
A System for Analysis of the 3D Mandibular
Movement using Magnetic Sensors
and Neuronal Networks
Isa C. T. Santos
1
, João Manuel R. S. Tavares
1
, Joaquim G. Mendes
1
,
Manuel P. F. Paulo
2
1
Faculty of Engineering, University of Porto, Porto, Portugal
2
Faculty of Dental Medicine, University of Porto, Porto, Portugal
Abstract. In Dental Medicine, the study of the mandibular movement has an
important role in the development of oral rehabilitation treatments, because it
allows to determine if exists or not pathologies in the temporomandibular joints
and helps the definition of adequate treatment plans. In this paper, is presented
the development of a new system for the acquisition of the 3D mandibular
movement. A common facial arc used in Dental Medicine was adapted as main
support structure, and electromagnetic sensors were used to acquire the move-
ment. To visualize and analyze in a personal computer the movement acquired,
it was developed a computational application using LabVIEW. In this work
neural networks were employed to transform in cartesian coordinates the elec-
trical signals obtained from the electromagnetic sensors used.
1 Introduction
The human mandible and the temporomandibular joint form an interest and complex
biomechanical system that performs several functions, and have the capacity to make
high forces with great precision. The peculiar construction of the temporomandibular
joint allows the mandible to move in six degrees of freedom. In Dental Medicine is
essential to know the mandibular cinematic to simulate the temporomandibular joints,
to position teeth moulds in articulators, and to reproduce the mandibular movements
in order to insure a satisfactory occlusion.
Enciso and Hugger [1, 2] describe the Jaw Motion Analyzer and Pröschel [3] pre-
sents the ARCUSdigma. These are two commercial systems for the acquisition of the
3D mandibular movement that use ultrasonic sensors to acquire the trajectory of the
incisive point. Leader [4], Mesnard [5] and Kinuta [6] use optical systems to record
the same movement, and Garcia [7] describe the K7 Evaluation System which is a
system that uses electromagnetic sensors for the same purpose.
Currently, both commercial and custom made devices are considered very expen-
sive and difficult to use in common clinical situations, [8].Considering these disad-
C. T. Santos I., Manuel R. S. Tavares J., G. Mendes J. and P. F. Paulo M. (2006).
A System for Analysis of the 3D Mandibular Movement using Magnetic Sensors and Neuronal Networks.
In Proceedings of the 2nd International Workshop on Artificial Neural Networks and Intelligent Information Processing, pages 54-63
DOI: 10.5220/0001208000540063
Copyright
c
SciTePress

vantages, it was developed a new system for the acquisition, visualization and analy-
sis of the 3D mandibular movement that is economical, easy to use and sufficiently
precise, [8].
The development of the new system was divided in three phases: the choice of the
technology to use in the acquisition of the movement, the conception of the support
structure for the sensors used, and the development of a computational application to
visualize and analyze the 3D data obtained by using a personal computer.
In the next section is described the prototype developed for acquired the 3D man-
dibular movement. Next, is presented the computational application developed to
visualize and analyze the movement acquired and the usage of neural networks to
transform the electric signals of the sensors in 3D cartesian coordinates. Some con-
clusions and perspectives of future work are presented in the fourth, and last, section
of the paper.
2 System’s Development
The development of our prototype system began with the choice of the technology to
use in the 3D mandibular movement acquisition, because the device support structure
would strongly depend on it. Electromagnetic sensors were used to measure the mag-
netic field created by a small magnet, Fig. 1, placed inside the patient’s mouth (near
to the incise point). The magnetic field of the used magnet is 760 Gauss.
Fig. 1. Magnet used in our system for the acquisition of the 3D mandibular movement.
The selected sensors were the AA002-02 from NVE Corporation, Fig. 2. These sen-
sors were selected due to their low price, low current consumption, small size (5.99 x
4.90 x 1.55 mm) and excellent sensitivity.
As the AA002-02 sensors are sensitive in one direction in the plane of the integrated
circuit it was necessary to use three sensors in order to acquire the 3D movement of
the mandible. Thus, two circuit boards were specially developed in order to mount the
sensors perpendicularly and to handle them more easily.
After choosing the technology to use in the movement acquisition, it was necessary
to design the support structure for our acquisition system. Instead of creating a new
device structure, a common facial arc used in Dental Medicine was adapted as the
main support structure. Among the commercial facial arcs the chosen one was the
Arcus from Kavo, Fig. 3.
55

Fig. 2. Sensors used in our prototype system: AA002-02 from NVE Corporation.
Fig. 3. Facial arc Arcus from Kavo used as the main support system of our prototype system.
As the selected arc was primary conceived to make static measurements, the first step
in its adaptation was the redesign of the pieces that could difficult the dynamic meas-
urement or harm the patient. Thus, the auricular pieces were redesigned, Fig. 4.
Fig. 4. Redesigned auricular pieces materialized by rapid prototyping.
For the development of the sensors support was taken in consideration that it should
meet the following requirements: to be adaptable to the facial arc used; to accommo-
date the two circuit boards designed, and the three electromagnetic sensors used for
the movement acquisition; and to be light.
To attach the sensors support to the facial arc it was used an already existing groove
in the same; then, to avoid the translation and the rotation of the support relatively to
56

the facial arc, it was created a notch in the sensors support, Fig. 5. The end of the
sensors support was enlarged to accommodate the connection between the wires com-
ing from the sensors and the data acquisition’s box.
Fig. 5. The developed support for the sensors used materialized by rapid prototyping.
The two circuit boards developed are mounted in the sensors support by pressure; the
access to the sensors boards is carried through a sliding cover, which has a hole for a
led that indicates if the acquisition system is turned on or off, Fig. 6 and 7.
Fig. 6. Detail of the circuit boards mounted in the support developed for the sensors used.
For the acquisition of the sensors signals it was used a data acquisition device (DAQ)
with plug-and-play USB connectivity, the NI USB-6008 model from National Instru-
ments. The NI USB-6008 is light, small, has a low price and is easy to use. It has four
differential analog channels (or eight single ended), 12 bit resolution, acquisition rate
up to 48 kS/s and can power external components as well. In this work it was the
differential mode in order to reduce the electrical noise.
57

Fig. 7. Sensors support developed and the magnet used in the acquisition of the 3D mandibular
movement.
In spite the DAQ selected could be used to directly power the electromagnetic sen-
sors, as already referred, it was used an external power supply for that purpose in-
stead. The power supply RS7694 from RS Amidata has +15V output voltage which
increases by three the output signal of the magnetic sensors.
Fig. 8 shows the DAQ and the power supply used in our prototype system for the
acquisition of the 3D mandibular movement.
Fig. 8. Acquisition box with the DAQ and the power source used in our acquisition system.
58
3 Computational Application
To make easy the acquisition and analysis of the 3D mandibular movement using a
personal computer, it was build a new computational application with an adequate
graphical interface using the developing tool LabVIEW from National Instruments.
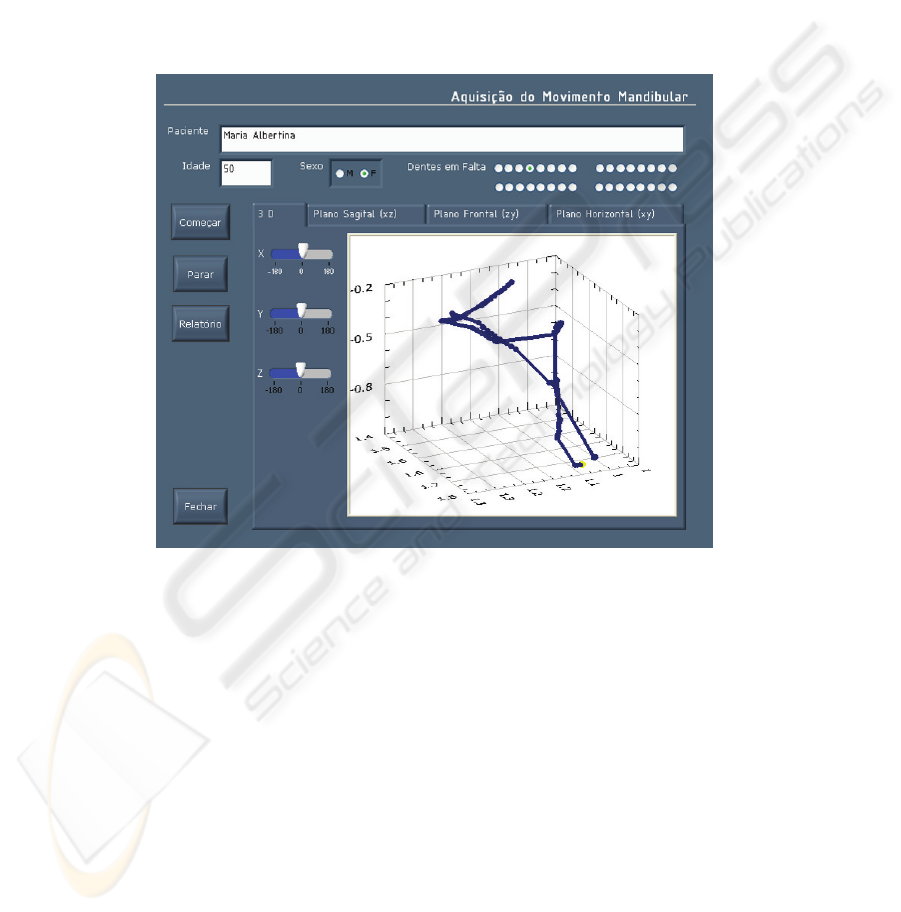
Figs. 9 and 10 show the interface of the developed application for our prototype
system. In the upper part of the interface designed, the users can write the patient’s
personal data: the name, the age, the sex and the missing teeth. The control buttons of
the application (start “Começar”, stop “Parar”, report “Relatório” and exit “Fechar”)
are placed in the lower part of the interface.
Fig. 9. Computational application developed for the 3D mandibular movement acquisition and
analysis: 3D graphic.
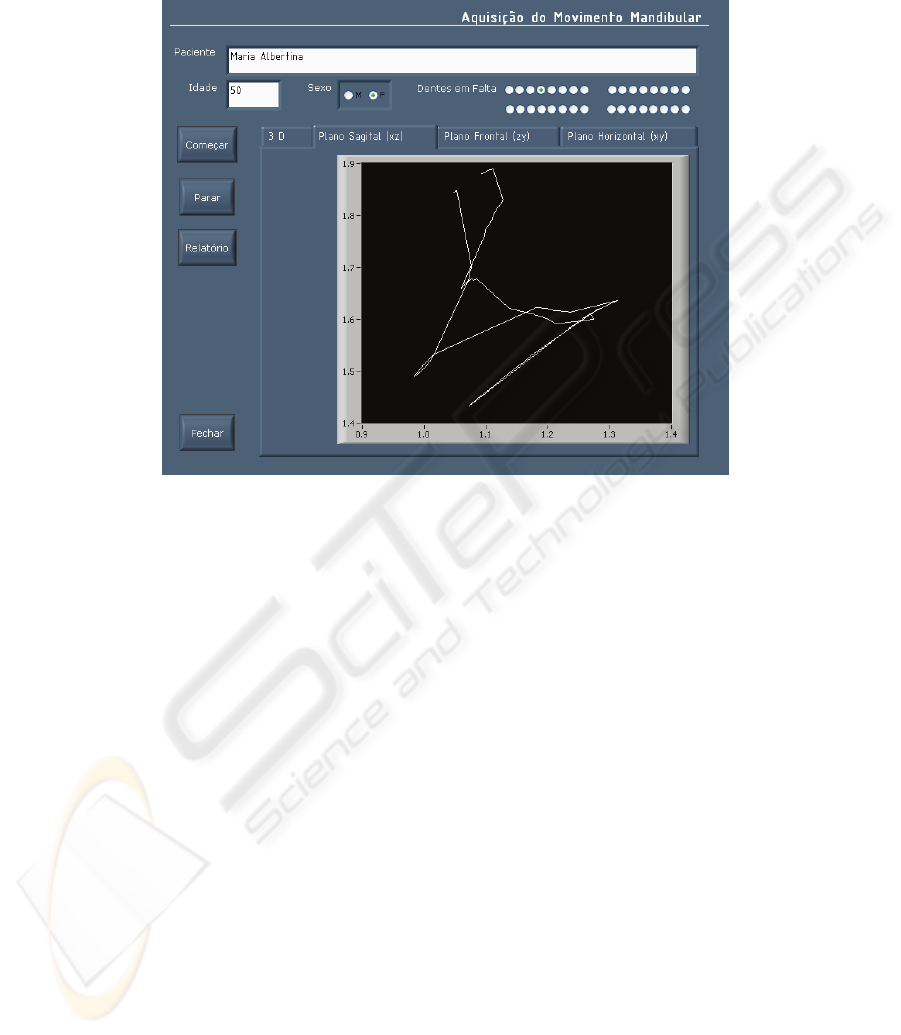
The results obtained are displayed using four graphics: one with the 3D movement
(Fig. 9), and three 2D graphics with the projections of the same movement in the
sagital (Fig. 10), frontal and horizontal plans. The user can rotate and zoom the 3D
graphic.
By pressing the button “Relatório” a report for the current medical exam is gener-
ated and then the user can print or save it, Fig. 11.
To know the 3D trajectory of the magnet, placed inside the patient’s mouth, was
necessary to convert the output voltage of the three electromagnetic sensors used in
3D cartesian coordinates.
While testing the acquisition system developed, was verified that moving the mag-
net in one direction the output voltage would vary simultaneously for the three sen-
59
sors used; that is, to each position in space (coordinates x, y and z) correspond a set
of three voltages. To solve this problem, a neural networks approach was used.
Fig. 10. Computational application developed for the 3D mandibular movement acquisition
and analysis: 2D graphic in the sagital plane.
Neural networks are inspired by biological nervous systems; they are composed of
simple elements operating in parallel and can be trained to perform a particular func-
tion by adjusting the values of the connections (weights) between elements, [9, 10].
In this work radial basis networks were used, because they are trained more
quickly, and is possible to interpret the contribution of each unit in the global behav-
ior of the net, because each layer is only active in a limited zone of the entry space
[10].
The network used is composed by two layers: a hidden radial basis layer of S1 neu-
rons, and an output linear layer of S2 neurons, Fig. 12. The transfer functions consid-
ered in the neural network used are plotted in Fig. 13.
As generally the mandibular movement doesn’t exceed the limits defined by a par-
allelepiped with 70 mm height, 40 mm length and 40 mm depth, it was registered the
output voltage of each electromagnetic sensor at several calibration points. These
points’ coordinates and the associated three voltages were then used as “inputs” and
“targets” to create and train the network used in the conversion voltages/coordinates.
The neural network built was integrated in our computational application using the
LabVIEW as well.
60
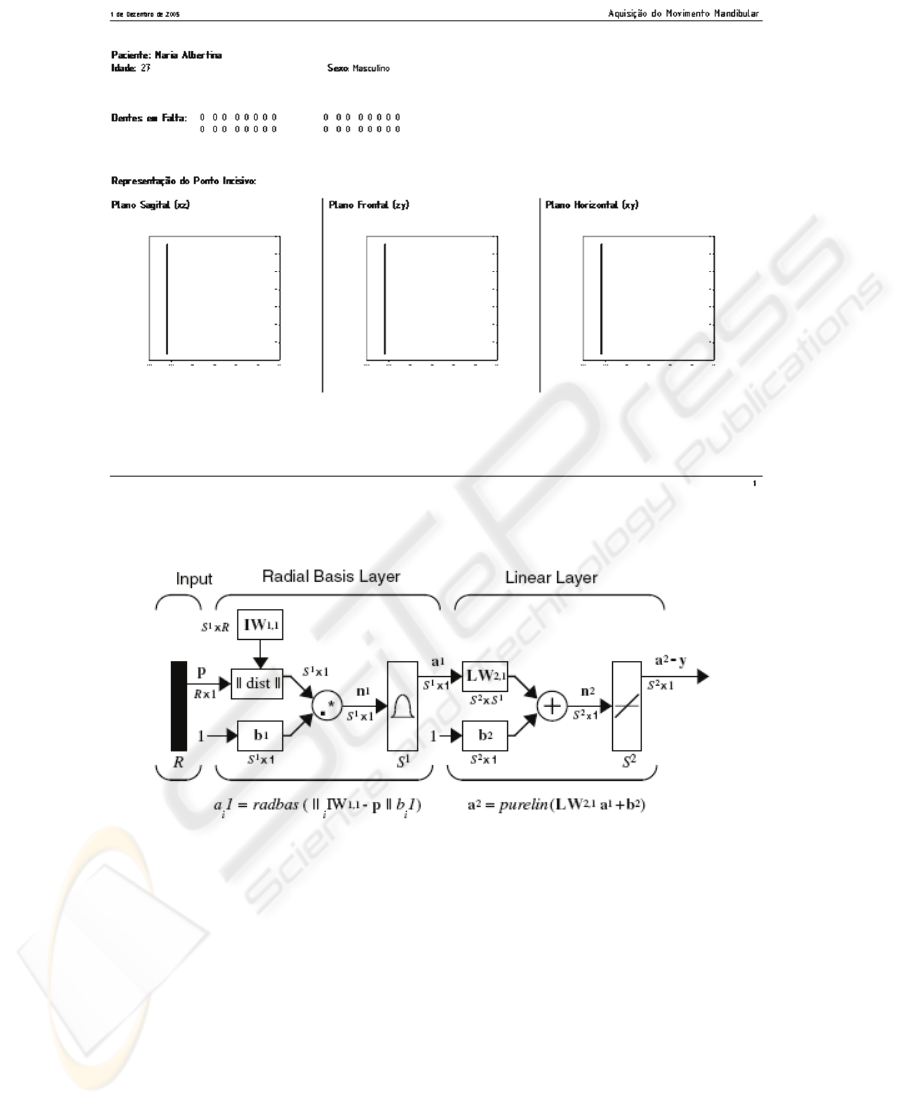
Fig. 11. Example of a measurement report generated using the computational application de-
veloped for our system.
Fig. 12. Neural network used in our system for the conversion voltages/coordinates (adapted
from [9]).
In Fig. 14 is presented our prototype system for 3D mandibular movement acquisition
and analysis. The usage of the developed system is easy and comfortable for patients
and medical doctors.
61
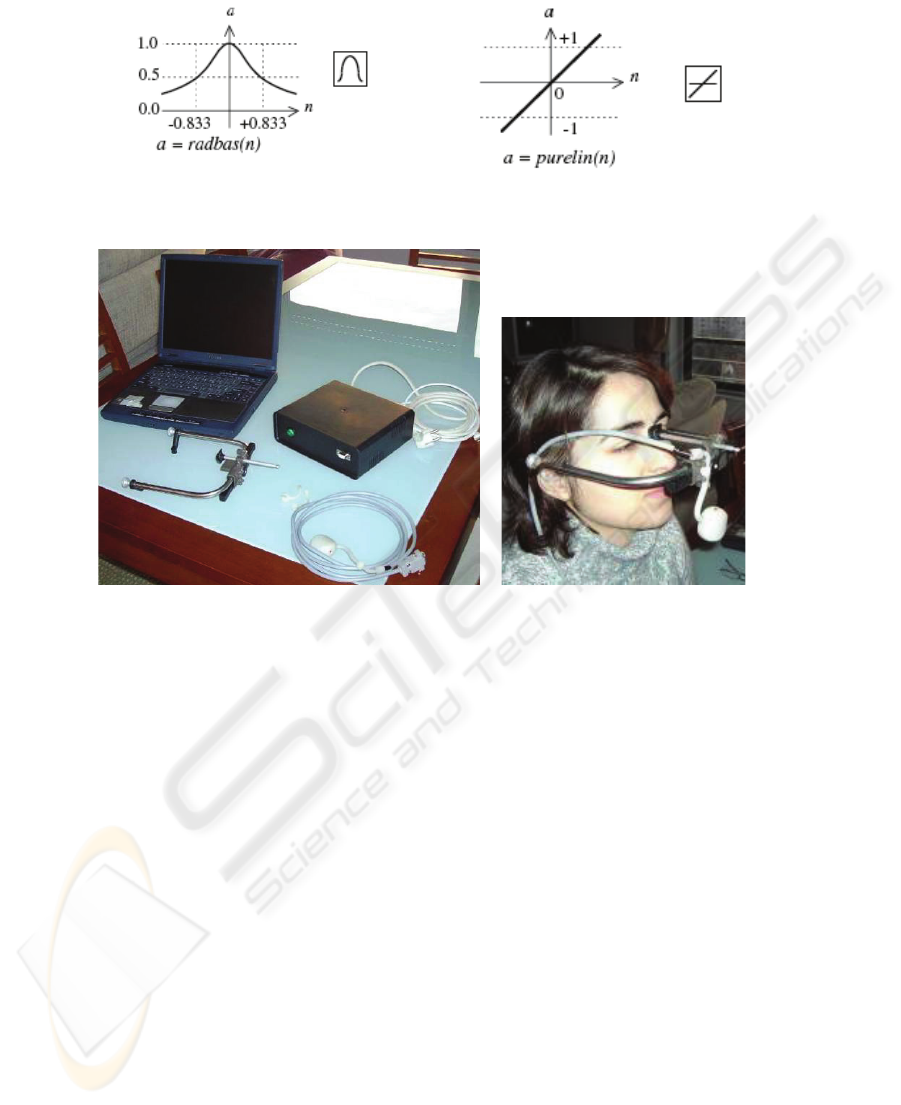
Fig. 13. Transfer functions used in the neural network adopted in our prototype system for the
conversion voltages/coordinates (adapted from [9]).
Fig. 14. Our prototype system for 3D mandibular movement acquisition and analysis and its
usage.
4 Conclusions and Future Work
The aim of this work was the developing of a new prototype system for the acquisi-
tion, visualization and analysis of the 3D mandibular movement, economical, easy to
use and comfortable to patients.
To acquire the 3D trajectory of the incise point were used electromagnetic sensors,
because they are economical and don’t impose any restrictions to the acquisition
process. The magnetic field is created by a small magnet placed inside the patient’s
mouth, near to the incise point.
A facial arc common used in Dental Medicine was adapted as the main support
structure of our acquisition system. Some pieces of this arc were redesigned for a
more comfortable patient’s usage, and it was designed a specific support for the three
magnetic sensors used in the movement acquisition.
To visualize and analyze the acquired signals in a personal computer it was created,
using the developing tool LabVIEW, a computational application with a graphical
interface with which the operator can register the patient’s personal data also; with
the same application, its possible to create a report with the patient’s data and the
62

results of the medical exam as well. To convert the electrical signals obtained by the
three electromagnetic sensors in distance a neural network was used.
The prototype system developed has adequate precision and can be produced at low
price. So we think that it is a good help for medical doctors to detect and define good
treatment plans for problems of dental occlusion.
As some possible future tasks we can enumerate: for clinical validation, the use of
the developed prototype system in numerous medical exams; the study of the em-
ployment of more complex neural networks, to transform the electrical signals of the
three electromagnetic sensors used in 3D cartesian coordinates; to export the exam
data to some standard articulators systems; and the animation of virtual mandibles
using the movement acquired by our system.
References
1. Enciso, R., Menon, A., Fidaleo, D.A., Neumann, U., Mah, J.: The virtual Craniofacial
Patient 3D Jaw Modeling an Animation. Studies in Health Technology Informatics, vol. 94
(2002) 65-71
2. Hugger, A., Bölöni, E., Berntien, U., Stüttgen, U.: Accuracy of an ultrasonic measurement
system for jaw movement recording. 35th Annual Meeting of the Continental European
Division of the International Association for Dental Research, Montpellier, France (1999)
3. Pröshel, P., Morneburg, T., Hugger, A., Kordaβ, B., Ottl, P., Niedermeier, W., Wichmann,
M.: Articulator-Related Registration – A simple concept for minimizing eccentric occlusal
errors in the articulator. The International Journal of Prosthodontics, vol.15, no.3 (2002)
289-294
4. Leader, J.K., Boston, J.R,, Debski, R.E., Rudy T.E.: Mandibular kinematics represented by
a non-orthogonal floating axis joint coordinate system. Elsevier (2002)
5. Mesnard, M., Ballu, A., Cid, M.: Méthode et validation pour l’Articulation Temporo-
Mandibulaire. 16ème Congrès Français de Mécanique, Nice, France (2003)
6. Kinuta, S., Wakabayashi, K., Sohmura, T., Kojima, T., Nagao, M., Nakamura, T., Takaha-
shi, J.: Simple system to record jaw movements by a home digital camcorder. The Interna-
tional Journal of Prosthodontics, vol.16 no.5 (2003) 563-569
7. Garcia, R.C.M.R., Oliveira, V.M.B., Del Bel Cury, A.A.: Short term evaluation of interoc-
clusal distance during speech after new removable prosthesis insertion. Journal of Applied
Oral Science, vol.11 no.3 (2003) 216-222
8. Santos, I.C.T.: Desenvolvimento de um Sistema Protótipo para a Aquisição e Análise do
Movimento Mandibular. MSc Thesis in Industrial Design of the University of Porto, Portu-
gal (2005)
9. Demuth, H., Beale, M., Hagan. M.: Neural Network Toolbox For Use with MATLAB. The
Mathworks (2005)
10. Marques JS.: Reconhecimento de padrões métodos estatísticos e neuronais. IST Press
(1999)
63
