
ROBOTIC ARCHITECTURE BASED ON ELECTRONIC
BUSINESS MODELS
From Physics Components to Smart Services
José Vicente Berná-Martínez, Francisco Maciá-Pérez, Virgilio Gilart-Iglesias,
Diego Marcos-Jorequera
Computer Science Department, University of Alicante, San Vicente del Raspeig, Spain
Keywords: Robotic, Smart Services, SOA, e-Business, Distributed system, Middleware.
Abstract: This paper presents an approach for designing robots and robotic systems based on the application of
models, architectures, techniques and tools that have contributed valid solutions in other areas, such as e-
business. Before applying these solutions, the physical elements that make up a robotic system are subjected
to a normalization process in order to characterize their functional contributions. In this way, the conceptual
model and the technical architecture of the service-oriented architecture robotic system is established.
1 INTRODUCTION
Robotics is a continually growing area, and is
subject to great barriers that condition its growth and
functionality. Such obstacles include the lack of
unicity and standards, even in the most elementary
components; the complexity in its design,
development and implementation due to the great
number of implied disciplines; and the great
dependency of the underlying technology that makes
up and sustains the physical layer.
These types of problems, in which a multitude of
actors, disciplines and technologies conjugate
themselves, is very common in the development of
applications distributed on the Internet and for which
information and communication technologies (ICT)
have already provided successful solutions. This
new scene has forced the business applications to
qualify mechanisms that allow their distributed
development, reusability, integration of modules and
components, and methods of interaction between
organizations. Thus, models, architectures, design
patterns and tools that are providing scalable,
flexible, integrated and valid solutions, have been
developed in the long term. In this way, the ICT, as
a whole, have been instituted as the technological
bases on which the present industrial and productive
weave is sustained.
Due to the fact that the operative and functional
requirements in the area of robotics coincide with
those that have been resolved in the area of internet-
distributed applications, we propose applying these
same solutions (n-tier architectures, distributed
software components, B2B, B2C or M2M models
and SOA architectures) to reach a scalable, flexible
and realistic model of robots and multi-robot
systems that allows us to contemplate each element
that makes up a service, independently of its nature,
ubication or any other type of physical restriction.
This paper considers which are the most suitable
technologies used in other fields, particularly in
business, and it also studies their application in robot
modelling. The existing business-robot parallelism is
analyzed as well as the logic of electronic business-
components and the distributed software component
concept is found to be the convergence point.
Therefore, the first aspect to be approached is the
process that we term normalization of components
which allows us to characterize the
electromechanical elements of the robotic system as
software components. In this way, all the
components of the robot are aligned, both physically
and conceptually, for services and, finally, an n-tier
based architecture is proposed to integrate them all
within the same conceptual model.
544
Berná-Martínez J., Maciá-Pérez F., Gilart-Iglesias V. and Marcos-Jorequera D. (2006).
ROBOTIC ARCHITECTURE BASED ON ELECTRONIC BUSINESS MODELS - From Physics Components to Smart Services.
In Proceedings of the Third International Conference on Informatics in Control, Automation and Robotics, pages 544-547
DOI: 10.5220/0001217305440547
Copyright
c
SciTePress
2 BACKGROUND
In recent years, robotics has experienced a great
advance in the many fields involved (Torres et al,
2002). Nevertheless, these advances have not
affected all the tasks that a robot may carry out to
the same extent. This may be explained by the fact
that the models and architectures used were not the
most suitable in order to obtain more far-reaching
objectives (Minsky, 2000). Aspects such as
cognition or commonsense arise from the interaction
of individuals, with their context or with other
individuals. Therefore, models and distributed
architectures that can support these multitudinal
ecosystems are required (Oatley, 2000). There are a
great number of projects that deal with collaborative
systems by which it is possible to conceive the
appropriate mechanisms and functionality of
independent techniques so that several robots can
establish relationships with each other and
efficiently obtain the fulfillment of a task (Grob et
al, 2006). These studies explore the robustness,
flexibility and ability to solve complex problems, by
using the parallelism and self-organization of robotic
communities composed of independent and even
heterogenous individuals (Mondada et al, 2004).
Many of these studies propose a technological
framework that may serve as a standard platform in
the area of robotics (Spears et al, 2004) and which
allows the implementation of the system to be
separated from the physical layer (Perez, 2000).
The use of alternative communication
mechanisms to replace traditional systems and the
study of possible relationships and their
formalisation are beginning to be used for this
purpose (Sekmen, 2004). For many years, fields that
are closely linked to robotics, such as sensoring or
monitoring, have focused on the use and application
of internet-related technologies for the development
of intelligent or embedded networks (Tao Et al,
2004), since these technologies are low cost, highly
sophisticated, far-reaching and socially acceptable.
Furthermore, they are now the main tools for
enabling distributed infrastructures to be established
and to overcome barriers related to physical
technologies (Delin et al, 2005).
The miniaturization capacity allows us to
incorporate computation in practically any
component (Gilart et al, 2006). The concept of
pervasive computing along with communications
technologies can be applied to all areas, for example,
using encrusted devices to provide internet-based
interfaces as a device management mechanism (Ju et
al, 2000). Some of the latest studies propose
intelligent environments combining the use of
embedded sensors and ontology-based contexts (Tan
et al, 2005). The success of embedded computation
is evident due to the transparent incorporation of
ITC into daily life (Hansmann Et al the 2003).
3 NORMALIZATION OF
COMPONENTS
The aim of the normalization process is to
characterize the elementary components of a robotic
system (including sensors, actuators and
computational elements) from the point of view of
its contribution to the robot’s functional and
conceptual model. In this way, a vision is generated
that firstly allows physical elements and, later,
robotic processes to evolve towards ITC services.
The process involves equipping each of the robot’s
elementary components with the required hardware
infrastructure and software so that they can be
displayed as software services. The new resulting
components of this process are named Smart
Services and allow us to raise the abstraction level of
the lowest layers, until they can be compared with
the rest of the robotic system’s software services.
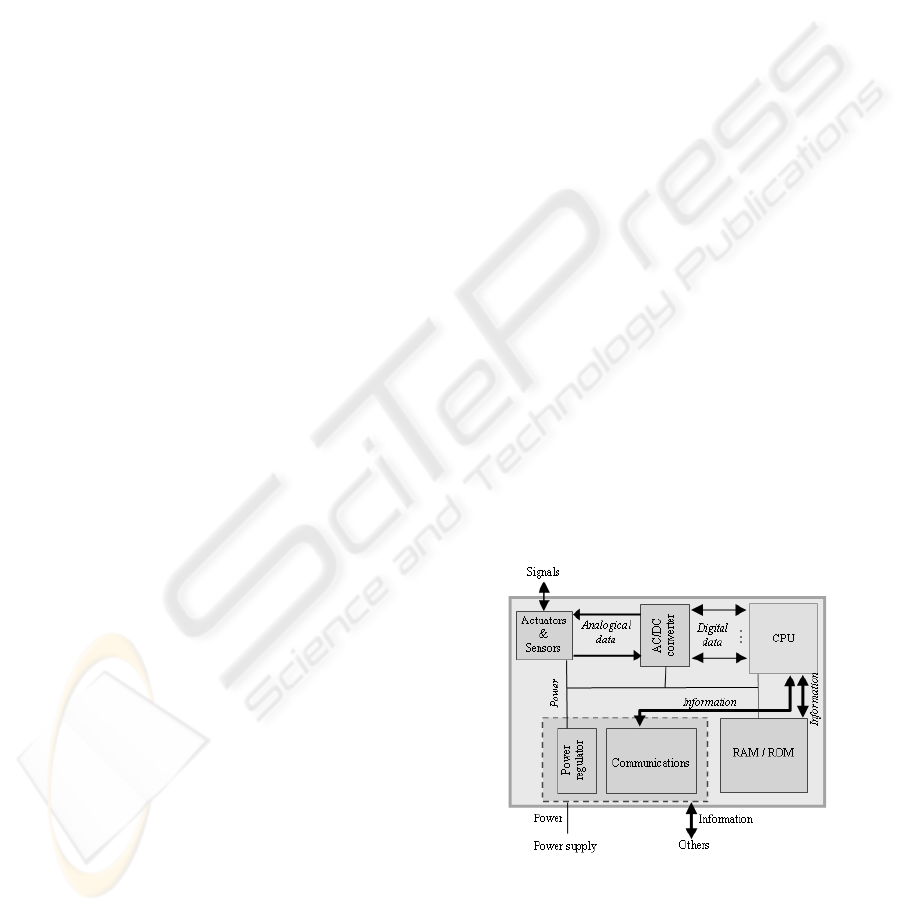
More specifically, we will firstly act on the
sensors and actuators. In general, these elements do
not have the capacity to process and store the
information with which to operate. The first stage
involves equipping these elements with the
necessary hardware so that they can do so. Figure 1
shows a block diagram with the main components.
This hardware consists of: an analogical-digital
converter that allows the analogical signals of the
actuators or sensors to be adapted to those of the
digital processor; a processor, equipped with
computation capacity; memory to store or handle the
Figure 1: Physical block diagram of the Smart Service.
ROBOTIC ARCHITECTURE BASED ON ELECTRONIC BUSINESS MODELS - From Physics Components to Smart
Services
545
data obtained or processed; a communications
system that adapts the information to the
communication channel; and an energy regulation
module that adapts input at the correct levels. The
latter two modules could be integrated since existing
communication protocols can unify these functions
(PoE or PLC).
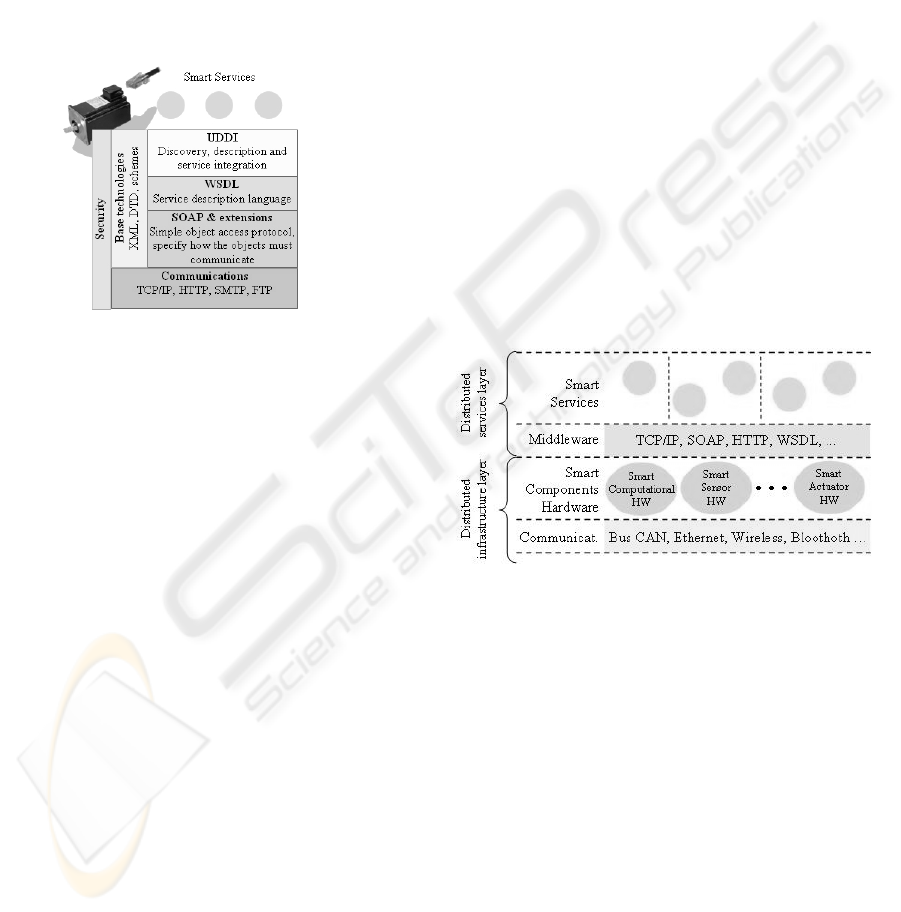
Once we have the necessary hardware, we can
incorporate the software elements into the devices as
embedded software, which will allow interaction
with it as a service. In figure 2, the embedded
software platform that is set out.
This platform consists of: a communications
layer with the standard network protocols (TCP/IP,
HTTP, SMT, FTP...); a second layer where SOAP
and its extensions are located; a third layer with the
service description languages, WSDL; and a fourth
layer where the discovery services and publication
services (UDDI) will be located. The three upper
layers of the platform use technology bases such as
XML, DTD and schemas. The whole platform is
covered by the standard network security protocols.
In this way, the services offered by each component
will be found in the upper levels.
These new devices, with their capacities, are
what we known as Smart Sensors or Smart
Actuators.
In addition to sensors and actuators, we require
the rest of the computational components that make
up the robotic system to be aligned technologically
and functionally with these new intelligent devices.
In this case, the required computational hardware
platform is already available. For this reason, it will
be sufficient to add the necessary architectonic
software layers so that planners, gateways, trajectory
calculation processes, controllers and other
functionalities of the robot can also be offered as
services. This type of services that originate from
software processes are known as Smart
Computations.
Finally, we have been able to encapsulate and
hide the different physical elements involved in the
system and, since they are all now shown as
services, we have grouped them under the common
name of Smart Services, independently of their
physical nature.
Given that now there is nothing to prevent a
Smart Service from being made up of other Smart
Services, we can distinguish between Basic Smart
Services, such as those which cannot be divided into
other Smart Services, and the Compound Smart
Services, which use at least one other Smart Service,
which in turn may be either basic or compound.
4 CONCEPTUAL TECHNICAL
ARCHITECTURE
Once all the elements have been standardized and
reduced to distributed software components (Smart
Services), we can apply the solutions extracted from
the e-business models or, more generically, from the
distributed software component-based systems.
In the case of the technical architecture of the
robot, an n-level architecture can be applied where a
homogenous and structured panorama is formed in
layers. A communications level is determined to
support the Smart Service hardware, which is
formed by the whole physical layer which makes up
each of the components. The Middleware layer is
comprised of the software that allows us to manage
the described communications and processing
mechanisms. It will be composed of the transmission
protocols, messages language, component access
protocols, discovery protocols, etc. This level is
responsible for abstracting the traditional
components towards the world of the services. As
regards the technical physical architecture, each
intelligent hardware component, together with its
Figure 2: Logical diagram of the component.
Figure 3: Conceptual technical architecture to
a
distributed robotic system based on Smart Services.
ICINCO 2006 - ROBOTICS AND AUTOMATION
546

service layer, constitutes a container upon which are
executed the distributed software components that
implement their business logic or, in terms of the
robotic system, the functionality of their
components. The service layer is the platform for
developing the software components that provide the
functionality and interface that the Smart Service is
able to offer to other components, whether they
belong to the same robot or to any other client with
the sufficient capacity and permission to call it.
The resulting architecture is known as Service-
Oriented Robotic Architecture and incorporates
characteristics such as the organization of the
elements involved into perfectly defined
compartments and interfaces.
5 CONCLUSIONS
In this paper we propose a conceptualization that
breaks down the architecture of the underlying
technology and frees the traditional organisational
schemas of their limitations; it allows us to
disconnect the disciplines involved in the
development of projects by elevating the
functionality of the minimum components, thanks to
the appearance of middleware; and it homogenizes
the technologies that will be used when separating
and organizing the different functional aspects in
layers and levels with well-defined interfaces.
The benefits not only affect the architectonic
aspects, but they also allow us to take advantage of
the conceptual and organisational characteristics of
the service paradigm, ensuring a simpler integration
based on standards, scalability, regardless of the
platform and manufacturer, and using realistic
development tools. The technological gap that
separates implementation models is reduced as since
the minimum elements of the robotic systems are
technologically more advanced.
Finally, the proposed approach opens the door to
acquiring new capabilities such as self-repair, self-
assembly or service replication, since the
technologies that sustain the service paradigm can
support or implement mechanisms related to these
proposals.
REFERENCES
Delin, K., Jackson, S., Johnson, D., Burleigh, S.,
Woodrow, R., McAuley, M., Dohm, J., Ip, F., Ferré,
T., Rucker, D., Baker, V. “Environmental Studies with
the Sensor Web: Principles and Practice”. Sensors.
Vol. 5, 2005. pp 103-117.
Gilart, V. , Ramos, H., Maciá, P. “Del eBusiness al
Smartscrew” en Maciá, F. y García, J. M. (ed.),
Servicios Electrónicos para la Sociedad de la
Información. San Vicente del Raspeig. Publicaciones
de la Universidad de Alicante. 2006
Grob, R., M. Bonani, M., Mondada, F., Dorigo, M.
“Autonomous Self-assembly in a Swarm-Bot”.
Proceedings of the Third International Symposium on
Autonomous Minirobots for Research and
Edutainment. Springer. Verlag.
Hansmann, U. , Merk, L., Nicklous, M., Stober, T.
“Pervasive Computing”. Böblingen, Germany.
Springer. 2003.
Ju, H. T, Choi, M. J., Hong, J. “An efficient and
lightweight embedded Web server for Web-based
network element management”. International Journal
of Network Management. Vol. 10, num. 5, 2000..
ISSN:1099-1190. pp. 261-275.
Minsky, M. L.. “DRAFT. Future Models for Mind-
Machines”. Proceedings of the AISB'00 Symposium
on Creative & Cultural Aspects and Applications of
AI & Cognitive Science. Birmingham. pp.41-53. 2000.
Mondada, F., Pettinaro, G., Guignard, A., Kwee, I.,
Floreano, D., Deneubourg, J., Nolfi, S., Gambardella,
L., Dorigo, M. “Swarm-Bot: a New Distributed
Robotic Concept”. Autonomous Robots. Vol 17, 2004.
ISSN: 0929-5593. pp. 193-221.
Oatley, K. “Shakespeare's invention of theatre as
simulation that runs on minds”. Proceedings of the
AISB'00 Symposium on Creative & Cultural Aspects
and Applications of AI & Cognitive Science. pp.41-
53. Birmingham, UK, 2000. ISBN 1 902956
Pérez, A., 2000. “Of implementing neural epigenesist,
reinforcement learning, and mental rehearsal in a
mobile autonomous robot”. Proceedings of the
AISB'00 Symposium on Creative & Cultural Aspects
and Applications of AI & Cognitive Science.
Birmingham, ISBN 1 902956, pp.41-53.
Sekmen, A. “Multi-Robot Communication via Grid
Services”. IASTED International Conference on
Robotics and Applications. Honolulu. 2004
Spears, W., Gordon-Spears, D., Heil, R.“Distributed,
Physics-Based Control of Swarm of Vehicles”.
Autonomous Robots. Vol. 17, 2004. ISSN: 0929-5593.
pp. 137-162.
Tan, J. G., Zhang, D., Wang, X., Cheng, H. “Enhancing
semantic spaces with event-driven context
interpretation”. En Gellersen, H. W., Want, R. y
Schmidt, A., Pervasive Computing. 2005. LNCS 3468.
ISSN: 0302-9743, pp. 80-97.
Tao, V., Liang, S., Croitoru, A. “GeoSWIFT: Open
Geospatial Sensing Services for Sensor Web”. in A.
Stefanidis and S. Nittel (ed.), GeoSensor Networks.
CRC Press. 2004. ISBN: 0415324041, pp. 80-86.
Torres, F., Pomares, J., Gil, S., Aracil, R. “Robots y
Sistemas Sensoriales”. Prentice-Hall. 2000.
ROBOTIC ARCHITECTURE BASED ON ELECTRONIC BUSINESS MODELS - From Physics Components to Smart
Services
547
