
SEGMENTATION ALGORITHMS FOR EXTRACTION OF
IDENTIFIER CODES IN CONTAINERS
Juan A. Rosell Ortega, Alberto J. P
´
erez Jim
´
enez and Gabriela Andreu Garc
´
ıa
Grupo de Visi
´
on por Computador , DISCA.
Universidad Polit
´
ecnica de Valencia
Camino de Vera s/n, Valencia, Spain
Keywords:
segmentation algorithms, characters.
Abstract:
In this paper we present a study of four segmentation algorithms with the aim of extracting characters from
containers. We compare their performance using images acquired under real conditions and using results of
human operators as a model to check their capabilities. We modified the algorithms to adapt them to our needs.
Our aim is obtaining a segmentation of the image which contains all, or as much as possible, characters of
the container’s code; no matter how many other non relevant objects may appear; as irrelevant objects may be
filtered out by applying other techniques afterwards. This work is part of a higher order project whose aim is
the automation of the entrance gate of a port.
1 INTRODUCTION
1
A lot of work has been done in the area of com-
paring segmentation algorithms attending to different
categorizations. There have been a number of sur-
vey papers on thresholding; for instance, in (Sezgin
and Sankur, 2004), a taxonomy of thresholding tech-
niques is presented, and several algorithms are cate-
gorized, expressed under a uniform notation and com-
pared according to unified criteria.
We present in this paper, however, a comparison of
four segmentation algorithms aimed to deal with pic-
tures containing container code characters. The goal
of the work is not to compare the performance of the
algorithms in general conditions, but with a wide set
of images that correspond to images representative of
what the system will have to deal with in real situa-
tions (see figure 1 as a sample of the images we used).
Our criterion to check results was comparing the re-
sults of each algorithm with the results obtained by a
human operator.
Currently in most trading ports, gates are con-
trolled by human inspection and manual registration.
This process can be automated by means of com-
puter vision and pattern recognition techniques. Such
a prototype should be built by developing different
1
This work has been partially supported by grant
FEDER-CICYT DPI2003-09173-C02-01.
Figure 1: Sample image of a container.
techniques, such as image preprocessing, image seg-
mentation, feature extraction and pattern classifica-
tion. The process is complex; because it has to deal
with outdoor scenes, days with different climatology
(sunny, cloudy...), changes in light conditions (day,
night) and dirty or damaged containers.
A first approach to the process of code detection is
presented in a previous work (Salvador et al., 2001)
and the overall process is discussed also in (Salvador
et al., 2002). In these works, authors use a morpho-
logical operator called top-hat to segment the same
kind of images as we do. This operator has to be
applied twice per image, once trying to distinguish
375
A. Rosell Ortega J., J. Pérez Jiménez A. and Andreu Gar
´
cıa G. (2006).
SEGMENTATION ALGORITHMS FOR EXTRACTION OF IDENTIFIER CODES IN CONTAINERS.
In Proceedings of the First International Conference on Computer Vision Theory and Applications, pages 375-380
DOI: 10.5220/0001365303750380
Copyright
c
SciTePress

clear objects on a dark background and again looking
for dark objects on a clear background. Though this
method had good results, we tried to improve their
performance by using the methods we expose in this
article.
Another work (Atienza et al., 2005), presents an
investigation which is currently being developed. The
aim of the authors of this paper is to use the optical
flow in order to shrink the area where the container
code could be found and speed up the segmentation
process; however, the method is time consuming and
an effort is currently being done in order to optimize
it.
Our aim was finding a suitable successful segmen-
tation algorithm for the process of code detection
mentioned previously. To achieve this goal, we tested
several segmentation algorithms found in the litera-
ture. By comparing the results obtained from the four
algorithms we tested, we extracted conclusions about
which could perform better under the conditions we
work with. We wanted to know which algorithm (or
algorithms) could fit better to our needs, and, if it was
the case, which we could merge into one, that could
produce better results than any other algorithm on its
own.
In summarize, we are looking for an algorithm that
meets the following constraints:
• It must detect all characters in the code, or as much
as possible.
• It must find characters independently of their
colour (white characters on a dark background and
vice versa).
• It must be independent of image light conditions.
• It must create the minimal list of found objects; as
segmentation algorithms will always find objects
which are not relevant (see picture 4), the best will
be the one which creates a list that only contains
objects which correspond to characters in the code.
We have organized the paper as follows, in next
section we describe the algorithms used, section 3 will
describe the pictures used and the experiments done;
in section 4 we show the results we obtained in the
experiments and in section 5 we discuss our conclu-
sions.
2 ALGORITHMS
As mentioned before, we have implemented and com-
pared four different algorithms. In this section we
describe them briefly and we give a formal introduc-
tion to each one. These algorithms are: the water-
shed algorithm (Beucher and C-Lantu
´
ejoul, 1979),
LAT (Kirby and Rosenfeld, 1979), local variation al-
gorithm (Felzenszwalb and Huttenlocher, 1998) and
thresholding algorithm. Each algorithm represents a
different approach to the segmentation problem. Our
election was based on previous knowledge of the al-
gorithms and also on the comparison of the literature
describing them.
2.1 Watershed
Application of the watershed transform to image
segmentation was proposed in (Beucher and C-
Lantu
´
ejoul, 1979). The algorithm takes a gray scale
image and considers it as a topographic surface. A
process of flooding is simulated on this surface; dur-
ing this process two or more floods coming from dif-
ferent basins may merge. To avoid this, dams are built
on the points where the waters flooding from different
basins meet; at the end of the algorithm, only dams
are over water level. These dams define the watershed
of the image.
One of the problems of this algorithm is over seg-
mentation. We took no direct action to avoid it; in-
stead, we used filters (as mentioned later in section 3)
to remove regions from the segmentation which were
not relevant.
2.2 LAT
This algorithm was proposed by Kirby and Rosenfeld
in (Kirby and Rosenfeld, 1979). Adaptive threshold-
ing typically takes a grayscale or colour image as in-
put and, outputs a binary image representing the seg-
mentation. For each pixel in the image, a threshold
has to be calculated. If the pixel value is below the
threshold it is set to the background value, otherwise
it assumes the foreground value; or vice versa.
The algorithm uses a window w
n×n
(p
i
) of n×n el-
ements (the neighbourhood to consider for each pixel
p
i
), n is odd in order to centre the matrix on the con-
sidered pixel of the image. This matrix is used to cal-
culate statistics to examine the intensity f(p
i
) of the
local neighbourhood of each pixel p
i
. The statistic
which is most appropriate depends largely on the in-
put image. We used the mean of the local intensity,
computed as:
µ(p
i
)=
1
n ∗ n
∗
p
j
∈w
n∗n
(p
i
)
f(p
j
) (1)
The size of the considered neighbourhood has to
be large enough to cover sufficient foreground and
background pixels, otherwise a poor threshold is cho-
sen. On the other hand, choosing regions which are
too large can violate the assumption of approximately
uniform illumination.
A factor k may be used to adjust the comparison of
the statistic used with the pixel intensity value. This
VISAPP 2006 - IMAGE ANALYSIS
376

factor multiplies the average gray level when compar-
ing it to the gray level of the pixel.
The algorithm forms the segmentation of image I
by calculating the union of the segmentations result of
using different factors, converting image I into bina-
rized image I
. Each pixel in I
is defined depending
on its counterpart in I:
∀p
i
∈ I
,p
i
= thr(p
i
):p
i
∈ I (2)
with thr(p
i
) defined as:
thr(p
i
)=
1,ifµ(p
i
) ≥ k × f (p
i
)
0, otherwise
(3)
We looked for connected regions after each thresh-
olding and merged the results of each segmentation
with the previous. So, if a set of pixels belonged to
any region for a certain segmentation, they did in the
final segmentation.
2.3 Thresholding
It is the simplest approach to image segmentation.
The input is a gray level image I and the output is a
binary image I
representing the segmentation where
black pixels correspond to background and white pix-
els correspond to foreground (or vice versa). In a sin-
gle pass, each pixel in the image is compared with a
given threshold k which is a gray level. If the pixel’s
intensity f (p
i
) is higher or equal to the threshold k,
the pixel p
i
is set to, say, white in the output. If it is
under k, it is set to black. The segmentations result of
applying each threshold k are joined in a similar way
as in LAT.
2.4 Local Variation
The algorithm we implemented is based on the work
introduced in (Felzenszwalb and Huttenlocher, 1998).
An important feature of this algorithm over the other
three is that it does not need a priori information on
which the colour of the objects is.
Felzenszwalb’s approach consists on considering a
criterion for segmenting images based on intensity
differences between neighbouring pixels. The algo-
rithm is based on the idea of partitioning an image
into regions, such that for each pair of regions the
variation between them is bigger than the variation
within regions. The criterion for determining the sim-
ilarity of image regions is based on measures of im-
age variation. The measure of the internal variation of
a region is an statistic of the intensity differences be-
tween neighbouring pixels in the region. The measure
of the external variation between regions is the mini-
mum intensity difference between neighbouring pix-
els along the border of the two regions. The original
algorithm uses two parameters, the minimum size of
the regions in the final result, and one used to smooth
the image before processing it.
Felzenszwalb starts by creating a graph that rep-
resents the image. Arches in the graph are given a
weight that corresponds to the difference in inten-
sity of pixels represented by their vertices. Arches
join pixels to their 8-connected neighbourhood. To
achieve the fastest ordering, original authors recom-
mend in their paper the bucket sort algorithm (Cor-
men et al., 1990). After this step, all arches are or-
dered by non-decreasing weight. The algorithm then
follows by taking an arch at a time and compare the
regions to which each of its ends belongs to. Both
regions will be merged if they accomplish with the
established criteria. The output of the algorithm is a
set of regions in which the image is segmented.
Formally, the graph G on the image I is defined as
follows. Each pixel p
i
in the image will correspond to
a vertex v
i
in the graph. Arches connect neighbouring
pixels and each arch is assigned with a weight. The
function used to calculate the weight of the arches is
defined as follows:
w(v
i
,v
j
)=
|I(v
i
) − I(v
j
)|,if(v
i
,v
j
) ∈ E
∞, otherwise
(4)
E is the set of all edges defined. As we said, for
each vertex v
i
in the graph exists a pixel p
i
in the im-
age, thus, E is the set of all arches connecting ver-
tices in G for some given distance d (in our case,
d =1, so we only consider immediate neighbours),
E = {(v
i
,v
j
):||p
i
− p
j
|| ≤ d}. The segmentation
S of an image I is then a partition of I with a corre-
sponding set of edges, G ⊆ E, such that each compo-
nent C in the segmentation, C ∈ S, corresponds to a
connected component in the graph G.
We used the mean intensity of the region to decide
whether two regions should merge or not instead of
the variance as in the original algorithm. Following
a similar approach as Felzenszwalb does in his algo-
rithm, we decided that two different regions should
join into one if the mean intensity of both regions is
similar. Another difference is that we didn’t use a
minimum size of region, in fact, regions were merged
until the process reaches a situation in which no more
regions could be merged.
We modified the original algorithm because it was
difficult to find values for its parameters that could
perform well with the variety of images we had. We
used the mean of gray intensity of the region which,
after several tests, proved to perform similar to the
original algorithm. In our case, however, we used one
parameter, the percentage of similarity k. For each
value of k we have a different segmentation, all these
resulting segmentations are then joined as in the pre-
vious algorithms.
SEGMENTATION ALGORITHMS FOR EXTRACTION OF IDENTIFIER CODES IN CONTAINERS
377
3 EXPERIMENTS
We used 309 real images with each algorithm in order
to obtain experimental results to evaluate their perfor-
mance. These images represent truck containers and
have a size of 720 × 574 pixels in gray levels. They
were acquired under real conditions in the admission
gate of the port of Valencia. In figure 2, there is a
sample of the kind of pictures we used. They were
selected randomly between a large set of pictures, but
we assured all variability was represented in this set
of pictures (sunny or cloudy days, daytime or night-
time, damaged containers...).
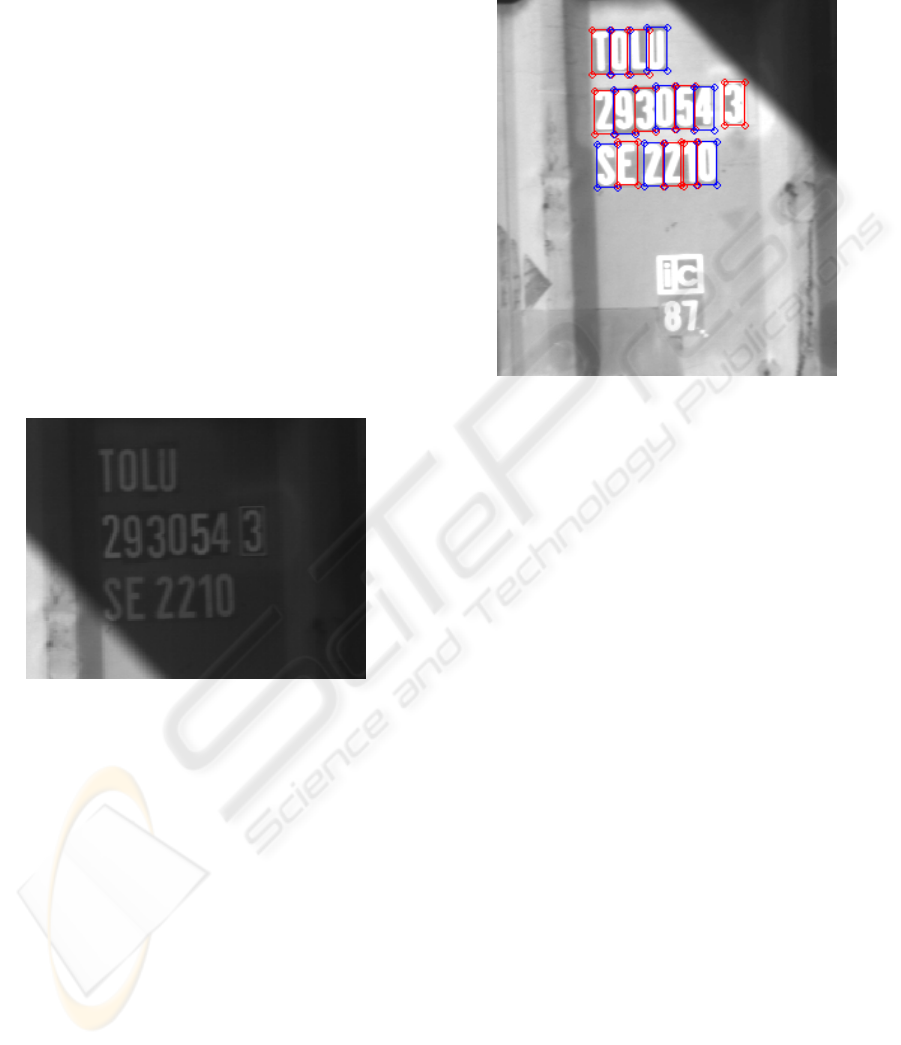
In order to extract conclusions about the perfor-
mance of the algorithms; we labelled by hand all char-
acters in the images. We made this by drawing the in-
clusion box of each character in the image and saving
the coordinates, an example is shown in figure 3. As
a result of this labelling, we had the number of code
characters and the coordinates of the inclusion boxes
of each code character of each image. We automated
the processing of the experiment’s results.
Figure 2: A sample container, image zoomed in to show
only the area of the container’s code.
During experiments, algorithms were not provided
with concrete information about light conditions of
each image during their executions, because we
wanted to know how they would perform in real con-
ditions.
Algorithms’ parameters vary in a range wide
enough to cover all possible situations. As watershed
needs no arguments, we need not to use any parame-
ter. For LAT we used a value of k in the range of
[0.9, 1.6] with a step value of 0.03, which makes a to-
tal of 23 segmentations per image. For thresholding
algorithm we used a value of k ranging from 20 to 220
with a step value of 5, which makes up 40 segmenta-
tions per image. With Local Variation we used a value
of the similarity percentage in the range [70%, 85%]
with a step of 5% which makes a total of 4 segmen-
tations. Besides, each algorithm (but Local Variation)
had to be executed twice per image, once searching
for white characters and again for black characters.
Because of its nature, Local Variation finds directly
characters no matter which colour they are.
Figure 3: Inclusion boxes drawn by a human operator.
We obtained of each algorithm a list of found ob-
jects in each image. These objects correspond to con-
nected regions with equal gray intensity levels. Some
of these objects were not relevant to our purposes, and
some others corresponded to the code characters.
As it may be seen in picture 4, the number of ob-
jects is bigger than the number of code characters.
We evaluate the good or bad performing of algo-
rithms depending on the amount of code characters
included in the list of objects it found, not in the total
amount of found objects. Other procedures applied
after this segmentation step may be implemented to
reduce the number of irrelevant objects. With a geo-
metrical filter we removed any object which did not
meet the geometrical properties we expect of any
character in the code (aspect ratio, minimum area
size, height and width).
Other filters could have also been applied. For in-
stance, contrast filters or classifier filters, that would
remove all objects which were not classified as a char-
acter. But there was the chance that filters hided errors
of the algorithms or add their own errors to the final
result, masking the performance of the algorithms.
We set up a method to compare the inclusion boxes
calculated by each algorithm with the inclusion boxes
we had labelled manually. We considered the algo-
rithm had done a hit if the inclusion box it had calcu-
lated and the hand labelled inclusion box overlapped
one on each other in a certain percentage.
We obtained the number of hits per image of each
algorithm, the number of failures (labels which had
no counterpart in the result list of the algorithm), the
VISAPP 2006 - IMAGE ANALYSIS
378
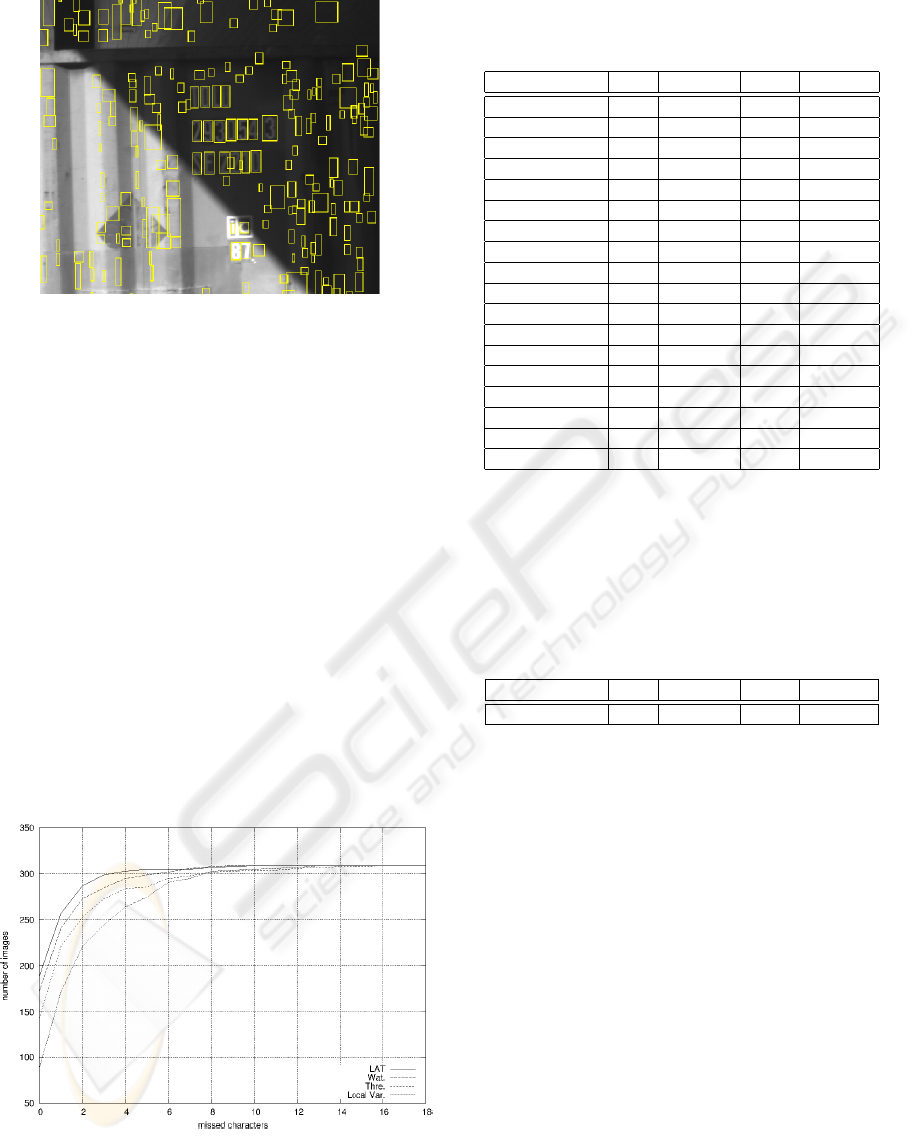
Figure 4: Inclusion boxes drawn by LAT.
total amount of objects found by the algorithm and
the total time spent.
4 RESULTS
The first results we obtained are shown in table 1. In
this table, we see that LAT is the one that performs
better. It is the one that gets the biggest amount of
images with up to 4 characters missed. Watershed is
the second algorithm that performs best. On the other
hand, the adaptation we made of the algorithm of lo-
cal variation has an erratic behaviour, this is maybe
due to the fact that we were only using the mean aver-
age of the regions to decide whether to merge them or
not (recall section 2.4). Values on table 1 are plotted
in figure 5.
Figure 5: Cumulative plot of images according to the num-
ber of missed characters.
In table 2, we show the mean time of execution for
each algorithm (in seconds). LAT is the fastest, and
Table 1: Performance of the algorithms. Amount of images
according to the number of missed characters.
Missed characters LAT Watershed Thres. Local var.
0 189 173 143 88
1 68 68 78 84
2 30 32 32 49
3 12 12 20 24
4 4 10 11 19
5 2 4 2 11
6 0 3 9 16
7 0 4 3 4
8 2 2 4 8
9 1 1 1 1
10 1 0 1 1
11 0 0 0 1
12 0 0 2 2
13 0 0 1 1
14 0 0 1 0
15 0 0 0 0
16 0 0 1 0
17 0 0 0 0
its execution time is far away from the amount of time
needed by the local variation algorithm(the slowest)
to execute, which is also the algorithm with the worst
performance.
Table 2: Mean time of execution of the algorithms.
Mean time \ Alg. LAT Watershed Thres. Local var.
seconds 1.31 7.11 1.78 26.54
After these first results, we thought it would be a
good idea trying to merge the best two algorithms
into one, in order to get benefits from both. Merg-
ing the algorithms consisted on applying them both
on the same image and take results together applying
the filters to the this merged output.
We repeated the tests taking both LAT and wa-
tershed algorithm as the basis of our merged algo-
rithm. We merged also LAT and thresholding algo-
rithm, though the last is not the second best, it is
fast and this could mean more hits with less execu-
tion time. We thought this was a good enough reason
as to give it a try. We made also a test joining these
three algorithms into one.
We were puzzled at first by the poor performance
of the local variation algorithm. We concluded we
needed to adapt the same philosophy we used for LAT
and let the algorithm iterate several times over the
same image looking for objects, and using in each it-
eration a different criterion (k) to merge regions. In
table 3 we compare the results we obtained with the
LAT-Watershed algorithm, the modified local varia-
tion algorithm and the LAT-Watershed-Thresholding
SEGMENTATION ALGORITHMS FOR EXTRACTION OF IDENTIFIER CODES IN CONTAINERS
379
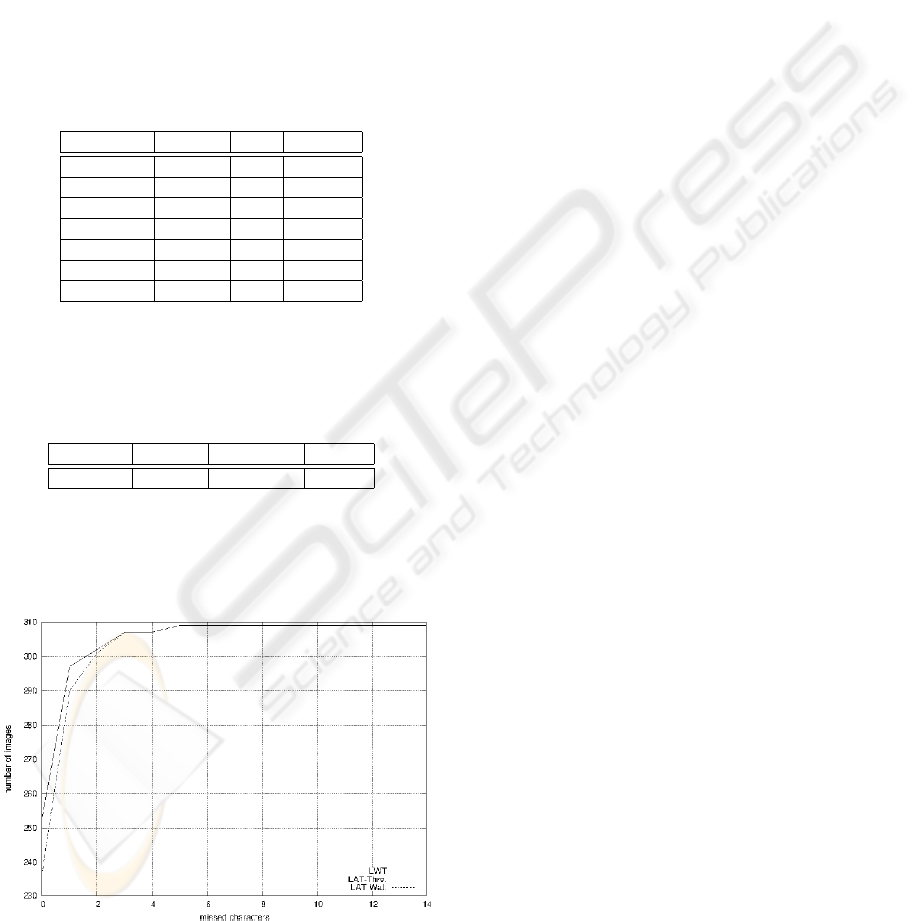
algorithm (called LWT in the table). We can see also
that the algorithm made by joining watershed algo-
rithm and LAT performs better than the rest, and with
the same performance as the serialization of thresh-
olding algorithm with watershed algorithm and LAT.
In table 4 we show the times consumed by the
merged versions; the algorithm formed by the seri-
alization of LAT and thresholding algorithm is a bit
quicker than the sum of the times of both algorithms
taken separately. In 6 we can see a graphical compar-
ison of the improved algorithms.
Table 3: Performance of the improved algorithms, com-
pared with the two algorithms with best results.
Missed char. LAT-Thr. LWT LAT-Wat.
0 237 253 253
1 53 44 44
2 11 5 5
3 6 5 5
4 0 0 0
5 2 2 2
6 0 0 0
Table 4: Mean time of execution of the improved algo-
rithms.
Mean time LAT-Thr. Lat-Wat-Thr. Lat-Wat
seconds 2.67 10.18 8.19
Figure 6: Cumulative plot of images according to the num-
ber of missed characters, for the improved algorithms.
5 CONCLUSIONS
We present a comparison of four segmentation algo-
rithms. We checked their performance dealing with
pictures with character codes on containers. We used
309 real images selected randomly between a large
set of real images, and compared the performance of
algorithms against the results given by a human oper-
ator.
Our effort was driven by the fact that we wanted to
find the algorithm that did not miss any character (or
the lowest amount possible) in the container’s code.
Our evaluation of the algorithms, then, penalties al-
gorithms which lose characters in the code. Future
efforts will focus on developing filters which allow
us to remove regions which are not relevant to our
search.
As results show, LAT or watershed algorithm meet
the criteria listed above, of having a big rate of suc-
cess segmenting characters, finding a big percentage
of them in the images. Mixing both of them into one
improves results with the penalty of having longer ex-
ecution times.
REFERENCES
Atienza, V., Rodas, A., Andreu, G., and P
´
erez, A. (2005).
Optical flow-based segmentation of containers for au-
tomatic code recognition. Lecture Notes in Computer
Science, 3686:636–645.
Beucher, S. and C-Lantu
´
ejoul (1979). Use of watersheds in
contour detection. Int. Workshop on Image Process-
ing, Real-Time edge and motion detection/stimation,
CCETT/INSA/IRISA IRISA Report n. 132, Rennes,
France, pages 2.1–2.12.
Cormen, T., Leiserson, C., and Rivest, R. (1990). Introduc-
tion to algorithms. The MIT Press, McGraw-Hill Book
Company.
Felzenszwalb, P. and Huttenlocher, D. (1998). Image seg-
mentation using local variation. Proceedings of IEEE
Conference on Computer Vision and Pattern Recogni-
tion, Santa Barbara, CA, pages 98–104.
Kirby, R. L. and Rosenfeld, A. (1979). A note on the use of
(gray level, local average gray level) space as an aid
in threshold selection. IEEE Transactions on Systems,
Man and Cybernetics SMC-9, pages 860–864.
Salvador, I., Andreu, G., and P
´
erez, A. (2001). Detection
of identifier codes in containers. Proc. SNRFAI-2001.
Castell
´
on, Spain. May de 2001., 1:119–124.
Salvador, I., Andreu, G., and P
´
erez, A. (2002). Preprocess-
ing and recognition of characters in container codes.
ICPR2002, Canada, 2002.
Sezgin, M. and Sankur, B. (2004). Survey over image
thresholding techniques and quantitative performance
evaluation. Journal of Electronic Imaging, 13:146–
165.
VISAPP 2006 - IMAGE ANALYSIS
380
