
NON-INTRUSIVE TRACKING OF MULTIPLE USERS IN A
SPATIALLY IMMERSIVE DISPLAY
Jiyoung Park, Seon-Min Rhee
Dept. of Computer Science & Engineering, Ewha Womans University, Seoul, Korea
Myoung-Hee Kim
Dept. of Computer Science & Engineering, Ewha Womans University, Seoul, Korea
Center for Computer Graphics and Virtual Reality, Ewha Womans University, Seoul, Korea
Keywords: multi-user tracking, visual tracking, immersive display.
Abstract: We present a novel vision-based system for tracking multiple users in a spatially immersive display.
Without requiring them to wear any markers or other devices, we can detect and track the heads of several
participants. In a projection-based display environment, the lighting conditions make it difficult to extract
silhouettes or shape features from acquired images. Using a separate IR lighting and stereo camera system
solves the problem, and makes background subtraction simple and fast. We start by finding general location
of the users’ heads in each image, from the silhouettes and projection histogram of the foreground regions.
These points are used to create search areas, one in each image of a stereo pair. By cross-correlation
between the search areas, corresponding points in each image are identified, and these are used to determine
an accurate 3D location on the head. Finally, the search areas in consecutive frames are correlated to
maintain the identification of the users over time. Experimental results demonstrate the viability of the
proposed system.
1 INTRODUCTION
User tracking has been studied extensively in the
context of many applications, such as surveillance
and virtual reality (VR). In an immersive VR
environment, tracking is essential to provide the user
with the correct view and accurate interactions with
virtual objects. Although there are many user
tracking methods, non-intrusive tracking is the most
desirable since it offers the user a more natural and
comfortable VR environment. Spatially immersive
displays are now widely used and their scale is
increasing, so that the tracking of multiple users is
becoming crucial. But relatively little work has been
done on non-intrusive multiple user tracking in
immersive environments. While Vorozcovs et al.
(2005) recently developed an optical tracking
method for a spatially immersive display, it can only
follow a single user and requires a special device to
be worn on the user’s head. There are two main
reasons for the lack of work on user tracking in large
VR environments. First, a static background cannot
be guaranteed because the image projected on the
display screens also results in continuously varying
illumination of the users, which is disastrous for
robust feature extraction. Secondly, possible camera
set-ups are very restricted because the camera must
not occlude the projection screen. One option is to
attach cameras just above the screens. But this
configuration does not allow general feature-based
tracking methods to provide stable results, because
important features of the face or body of a user are
not always seen in the resulting image sequences.
In this paper, we introduce a vision-based
approach for detecting and tracking multiple users in
a spatially immersive display. A generic CAVE
TM
system was used, with no additional custom
hardware. The lack of intrusive devices encourages
intuitive interaction between multiple users and
maximizes the capacity of collaborative
environments. We believe it will motivate the
464
Park J., Rhee S. and Kim M. (2006).
NON-INTRUSIVE TRACKING OF MULTIPLE USERS IN A SPATIALLY IMMERSIVE DISPLAY.
In Proceedings of the First International Conference on Computer Vision Theory and Applications, pages 464-467
DOI: 10.5220/0001372204640467
Copyright
c
SciTePress

enhancement of existing VR applications, and the
use of VR technology in new areas of practical
significance.
2 FOREGROUND EXTRACTION
IN A SPATIALLY IMMERSIVE
DISPLAY
Our method of tracking users in an immersive
display is based on the generation of infrared images
which are not affected by the time-varying images
on the screens, which are in the visible system. This
allows us to extract the foreground of the scene (i.e.
the users in the VR environment) and we can then
track the position of their heads by employing
computer vision techniques.
2.1 Hardware Setup
We use a four-sided CAVE
TM
-like environment
(with a front, left, right and bottom screen, each
measuring 2.4m x 2.4m) for our experiments. We
located two IR lights and cameras on top of the front
screen as depicted in Fig. 1. The directions of the
two lights are set differently to illuminate the top
and bottom part of a body in the environment, as
evenly as possible. A band-pass filter is attached to
each camera so that it only receives IR light. A non-
IR reflecting curtain in the entry to the environment
improves the IR segmentation results. We used
Computar IR75 lamps and Point Grey Dragonfly
grayscale video cameras with an IEEE-1394
interface.
2.2 Foreground Segmentation using
IR
Having eliminated the changing background by the
use of IR, the grayscale images from the cameras are
input to a background subtraction method optimized
for infrared light (based on Matusik 2001). First, a
sequence of n frames of the static background is
recorded and the mean and standard deviation of
each pixel in the image are calculated. Then the
intensity of each pixel is compared with the mean
value at every frame. If the modulus of the
difference between them is greater than a predefined
multiple k of the standard deviation, the pixel is
classified as foreground. In a post-processing stage,
a median filter is used for noise removal and the
resulting silhouette is smoothed. An example of an
extracted silhouette is shown in Fig. 2.
3 MULTI-USER HEAD
TRACKING
Our method of detecting multiple users from
infrared reflective images was inspired by ‘Hydra’
(Haritaoglu et al. 1999), which tracks several people
using silhouettes and a projection histogram of the
foreground regions.
At every frame, we extract the foreground
regions by subtracting background, and then
generate a projection histogram from the regions we
have detected. A vertical projection histogram is
subsequently computed by projecting the binary
foreground region on to the horizontal axis, as
depicted in Fig. 2. Combining the silhouette and
histogram from each image of a stereo pair, we are
able to identify each user and locate their head
position in three dimensions. At present, the system
has to be told the number of users before the
detection process starts.
Fi
g
ure 1: Hardware setu
p
.
a
a
Camera
1
Camera
2
Figure 2: Examples of extracted silhouette(first row)
and projection histogram.
NON-INTRUSIVE TRACKING OF MULTIPLE USERS IN A SPATIALLY IMMERSIVE DISPLAY
465
3.1 Head Detection using Silhouettes
and a Projection Histogram
Location of the users’ heads begins with an
approximated outline of the foreground boundary
(Fig. 3). Due to the structure of the human body, the
silhouette boundary will have salient points
corresponding to body parts such as the head, hands
and feet. We expect heads to be at the top of the
foreground area, and to have a higher value than the
mean in the projection histogram.
To detect the head, we check the convexity of
each pair of adjacent line segments on the contours.
If a junction is convex, and its vertical position is
higher than the centroid of the whole area, it is
classified as a candidate head. When all candidate
heads have been found, we use the projection
histogram to make a final choice of final head points.
If more heads are detected than the number
specified, we prune surplus heads in the order of
their histogram value. Most ‘false’ heads turn out to
be hands..
3.2 Stereo Correspondence and
Tracking
Next, the spatial location of heads is calculated. In
each stereo pair, we should now have two
corresponding points to the top of each user’s head.
However, because these points were determined
from the approximated silhouette, the exact three-
dimensional head position cannot be obtained by
using them as corresponding points. Instead, we
need to find corresponding points in the original
images of the stereo pair. We therefore create a
search area around each head point which was
finally determined in the last step. And we set a
mask on the search area and cross-correlate the mask
regions of the same size in each search area. Moving
two masks in each whole search area and computing
cross-correlation coefficient value, we select the
most similar from each image regions, and make the
centers of the mask areas the corresponding points.
Finally, in order to identify each user in every
frame, we analyze the correlation of each search area
in the current frame with those in the previous
frame. The two consecutive search areas with the
highest correlation are assumed to correspond to the
same person.
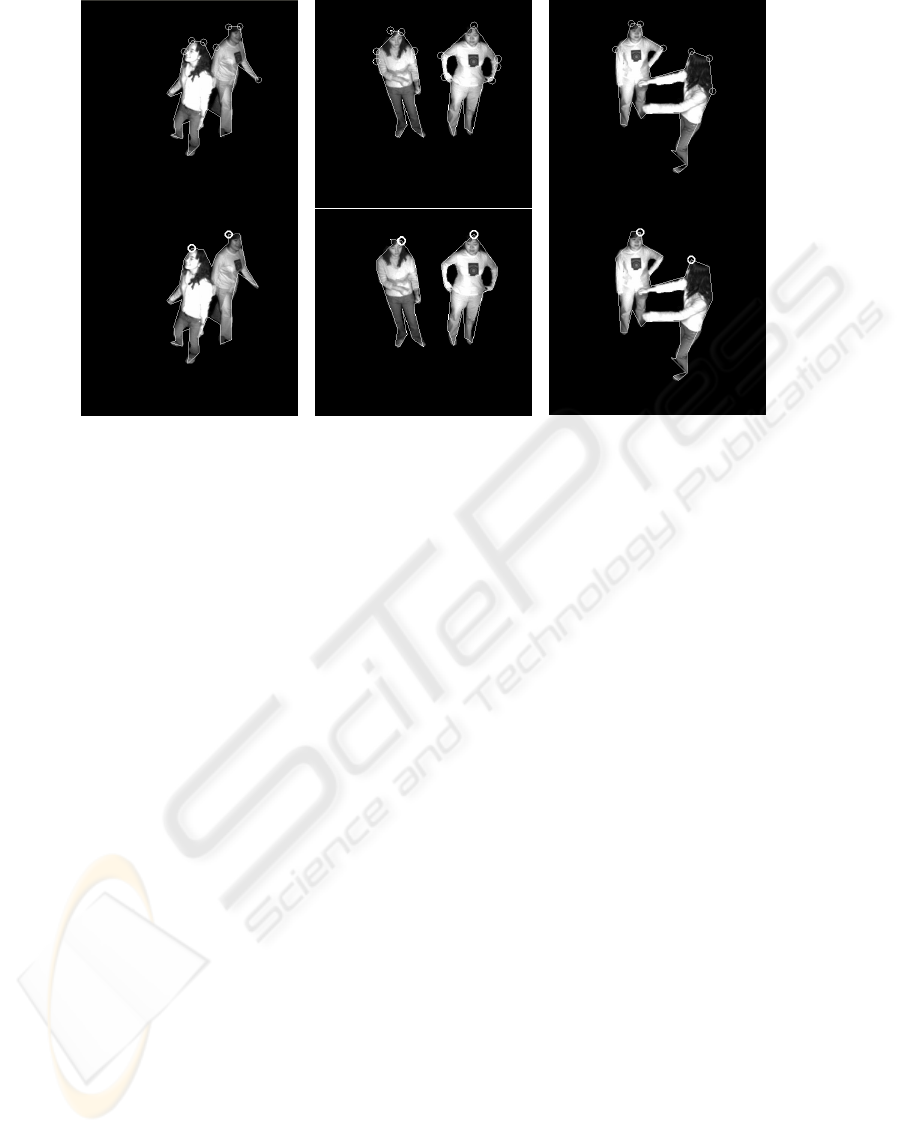
4 EXPERIMENTAL RESULTS
The result of tracking two users in a VR
environment is shown in Fig. 4. In this sequence,
one user moves from left to right across the other
user. Corresponding points on the two users’ heads
are found accurately, and tracking copes well with
the users’ movements.
Our tracking method runs at 20-25Hz on a PC
with dual 2.8GHz Xeon processors. The Intel
OpenCV library was used to handle 640x480
resolution grayscale images. Execution times depend
on the number of participants, and the size of the
Figure 3: An example of candidate heads(first row) and detected head points.
VISAPP 2006 - MOTION, TRACKING AND STEREO VISION
466

search area, and the mask used in cross-correlation.
We set the size of the search area to 30×30 pixels
and the mask to 20×20 pixels in this experiment.
5 CONCLUSIONS
We have proposed a vision-based tracking method
for multiple users in a spatially immersive display. It
requires no markers and detection and tracking are
robust and fast.
However, our system cannot guarantee perfect
tracking results if some of the users are totally
occluded. In a future enhancement of our system, we
plan to use depth information to separate and
identify users correctly.
In addition, we are looking for ways of
recognizing body parts more effectively in acquired
images. Because the viewpoint of the cameras is
high, the images are foreshortened, which makes it
difficult to extract and identify body parts accurately.
One possible solution is to warp the acquired images,
making them more similar to those that would be
acquired from a lower camera position, and thus
showing the body more clearly.
Eventually, we intend to develop a VR
application which provides collect images of the
virtual scene to each user, based on the viewing
positions obtained from our system.
6 ACKNOWLEDGEMENTS
This work was supported by the Korean Ministry of
Information and Communication under the
Information Technology Research Center (ITRC)
Program.
REFERENCES
Haritaoglu, I., Harwood, D., Davis, L. S., 1999. Hydra:
Multiple people detection and tracking using
silhouettes. In IEEE International Workshop on Visual
Surveillance. IEEE Computer Society Press.
Matusik, W., 2001. Image-based visual hulls. Master’s
thesis, Massachusetts Institute of Technology.
Vorozcovs, A., Hogue, A., Stuerzlinger, W., 2005. The
Hedgehog: a novel optical tracking method for
spatially immersive displays. In IEEE VR 2005. IEEE
Computer Society Press.
Figure 4: Examples of stereo correspondence and tracking : the view of camera#1(first row) and camera#2 in Fig. 1.
NON-INTRUSIVE TRACKING OF MULTIPLE USERS IN A SPATIALLY IMMERSIVE DISPLAY
467
