
EMG AS A DAILY WEARABLE INTERFACE
Tiago Jo
˜
ao Vieira Guerreiro and Joaquim Armando Pires Jorge
Department of Information Systems and Computer Engineering
INESC-ID / IST, Technical University of Lisbon
R. Alves Redol, 9, 1000-29 Lisbon, PORTUGAL
Keywords:
Electromyography, Interaction, Evaluation, Usability, Accessibility.
Abstract:
We present electromyography as an interface to control computer applications. Our prototype makes possible
for users to control any application through muscle contractions. Electromyographic device portability and
the monitoring possibility for any muscle voluntarily contracted can bring great benefits at the mobility level
as in accessibility issues. Through operating system events emulation and their association with determined
muscle contractions we can replace the pointing device or some keyboard elements, achieving control of any
application.
Usability evaluations validate electromyography as a daily wearable interface where we show that it can be
used even in a mobility context. Considering accessibility, we present a synergy between applications that
ease message writing. Evaluations show that this synergy outperforms existent text-entry interfaces, based on
point and click approaches.
1 INTRODUCTION
We are used to communicate with the computer
through the use of the keyboard, pointer devices or
even by speech. All those paradigms are based on our
senses. The human body is far more active and re-
active than that. It is composed by cells, tissues and
organs which change their behavior when stimulated.
This takes us to the study of physiological signals to
increase our communicative and interactive capabili-
ties. We have focused on electromyographic signals.
Electromyography (EMG) is defined as the study of
the muscular function through the analysis of the gen-
erated electric signals during muscular contractions.
The potential difference obtained in the fibres can be
registered in the surface of the human body through
surface electrodes due to the biological tissues con-
ducting properties.
Our project studies the muscular activityasaninput
in order to control applications. A large set of target
muscles are available so we can interact widely with
the computer. The main goal of the project is to pro-
vide tetraplegic individuals the capability to control
a portable device (specially to be able to write and
send SMS). In order to accomplish this task we mon-
itorize muscle activity through an electromyographic
portable device, process the digital signal and emulate
certain events accordingly to the features detected.
Being able to detect and to evaluate muscular activity
in an individual gives us the possibility to associate
it with determined interface commands, thus having
the myographic signal as input. This kind of interac-
tion can also be useful to full capable individuals in a
hands-busy situation, such as in a presentation or in a
mobility context.
1.1 Related Work
The recurrent and increasing electromyography study
in medicine related areas led to a great scientific in-
vestment to improve the myographic signal acquisi-
tion and analysis process. These advances culminate
with the possibility to use portable electromyographic
devices that communicate via wireless with a process-
ing system. Portability makes it possible for any in-
dividual the transport and use of a EMG device with
great social acceptance (Costanza et al., 2004). EMG
devices portability and reduced size easily conducted
to its use in HCI with work carried through in the area
of Accessibility, Robotics, Mobile Computation and
Recognition of Gestures, among others.
(Roy et al., 1994) present a gesture-based person-
216
Joaõ Vieira Guerreiro T. and Armando Pires Jorge J. (2006).
EMG AS A DAILY WEARABLE INTERFACE.
In Proceedings of the First International Conference on Computer Graphics Theory and Applications, pages 216-223
DOI: 10.5220/0001353102160223
Copyright
c
SciTePress
machine interface for people with serious motor limi-
tations due to cerebral paralysis. This work, based on
gestural recognition with biomechanic and bioelectric
sensors, present many motivating results being capa-
ble to differentiate gestures through the use of neural
networks. In the same scope, (Barreto et al., 1999)
introduce a system that tries to offer the users with
serious motor limitations the possibility to use the
traditional interfaces to point and select. This sys-
tem associates face movements to mouse control, be-
ing sufficiently similar to the system ”Tongue Point”
(Salem and Zhai, 1997) but using myographic signals.
It is still in the accessibility context that (Eriksson
et al., 1998) lean over prosthesis control. Their work
looks for exceeding hand prosthesis existent limita-
tions when compared with the freedom presented by
a full capable hand. The authors show that through the
training of neural networks with a operating hand they
can classify the intention to make movements in the
prosthesis and with that intention they can improve
the prosthesis mechanics.
(Costanza et al., 2004), (Costanza et al., 2005) give
emphasis to the EMG usability evaluating it as a mo-
bile interaction technique.
There are some other relevant projects that use an
EMG device to control mouse, joystick or keyboard or
even a specific application, that influenced positively
the developed work (Benedek and Hazlett, 2005),
(Coleman, 2001), (Crawford et al., 2005), (Jeong
and Choi, 2003), (Manabe et al., 2003), (Rosenberg,
1998), (Surakka et al., 2004), (Tanaka and Knapp,
2002), (Wheeler and Jorgensen, 2003).
Despite of the scope, all the projects refereed in-
tend to present EMG as an input interface. In this
article we present our results and present user stud-
ies to go further and validate electromyographic de-
vices as daily wearable interfaces. Our prototype ac-
complishes the control of various computer applica-
tions and introduces a synergy between applications
that ease the text-entry task. In the next section we
present our approach. The other sections are focused
in the user evaluations, results and discussion. In the
last section we present the conclusions taken by the
user evaluations along with the work still to be done.
2 PROTOTYPE
We present a system where one can control com-
puter applications through muscle contractions. For
that purpose we need to collect the myographic sinal,
process it, extract features and create some sort of ac-
tion. In the following sections we make a detailed
presentation of our work.
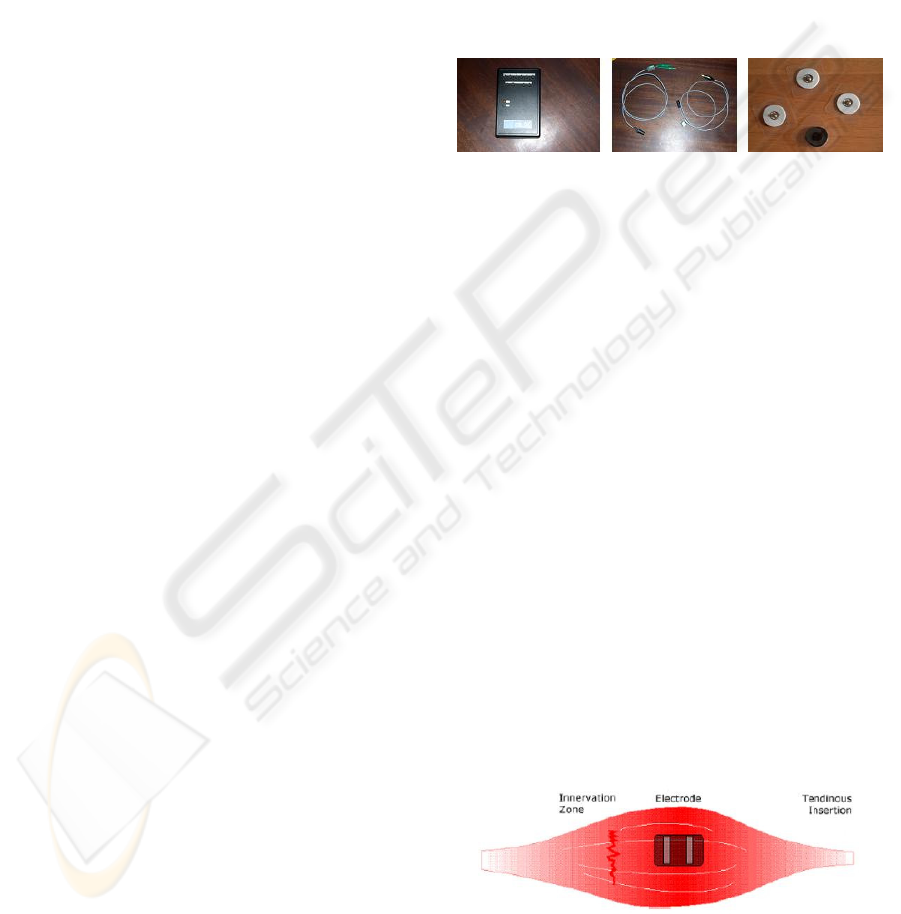
2.1 EMG Portable Device
Our electromyography device collects samples at a
1000Hz sampling rate in 5 independent channels. It
has a 110dB CMRR amplifier and a band pass filter
between 25 and 500 Hz with gain 1000. It is a rela-
tively small device (14cm * 8cm * 4cm) that can be
carried in a belt or pocket.
It is a portable device which communicates by a
bluetooth interface within a 100 meters range. To col-
lect the signals we use surface differential electrodes,
with 1.5 cm radius (Gamboa et al., 2004)
Figure 1: EMG Portable Device.
2.2 Signal Recording
In order to get useful information concerning the mus-
cular activity it is necessary to carefully analyze some
aspects, from technical details at the electrode place-
ment in the surface of the human body to the points
where this placement must be done. Several aspects
influence the signal quality: skin preparation, elec-
trodes placement position, electrodes fixation, elec-
trodes distance and outside interferences (De Luca,
1997).
We have discarded all the skin preparation tech-
niques since we don’t think they are appropriate to
an user interface. Besides, after several tests we ob-
served good signal quality with small interference.
However, to reinforce the surface electrodes adher-
ence we created an elastic band for the neck and two
elastic bands for the forearm.
We used the 2cm distance between electrodes
which guarantees a solution of commitment (Figure
2), collecting the signal of a significant portion of the
muscle and restricting, simultaneously, the undesired
signals to insignificant values (De Luca, 1997).
Figure 2: Electrodes placement.
Basically, the electrodes can monitorize any vol-
untarily contracted muscle. However, the signal fre-
EMG AS A DAILY WEARABLE INTERFACE
217
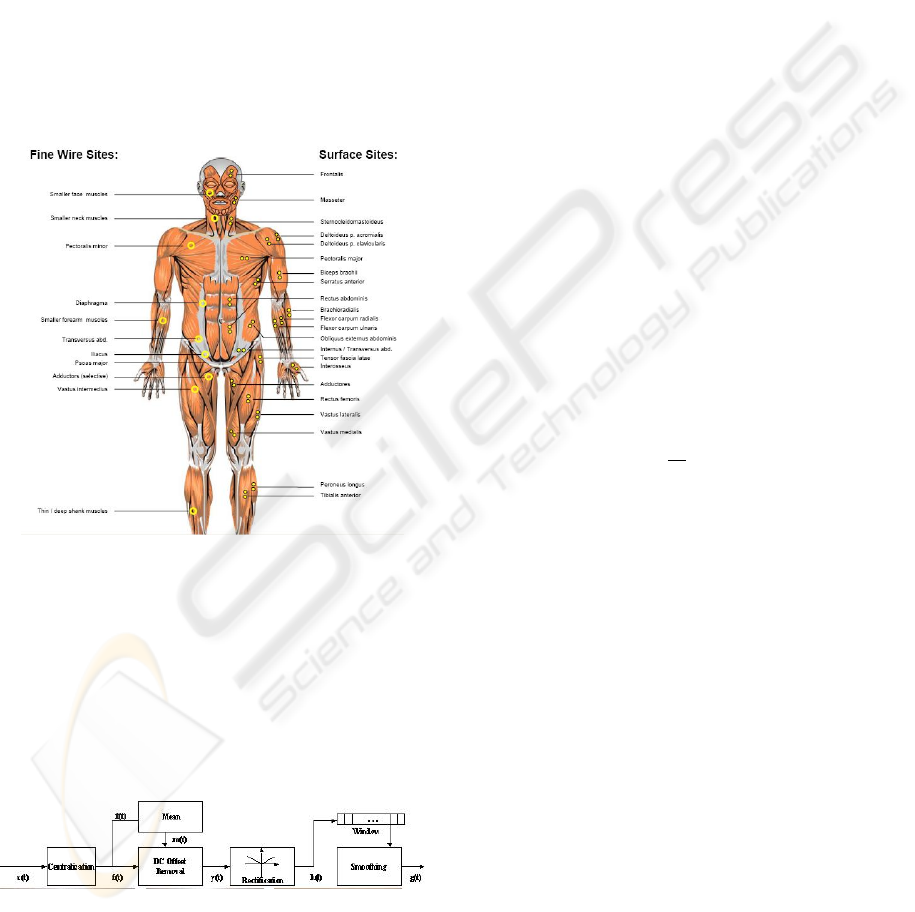
quencies and amplitudes are somehow different be-
tween muscles. Figure 3 presents the electrodes posi-
tion options in a frontal view. It shows surface elec-
trodes placement position in the right side and deeper
needle electrodes positions in the left side. Obviously,
we only use surface electrodes as we are studying a
wearable daily interface and want to keep users far
from pain.
The electrodes shouldn’t be placed in the motor
point where it verifies a damping of the signal low
frequency components. Besides the electrodes place-
ment position it is also important to concern the ori-
entation of the electrodes in relation to muscular fi-
bres (Figure 2). The imaginary line that joins the two
surfaces must be parallel to the muscular fibres orien-
tation.
Figure 3: Electrodes frontal possible positions.
2.3 Signal Processing
In order to extract useful information from the digital-
ized signal we need to process it. Our signal process-
ing module is composed by a pre-processing and a
smoothing phase.
Figure 4: System Design.
The pre-processing is composed by some basic pro-
cedures that prepare the signal to be smoothed. The
signal received from the electromyography device has
a gamma of values between 0 and 4096, having this
to be adjusted, since, really, the signal oscillates be-
tween negative and positive values. The centralization
is a very basic operation and consists of deducting the
base value (2048) from the signal. After that, we add
the value to the set of received values already acquired
and, with the average calculated on these, we calcu-
late and remove the DC offset, normally existent in
EMG signal:
y(t)=f(t) − m(t) (1)
Finally, we rectify the sample. The curve recti-
fication is an operation normally used to allow the
posterior signal integration, since it transforms a
curve with positive and negative values, averaging
zero, in a curve of absolute values, all positives. Two
forms of rectifying the curve exist: eliminating the
negative values (”half-wave rectification”) or adding
them to the positives (”full-wave rectification”)
(Correia et al., 1992). The last process is preferable
since it keeps all the signal energy:
h(t)=|y(t)| (2)
In order to smooth the signal, we carried through an
average on a sliding window, keeping in the output
the same number of collected samples, but now
having in consideration the neighboring” samples:
g(t)=
1
N
w(i) (3)
where N is the window dimension.
We experimentally observed 50 ms as a fine win-
dow dimension value as it keeps the real time impres-
sion and smoothes the signal as desired. Upper values
improve the signal quality but decrease the response
speed. Figure 5 presents the signal evolution through
the referred filters.
2.4 EMG Onset Detection
The projects mentioned in this area have strong pat-
tern classification algorithms that give them great re-
liability but as drawback they need long training ses-
sions for each user. In our work we try to make a sim-
pler approach adaptable instantly to every user with
no training required, which we think is a major ad-
vantage. In order to detect muscle onset we could
use a fixed threshold value but soon questioned this
approach since the activation value is quite different
between different persons, muscles or even in differ-
ent days. It is very difficult to keep the exactly same
setup. Our system detects onset detection with an ap-
proach where threshold is estimated as a multiple h of
standard deviations (Staude et al., 2001).
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
218
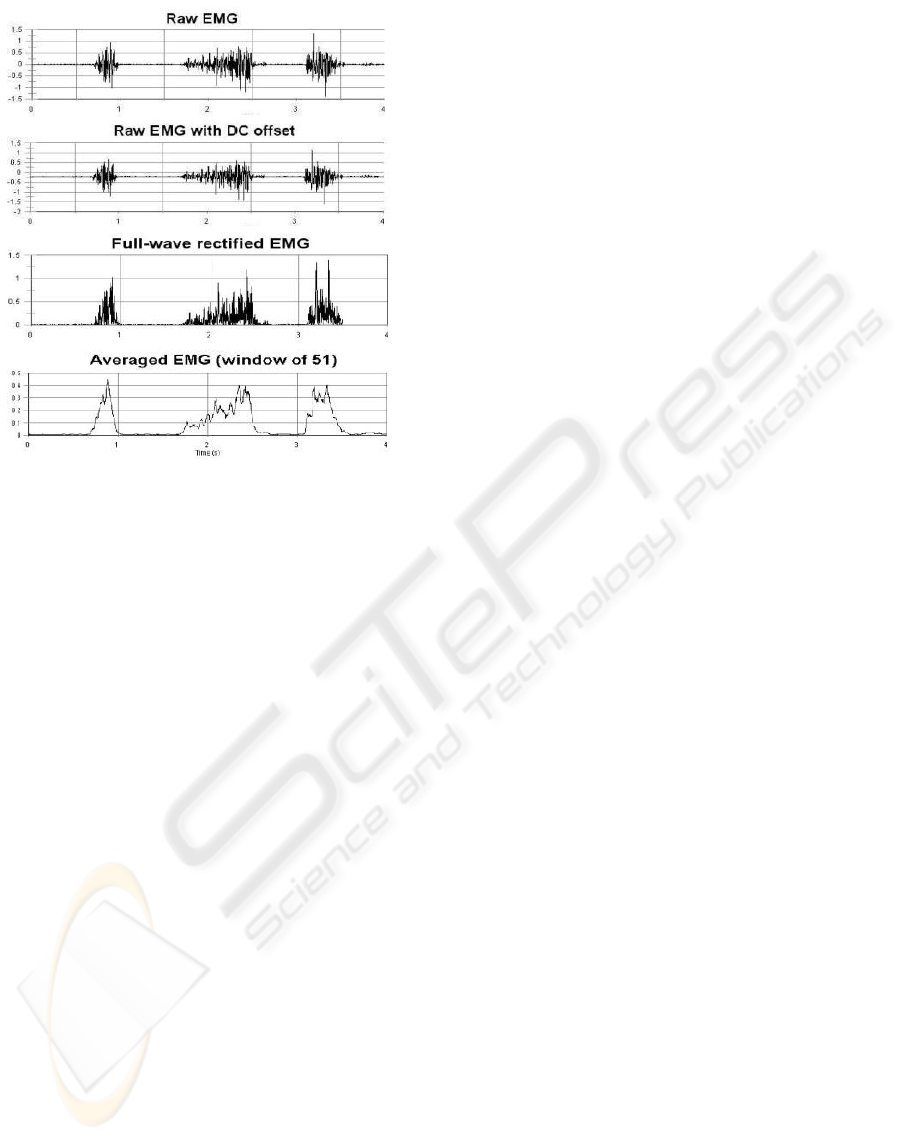
Figure 5: Signal Processing.
2.5 Event Generation
Instead of keeping our application enclosured we
thought it would be advantageous to be able to con-
trol any computer application with the interface cre-
ated. With that purpose, our prototype acts like a
background monitor that processes the signal and as
muscle activations are detected it launches operating
system events (mouse movements, mouse clicks or
keyboard events). The user can set up the events for
any input channel. As we simulate operating system
input events they can be used in any active applica-
tion. With this system we can control the ”Desk-
top”, open applications, work within those applica-
tions, and change between them, as long as they have
a limited number of input events. It can actually be
used in a Linux or Windows desktop. Full desktop
control is achieved.
3 METHODOLOGY
We conducted several experiments to assess the us-
ability of myographic activity as as interaction modal-
ity. For that purpose, besides the experiments to vali-
date the interaction speed and accuracy, we focused
our attention in the interface robustness as a daily
wearable interface.
3.1 Speed and Accuracy
In order to evaluate the speed and accuracy of our pro-
totype and validate EMG as an input interface we de-
veloped a simple test application. It is quite similar to
the one used by (Barreto et al., 1999) and consists in
a point and click timed exercise. The setup is created
with enough electrodes to emulate mouse moving di-
rections and left-click.
We developed a simple OpenGL application with
a Start Button (presented in a corner position) and a
Stop button presented in the middle of the screen. The
experiment consists in:
a) Clicking Start Button, where a timer is activated;
b) Moving the cursor towards the Stop button, with
any trajectory;
c) Clicking Stop Button, and the time is presented
to the user and saved.
The Start Button dimensions are always 8,5 x
8,5mm but there are four Stop Button dimensions (8.5
x 8.5mm; 12.5 x 12.5mm; 17 x 17mm; 22 x 22mm).
We made 80 evaluations, 20 of each for every Stop
Button size. The Start Button changed between the
four corners.
The users were equipped with two pairs of elec-
trodes in each forearm (four directions) and another
pair near one eye to detect blinking (click emulation).
3.2 Wearability
(Costanza et al., 2005) give relevance to EMG tech-
nology in the context of the mobile computation men-
tioning it as a subtle interface translated in a great so-
cial acceptance. They are based on the fact that in-
dividuals who use the system are able to interact pri-
vately without disrupting the environment that encir-
cles them. This work is mentioned by the motiva-
tional ideals related to the use of EMG with mobile
devices. It evaluates the EMG usability while walk-
ing and making contractions of different durations.
However, (Costanza et al., 2005) use only one input
channel for simple subtle intimate response events.
Our evaluation method tries to validate EMG wear-
ability and mobility but with a more complex proto-
type where there are several monitorized input chan-
nels/muscles and several corresponding actions previ-
ously selected. The aim of this experiment is to eval-
uate if the system responds as it is expected even in
standing and walking conditions.
To evaluate the system’s correct response we de-
signed a walking circuit (similar to Constanza’s)
which the user has to follow as he responds to orders.
Several variants were tested from the Walking with no
contractions setup to the walking with 4 contractions
involved. The variations are:
• Walking with no contractions.
EMG AS A DAILY WEARABLE INTERFACE
219

• Standing with stimulus response.
• Walking with stimulus response.
The users were equipped with two pairs of elec-
trodes in each forearm (four directions) and another
pair in one eye’s zone (click). Another setup was cre-
ated with one pair of electrodes in each side of the
neck (Figure 6). The first setup is directed to mobility
issues as the second is directed to quadriplegic users.
Figure 6: Electrodes placement.
3.3 Daily Control
Electromyography can bring great benefits in situa-
tions where the traditional input devices are not avail-
able. They could be unavailable due to individuals
impairments or to the situation context.
Concerning accessibility, we can look at EMG as
a wide alternative since it can explore any voluntarily
contracted muscle. Thinking in quadriplegic,i.e. we
can attach surface electrodes to their neck and make
possible a pointer control in a computer.
Concerning full capable individuals in a hands-
busy context we can look at EMG as an alternative
to control a mobile device.
There are great benefits in EMG as a daily control
interface but we need to validate its use. To evaluate
the continuous use of our prototype (several hours)
we asked the users to control the pointer device in the
computer with muscle contractions. With that pur-
pose and to detect any failure we removed the user’s
regular pointing device.
The users were asked to interact freely with the
computer for two hours. We asked for regular activ-
ity demanding several movements and clicks. This
experiment evaluates the prototype’s usability and the
EMG signal quality in a large time-scale.
This evaluations were performed with the two elec-
trodes placement setups already refereed (forearm
and neck).
3.4 Dasher and Accessibility
The main goal of our research around electromyo-
graphy is to provide a writing mechanism for
quadriplegic users. This capability will be merged
with the control of mobile devices main tasks. In gen-
eral, projects around EMG bet in a point and click
approach, which is inappropriate to the writing activ-
ity (very slow). We purpose a synergy between ap-
plications where a pointer is continuously controlled
by myographic activity, which appears to be a faster
and efficient approach. Dasher (Ward et al., 2000) is
a text-entry interface based in a zooming technique.
This application was developed considering situations
or users associated with an incapability to write in
a keyboard. The user basically navigates in a ”sea
of letters” which appear accordingly to word predic-
tion techniques. It allows two-dimensional and one-
dimensional control.
Figure 7: Dasher Application.
The users were asked to write the sentence ”Dasher
is a fine text entry interface and I enjoy it”. This eval-
uations were performed with the forearm setup and
neck setup (Figure 8) with only two electrodes as the
application gives the one-dimensional control possi-
bility.
We also tested the forearm position setup and asked
the users to write the sentences using Windows On-
Screen Keyboard to compare our synergy navigation
application with point and click approaches. We used
the same goal sentence.
4 RESULTS
The tests were carried through in a Pentium IV
portable computer, with 512 MB RAM and a 17”
color monitor. To collect the real time signal we
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
220
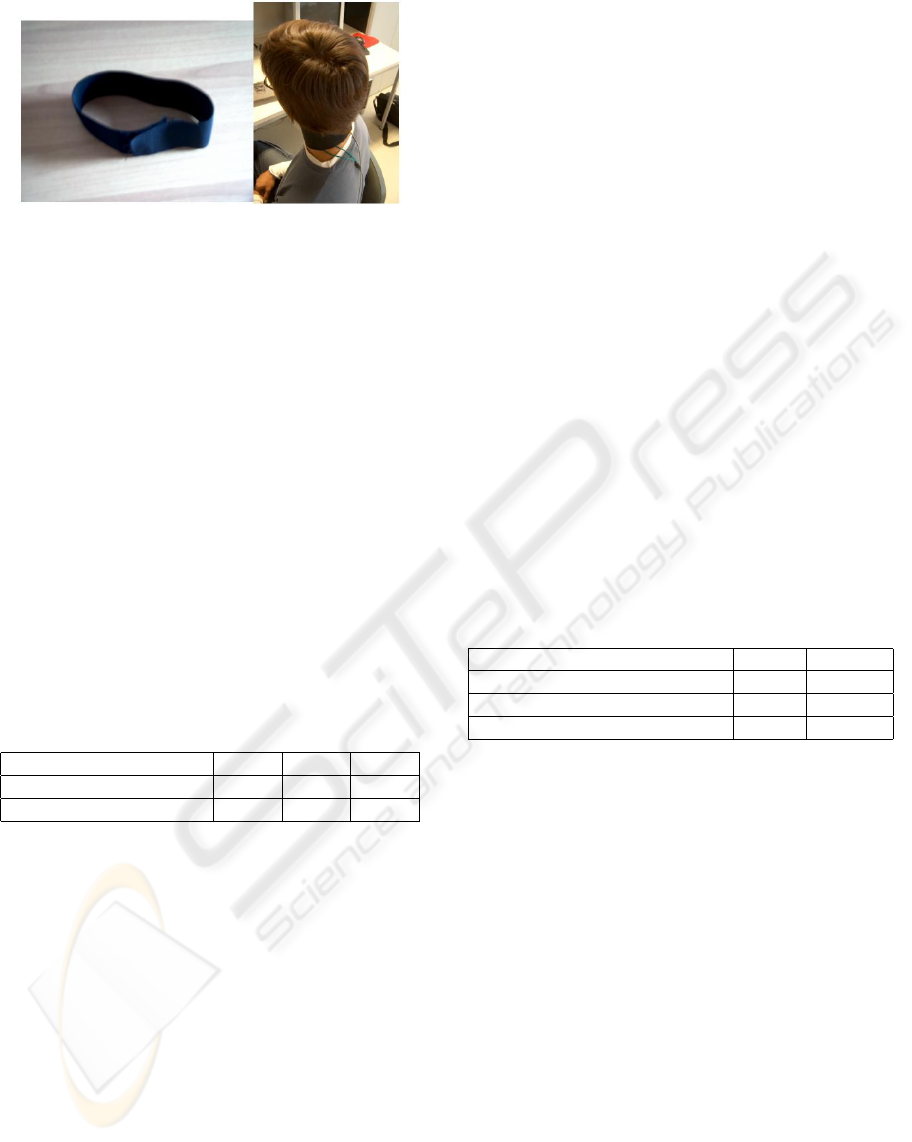
Figure 8: Neck Elastic Band.
used the electromyographic device described in Sec-
tion 2.1.
The system was tested with three subjects, with 19,
24 and 51 years. All of them were used to deal with
computers. The studies took several hours with each
user because we needed to test the system and the
paradigm robustness. The presented results are also
preliminary as we want to focus our development in
accessibility, and so further user evaluations will be
effectuated with tetraplegic individuals.
4.1 Speed and Accuracy
Table 1 shows the average values taken for each sub-
ject to complete the 80 trials. The subjects required
an average of 7.5 seconds to achieve the experience
goal.
Table 1: Speed and Accuracy trial times.
Subject 1 2 3
Average Trials Time (s) 7.505 6.982 7.903
Standard Deviation 2.805 2.345 3.014
Before the experiment the users familiarized with
the system for two minutes. Familiarization was a
very fast task since the users understood the relation
with the mouse movements normally executed.
This experiment gave the users the necessary con-
trol of the device to complete further evaluations.
4.2 Wearability
This experience intended to test the system in stand-
ing and walking conditions while responding to voice
impulses. The users were already familiarized with
the system due to first experiment trials.
One of the users had one false positive in the Walk-
ing with Stimulus Response task. The other two had
no false positives. The false positive was due to wire
misplacement. No false negatives were detected in
any of the users’ experiments.
4.3 Daily Control
The results to this test are only qualitative. The users
achieved total control of the interface and performed
their usual tasks (Web Browsing, Messaging, Docu-
ment Opening and Closing,...). Some of them noticed
mouse right-click missing. They also noticed a lack
of productivity since they couldn’t get the same per-
formance as in their usual interaction mode. However,
the users were impressed with the control achieved by
the interface and found it usable. In the pos-analysis
we noticed an improvement of the signal quality (less
noise).
4.4 Dasher and Accessibility
The experiment results are presented in Table 2. In
order to understand the evaluation we need to define
exactly the meaning of every metric:
• Error: an error is detected when the user misses a
letter and has to come back. Some of these errors
may be users fault, i.e. skipping a letter or a space
by distraction.
• Time: time until the user ends his sentence cor-
rectly.
Table 2: Average Text-entry trial results.
Task Errors Time(s)
Dasher/Forearm 0.00 124
Dasher/Neck 0.33 200
On-Screen Keyboard/Forearm 0.33 480
All the users succeeded and were capable to write
the entire message. The errors detected were related
to user’s distraction, i.e. skipping letters and having
to go back in the writing. There were no errors in
the forearm control + Dasher task. One of the users
made an error in the neck control (missed a letter) but
was capable to go back and complete the trial. We had
one error in the On-Screen Keyboard (hitting between
letters).
5 DISCUSSION
The results obtained in the several experiments
present Electromyography as an alternative interface
to the traditional ones.
Our approach seems to be quite efficient compared
to others, i.e. in the Speed and Accuracy test we
duplicated an experiment already made by (Barreto
et al., 1999) and the results are quite better. The sub-
jects in our trials required around 7.5 seconds to move
the cursor from the corner button to the center button
EMG AS A DAILY WEARABLE INTERFACE
221

and performing a Left-Click as Barreto had an aver-
age result of 16 seconds. One of Barreto’s suggestion
was to use the prototype with On-Screen Keyboard
to entry text. We presented a synergy between ap-
plications that outperforms the On-Screen Keyboard
scenario: our approach averaged 124 seconds against
480 seconds in the keyboard. Both the Speed as the
Dasher results are quite interesting and present elec-
tromyography as an auxiliary interface for impaired
individuals. These tests included the writing through
neck movements which were successful. Electromyo-
graphic interaction is an opportunity for tetraplegic
individuals and we improve this opportunity with a
faster and accurate approach.
Our test users used the system for hours and eval-
uated its daily utilization. Even if it is slower than
their normal input devices it is certainly viewed with
another enthusiasm by people incapable of using key-
board or normal pointing devices. Nowadays, eye-
trackers already provide this kind of control for users
with special needs but, although they present a faster
movement of the cursor, they also present serious lim-
itations like the difficulty to accurately control the
cursor, or its loss of calibration during use. The
cost of an Eye-tracker is also a disadvantage when
compared with an electromyographic device (Barreto
et al., 1999). The system becomes even more interest-
ing when we analyze the scenario where a tetraplegic
user in his wheelchair and wants to make a call from
his cell phone or any other task in a mobile device.
The displays are way to small for any tracker and an
alternative is required.
To validate electromyography as an input device
we had to evaluate it in a wearable basis. Wether in
Accessibility (in a wheel chair) or in Mobility issues
(Walking while controlling some kind of application
in a mobile device) the system is subjected to various
movements. We conclude by our experiments that as
long as the montage is made carefully and the wires
are fixated the system acts as expected. This is a par-
ticularly lesser problem with tetraplegic users as their
motor capabilities are reduced.
6 CONCLUSIONS
This paper presents EMG as a daily wearable inter-
face. We presented a prototype where users can con-
trol computer applications through muscle contrac-
tions.
Our evaluations revealed the prototype as a fast
and accurate input interface alternative. We have also
shown that EMG can be used continuously even in
a mobile context without unexpected behavior. This
characteristic potentiates the joint use of electromyo-
graphy with mobile devices in order to work in a
hands-busy situation or to interact without disrupting
the surrounding environment.
We have also presented a synergy between our pro-
totype and Dasher that eases the text-entry function.
This is a major contribution for users with special
needs. The capability to monitorize any voluntarily
contracted muscle gives us the ability to adapt the sys-
tem to several impaired individuals and their special
needs.
6.1 Future Work
Our work will continue with the migration of the
prototype to a mobile device. We intend to con-
tinue our development in the Accessibility area, fo-
cusing on quadriplegic individuals. Our goal is to give
quadriplegic the basic control of a cell phone, includ-
ing messaging, with and EMG device and a mobile
device attached to a wheel chair. Further user studies
will be executed in that context.
We also intend to make efforts in the signal
processing so we can recognize more movements
with the same monitorized muscles. This will im-
prove the interaction possibilities and number of em-
ulated events.
REFERENCES
Barreto, A. B., Scargle, S. D., and Adjouadi, M. (1999). A
real-time assistive computer interface for users with
motor disabilities. SIGCAPH Comput. Phys. Handi-
cap., (64):6–16.
Benedek, J. and Hazlett, R. (2005). Incorporating facial
emg emotion measures as feedback in the software de-
sign process. Technical report, Microsoft Corporation,
Johns Hopkins University School of Medicine.
Coleman, K. (2001). Electromyography based human-
computer-interface to induce movement in elderly
persons with movement impairments. In WUAUC’01:
Proceedings of the 2001 EC/NSF workshop on Uni-
versal accessibility of ubiquitous computing, pages
75–79, New York, NY, USA. ACM Press.
Correia, P. P., Mil-Homens, P., Veloso, A., and Cabri, J.
(1992). Estudo da funo neuromuscular com recurso
electromiografia: desenvolvimento e fundamentao de
um sistema de recolha e processamento. Technical
report, Faculdade de Motricidade Humana.
Costanza, E., Inverso, S. A., and Allen, R. (2005). To-
ward subtle intimate interfaces for mobile devices us-
ing an emg controller. In CHI ’05: Proceedings of the
SIGCHI conference on Human factors in computing
systems, pages 481–489, New York, NY, USA. ACM
Press.
Costanza, E., Perdomo, A., Inverso, S. A., and Allen, R.
(2004). Emg as a subtle input interface for mobile
computing. In Mobile HCI, pages 426–430.
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
222

Crawford, B., Miller, K., Shenoy, P., and Rao, R. (2005).
Real-time classification of electromyographic signals
for robotic control. In AAAI, pages 523–528.
De Luca, C. J. (1997). Surface electromyography: Detec-
tion and recording. Technical report, Delsys Inc.
Eriksson, L., Sebelius, F., and Balkenius, C. (1998). Neural
control of a virtual prosthesis. In Perspectives in
Neural Computing: Proceedings of ICANN ’98.
Gamboa, H., Silva, H., Viegas, V., and Fred, A. (2004).
Wireless physiologic data acquisition platform. Tech-
nical report, IT, Technical Superior Institute.
Jeong, H. and Choi, J. (2003). An emg-controlled graphic
interface considering wearability. In INTERACT.
Manabe, H., Hiraiwa, A., and Sugimura, T. (2003). ”un-
voiced speech recognition using emg - mime speech
recognition”. In CHI ’03: CHI ’03 extended abstracts
on Human factors in computing systems, pages 794–
795, New York, NY, USA. ACM Press.
Rosenberg, R. (1998). The biofeedback pointer: Emg con-
trol of a two dimensional pointer. In ISWC, pages
162–163.
Roy, D. M., Panayi, M., Erenshteyn, R., Foulds, R., and
Fawcus, R. (1994). Gestural human-machine interac-
tion for people with severe speech and motor impair-
ment due to cerebral palsy. In CHI ’94: Conference
companion on Human factors in computing systems,
pages 313–314, New York, NY, USA. ACM Press.
Salem, C. and Zhai, S. (1997). An isometric tongue point-
ing device. In CHI ’97: Proceedings of the SIGCHI
conference on Human factors in computing systems,
pages 538–539, New York, NY, USA. ACM Press.
Staude, G., Flachenecker, C., Daumer, M., and Wolf, W.
(2001). Onset detection in surface electromyographic
signals: A systematic comparison of methods. Jour-
nal on Applied Signal Processing, 2:67–81.
Surakka, V., Illi, M., and Isokoski, P. (2004). Gazing and
frowning as a new human–computer interaction tech-
nique. ACM Trans. Appl. Percept., 1(1):40–56.
Tanaka, A. and Knapp, R. B. (2002). Multimodal interac-
tion in music using the electromyogram and relative
position sensing. In NIME ’02: Proceedings of the
2002 conference on New interfaces for musical ex-
pression, pages 1–6, Singapore, Singapore. National
University of Singapore.
Ward, D. J., Blackwell, A. F., and MacKay, D. J. C. (2000).
Dasher - a data entry interface using continuous ges-
tures and language models. In UIST, pages 129–137.
Wheeler, K. R. and Jorgensen, C. C. (2003). Gestures as
input: Neuroelectric joysticks and keyboards. IEEE
Pervasive Computing, 2(2):56–61.
EMG AS A DAILY WEARABLE INTERFACE
223
