data between vehicles. These
protocols can be classified as reactive or proactive.
Reactive protocols employ the sending of
notifications to warn oncoming vehicles. Proactive
protocols provide traffic data in a regular manner. In
this case, the vehicles have a constant and up-to-date
view of the traffic. Using proactive protocols, safety
systems can have early information and are able to
predict well in advance the possibility for an
accident to occur. Consequently, they can efficiently
act towards eliminating it. In comparison, safety
systems supported by reactive protocols can only
limit the consequences of dangerous situations that
have already occurred. However, there are situations
in traffic that require the sending of notifications, or
in which the vehicles can benefit by having explicit
notifications about road hazards.
Several communication protocols for
distributing notifications to vehicles have been
previously proposed. Briesemeister (2001)
introduced a protocol for implementing a warning
system for traffic jams. This protocol employs a
method of estimating the size of the traffic jam for
controlling the distribution of messages. However,
this solution cannot be generalized for supporting
other traffic applications. Yang et al. (2004)
proposed a protocol for distributing warning
messages that use an analytic approach for adapting
the transmission rate. Nevertheless, this proposal
applies only for notifications about rear-end
accidents. A broadcast protocol that performs
relaying of notifications based on an estimation of
the transmission area covered by nearby vehicles
was proposed in (Sun at al., 2000). However,
Briesemeister (2001) demonstrated that the technique
can be unreliable.
We propose a protocol that is both proactive
and reactive. The proactive operation allows an
efficient organization of the vehicular network, and
delivers data used by in-vehicle safety systems to
identify hazards in traffic (Chisalita & Shahmehri,
2006). The reactive operation considers the specific
organization of the network when distributing
emergency data in traffic. We note that even when
using reactive protocols, the vehicles usually still
need to regularly exchange some identification data
in order to be able to organize the network. We have
extended the use of this data for realizing the
proactive component of the protocol. In previous
work we report on the network organization and the
proactive operation (Chisalita, 2006). In this paper
we focus on the reactive operation of the protocol.
Our work in the context of the DSRC standard
(ASTM, 2003) is discussed below. DSRC (Dedicated
Short Range Communication) was initially proposed
for vehicle-to-road communication and recently
extended for vehicle-to-vehicle communication. The
standard specifies the MAC layer, the link layer and
the radio layer for vehicular communication
systems. However, DSRC do not address multihop
communication and network organization. We
propose techniques for managing the vehicular
network, and for forwarding information. Our work
is complementary to DSRC. The protocol we
propose can also be implemented using DSRC
radios and channels, and can be used for augmenting
DSRC functionality when providing safety services.
3 SAFETY VEHICULAR
COMMUNICATION
OVERVIEW
In safety vehicular communication, traffic data
needs to be transferred in a timely manner between
vehicles that may not know about each other.
Reactive protocols should also aim to deliver
notifications to as many hosts as possible, which
may require data transmission in large areas.
However, the receiving hosts should be enabled with
filtering capabilities as they may not be interested in
all the received messages. Considering these
requirements, we controlled the delivery of safety
information by two methods.
First, we define a method for organizing the
vehicles. Vehicular network organization is essential
for obtaining scalable and reliable communication.
Therefore, we propose the grouping of vehicles in
manageable clusters that are defined based on the
current interest in traffic of the vehicles. Each
vehicle creates and maintains its virtual cluster,
which is defined as a local network (Chisalita,
2006). An example is presented in Figure 1. The
data needed for performing the network
organization is provided via the proactive operation
EMERGENCY INFORMATION DISSEMINATION IN MOBILE NETWORKS FOR VEHICLES
285

of a dedicated communication protocol (Chisalita &
Shahmehri, 2006). Thus, if data provided by a
vehicle is considered useful, the receiver registers
this vehicle in its local network. Further on, if the
information about the sender is not updated within a
time interval, the sender is removed from the local
network.
Figure 1: Example of local networks.
The determination of the level of interest is
performed using a set of traffic-related rules. The
criteria used for defining these rules were:
• Vehicle position. This data is needed by in-
vehicle safety systems for identifying dangerous
situations, e.g. (Sun et al., 2000).
• Service area extent. Research in traffic safety
has indicated that vehicles in proximity usually
have important data (e.g. vehicles situated
within 300-500 m), e.g. (Yang et al., 2004).
• Local network composition. Traffic analyses
have indicated that the number of vehicles that
can provide useful data is limited (e.g. 15-20)
(Asher & Galler, 1996).
• Parameters of the driving situation, e.g. relative
distance between vehicles, relative heading,
road status, vehicle status, road type. Accident
reports indicated that these parameters are
strongly related to crashes (DOT, 2003).
The size of a local network was denoted as Service
Area Threshold (SAT) and was initially set to 300 m.
The maximum number of hosts in a local network
was denoted as MNH, and was set to 20. The
suitability of these values (i.e. for SAT and MNH)
was then validated via simulations (Chisalita, 2006).
Further on, we propose an anonymous context-
based protocol for delivering safety data among
vehicles. This protocol is a scoped broadcast where
the identities of the destinations are not known by
default. Therefore, the vehicles are required to
analyze the received messages in order to determine
if they are the intended destination. The data used in
proactive operations is encapsulated in Basic Safety
Messages (BSMs) that are regularly sent at short
intervals. These messages contain data needed by
on-board safety systems for assessing hazards in
traffic. Examples are position, velocity, heading and
status of vehicles, and data about the road type and
status. Data included in BSMs is also used for
determining the level of interest for senders, and for
organizing the vehicular network. Filtering and
forwarding of BSMs are performed using a set of
traffic-related rules that make use of contextual
information (Chisalita & Shahmehri, 2006).
Data about hazards that occur in traffic is
encapsulated in Warning Messages (WAMs). These
messages are issued when an in-vehicle safety
system detects a hazard in traffic and considers that
other vehicles should be announced about it. The
safety system should also specify the transmission
and digest of WAMs, e.g. sending frequency and
time validity. In our work we have mostly focused
on supporting the efficient distribution of
notifications rather than providing specific
techniques for disseminating WAMs in particular
traffic situations. Thus, we propose a general
mechanism for issuing notifications that can be
further specified for diverse safety applications.
Warning messages can be disseminated in an area
specified by a local network, or in larger areas.
These messages are by default accepted by vehicles.
However, we also provide means for defining the
conditions that need to be fulfilled for warning
messages to be accepted.
4 WARNING MESSAGES
DISTRIBUTION
We introduce in the followings the techniques that
we have proposed for generating and forwarding
warning messages.
4.1 WAMs Generation and Content
Warning messages are generated when dangerous
events occur in traffic. A WAM is generated when a
safety system detects a hazard that can pose dangers
to other vehicles. The message can then be issued a
number of times in order to increase the probability
of being received by other vehicles. If the danger
persists, other WAMs can be generated.
As previously mentioned, a received warning
message is usually accepted by a vehicle. However,
the protocol can be configured so that the receivers
perform filtering of WAMs. For this, two options
were included within WAMs. The first addresses the
acceptance of notifications issued by hosts from the
same local network. Thus, it is possible to issue
WAMs that should be received only if the sender is
part of the receiver’s local network. For
implementing this option, we provided a field
default acceptance in WAMs. The second option
refers to the emergency degree of the traffic
situation that required the WAM to be sent. Thus,
Local Networks
WINSYS 2006 - INTERNATIONAL CONFERENCE ON WIRELESS INFORMATION NETWORKS AND SYSTEMS
286

WAMs contain indications of the criticality of the
situation. We use this term to indicate how
dangerous a traffic situation is at a certain moment
in time. Two parameters are used to describe
dangerous traffic situations: criticality type and
criticality level. The criticality type provides a high-
level description of the situation. The criticality level
is a parameter that provides the possibility to set a
numeric value for indicating the level of emergency
associated with a dangerous situation. The criticality
level and type can be used for deciding if a WAM
should be accepted or not.
The WAMs structure is presented in Table 1.
Each warning message contains the sender identity
and the moment when the message was sent. These
two fields uniquely identify the transmitted message.
WAMs also contain the position of the dangerous
situation or event, and a short description of it. Other
types of information included in WAMs are the
criticality type and level, a retransmission counter,
and the default acceptance indication. Additional
information concerning dangerous situations can be
also provided using the reserved field Other data.
Table 1: Warning Message.
Message type Hazard position
Host identity Retransmission counter
Sending moment Hazard description
Criticality type Criticality level
Other data Default acceptance
4.2 WAMs Forwarding
As WAMs contain indications about dangerous
situations in traffic, they are subject to
retransmissions. Delivering a warning message to as
many hosts as possible in a short time was the
desideratum, and we took advantage of the
redundancy provided by a flooding-alike technique.
Thus, the retransmission of WAMs is controlled by
counters. Each WAM includes a retransmission
counter that indicates how many times it was
retransmitted. When a host retransmits a warning
message, the retransmission counter is decreased and
the new value is included in the (re)transmitted
message. A host that received and considered a
warning message, it retransmits it if the message was
not previously retransmitted and if the
retransmission counter is higher than zero. The
retransmission counter is set to a higher value if the
(original) issuer of a WAM decides that it is of
importance to disseminate the message in a larger
geographical area. We defined the retransmission
counter on the basis of the maximum number of
hosts (i.e. MNH) that can coexist in a local network.
Thus, the retransmission counter was specified as
β*MNH, with β = 1 for large area notifications, and
β = 0.5 for notifications within a local network.
A problem related to WAMs retransmission is
that the same message can be forwarded at the same
moment by a number of hosts close to each other.
This lead to a peak-load on the channel, which can
in turn reduce the communication quality. Even
more, it can lead to information loss. For alleviating
the consequences of this behavior, we enforce the
deferring of retransmitted WAMs. Thus, each host
waits a short time interval before retransmitting a
WAM. One possibility is to randomize this interval.
We implemented this approach by randomly
selecting a deferring interval between 0 and 0.1 s.
Another possibility is to calculate a deferring
interval that is inversely proportional to the distance
to sender. This approach allows distant vehicles to
relay messages faster, leading to a more rapid
propagation of data in an extended area. We
implemented this approach by specify the interval
for deferring the WAM retransmission as:
⎪
⎪
⎭
⎪
⎪
⎬
⎫
⎪
⎪
⎩
⎪
⎪
⎨
⎧
<
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
<
=
Tdr
SATkD
T
TTdefer
D
SAT
kTdr
Tdefer
*,
max
max,**
In the above formula, D is the distance to sender,
SAT is the size of the communication service area, k
is a system parameter, Tmax is a maximum value for
the deferring interval, and Tdr is a regular value for
deferring the WAMs retransmission.
5 EVALUATION
An evaluation environment was developed by
integrating the proposed communication protocol
within a well-known network simulator, i.e.
GloMoSim. Traffic simulators have been developed
for generating movement patterns close to those of
real vehicles. For evaluating the performance of the
reactive component of the protocol, we used the
delivery delay for WAMs, and the WAM
dissemination success, i.e. the number of vehicles
that should receive a WAM reported to the number
of vehicles that received it. These metrics were
evaluated when WAMs were transmitted in the
presence of dissemination of BSMs.
The free parameters that we have used were:
- Load density, 6 - 20 [vehicles/km/lane].
- Vehicles mobility, maximum speed: 10 - 40 [m/s].
- Service area threshold (SAT), 50 - 600 [m].
Beside the communication performance, the system
usefulness for help avoiding accidents was
EMERGENCY INFORMATION DISSEMINATION IN MOBILE NETWORKS FOR VEHICLES
287
investigated. We examined if specific crashes can be
avoided by using a collaborative safety system based
on reactive vehicular communication. We first
simulated the accidents and the safety system
operations in order to derive requirements on
communication (e.g. latency) (Chisalita, 2006). We
then investigated if WAMs sent by specific vehicles
can fulfill these requirements.
When investigating the communication
performance, we used a general traffic scenario
modeling a two-lane bi-directional road. The
movement of the vehicles was specified using a car-
following model given in the literature (Chisalita,
2006). For investigating the system usefulness to
accident avoidance, we used realistic accidents
modeled using their descriptions given in crash
research (DOT, 2003).
The evaluation was performed for a BSMs
frequency of 10 BSMs/second. The tests were
performed using the standard radio layer of
GloMoSim (i.e. based on IEEE 802.11), and CSMA
as the MAC scheme. The propagation model was two-
ray and the nodes had a transmission range of 320 m.
For investigating the success of disseminating
WAMs, we define a zone of interest that contained
the vehicles that should receive specific WAMs. For
particular accident scenarios, this zone contained all
the vehicles in the simulation. For the general traffic
scenario, the zone was the extent of a local network
when WAMs were generated only within local
networks. When WAMs were generated in larger
areas, the zone contained vehicles in behind on the
same lane, and vehicles in front on the opposite lane,
situated at less than 500 meters from the vehicle that
issued the WAM (when the WAM was generated).
For evaluating the communication performance
we randomly selected hosts that generated WAMs.
The moments when these messages were issued
were also randomly selected. When not varied, the
SAT was 300 m, the maximum achievable velocity
was 25 m/s, and the network load was
6 veh/km/lane. The initial settings for the deferring
approach based on the distance to sender were
Tmax = 0.2 s, Tdr = 0.05 s, and k = 3.
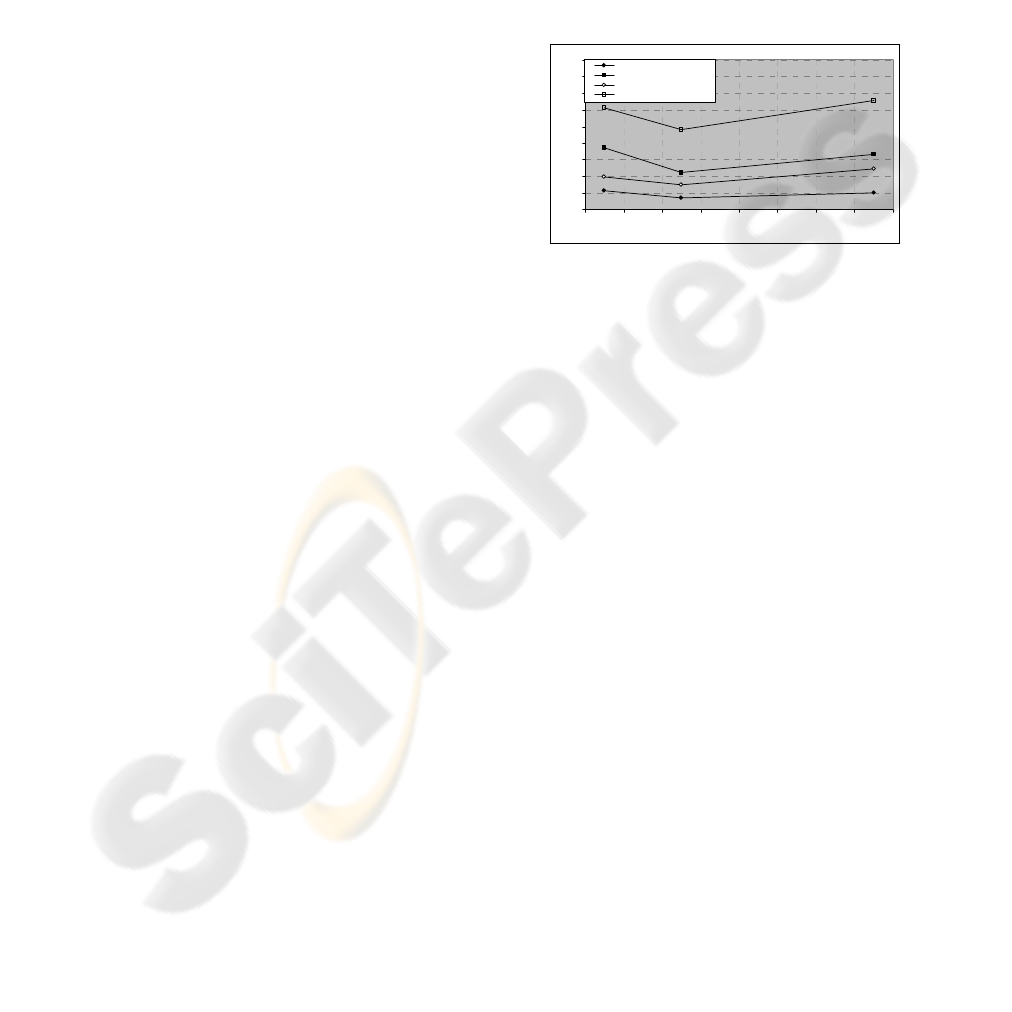
We exemplify in Figure 2 the delay for WAMs
dissemination in a large area as a function of
network load. The graph shows the metric variations
for both deferring approaches, and present average
and maximum delay values. For low and high
network loads, the delay had larger values. For low
network loads, a small number of vehicles could
retransmit the issued WAMs. Consequently, more
retransmissions were needed for WAMs to reach
distant vehicles, which induced longer delays. For
high network loads, the contention for accessing the
medium was accentuated, and the vehicles waited a
longer time before being able to send WAMs.
Consequently, the delay increased. In these tests, the
random deferring technique assured smaller delays
that the technique based on the distance to sender.
The results of the evaluation indicated that
large area dissemination of WAMs (e.g. till 3.5 km)
with relatively low delays (e.g. 0.8 seconds) is
possible with the proposed protocol. We note that
delay values less than 1 second were considered
appropriate for delivering emergency notifications in
large areas (Briesemeister, 2001).
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
5 7 9 111315171921
Load Density [veh/km/lane]
Delay [s]
Average delay random
Ma xi m de l a y r a n d o m
Average delay distance
Maxim delay distance
Figure 2: Delay – load density.
The information dissemination success was 100 %
when the random deferring technique was used.
However, for the technique based on the distance to
sender the metric has decreased to 86 %, which
indicated that this approach was less reliable.
We also investigated the dissemination of
WAMs only within a local network. In this case we
employed the random approach for deferring the
WAMs retransmission. The results revealed patterns
similar to the previous tests, but with considerably
lower values for the delay. For instance, the highest
value of the maximum delay was 4 times lower for
WAMs dissemination within local networks. The
information dissemination success was again 100%.
As previously mentioned, we have also
investigated the usefulness of the proposed protocol
in avoiding collisions. These tests involved a
significant number of relevant traffic accidents
(Chisalita, 2006). We exemplify in here these
analyses with an intersection scenario that is
introduced in Figure 3. Two vehicles, V1 and V2,
are involved in a crash as follows. V2 is initially
stopped and then tries to pass the intersection. The
driver in V2 fails to notice the approaching vehicle
V1. When the driver in V1 realizes that V2 indeed
wants to pass the intersection, she/he tries to brake,
but is too late and V1 crashes into V2.
WINSYS 2006 - INTERNATIONAL CONFERENCE ON WIRELESS INFORMATION NETWORKS AND SYSTEMS
288

Figure 3: Intersection accident scenario.
The accident avoidance can be achieved by
providing the driver in V1 with early information
about V2’s maneuver. Thus, we assumed that V2
sends a WAM when it starts to pass the intersection
because it comes from a non-priority road. We then
investigated if this WAM can be successfully
received in time by V1 and by other vehicles in the
simulation. The analysis indicated a delay of 0.64 ms
for V2’s WAM. This value was considerably lower
than the latency required for avoiding the initial
accident, i.e. 0.5 s. In addition, all the other vehicles
received the WAM with similar delays.
To summarize, the proposed protocol allows for
WAMs distribution with small delays in large areas
and very low latencies in small areas. The delay
values also fulfill the requirements of safety
applications, and are similar to, or lower than, results
obtained by pure reactive protocols (e.g. Yang et al.,
2004). The high values of the dissemination success
show that the emergency notifications were received
by the hosts in need. In addition, investigations of
accidents avoidance indicate the proposed solution
to effectively support in-vehicle safety systems.
In previous work we have obtained good
communication performance for the proactive
operation of the protocol (Chisalita & Shahmehri,
2006). In this work we also investigated the
communication performance when both the proactive
and the reactive modes were active. The results
indicated that the reactive operation did not pose
significant overload on the communication.
6 CONCLUDING REMARKS
This paper focuses on the distribution of emergency
notifications to vehicles in traffic. We propose a
technique for disseminating warning messages that
can fulfill requirements of safety applications.
Simulation results indicate that the communication
performs well in various conditions.
Future work includes investigations of
alternative techniques that can provide even lower
delivery latency while maintaining high
dissemination success. Further specification of the
content and digest of warning messages for
implementation of specific safety applications is also
of interest.
REFERENCES
Evans, L., 2004. Traffic safety, Bloomfields Hills, MI,
Science Serving Society.
Chisalita, I., 2006. Communication and networking
techniques for traffic safety systems, PhD Thesis,
ISBN 91-85523-77-X, Linköping University, Sweden.
Zador, P., Krawchuk, S. & Voas, R., 2000. Final report -
Automotive Collision Avoidance System (ACAS)
program, Delphi-Delco Electronic Systems, U.S.A.
Bishop, R., 2000. Intelligent vehicle applications world-
wide. IEEE Intelligent Systems, vol. 15, pp. 78-83.
Biswas, S., Tatchikou, R., & Dion F., 2006. Vehicle-to-
vehicle wireless communication protocol for
enhancing traffic safety. IEEE Communications
Magazine, pp. 74-82.
DOT, 2003. Intelligent Transportation Systems, U.S.
Department of Transportation, http://www.its.dot.gov/.
Miller, R., & Huang, Q., 2002. An adaptive peer-to-peer
collision warning system. IEEE Vehicular Technology
Conference, Birmingham, USA, pp. 317-321.
Royer, E.M., & Toh, C.K., 1999. A review of current
routing protocols for ad hoc mobile wireless networks.
IEEE Personal Communications, Vol. 6, Issue 2, pp.
46-55.
Briesemeister, L., 2001. Group membership and
communication in highly mobile ad hoc networks, PhD
thesis, Technical University of Berlin.
Yang, X., Liu, J., Zhao, F., & Vaidya, N.H., 2004. A
vehicle-to-vehicle communication protocol for
cooperative collision warning. Conference on Mobile
and Ubiquitous Systems: Networking and Services, pp.
114-123, Boston, USA.
Sun, M.-T., Feng, W.-C., Lai, T.-H., Yamada, K., Okada,
H., & Fujimura K., 2000. GPS-based message
broadcast for adaptive inter-vehicle communications.
IEEE Vehicular Technology Conference, pp. 2685 –
2692, Boston, USA.
ASTM, 2003. Standard specification for
telecommunications and information exchange
between roadside and vehicles systems – 5 GHz band
Dedicated Short Range Communications (DSRC)
Medium Access Control (MAC) and Physical Layer
(PHY), ATM 2213-03.
Asher, H.J., Galler, B.A., 1996. Collision warning using
neighboring vehicle information. Intelligent
Transportation: Realizing the Benefits, Houston,
Texas, USA.
Chisalita, I., Shahmehri, N., 2006. Adaptive dissemination
of safety data among moving vehicles. IEEE Personal,
Indoor and Mobile Radio Communication Symposium,
Helsinki, Finland, in press.
V1
V2
EMERGENCY INFORMATION DISSEMINATION IN MOBILE NETWORKS FOR VEHICLES
289
