
USER-CENTRIC ADAPTIVE ACCESS CONTROL AND
RESOURCE CONFIGURATION FOR UBIQUITOUS
COMPUTING ENVIRONMENTS
Mike White, Brendan Jennings, Sven van der Meer
Telecommunications Software & Services Group (TSSG),
Waterford Institute of Technology, Waterford, Ireland
Keywords: Access Control, Policy Based Management, Conflict Detection and Resolution, Ubiquitous Computing.
Abstract: Provision of adaptive access control is key to allowing users
harness the full potential of ubiquitous
computing environments. In this paper, we introduce the M-Zones Access Control (MAC) process, which
provides user-centric attribute-based access control, together with automatic reconfiguration of resources in
response to the changes in the set of users physically present in the environment. User control is realised via
user-specified policies, which are analysed in tandem with system policies and policies of other users,
whenever events occur that require policy decisions and associated configuration operations. In such a
system users’ policies may habitually conflict with system policies, or indeed other users’ policies; thus,
policy conflict detection and resolution is a critical issue. To address this we describe a conflict
detection/resolution method based on a policy precedence scheme. To illustrate the operation of the MAC
process and its conflict detection/resolution method, we discuss its realisation in a test bed emulating an
office-based ubiquitous computing environment.
1 INTRODUCTION
Ubiquitous computing systems typically employ a
greater range of user interfaces than traditional
computing environments; for example, communal
displays, voice-based command interfaces, and
gesture recognition systems. The presence of such
interfaces heightens users’ awareness of, and
requirements for, privacy protection measures.
When using such interfaces, users may desire that
the system automatically reacts to the presence
and/or activities of other individuals in their physical
vicinity – typically so that their privacy concerns are
addressed. In such cases the process of defining
what actions need to be taken will depend on the
relationships between a user and these other
individuals. Furthermore, a user’s access rights
should be determined based on ongoing analysis of
the access rights and activities of other individuals
present in his/her environs.
In this paper we investigate how a management
syste
m for a ubiquitous computing environment can
control access rights in a manner that adapts to the
changing profile of the set of individuals present, or
active, within a physical space. We see context
information, particularly location and presence, as a
key trigger for the reconfiguration of services and
resources in order to adapt user access rights and
protect user privacy. We adopt a user-centred
approach, in which users are afforded the
opportunity to define their own policies, which
embody their preferences for actions to take place
based on changes in the user set present in their
vicinity. User policies could address the presence of
specific individuals, individuals with specified roles,
or individuals possessing specified access rights. For
example, in an office environment, a user may wish
to ensure that guests are never given the opportunity
to view commercially sensitive information.
The paper is structured as follows. First, we
briefly revie
w previous work on access control
approaches in ubiquitous computing environments,
focussing in particular on approaches for automatic
detection and resolution of conflicts that may arise
between access policies that users or administrators
wishes to deploy simultaneously. We then describe
the operation of the M-Zones Access Control
(MAC) process, which, through use of XACML,
provides for adaptive attribute-based access control
with conflict detection/resolution, and is integrated
349
White M., Jennings B. and van der Meer S. (2005).
USER-CENTRIC ADAPTIVE ACCESS CONTROL AND RESOURCE CONFIGURATION FOR UBIQUITOUS COMPUTING ENVIRONMENTS.
In Proceedings of the Seventh International Conference on Enterprise Information Systems, pages 349-354
DOI: 10.5220/0002578103490354
Copyright
c
SciTePress

with a policy-based management system to allow for
the reconfiguration of services and resources to
protect user privacy. We outline the implementation
of the MAC process in a test bed emulating an
office-based environment, and describe its operation
in the context of a specific use case scenario.
Finally, we summarise the benefits of the proposed
approach.
2 ACCESS CONTROL IN
UBIQUITOUS COMPUTING
ENVIRONMENTS
Ubiquitous computing environments are generally
understood to contain hardware resources providing
a wider range of command and information delivery
interfaces than provided by traditional computer
consoles. The nature of these resources can mean
that managing them in cases where users can
simultaneously request access to them can be a
complex task. Typically, only a single user can
control operation of resources such as projectors at
any given time and access to them must be
controlled in a manner consistent with system
policies and user preferences. Indeed, the user-
centred focus of ubiquitous computing environments
suggests that users should, within limits, have the
ability to adjust access rights for themselves and
others as they desire (Kagal et al. 2001), thereby
realising a more dynamic access control system, that
adapts to changing user needs.
Many systems employ role-based access control,
in which users are assigned one or more roles,
typically mapping to functions in an organisational
hierarchy, with each role being associated with a
defined profile of access permissions. Whilst
offering flexibility and relatively low management
overhead, it can be argued that this approach does
not provide the fine-grained control required in
many ubiquitous computing applications.
Additionally, it is difficult to apply it effectively in
cases where resource competition conflicts occur
when access is required by identical organisational
roles. To overcome these drawbacks, access control
decisions can instead be based on specific attributes
associated with a user, rather than on the user’s
identity or assigned role(s). This approach is at the
core of the eXtensible Access Control Markup
Language (XACML) (Godik and Moses 2003),
which has been used to provide access control in
systems such as Cardea (Lepro 2003).
Ideally, access control solutions would
automatically adjust access rights based on the
changing context in which users are requesting
access to resources – this is known as context-based
access control. From an access control perspective,
user location, presence of a group of users in a
location, the relationship between the users within
such groups, and the particular activities users are
engaged in, are probably of most relevance. Basing
access control decisions on this kind of information
is an important research topic presently; for
example, Corradi at al. (2004) have developed
UbiCOSM, a context-centric access control
middleware that assigns access rights taking into
account context, user profiles and system/user-level
authorisation policies. Also, Sampemane at al.
(2002) address aspects of context-based access
control for ubiquitous computing environments,
describing a system that changes access rights
depending on the set of users and the activity being
undertaken in a physical space.
Based on the above observations we conclude
that access control systems for ubiquitous computing
environments should be:
− user-centric: allow users the freedom to adjust
access rights as their needs evolve;
− attribute-based: access control decisions should
be based on evaluation of appropriate user
attributes, not rigidly on their identity or pre-
assigned role(s);
− context-driven: access rights should be
dynamically assigned based on analysis of
context information provided by the environment.
To realise these properties we employ a policy-
based management approach in which access rights
assignment, as well as resource configuration based
on access rights, is achieved through context-driven
analysis of system and user-specific policies. In such
a system, an important consideration is how to detect
and resolve conflicts that are likely to occur in
certain operational contexts between user and
system policies and/or between policies specified by
different users. Before introducing our access
control process, we briefly discuss recent work on
policy conflict detection and resolution, identifying
the most appropriate approach for our system.
2.1 Policy Conflict Detection and
Resolution
Conflicts between policies occur if, at any given
time, the behaviour mandated by those policies
cannot be simultaneously expedited. For example,
one policy may oblige a user to take a certain course
of action at a certain time, whilst another policy may
forbid the user, at all times, access to a resource
required to take this course of action. Policy
conflicts are often broadly classified as being static
ICEIS 2005 - INFORMATION SYSTEMS ANALYSIS AND SPECIFICATION
350

or dynamic (Lupu and Sloman 1999, Dunlop et al.
2003); static conflicts can be detected in advance (at
“compile time”), whereas dynamic conflicts are
dependant on “run time” state and thus cannot be
detected in advance.
Conflict detection involves the identification of
actual or potential policy conflicts. Methods for
automatic conflict detection focus on analysing all
policies relating to particular subject/action/target
tuples and identifying whether the there is a conflict
between the modality of these policies. Policies are
generally constructed to reflect the obligation,
permission and prohibition modal operators of
deontic logic, thus modality conflicts are exhibited
by policy pairs that, for a given subject/action/target,
indicate behaviour that is prohibited vs. allowed,
obliged vs. prohibited or obliged vs. not obliged.
Other kinds of conflict detection, in particular those
relating to the semantics of the policies, are
significantly more difficult to detect automatically.
Once potential policy conflicts have been
detected, a decision must be made as to whether to
seek to resolve the conflict, with this decision being
application-specific, but typically related to the
probability of occurrence of the identified conflict.
Two approaches to conflict resolution are possible:
revoke, re-specify and re-deploy offending policies,
or let the system assign precedence levels that
dictate which of the conflicting policies are actually
invoked. The latter approach is more practical, and
researchers have investigated/adopted numerous
schemes for assigning policy preference, for
example see (Lupu and Sloman 1999, Dunlop et al.
2003). For example, precedence can be assigned
based on: specific policies overriding general
policies; newer policies override older policies;
policies specified by a higher authority overriding
those specified by lower authorities; negative
policies overriding positive policies and vice versa;
or explicit assignment of policy weights to govern
precedence. These schemes all have strengths and
weaknesses, but it is agreed that none is suited for
use in all application scenarios.
In our case, policies can be authored by
individual users, as well as by administrators of
systems. Sets of users in a physical space are likely
to have policies with the potential to conflict with
each other, and/or with system policies. We envisage
policy conflict detection and resolution being
performed every time the set of users in a space
changes (as users enter/leave), or as the activities
they are performing change (for example, a project
meeting commences in a meeting room). We view
the former as a form of static conflict detection and
the latter more as dynamic conflict detection. We see
conflict resolution based on higher authorities
overriding lower authorities as the most appropriate
scheme in our scenario: system policies are given
precedence over user policies, and between users
precedence is based on users’ profile, including their
current roles within the space. User roles are
assigned in accordance with system policies and
may change over time. For example, in a meeting
context, a user may be assigned a speaker role when
he/she is detected as standing on a podium, and
system policies will dictate that speakers have
control over the projector, lights and other resources.
In this case that user’s policies relating to, for
example, lighting settings, will have precedence
over those of other users.
3 M-ZONES ACCESS CONTROL
(MAC) PROCESS
The M-Zones access control solution we propose has
been realised in the context of a “Ubiquitous
Management Architecture” (UMA) (Barrett et al.
2004), developed as part of the M-Zones research
programme (M-Zones 2005); which approaches
management of ubiquitous computing environments,
specifically smart spaces, by introducing the concept
of “Managed Zones” (M-Zones) corresponding to
administrative domains encompassing one or more
distinct smart spaces. The UMA adopts a policy-
based management approach to facilitate intra- and
inter- smart space management, with policy decision
points (PDPs) organised in two levels, following the
hierarchical approach described in (Ghamri-
Doudane et al. 2004). The PDP at the upper
(M-Zone) level is responsible for all high level
policies relating to the administration of the smart
spaces. At the lower (smart space) level PDPs and
PEPs control the discovery and execution of
services. Ongoing decision making relating to access
rights occurs at the M-Zone level, with access rights
being communicated to individual smart spaces in
the form of access control lists, which are enforced
by the local PDP and PEPs.
There are two other UMA components involved
in access control: the Context Information Manager
(CIM) and Personal Information Managers (PIMs).
The CIM is responsible for gathering, aggregating
and semantically enhancing context information
subscribed to by the M-Zone PDP and notifying the
M-Zone PDP when context changes occur. Each
user has associated with him/her a PIM, which stores
their user profiles, preferences and policies, and also
acts as their interface to the system. Operation of the
CIM and PIMs is described in (Barrett et al. 2004).
USER-CENTRIC ADAPTIVE ACCESS CONTROL AND RESOURCE CONFIGURATION FOR UBIQUITOUS
COMPUTING ENVIRONMENTS
351
3.1 MAC Process Operation
The MAC process is responsible for reaching access
control policy decisions and for collating relevant
information from other UMA components needed to
inform these decisions. Access rights are assigned
based on policies relating to the smart spaces
themselves – “system” policies, and “user” policies
(retrieved from the PIMs of users currently present
in the smart space), in response to context change
events notified by the CIM.
The MAC process is realised via a XACML
policy engine (Sun Microsystems 2005), which
allows for reaching policy decisions on the basis of
the values arbitrary user attributes – which in our
case are stored in user PIMs, or values of attributes
of the environment itself (as notified by CIM context
events). As well as re-configuring access rights, the
MAC process analyses whether user policies
indicate that specified actions be requested as a
result of the notified event. For example, users may
desire that configuration actions be taken to protect
their privacy in the presence of users unknown to
them. Once the process has been completed PDPs at
the smart space level are forwarded new access
control lists to be enforced for users currently in the
space, and configuration actions generated from
analysis of user policies.
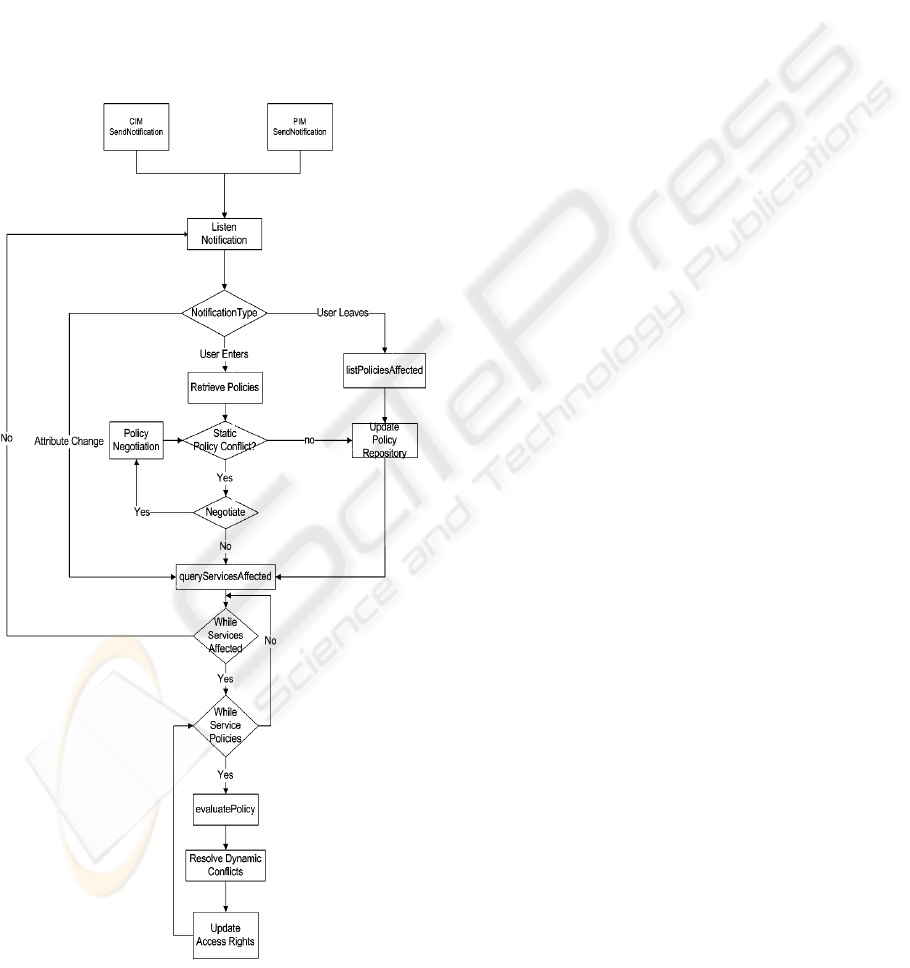
Figure 1 below outlines the flow concerning the
access control decision mechanism implemented by
the MAC process. The MAC process subscribes to
the relevant components (PIM/CIM) in order to be
notified should an event that requires access control
decisions. Events that are typically monitored
include the entry/exit of users or the changing of an
attribute value that was considered as a condition of
an active policy. When a user enters the smart space
in question the MAC process retrieves the relevant
user policies from the respective PIM. Static policy
conflict detection is then carried out with respect to
system and user policies in order to eliminate
redundant policies and (re-)deploy the relevant
policies. The MAC process then evaluates the
respective access rights for the resources in question.
This is achieved through iterating through the
applicable policies governing the specific resources.
Should the event the MAC process has been notified
of concern the change in the value of a relevant
attribute, this again necessitates the identification of
relevant polices and iteration through the various
polices in order to reconfigure the access rights
concerned.
Central to the success of the MAC process in
providing an adaptive access control is its ability to
detect and resolve conflicts between various user
and system policies. The MAC process extends the
XACML policy engine’s policy conflict/detection
resolution facilities to realise configurable policy
precedence schemes, by allowing specification of
sets of attributes based on which precedence can be
evaluated. Thus, how a scheme is implemented will
be environment-specific, but will be based on
appropriate attributes, for example security levels, or
date/time. Our implementation targets an office
environment (see §4.1), and ranks policies based on
the resource in question, the policy author’s
organisation role, policy author’s project affiliation,
policy author’s smart space role (for example,
presenter) and the project context in which resource
is being accessed.
Figure 1: MAC Process Flow Chart
ICEIS 2005 - INFORMATION SYSTEMS ANALYSIS AND SPECIFICATION
352
4 IMPLEMENTATION AND CASE
STUDY
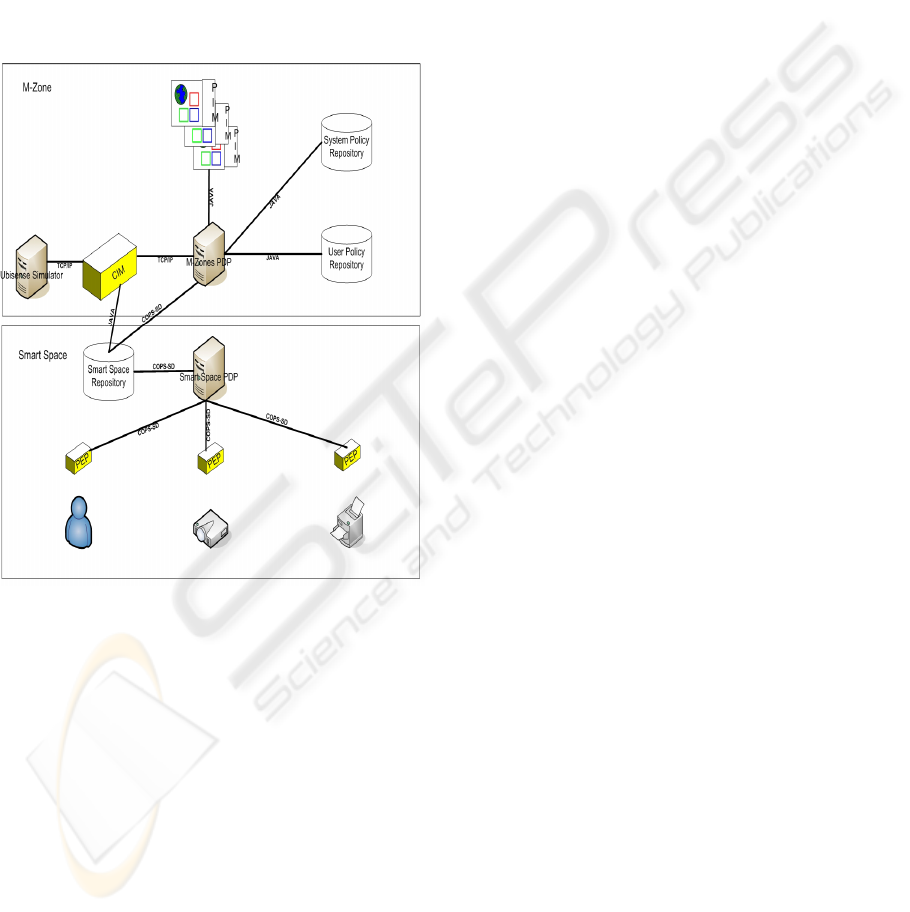
Figure 2 below illustrates the test bed in which the
MAC process has been deployed. For the test bed,
the Ubiquitous Management Architecture has been
partially deployed onto the TSSG/O
2
Home of the
Future ubiquitous computing environment
(TSSG/O
2
2005). Access to resources and services is
managed through the policy-based management
system described in (Ghamri-Doudane 2004), which
is based on the COPS-SD protocol.
Figure 2: Test bed Architecture
The test bed consists of a number of PEPs
controlling household devices by means of UPnP,
Jini and proprietary approaches to service discovery
and resource access. PEPs have COPS-SD wrappers
to allow them communicate with their smart space
PDP. Access to devices in the test-bed is ultimately
controlled by the M-Zone PDP’s MAC process,
which uses COPS-SD to inform the smart space
PDP of access rights to enforce. To test the
operation of the MAC process a COPS-SD wrapped
PEP was developed; this PEP controls a HP
projector – the device used to realise the office-
based use case scenario as described in §4.1.
The PIM has been implemented as a web service
to host the user profiles. When a user initially enters
an M-Zone they provide a link to their PIM, which
will then be queried for the credentials required for
authentication. The PIM also acts as a repository for
user policies, including those dictating desired
actions in the presence of other users. The PIM
provides notifications to the M-Zone PDP if user
attributes or policies are modified by a PIM, as, in
many cases, these modifications will necessitate
reconfiguration of access policies, or generation of
new configuration action requests.
Context notifications, specifically user location
and presence information are generated using the
Ubisense simulator software (Ubisense Ltd. 2005),
which has been used to model the movement of
individuals along predefined paths through an office
environment equipped with ultra-wideband (UWB)
location detection. The current CIM implementation
passes on context notifications as requested by the
M-Zone PDP, expressing them in ontological terms
understood by the MAC process. In the future the
test-bed will be further developed to allow the CIM
implementation gather information from a real
Ubisense UWB location detection system, as
opposed to simulated data.
4.1 Office-based Access Control Case
Study
We now discuss a use case scenario in order to
illustrate the MAC process functionality, in
particular, how access rights adapt to the changing
user set present and how policy conflicts are
handled. The scenario concerns a meeting room
owned by Company X, in which a projector service
is used by meeting participants.
Bill is a project manager and Alice is an
accountant; both are assigned to the M-Zones
project, and are conducting a meeting together, in
which Alice is presenting the project accounts using
the projector service. Both have been previously
authenticated and authorised regarding the various
services, including the projector service, available in
the meeting room smart space. Bill has defined a
policy which permits all users to use the projector
service at all times. On the other hand Alice has
specified a policy that denies her access to the
projector service should a non M-Zones project
member enter the room. This is to prevent
unauthorised users seeing sensitive financial
information relating to the project, so, if a guest
enters the meeting room her access to the project is
revoked, thus her presentation will be immediately
removed from the projector. Clearly, these policies
conflict with each other. However the precedence
scheme for the meeting room is configured such that
policies specified by a user currently presenting and
thus a presenter smart space role and accountant
organisational role always have precedence over
USER-CENTRIC ADAPTIVE ACCESS CONTROL AND RESOURCE CONFIGURATION FOR UBIQUITOUS
COMPUTING ENVIRONMENTS
353

policies specified by a user that has a manager
organisational role and an audience smart space role,
thus in this case Alice’s policy is enforced. This
contrasts with typical “Higher Authority Overrides
Lower Authority” based approaches where policies
specified by users higher in the company hierarchy
have precedence over those specified by users lower
in the hierarchy (which would favour Bill in our
scenario).
Bob, a guest, now enters the meeting room. The
MAC Process receives notification via the
subscription/notification agreement it has with the
CIM. The notification triggers the assignment of
access rights to the new entrant based on system
policies and any relevant policies of other users in
the space. In this case the MAC Process examines
the relevant policies governing access to the
projector service. This leads to a conflict between
Bill and Alice’s policies. The precedence scheme
employed favours Alice’s policy as outlined above;
thus her own access to the projector service is
revoked, and the projector is blanked before Bill has
a chance to see any potentially sensitive information.
5 SUMMARY
This paper has outlined an approach to access
control in ubiquitous computing environments that
realises adaptive, attribute based access control,
based on analysis of both, system and user-defined
policies. It harnesses context information relating to
the user set present in a physical space and the
context in which resources are accessed, as inputs
into the access right configuration process.
Furthermore, based on preferences specified in user
policies, it supports automatic configure of resources
in response to changes in the profile of this user set.
Policy conflict detection and resolution is also
addressed: a resolution scheme based on
configurable assignment of policy precedence based
on arbitrary attributes relating to both users and
environmental context was described.
The approach allows the organisation
administering the ubiquitous computing infra-
structure to set policies governing default access
rights associated with users, but also gives users
themselves scope to dynamically modify access
rights of others and to ensure that the environment is
automatically configured to ensure their privacy is
protected. Management functionality is therefore
partially the responsibility of the user, resulting in a
more user-centric system that adapts to changing
user needs, but not in a manner that violates system-
wide policies.
REFERENCES
Barrett K., Carroll R., Osmani V. and van der Meer S.
(2004), User-centric Management of Ubiquitous
Environments: Challenges and Initial Solutions, in
Wade V. (ed), Proc. 2
nd
Int’l Workshop on Managing
Ubiquitous Communications and Services (MUCS
2004), Dublin, Ireland, December 2004;
Corradi A., Montanari R. and Tibaldi D. (2004), Context-
based Access Control Management in Ubiquitous
Environments, Proc. Third IEEE Int. Symp. on
Network Computing and Applications (NCA’04),
253-260;
Dunlop N., Indulska J. and Raymond K. (2003), Methods
for Conflict Resolution in Policy-Based Management
Systems, in Proc. 7th IEEE International Enterprise
Distributed Object Computing Conference
(EDOC’2003), Brisbane, Sept 2003, 98-109;
Ghamri-Doudane S., van der Meer S., O’Connor R.,
Ghamri-Doudane Y. and Agoulmine N. (2004),
Resources Discovery and Management Using Policies
in Smart Spaces, in Proc. Workshop of the 11
HP
OpenView University Association (HPOVUA 2004),
Paris, June 2004;
th
Godik S., Moses T. (eds.) (2003), eXtensible Access
Control Markup Language (XACML) Version 1.0,
OASIS Standard, available (15/2/2005):
http://www.oasis-open.org;
Kagal L., Finin T. and Joshi A. (2001), Trust-Based
Security in Pervasive Computing Environments, IEEE
Computer, 34(12):154-157;
Lepro R. (2003), Cardea: Dynamic Access Control in
Distributed Systems, NAS Technical Report
NAS-03-020;
Lupu E. C. and Sloman M. (1999), Conflicts in Policy-
based Distributed Systems Management, IEEE Trans.
on Software Engineering, 25(6):852-868;
M-Zones research programme, information available
(15/2/2005): http://www.m-zones.org;
Sampemane G., Naldurg P. and Campbell R. (2002),
Access Control for Active Spaces, Proc. 18th Annual
Computer Security Applications Conference, 343-352;
Sun Microsystems (2005), SunXACML Implementation,
information available (15/2/2005):
http://sunxacml.sourceforge.net;
TSSG/O
2
Home of the Future Smart Home
Demonstration, information available (15/2/2005):
http://www.o2home.com;
Ubisense Ltd. (2005), Ubisense Product Description:
Simulator Module, Information available (15/2/2005):
http://ubisense.net/Software/Simulate%20environment
s.htm.
ICEIS 2005 - INFORMATION SYSTEMS ANALYSIS AND SPECIFICATION
354
