
MTR: THE MULTI-TASKING ROVER
A New Concept in Rover Design
Antonios K. Bouloubasis, Gerard T. McKee, Paul M. Sharkey, Peter Tolson
Active Robotics Laboratory, School of Systems Engineering, University of Reading,
Whiteknights, Reading, RG6 6AY, UK
Keywords: Mobility, Internal/External Re-configurability, Modularity, Upgradeability.
Abstract: In this paper we present the novel concepts incorporated in a planetary surface exploration rover design that
is currently under development. The Multitasking Rover (MTR) aims to demonstrate functionality that will
cover many of the current and future needs such as rough-terrain mobility, modularity and upgradeability.
The rover system has enhanced mobility characteristics. It operates in conjunction with Science Packs (SPs)
and Tool Packs (TPs) – modules attached to the main frame of the rover, which are either special tools or
science instruments and alter the operation capabilities of the system.
1 INTRODUCTION
On July 4, 1997 a new era for space robotics and the
exploration of Mars began when the Pathfinder
mission successfully delivered the Sojourner rover
to the Red Planet. Following that, in 2005 the two
MER rovers, Spirit and Opportunity, traversed many
kilometres and took hundreds of pictures giving
much more information than their ancestor. All three
missions are the initial phase of a plan with the
ambition of the eventual human habitation of Mars.
So far the increasing numbers of missions to
Mars have provided important information about the
Martian climate and geology. Scientists are using
this information to locate areas of interest in the
surface of the planet and following that, robotic
rovers can be deployed to obtain ground truth
(NASA Mars Exploration Study Team, 1998). Areas
of interest are often very difficult to reach requiring
a rover to have increased rough terrain mobility
capabilities (Schenker, et al, 2000). The return of
samples to Earth for further examination with
equipment which is too sensitive to be sent to space
is also necessary (Garvin, 2003),
(Huntsberger, et al,
1999). After a number of sites have been evaluated,
the best in terms of recourses and topographic
location will be selected for the construction of
habitats to support human presence on the Red
Planet. Mobile rovers will be used throughout these
missions.
In order to carry out the tasks mentioned above,
different robotic mechanisms and rover designs need
to be employed. In this paper we propose a novel
new concept for robotic rovers, namely the Multi-
Tasking Rover (MTR). The idea behind the design
of the MTR is the fusion of all these systems into
one. This is accomplished with the construction of a
main rover system (Fig. 1), with enhanced mobility
and re-configuration capabilities, which will be the
carrier of different modules each dedicated to a
specific task. The rover will not only offer mobility
to these modules, but in combination with a
particular module will acquire unique characteristics
transforming its role and functionality. The modules
can be either Science Packs (SPs) or Tool Packs
(TPs) - the current design supports the deployment
of two Packs on each MTR.
For example a Science Pack can be a particular
type of spectrometer and a Tool Pack a scoop
mechanism. A scenario could be the transportation
Figure 1: The Multi-Tasking Rover. (MTR).
176
Bouloubasis A., Mckee G., Sharkey P. and Tolson P. (2006).
MTR: THE MULTI-TASKING ROVER - A New Concept in Rover Design.
In Proceedings of the Third International Conference on Informatics in Control, Automation and Robotics, pages 176-181
DOI: 10.5220/0001218401760181
Copyright
c
SciTePress

of the packs to a selected site, the acquisition of
samples using the scoop and in situ testing by the
spectrometer. Now assume that samples are needed
from a particular depth under the Martian surface.
The MTR will re-configure by placing the
Spectrometer and the Scoop Packs to a storage
location, pick-up two TPs, a robotic mole and a
deployable solar panel, move them to the desired
location, deploy them, connect them such that the
solar panels provide power continuously to the
robotic mole and leave them to that location until the
samples are taken.
The MTR approach assumes that the packs
have in-built control systems and can operate once
deployed independently from the rover.
Communication links between the packs and the
MTR will be established when required. The
advantage of this approach is that instead of sending
a large number of different rovers to perform a
variety of tasks, a smaller number of MTRs could be
deployed with a large number of different SPs and
TPs, offering greater functionality at a reduced
payload.
The remainder of the paper is organized as
follows. Section II describes the electromechanical
design of the MTR system. Section III outlines the
rover electronic and sensory systems. Section IV
gives a description of the behaviours that will be
implemented and the architecture, under which they
will be integrated. Finally, section V provides a
summary and conclusions.
2 ELECTROMECHANICAL
SYSTEMS
A key element in the development of a modular, re-
configurable, multitasking system like the MTR is
the development of complex mechanisms that will
enable the principles of operation to be
demonstrated. The MTR requires a total of 14
motorized actuators. It comprises of the following
subsystems: drive/steering system, active suspension
and base unit. An SP and/or a TP will be constructed
as well so that fundamental principles of operation
are demonstrated. According to the nature of the
Pack, this may introduce further axes of control. A
stereo camera system will also be integrated in the
design at a later stage.
The four-wheeled rover will achieve a
maximum speed of 7cm/sec, which is delivered
through a motor/gearbox combination incorporated
within each wheel. The aluminium wheels measure
175mm in diameter and the rims are covered with a
rubber tire for maximum traction. Each of the
wheels is independently steered giving the rover the
highest mobility possible. The MTR can traverse
forward/backward, turn on the spot, take hard/soft
turns and crab to any direction maintaining the
orientation of the body. The rotation of each of the
wheels is restricted to ±185 degrees by limit
switches.
Figure 2: Demonstrating internal re-configurability of the
Carrier.
The Active Suspension Mechanism (ASM)
serves as means of not only providing rough terrain
stability, by re-allocating the vehicle’s centre of
mass (Figure 2), but also gives the basic mobility to
the main body for reaching, grasping and deploying
any of the Science/Tool Packs that need to be
employed for a given task. The ASM comprises of a
pair of shoulders and each of these in turn comprises
a pair of legs; at the end of each leg is a steerable
wheel. Each shoulder’s angle is adjustable between
0 to 188 degrees allowing the main body to move
up/down (300mm travel) and modify its roll angle
(±26 degrees). This is accomplished using a linear
actuator located within each leg. If so desired the
shoulder’s angle can be adjusted by altering the
configuration of only one of the legs.
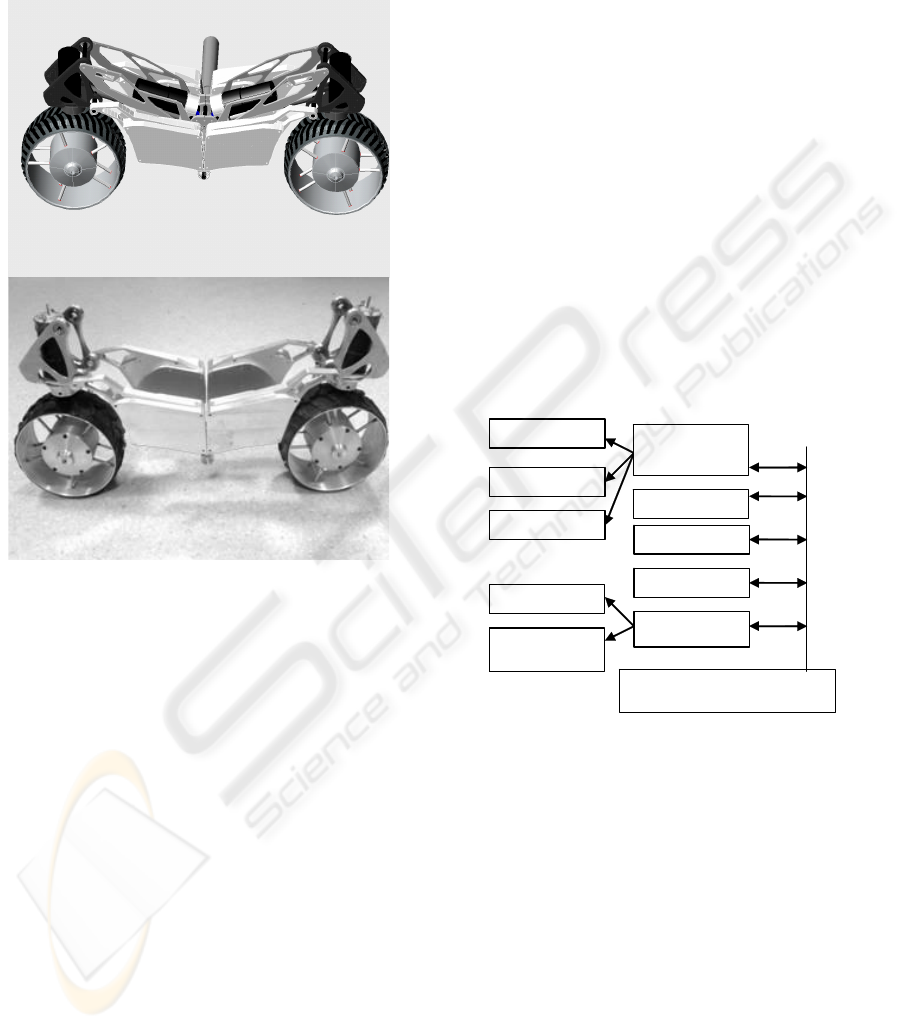
Figure 3a, illustrates a 3-D model one of the
shoulders fully extended (lower position) and Figure
3b shows an assembly of all of the parts that have
been made to date. This configuration gives unique
motion characteristics to the rover’s body, enhancing
internal re-configurability. Each leg also houses a
Lithium-Polymer (Lipoly) battery and the associated
low-level controller. The four Lipoly packs situated
on the legs in conjunction with four more located
inside the chassis of the MTR give a total power
capacity of 22V at 9 Ah.
The topology of the MTR’s suspension is similar
to that of JPL’s SRR2K (Schenker, et al, 2000), but
configuration and functionally differ greatly. The
two shoulders are linked via an active differential
drive mechanism in order to obtain contact of all
four wheels with the ground. This is accomplished
with the Main Frame Rotation Mechanism (MFRM).
The main body resides between the two shoulders,
houses the differential mechanism, the on-board
high level controller and provides means of support
for the deployment of two Packs. The axis that links
MTR: THE MULTI-TASKING ROVER - A New Concept in Rover Design
177
the two shoulders through the differential is also the
axis of rotation of the body. The MFRM comprises
two actuators which provide the ability to adjust the
pitch angle (±720 degrees rotation) of the body
.a
.b
Figure 3: Three-dimensional model of the ‘shoulder’ (a),
and the parts that have been currently made (b).
of the MTR in order to maintain a constant
orientation to the horizontal when needed. The
MFRM mechanism also offers centre of mass re-
allocation for extra stability and body pitch angle
adjustment for the sake of operation of any Packs (a
TP might have to operate vertically or at an angle
e.g. a drill). Finally the MFRM gives the ability to
the main frame to pick-up a Pack no matter its
orientation; the roll angle can be controlled via the
suspension and the yaw angle can be determined
through the steering/drive system. Twelve actuators
in total control the subsystems mentioned above.
The mechanisms or instruments that can be
incorporated within a Pack are limited by the
maximum allowable size of the Pack and the
lifting/transportation capability of the MTR. The
maximum volume for a Pack is limited to 5litres and
its weight should not exceed 3kgs. Nonetheless this
configuration offers great external re-configurability
since an appreciable number of devices can be
deployed within the given constraints.
The MTR provides a set of mounting points on
its body to support two Packs. In order to simplify
the MTR design, each Pack encapsulates a locking
mechanism, necessary for stabilising it on the
rover’s body. Another advantage is the
upgradeability of the system since by sending new
Packs future needs of space exploration can be
satisfied. An absolute necessity is of course a
standard interface between the MTR and the
modules.
3 ELECTRONICS AND SENSING
The electronics system comprises two subsystems.
The first, the low-level controller, is built around the
Microchip PIC controller and a number of different
peripherals. It has the responsibility of motor PID-
servo control, as well as obtaining the sensors’
feedback to be utilised by local, low-level
behavioural loops, or the higher-level controller (the
second subsystem) when necessary.
SUSPENSION
DRIVE
Leg #4
Leg #2
Leg #3
Body Controller
High Level Controller
Leg #1
Controller
MFRM
Pack Alignment
Sensors
STEERING
RS485
Figure 4: Electronic & Electromechanical Subsystems on
the Carrier.
Modularity is a key design goal. The low-level
controller is divided into five smaller subsystems.
Each leg will comprise a small network of five PICs,
three motion controllers and two additional general
purpose controllers that will be used for functions
like A/D conversion, sonar reading and other low-
level functions that may be required. The 5
th
subsystem is located in the body of the MTR and
will be in charge of the actuators that govern the
operation of the MFRM (active differential and body
rotation). This controller will provide all the
necessary feedback for alignment of the MTR with
respect to a Pack.
The second subsystem, an on-board high-level
controller, will be connected with all the modules
ICINCO 2006 - ROBOTICS AND AUTOMATION
178

through an RS485 bus allowing a sufficiently large
number of devices to be part of the loop. The
platform that will be employed to perform the high-
level control functions is still under investigation.
The options range from the Nano-ITX and the
Soekris, to the very small Gumstix. The basic
topology of the high and low-level controllers,
together with the main electromechanical systems is
shown in Figure 4.
A Pack can have a controller of equivalent or
higher processing power, as the situation and
functionality demands. De-centralized control has
been the basis for fast response through parallel
processing and is not limited within the physical
boundaries of the MTR. If more processing power is
Figure 5: The Complete System.
required in order to carry out a given task, it can be
obtained from a TP/SP with enhanced processing
capabilities. A wireless Ethernet connection will
offer a fast data communication path between the
Control Station, the MTR and any of the Packs
(Figure 5).
A variety of different sensors must be employed
so as to obtain all the required feedback and assist
the function of the two subsystems. Two-channel
quadrature encoders will be employed for the PID
control of the rotating elements. Temperature
sensors will inform the controllers on the status of
the motor driver chips and current sensing will
provide the necessary force feedback. Strain gauges
incorporated within the steering system of each
wheel will monitor the contact forces with respect to
the ground and assist the operation of rough terrain
stability behaviours.
Sonar sensors, also based on the steering
brackets, as well as on the MTR’s body, will utilize
the pan rotation of the wheels and the tilt rotation of
the frame (MFRM) to support obstacle avoidance
behaviours. A two-axis inclinometer will provide
feedback on the roll and pitch of the vehicle. A pair
of GPS receivers will be employed (one on the MTR
and one on the Pack) in order to obtain rough
estimates for the position of the vehicle with respect
to the Pack. An RF receiver on the MTR will work
in combination with an RF transmitter on the Pack to
enable it to approach the Pack. Alignment and
grasping of the Pack will be performed using
infrared receiver/transmitter pairs, in conjunction
with digital compasses on both the MTR and the
Pack.
Note that many of the sensory devices mentioned
above cannot operate in a space environment.
Nonetheless alternatives exist that do. Usage of
cheaper systems allows the principles of operation of
the MTR system to be demonstrated.
4 BEHAVIOUR & CONTROL
SYSTEM ARCHITECTURE
Many functions of the system will be behaviour-
supported as this offers fast response times and
simplifies the overall control task. In avoiding
hazardous situations e.g. tipping over whilst
traversing on the sides of a crater in order to acquire
samples, or while cooperatively transporting an
extended payload (Bouloubasis, et al, 2005),
reflexive responses can be employed. Direct control
of the fourteen actuators would necessitate
enormous processing power and is not considered as
an option.
The MTR offers many opportunities for
behaviour based control. The Obstacle Avoidance
Behaviour (OAB) will utilise the ultrasonic sensors’
output to provide collision-free traversal when
enabled. In combination with an on-board digital
compass the maintenance of the course of traversal
will be ensured in case the vehicle must deviate from
its original path to avoid a collision.
As mentioned above, internal re-configurability
by means of re-allocating the rover’s centre of mass
through the suspension system (ASM) and the
frame’s rotation around the axis that links the two
suspension shoulders (MFRM) aims to offer rough
terrain stability. The Stability Enhancement
Behaviour (SEB) will obtain feedback from the
strain gauges located in the steering system and the
two-axis inclinometer to decide whether the
shoulder angle and/or the base pitch need to adjust to
accommodate differential altitude changes in the
rover’s local terrain.
In some cases it may be required e.g. for the
operation of a SP/TP, to maintain a particular
orientation of the body with respect to the
horizontal. The Orientation Maintenance Behaviour
(OMB), using the information obtained from the
inclinometer, will adjust the pitch angle of the body
to ensure that the desired orientation is maintained
during traversal of varying slope terrains.
Control Station
MT
R
SP/TP
Wireless Ethernet
Wireless Ethernet
MTR: THE MULTI-TASKING ROVER - A New Concept in Rover Design
179

The approach to a Pack remote from the MTR
will be accomplished using an RF beacon. Once
enabled, the Pack Approach Behaviour (PAB) will
alter the rover’s velocity vector to point towards the
RF source. Following that the Pack Docking
Behaviour (PDB) will align the rover’s body with
the Pack. This will be established using a pair of
digital compasses in conjunction with infrared
transmitter/receiver pairs situated on the contact
faces of the MTR and the Pack. Once alignment is
verified, the ASM module will lower the body of the
MTR so as to obtain contact with the Pack. Once
contact is established the Pack will utilise the
mounting points offered by the MTR and physically
couple the two systems (Figures 6a-b).
The integration of a Pack may introduce
additional behaviours in the control system. For
example a Tool Pack may contain a manipulator
used for the cooperative transportation of extended
payloads (Bouloubasis, et al, 2003). It has been
demonstrated that a number of behaviours and
specialized sensory systems can be incorporated for
the completion of such a task (Bouloubasis, et al,
2005). Figures 6a-e shows a typical sequence of
actions that the MTR must perform in order to
acquire and utilize the Manipulator TP: dock to the
Pack, acquire contact and grasp it, lift it and rotate it
to the desired height and angle of operation, and
finally deploy it.
A single architecture must integrate all the
behaviours mentioned above and more importantly
any new behaviours introduced to serve the
operation of any SP/TPs. A multilayered architecture
(Brooks, 1986) assumes the addition of ‘levels of
competence’ to the existing ones, to achieve further
functionality. In an upgradeable, multi-functional
system like the MTR, this translates to either a very
complex hierarchical structure at the low level,
capable of accommodating additions in the higher
level of the architecture, or new levels that suppress
the lower ones. The designer cannot possibly predict
the behaviours that future Packs may require to
operate and therefore cannot predict ways that these
will interact with the existing MTR.
The single-layered Ego Behaviour Architecture
(EBA), (Lewis, et al 1997) is comprised of a number
of behaviours, which operate autonomously and
independently of each other. Each behaviour is
developed separately, tested and then integrated into
the existing architecture using an elementary
summation function (Fig 7). This facilitates the
design and suits the operation of the MTR since it
fulfils the need for uncomplicated assimilation of
new behaviours in the existing architecture. Another
advantage of the EBA is that the arbitration
mechanism allows cooperation or competition of
two or more behaviours, the emergent response
being the resultant effect rather than a single
behaviour. For example if PAB, OAB and SEB are
enabled, the rover will traverse towards the Pack
(RF source), change the velocity vector to avoid any
obstacles, maintain course, and at the same time
adjust its centre of mass through ASM and MFRM
systems to account for rough terrain.
Each Behaviour has an associated Ego (Figure 7).
The behaviour takes as input its current Ego Status
(Active or Inactive) together with any system
variables, e.g. sensory information, commands from
control station, etc. and produces a Desired
Response. A Desired Status signal, which depends
on a number of constrains, is also produced,
indicating whether the behaviour should be active or
inactive. The Ego of a behaviour compares the
system’s emergent response to that of the associated
behaviour and changes the Ego-controller gains in
order to gain control. When a behaviour fails to gain
control it becomes inactive (resigns).
d. Rotating the frame
e. The Manipulator TP is deployed
c. Lifting the Pack
a. Docking b. Securing the Pack
Figure 6: The MTR deploys the Manipulator Tool Pack.
ICINCO 2006 - ROBOTICS AND AUTOMATION
180
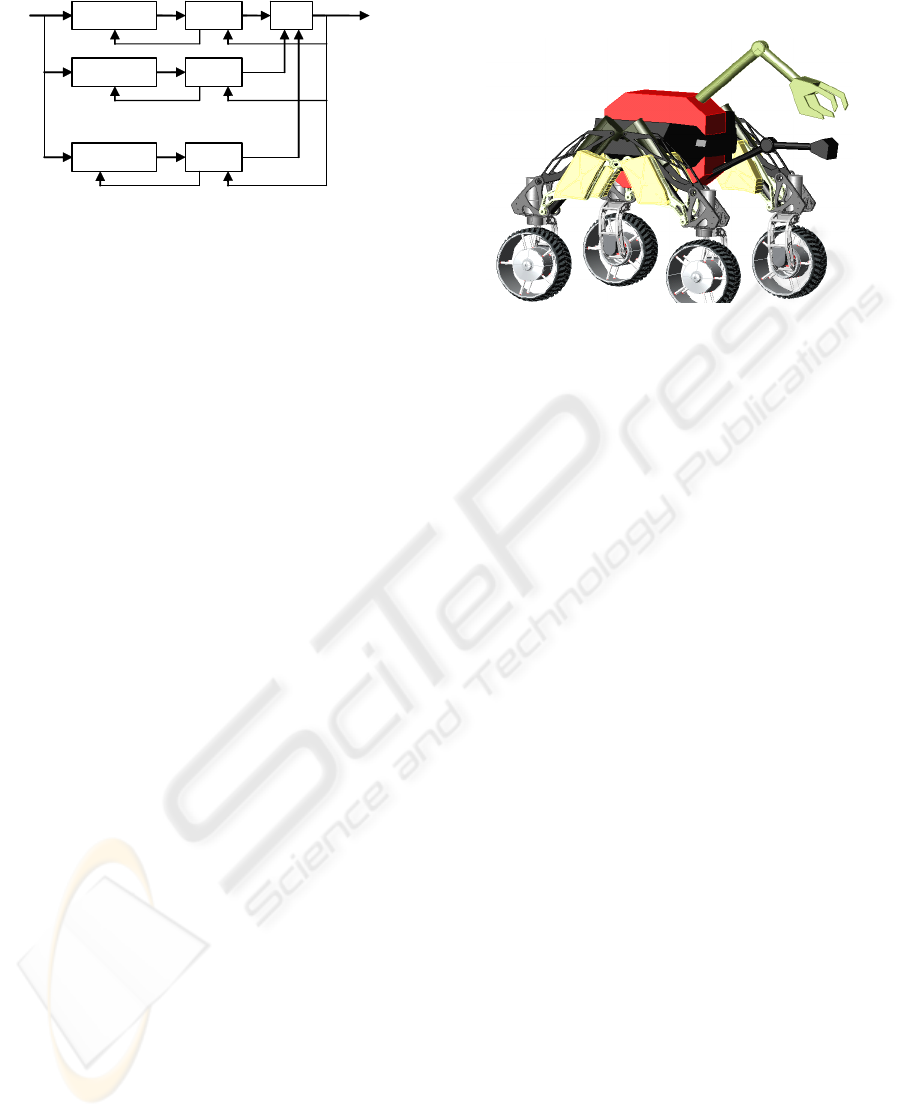
Σ
Behavior 1
Behavior 2
Behavior n
Ego 1
Ego 2
Ego 3
.
.
.
System
Inputs
Resultant
Response
Figure 7: The Ego-Behaviour Architecture.
The EBA is based on the concept that a number
of behaviours can work cooperatively and/or
competitively at the same time. In the example
mentioned, three behaviours are enabled to assist the
completion of a task, namely the safe approach to a
Pack. The PAB when enabled will direct the rover
towards the Pack. This works competitively with
OAB which will alter the vehicle’s direction when
an obstacle is detected. The sonar sensors’ input to
the behaviour will change the Desired Status to
Active. In this case the gain of the OAB Ego-
controller will be higher than that of the PAB and so
OAB will take over. When the obstacle has been
bypassed the behaviour will indicate a Desired
Status of Inactive; the Ego-controller of OAB will
resign giving the control back to PAB. In the same
example OAB and SEB will work cooperatively
towards safe traversal of the rover to the target area.
5 SUMMARY & CONCLUSIONS
The work presented in this paper outlines innovative
rover systems design concepts which could be
integrated to existing or future planetary surface
exploration rover designs. Emphasis has been given
in this paper to the overall design of the Multi-
Tasking Rover system. The MTR focuses mainly on
modularity and upgradeability, which are enhanced
by re-configurability (internal & external) of the
structure. Science Packs (SPs) and Tool Packs (TPs)
provide varying functionality to the MTR system.
Figure 8 shows the MTR equipped with two Packs: a
Manipulator TP that lifts small rocks and a
Spectrometer SP that examines soil underneath.
Our current work focuses on the design and
construction of mechanical and electronic systems
for the MTR. A Pack is also being designed in order
to demonstrate the fundamental principles of
operation of the MTR. The integration of the EBA
with the associated behaviours will follow the
completion of the electronics architecture. Further
developments will include incorporation of a stereo
camera system and vision-guided navigation.
Figure 8: A Manipulator TP is used in combination with a
Spectrometer SP to examine areas of interest under small
rocks.
REFERENCES
NASA, Human Exploration of Mars: The Reference
Mission (Version 3.0 with June, 1998 Addendum) of
the NASA Mars Exploration Study Team, Exploration
Office, Advanced Development Office, Lyndon B.
Johnson Space Center, Houston, TX 77058, June,
1998.
P. S. Schenker, et al, “Reconfigurable robots for all terrain
exploration”, in Proceedings of SPIE Vol 4196,
November 2000.
James B. Garvin, Daniel J. McCleese, NASA's Mars
Exploration Program: Scientific Strategy 1996 - 2020,
6th International Conference on Mars, April, 2003.
T. L. Huntsberger, et al, "Sensor-Fused Autonomous
Guidance of a Mobile Robot and Applications to Mars
Sample Return Operations", Part of SPIE Conference
on Sensor Fusion and Decentralized Control in
Robotic Systems II, Boston, Massachusetts,
September, 1999.
Antonios K. Bouloubasis and Gerard T. McKee,
Cooperative Transport of Extended Payloads,
Proceedings of ICAR 2005, Seattle, pp. 882-887,
2005.
A. K. Bouloubasis, G. T McKee, P. S. Schenker, A
Behavior-Based Manipulator for Multi-Robot
Transport Tasks, in the IEEE International Conference
on Robotics and Automation (ICRA) 2003, Taipei,
Taiwan, May 2003, pp. 2287-2292.
R. A. Brooks, "A Robust Layered Control System for a
Mobile Robot", IEEE Journal of Robotics and
Automation, 1986.
M. G. Lewis, P. M. Sharkey, “A plug and play architecture
for emergent behaviour in robot control”, Proceedings
Configuration an Control Aspects of Mechatronics,
Ilmeneau, Germany, September 1997.
MTR: THE MULTI-TASKING ROVER - A New Concept in Rover Design
181
