
MIXED REALITY FOR EXPLORING URBAN ENVIRONMENTS
Fotis Liarokapis, David Mountain, Stelios Papakonstantinou, Vesna Brujic-Okretic, Jonathan Raper
giCentre, Department of Information Science, School of Informatics, City University, London EC1V 0HB
Keywords: Mobile Interfaces, Augmented and Virtual Environments, Virtual Tours, Human-computer interaction.
Abstract: In this paper we propose the use of specific mobile system architecture for navigation in urban
environments. The aim of this work is to evaluate how virtual and augmented reality interfaces can provide
location and orientation-based services using different technologies. The virtual reality interface is entirely
based on sensors to detect the location and orientation of the user while the augmented reality interface uses
computer vision techniques to capture patterns from the real environment. The knowledge obtained from the
evaluation of the virtual reality experience has been incorporated into the augmented reality interface. Some
initial results in our experimental augmented reality navigation are presented.
1 INTRODUCTION
Navigating in urban environments is one of the most
compelling challenges of wearable and ubiquitous
computing. Recent advances in positioning
technologies - as well as virtual reality (VR),
augmented reality (AR) and user interfaces (UIs) -
pose new challenges to researchers to create
effective wearable navigation environments.
Although a number of prototypes have been
developed in the past few years there is no system
that can provide a robust solution for unprepared
urban navigation. There has been significant
research in position and orientation navigation in
urban environments. Experimental systems that have
been designed range from simple location-based
services to more complicated virtual and augmented
reality interfaces.
An account of the user's cognitive environment is
required to ensure that representations are not just
delivered on technical but also usability criteria. A
key concept for all mobile applications based upon
location is the 'cognitive map' of the environment
held in mental image form by the user. Studies have
shown that cognitive maps have asymmetries
(distances between points are different in different
directions), that they are resolution-dependent (the
greater the density of information the greater the
distance between two points) and that they are
alignment-dependent (distances are influenced by
geographical orientation) (Tversky, 1981). Thus,
calibration of application space concepts against the
cognitive frame(s) of reference (FORs) is vital to
usability. Reference frames can be divided into the
egocentric (from the perspective of the perceiver)
and the allocentric (from the perspective of some
external framework) (Klatzky, 1998). End-users can
have multiple egocentric and allocentric FORs and
can transform between them without information
loss (Miller and Allen, 2001). Scale by contrast is a
framing control that selects and makes salient
entities and relationships at a level of information
content that the perceiver can cognitively
manipulate. Whereas an observer establishes a
‘viewing scale’ dynamically, digital geographic
representations must be drawn from a set of
preconceived map scales. Inevitably, the cognitive
fit with the current activity may not always be
acceptable (Raper, 2000).
Alongside the user's cognitive abilities,
understanding the spatio-temporal knowledge users
have is vital for developing applications. This
knowledge may be acquired through landmark
recognition, path integration or scene recall, but will
generally progress from declarative (landmark lists),
to procedural (rules to integrate landmarks) to
configurational knowledge (landmarks and their
inter-relations) (Siegel and White, 1975). There are
quite significant differences between these modes of
knowledge, requiring distinct approaches to
application support on a mobile device. Hence,
research has been carried out on landmark saliency
208
Liarokapis F., Mountain D., Papakonstantinou S., Brujic-Okretic V. and Raper J. (2006).
MIXED REALITY FOR EXPLORING URBAN ENVIRONMENTS.
In Proceedings of the First International Conference on Computer Graphics Theory and Applications, pages 208-215
DOI: 10.5220/0001356702080215
Copyright
c
SciTePress

(Michon and Denis, 2001) and on the process of
self-localisation (Sholl, 2002) in the context of
navigation applications.
This work demonstrates that the cognitive value
of landmarks is in preparation for the unfamiliar and
that self-localisation proceeds by the establishment
of rotations and translations of body coordinates
with landmarks. Research has also been carried out
on spatial language for direction-giving, showing,
for example, those paths prepositions such as along
and past is distance-dependent (Kray, 2001). These
findings suggest that mobile applications need to
help users add to their knowledge and use it in real
navigation activities. Holl et al (Holl et al., 2003)
illustrate the achievability of this aim by
demonstrating that users who pre-trained for a new
routing task in a VR environment made fewer errors
than those who did not. This finding encourages us
to develop navigational wayfinding and commentary
support on mobile devices accessible to the
customer.
The objectives of this research include a number
of urban navigation issues ranging from mobile VR
to mobile AR. The rest of the paper is structured as
follows. In section 2, we present background work
while in section 3 we describe the architecture of our
mobile solution and explain briefly the major
components. Sections 4 and 5 present the most
significant design issues faced when building the VR
interface, together with the evaluation of some initial
results. In section 8, we present the initial results of
the development towards a mobile AR interface that
can be used as a tool to provide location and
orientation-based services to the user. Finally, we
present our future plans.
2 BACKGROUND WORK
There are a few location-based systems that have
proposed how to navigate into urban environments.
Campus Aware (Burrell, et al., 2002) demonstrated a
location-sensitive college campus tour guide which
allows users to annotate physical spaces with text
notes. However, user-studies showed that navigation
was not well supported. The ActiveCampus project
(Griswold et al., 2004) tests whether wearable
technology can be used to enhance the classroom
and campus experience for a college student. The
project also illustrates ActiveCampus Explorer,
which provides location aware applications that
could be used for navigation. The latest application
is EZ NaviWalk, a pedestrian navigation service
launched in Japan in October 2003 by KDDI (DTI,
2004) but in terms of visualisation it offers the
‘standard’ 2D map.
On the contrary, many VR prototypes have been
designed for geo-visualisation and navigation. A
good overview of the potentials and challenges for
geographic visualisation has been previously
documented (MacEachren et al., 1999). LAMP3D is
a system for the location-aware presentation of
VRML content on mobile devices applied in tourist
mobile guides (Burigat and Chittaro, 2005).
Although the system provides tourists with a 3D
visualization of the environment they are exploring,
synchronized with the physical world through the
use of GPS data, there is no orientation information.
For route guidance applications 3D City models
have been demonstrated for mobile navigation
(Kulju and Kaasinen, 2002) but studies pointed out
the need for detailed modelling of the environment
and additional route information. To enhance the
visualisation and navigation, a combination of a 3D
representation of a map with a digital map were
previously presented in a single interface
(Rakkolainen and Vainio, 2001, Laakso et al., 2003).
In terms of augmented reality navigation a few
experimental systems have been presented. One of
the first wearable navigation systems is MARS
(Mobile Augmented Reality Systems) (Feiner et al,
1997) which aimed at exploring the synergy of two
promising fields of user interface research: including
AR and mobile computing. Thomas et al, (Thomas
et al., 1998) proposed the use of a wearable AR
system with a GPS and a digital compass as a new
way of navigating into the environment. Moreover,
the ANTS project (Romão et al., 2004) proposes an
AR technological infrastructure that can be used to
explore physical and natural structures, namely for
environmental management purposes. Finally,
Reitmayr, et al., (Reitmayr and Schmalstieg, 2004)
demonstrated the use of AR for collaborative
navigation and information browsing tasks in an
urban environment.
Although the presented experimental systems
focus on some of the issues involved in navigation,
they can not deliver a functional system that can
combine accessible interfaces; consumer devices;
and web metaphors. The motivation of this research
is to address the above issues. In addition, we
compare potential solutions for detecting the user
location and orientation in order to provide
appropriate urban navigation applications and
services. To achieve this we have designed a mobile
platform based on both VR and AR interfaces. To
understand in depth all the issues that relate to
location and orientation-based services, first a VR
MIXED REALITY FOR EXPLORING URBAN ENVIRONMENTS
209
interface was designed and tested as a navigation
tool. Then we have incorporated the user feedback
into an experimental AR interface. Both prototypes
require the precise calculation of the user position
and orientation for registration. The VR interface
relies on a combination of GPS and digital compass
while the AR interface is only dependent on
detecting features belonging to the environment.
3 MOBILE PLATFORM
One of the motivations for this research was to
investigate the technical issues behind virtual and
augmented navigation. At present, we are modelling
the 3D scene around the user and presenting it on
both the VR and AR interfaces. A partner on the
project the GeoInformation Group, Cambridge
(GIG) - provides a unique and comprehensive set of
data, in the form of the building height/type and
footprint data, for the entire City of London. The
urban 3D models are extruded up from Mastermap
building footprints to heights, held in the GIG City
heights database for the test sites in London, and
textures are manually captured using a digital
camera with five mega pixel accuracy. The project
has also access to the unique building height/type
dataset developed for London by GIG and in use
with a range of public and private organisations, e.g.
Greater London Authority. Based on this, a generic
mobile platform for urban navigation applications
and services is prototyped and the architecture is
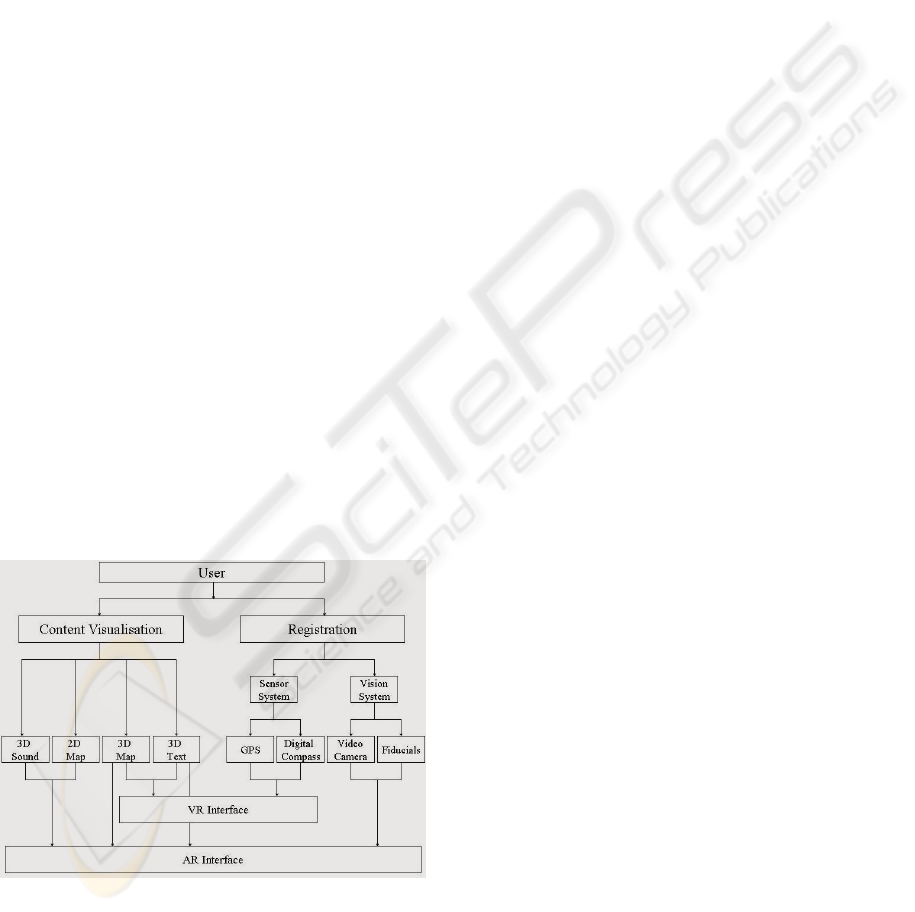
presented in Figure 1.
Figure 1: Architecture of our mobile interfaces.
Figure 1 illustrates how a user can navigate, using
intelligent data retrieval, inside an urban
environment, and what types of digital information,
appropriately visualised, can be provided in the form
of a service. Information visualisation techniques
adopted depends on the digital content used during
navigation. Registration, in this context, includes the
two most significant pieces of information for
calculating the user’s location and orientation: a
sensor system and a vision system which are used as
input to the VR and AR interfaces. The VR interface
uses GPS and digital compass information for
locating and orientating the user. In terms of the
content used for visualisation, the VR interface can
present only 3D maps and textual information. On
the other hand, the AR interface uses the calculated
user’s position and orientation coordinates from the
vision methods to superimpose 2D and 3D maps and
text, on the ‘spatially aware’ framework.
In terms of the software infrastructure used in this
project, both interfaces are implemented based on
Microsoft Visual C++ and Microsoft Foundation
Classes (MFC). The graphics libraries used are
based on OpenGL and VRML. Video operations are
supported by the DirectX SDK (DirectShow
libraries). Originally the mobile software prototype
was tested on a mobile hardware prototype
consisting of a Toshiba laptop computer (equipped
with 2.0 GHz M-processor, 1GB RAM and a
GeForce FXGo5200 graphics card), a Pharos GPS
and a Logitech web-camera. Currently, we are in the
process of porting the mobile platform to Personal
Digital Assistants (PDAs). The final prototype will
build on Mastermap data, stored in GML, with
simple shading applied to the building outlines. The
geographical models will acquire both the
orientation information and the location through a
client API on the mobile device, which will be sent
to the server in the packet-based message
transmitted over the used network. The server will
build and render the scene graph associated with the
location selected and return it to the client for
portrayal.
4 VR NAVIGATION
Navigation within our virtual environment (the
spatial 3D map) can take place in two modes:
automatic and manual. In the automatic mode, GPS
automatically feeds and updates the spatial 3D map
with respect to the user’s position in the real space.
This mode is designed for intuitive navigation. In the
manual mode, the control is fully with the user, and
it was designed to provide alternative ways of
navigating into areas where we cannot obtain a GPS
signal. Also users might want to stop and observe
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
210

parts of the environment – in which case control is
left in their hands.
During navigation, there are minor modifications
obtained continuously from the GPS to improve the
accuracy, which results in minor adjustments in the
camera position information. This creates a feeling
of instability in user, which can be avoided by
simply restricting minor positional adjustments. The
immersion provided by GPS navigation is
considered as pseudo-egocentric because
fundamentally the camera is positioned at a height
which does not represent a realistic scenario. If,
however, the user switches to manual navigation,
any perspective can be obtained, which is very
helpful for decision-making purposes. While in a
manual mode, any model can be explored and
analysed, therefore additional enhancements of the
graphical representation are of vital importance. An
illustrative screenshot of a user testing our prototype
in automatic mode is shown in Figure 2.
Figure 2: User’s view during VR navigation.
One of the problems that quickly surfaced during
the system evaluation is the viewing angle during
navigation which can make it difficult to position the
user. After a series of trial and error exercises, an
altitude of fifty meters over the surface was finally
adopted as adequate. In this way, the user can
visualise a broader area plus the tops of the
buildings, and acquire richer knowledge about their
location, in the VR environment. The height
information is hard-coded when the navigation is in
the automatic mode because user testing (section 6)
showed that it can be extremely useful in cases
where a user tries to navigate between tall buildings,
having low visibility.
5 PRELIMINARY EVALUATION
The aims of the evaluation of the VR prototype
included assessment of the user experience with
particular focus on interaction via movement,
identification of specific usability issues with this
type of interaction, and to stimulate suggestions
regarding future directions for research and
development. A ‘thinking aloud’ evaluation strategy
was employed (Dix et al, 2004); this form of
observation involves participants talking through the
actions they are performing, and what they believe
to be happening, whilst interacting with the system.
This qualitative form of evaluation is highly
appropriate for small numbers of participants testing
prototype software: Dix et al (Dix et al, 2004)
suggest that the majority of usability problems can
be discovered from testing in this way.
The method used for the evaluation of our VR
prototype was based on the Black Box technique
which offers the advantage that it does not require
the user to hold any low-level information about the
design and implementation of the system. The user-
testing took place at City University campus which
includes building structures similar to the
surrounding area with eight users in total (testing
each one individually). For each test, the user
followed a predetermined path represented by a
highlighted line. Before the start of the walk, the
GPS receiver was turned on and flow of data was
guaranteed between it and the ‘Registration’ entity
of the system. The navigational attributes that were
qualitatively measured include the: user perspective,
movement with device and decision points.
5.1 User Perspective
The main point of investigation, was to test whether
the user can understand where they are located in the
VR scene, in correspondence to the real world
position. An examination of the initial orientation
and level of immersion was also evaluated after
minimum interaction with the application and
understanding of the available options. The
information that was obtained by the users was
concerning mainly four topics including: level-of-
detail (LOD), user-perspective, orientation and
field-of-view (FOV).
Most of the participants agreed that the LOD is
not sufficiently high for a prototype navigational
application. Some concluded that texture based
models would be a lot more appropriate but others
expressed the opinion that more abstract, succinct
annotations would help. Both groups of answers can
MIXED REALITY FOR EXPLORING URBAN ENVIRONMENTS
211

fit in the same context, if all interactions could be
visualised from more than one perspective. A
suggested improvement was to add geo-bookmarks
that would embed information about the nature of
the structures or even the real world functionality.
As far as the ‘user-perspective’ attribute is
concerned, each user expressed a different optimal
solution. Some concluded that more than one
perspective is required to fully comprehend their
position and orientation. Both perspectives, the
egocentric and the allocentric, are useful during
navigation for different reasons (Liarokapis et al.,
2005) and under different circumstances. During the
initial registration, it would be more appropriate to
view the model from an allocentric point of view
(which would cover a larger area) and by
minimising the LOD just to include annotations over
buildings and roads. This proved easier to get some
level of immersion with the system but not being
directly exposed to particular information such as
the structure of the buildings. An egocentric
perspective is considered productive only when the
user was in constant movement. When in movement,
the VR interface retrieves many updates and the
number of decision points is increased. Further
studies should be made on how the system would
assist an everyday user, but a variation on the user
perspective is considered useful in most cases.
The orientation mechanism provided by the
application consists of two parts. The first maintains
the user’s previous orientation whilst the second
restores the camera to the predefined orientation.
Some users preferred a tilt angle that points towards
the ground over oblique viewing angles.
Furthermore, all participants appreciated the user-
maintained FOV. They agreed that it should be wide
enough to include as much information, on the
screen, as possible. They added that in the primary
viewing angle, there should be included recognisable
landmarks that would aid the user comprehend the
initial positioning. One mentioned that the
orientation should stay constant between consecutive
decision points, and hence should not be gesture-
based. Most users agreed that the functionality of the
VR interface provides a wide enough viewing angle
able to recognise some of the surroundings even
when positioned between groups of buildings with
low detail level.
5.2 Movement with Device
The purpose of this stage was to explore how
respondents interpreted their interaction with the
device, whilst moving. The main characteristics
include the large number of updates, as well as the
change of direction followed by the user. These are
mainly considered with the issues of making the
navigation easier, the use of the most appropriate
perspective, and the accuracy of the underlying
system as well as the performance issues that drive
the application. Some participants mentioned the
lack of accurate direction waypoints that would
assist route tracking. A potential solution is to
consider the adoption of a user-focused FOV during
navigation using a simple line on the surface of the
model. However, this was considered partially
inadequate because the user expects more guidance
when reaching a decision point. Some participants
suggested to use arrows on top of the route line
which would be either visible for the whole duration
of the movement or when a decision point was
reached.
Moreover, it was positively suggested that the
route line should be more distinct, minimising the
probability of missing it while moving. Some
expressed the opinion that the addition of
recognisable landmarks would provide a clearer
cognitive link between the VR environment and the
real world scene. However, the outcomes of this
method are useful only for registering the users in
the scene and not for navigation purposes. A couple
of participants included in their answers that the
performance of the system was very satisfactory.
The latency that the system supports is equal to the
latency the H\W receiver obtains meaning that the
performance of the application is solely dependent
on the quality of operating hardware. The adaptation
to a mobile operating system (i.e. PocketPC) would
significantly increase the latency of the system.
Moreover, opinions, about the accuracy of the
system, differ. One of respondents was convinced
that the accuracy, provided by the GPS receiver, was
inside the acceptable boundaries, which reflected the
GPS specifications supporting that the level of
accuracy between urban canyons was reflecting the
correspondence to reality, in a good manner. A
second test subject revealed that the occlusion
problem was in effect due to GPS inaccuracy
reasons underlining that when the GPS position was
not accurate enough, the possibility to miss the route
line or any developed direction system increased.
Both opinions are equally respected and highlighted
the need for additional feedback.
5.3 Decision Points
The last stage is concerned with the decision points
and the ability of the user to continue the interaction
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
212

with the system when it reaches them. A brief
analysis of the users’ answers will try to name the
current disadvantages as well as proposed solutions.
As described previously, the user has the feeling of
full freedom to move at any direction, without being
restricted by any visualisation limitations of the
computer-generated environment. Nonetheless, this
intention may provide the exactly opposite result.
The user may feel overwhelmed by the numerous
options that may have and be confused about what
action should take next. At this point, we have to
take under consideration that most users do not have
relevant experience in 3D navigational systems and
after spending some time to understand the
application functionality, they would enhance their
ability to move in the VR environment. To access
user responses more effectively we plan to perform
more testing in the future.
Some users commented that when a decision
point or an area close to it is reached, the application
should be able to manipulate their perspective. This
should help resolving more information about the
current position as well as supporting the future
decision making process. Another interesting point
is that under ordinary circumstances, users should
follow the predefined route. Nevertheless, in
everyday situations the user may want to change
route, in response to a new external requirement.
Partially some of these requirements would be
fulfilled if the user could manually add geo-
bookmarks in the VR environment that would
actually represent points in space with
supplementary personal context. A well-proposed
solution is to include avatars which would depict the
actual position, orientation and simulation of the real
situation. One participant suggested that a compass
object on the screen would be of great assistance for
navigational purposes. This opinion is very
intriguing because it would help solve the occlusion
problem, by pointing towards the final destination or
waypoint. Besides, the adjustment of perspective
would not be necessary because, except the
predefined route line, the user may become capable
of trusting a more abstract mechanism.
6 AR NAVIGATION
The AR interface is the alternative way of
navigating in the urban environment using mobile
systems. Unlike the VR interface which uses the
hardware sensor solution (a GPS component and a
digital compass), the AR interface uses a camera
(with 1.3 megapixels) and computer vision
techniques to calculate position and orientation.
Based on the findings of the previous section and a
previously developed prototypes (Liarokapis, 2005,
Liarokapis et al., 2005), a high-level AR interface
has been designed for outdoor use. The major
difference with other existing AR interfaces, such as
the ones described in (Feiner et al, 1997, Thomas et
al., 1998, Reitmayr and Schmalstieg, 2004, Romão
et al., 2004), is that our approach allows for the
combination of four different types of navigational
information: 3D maps, 2D maps, text and sound. In
addition, two different modes of registration have
been designed and experimented upon, based upon
fudicial and feature recognition. The purpose for this
was to understand two of the most important aspects
of urban navigation: wayfinding and commentary. In
the fiducial recognition mode, the outdoor
environment needs to be populated with fiducials
prior to the navigational experience. Fiducials are
placed in points-of-interest (POIs) of the
environment, such as corners of the buildings, ends
of streets etc, and play a significant role in the
decision making process. In our current
implementation we have adopted ARToolKit’s
template matching algorithm (Kato and Billinghurst,
1999) for detecting marker cards and we try to
extend it for natural feature detection. Features that
we currently detect can come in different shapes,
such as square, rectangular, parallelogram,
trapezium and rhomb (Liarokapis, 2005).
Figure 3: AR navigation using fiducial recognition.
Figure 3, illustrates how virtual navigational tool
(a 3D arrow and a 2D map) can be superimposed on
one of the predefined decision points to aid
navigation. However, user-studies for tour guide
systems showed that visual information could
sometimes distract the user (Burrell, et al., 2002)
while audio information could be used to decrease
the distraction in tour guide systems (Woodruff et
al., 2001). With this in mind, we have introduced a
spatially referenced sound into the interface, to be
used simultaneously with the visual information. For
each POI of our test case scenario, a pre-recorded
MIXED REALITY FOR EXPLORING URBAN ENVIRONMENTS
213

sound file is assigned to the corresponding fiducial.
As the user approaches one, commentary
information can be spatially perceived; the closer the
user the louder the volume of the commentary.
Alternatively, in the feature recognition, the user is
‘searching’ to detect natural features of the real
environment to serve as ‘fiducial points’ and POIs
respectively. Distinctive natural features like door
entrances, windows have been experimentally tested
to see whether they can be used as ‘natural markers’.
Figure 6 shows the display a user navigating in City
University’s campus is presented with, to acquire
location and orientation information using ‘natural
markers’.
Figure 4: Feature recognition (a) using window-based
tracking (b) using door-based tracking.
As soon as the user turns the camera towards
these predefined natural markers, audio-visual
information (3D arrows, textual and auditory
information) can be superimposed (Figure 4) on the
real-scene imagery, thus satisfying some of the
requirements identified in section 5. Depending on
the end-user’s preferences, a specific type of digital
information may be selected to be superimposed.
For example, for visual impaired people it may be
preferred to use audio information rather than visual,
or a combination of the two (Liarokapis, 2005). A
comparison between the fiducial and the feature
recognition modes is shown in Table 1.
Table 1: Fiducial vs feature recognition mode.
Recognition
Mode
Range Error Robustness
Fiducial 0.5 ~ 2 m Low High
Feature 2 ~ 10 m High Low
In the feature recognition mode, the advantage is
that the range of operation is much greater, thus it
can be applied better when wayfinding is the focus
of the navigation. However, the natural feature
tracking algorithm, which is used in this scenario,
does require improved accuracy of the position and
orientation information, as it currently works with a
high error. In contrast, the fiducial recgonition mode
offers the advantage very low error during the
tracking process (i.e. detecting fiducial points).
However, the limited range of operation makes it
more appropriate for commentary navigation modes
rather than for wayfinding. Nevertheless, the
combination of fiducial and feature recognition
modes allows users to perceive both wayfinding and
commentary navigation into urban environments.
7 CONCLUSIONS
Our prototype system illustrates two different ways
of providing location-based services for navigation,
through continuous use of position and orientation
information. Users can navigate in urban
environments using either a mobile VR or a mobile
AR interface. Each system calculates the user’s
position and orientation using a different method.
The VR interface relies on a combination of GPS
and digital compass data whereas the AR interface is
only dependent on detecting features of the
immediate environment. In terms of information
visualisation, the VR interface can only present 3D
maps and textual information while the AR interface
can, in addition, handle other relative geographical
information, such as digitised maps and spatial
auditory information. Work on both modes and
interfaces is in progress and we also consider a
hybrid approach, which aims to find a balance
between the use of hardware sensors (GPS and
digital compass) and software techniques (computer
vision) to achieve the best registration results. In
parallel, we are designing a spatial database to store
our geo-referenced urban data, which will feed the
client-side interfaces as well as routing algorithms,
which we are developing to provide more services to
mobile users. The next step in the project will be to
port our platform to a PDA, which will be then
followed by a thorough evaluation process, using
both qualitative and quantitative methods.
ACKNOWLEDGMENTS
The work presented in this paper is conducted within
the LOCUS project, funded by EPSRC through the
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
214

Pinpoint Faraday Partnership. We would also like to
thank our partner on the project, GeoInformation
Group, Cambridge, for making the entire database of
the City of London buildings available to the project.
REFERENCES
Burigat, S., and Chittaro, L., 2005. Location-
awarevisualization of VRML models in GPS-based
mobileguides, In Proc of the 10
th
International
Conferenceon 3D Web Technology, ACM Press, 57-
64.
Burrell, J., Guy, G., Kubo, K., and Farina, N., 2002,
Context-aware computing: A test case. In Proc of
UbiComp, Springer, 1-15.
Dix, A., Finlay, J.E., Abowd, G.D., and Beale, R., 2004.
Human-Computer Interaction, Prentice Hall, Harlow.
DTI, 2004. Location-based services: understanding the
Japanese experience, Department of Trade and
Industry, Global Watch Mission Report, Available at:
(http://www.oti.globalwatchonline.com/online_pdfs/3
6246MR.pdf)
Feiner, S., MacIntyre, B., Höllerer, T., and Webster, T.,
1997. A touring machine: Prototyping 3D mobile
augmented reality systems for exploring the urban
environment. In Proc of the 1rst IEEE Int. Symposium
on Wearable Computers, October 13-14, 74-81.
Griswold, W.G., et al., 2004. ActiveCampus: Experiments
in Community-Oriented Ubiquitous Computing,
Computer, IEEE Computer Society, October, Vol. 37,
No. 10, 73-81.
Holl, D., et al., 2003. Is it possible to learn and transfer
spatial information from virtual to real worlds. In
Freksa et al. (Eds) Spatial cognition III, Berlin,
Springer, 143-56.
Kato, H., and Billinghurst, M., 1999. Marker Tracking and
HMD Calibration for a Video-Based Augmented
Reality Conferencing System. In Proc. of the 2nd
IEEE and ACM International Workshop on
Augmented Reality, IEEE Computer Society, 85-
94.Klatzky, R. L. (1998) Allocentric and egocentric
spatial representations: Definitions, distinctions, and
interconnections. In C. Freksa, C. Habel and K.
Wender (Eds). Spatial cognition - An interdisciplinary
approach to representation and processing of spatial
knowledge. Berlin, Springer-Verlag, pp. 1-18.
Kray, C., 2001. Two path prepositions: along and past. In
Montello, D. (Ed) Spatial Info Theory, Berlin,
Springer, 263-77.
Kulju, M., and Kaasinen, E., 2002. Route Guidance Using
a 3D City Model on a Mobile Device. In Workshop on
Mobile Tourism Support, Mobile HCI 2002
Symposium, Pisa, Italy, 17
th
Sep.
Laakso, K., Gjesdal, O., and Sulebak, J.R., 2003. Tourist
information and navigation support by using 3D maps
displayed on mobile devices. In Workshop on Mobile
Guides, Mobile HCI 2003 Symposium, Udine, Italy.
Liarokapis, F., 2005. Augmented Reality Interfaces—
Architectures for Visualising and Interacting with
Virtual Information, PhD Thesis, University of
Sussex.
Liarokapis, F., Greatbatch, I., et al., 2005. Mobile
Augmented Reality Techniques for GeoVisualisation,
In Proc. of the 9th International Conference on
Information Visualisation, IEEE Computer Society, 6-
8 July, London, 745-751.
MacEachren, A.M., et al., 1999. Virtual environments for
Geographic Visualization: Potential and Challenges,
In Proc of the ACM Workshop on New Paradigms in
Information Visualization and Manipulation, ACM
Press, Nov. 6, 35-40.
Michon, P-E., and Denis, M., 2001. When and why are
visual landmarks used in giving directions. In
Montello, D. (Ed.) Spatial Information Theory, Berlin,
Springer, 292-305.
Miller, C., and Allen, G., 2001. Spatial frames of reference
used in identifying directions of movement: an
unexpected turn. In Montello, D. (Ed.) Spatial
Information Theory, Berlin, Springer, 206-16.
Mountain, D., Liarokapis, F., Raper, J., and Brujic-
Okretic, V., 2005. Interacting with Virtual Reality
models on mobile devices, In 4th International
Workshop on HCI in Mobile Guides, University of
Salzburg, Austria, 19-22 September.
Rakkolainen, I., and Vainio, T., 2001. A 3D City Info for
Mobile Users. Computer & Graphics, 25(4): 619-625.
Raper, J.F., 2000. Multidimensional geographic
information science, Taylor and Francis, London.
Reitmayr, G., and Schmalstieg, D., 2004. Collaborative
Augmented Reality for Outdoor Navigation and
Information Browsing. In Proc. Symposium Location
Based Services and TeleCartography, Vienna, Austria,
January, 31-41.
Romão, T., Correia, N., et al., 2004. ANTS-Augmented
Environments, In Computers & Graphics, 28(5): 625-
633.
Sholl, J., 2002. The role of self-reference system in spatial
navigation. In Montello, D. (Ed.) Spatial Information
Theory, Berlin, Springer, 217-32.
Siegel, A.W., and White, S.H., 1975. The development of
spatial representation of large scale environments. In
H. Reese (ed.): Advances in child development
andBehaviour, New York: Academic Press, 9-55.
Thomas, B.H., Demczuk, V., et al., 1998. A Wearable
Computer System with Augmented Reality to Support
Terrestrial Navigation. In Proc. of the 2nd
International Symposium on Wearable Computers,
October, IEEE and ACM, 168-171.
Tversky, B., 1981. Distortions in memory for maps.
InCognitive Psychology, 13, 407-433.
Woodruff, A., Aoki, P.M., Hurst, A., and Szymanski,
M.H., 2001. Electronic Guidebooks and Visitor
Attention, In Proc of 6
th
Intl Cultural Heritage
Informatics Meeting, Milan, Italy, Sep, 437-454.
MIXED REALITY FOR EXPLORING URBAN ENVIRONMENTS
215
