
A Formal Semantics for the Business Process Execution
Language for Web Services
Roozbeh Farahbod, Uwe Gl
¨
asser and Mona Vajihollahi
Software Technology Lab
School of Computing Science
Simon Fraser University
Burnaby, B.C., Canada
Abstract. We define an abstract operational semantics for the Business Process
Execution Language for Web Services (BPEL) based on the abstract state ma-
chine (ASM) formalism. This way, we model the dynamic properties of the key
language constructs through the construction of a BPEL abstract machine in
terms of a distributed real-time ASM. Specifically, we focus here on the process
execution model and the underlying execution lifecycle of BPEL activities. The
goal of our work is to provide a well defined semantic foundation for establish-
ing the key language attributes. The resulting abstract machine model provides a
comprehensive and robust formalization at three different levels of abstraction.
Keywords: Web Services Orchestration, BPEL4WS, Abstract Operational Se-
mantics, Abstract State Machines, Requirements Specification
1 Introduction
In this paper, we present an abstract operational semantics of the XML based Business
Process Execution Language for Web Services (BPEL4WS) [1], a novel Web Services
orchestration language proposed by OASIS [2] as a future standard for the e-business
world. BPEL4WS, or BPEL for short, provides distinctive expressive means for de-
scribing the process interfaces of Web based business protocols and builds on existing
standards and technologies for Web Services. It is defined on top of the service in-
teraction model of W3C’s Web Services Description Language (WSDL) [3]. A BPEL
business process orchestrates the interaction between a collection of abstract WSDL
services exchanging messages over a communication network.
Based on the abstract state machine (ASM) formalism [4], we define a BPEL ab-
stract machine, called BPEL
AM
, as a concise and robust semantic framework for mod-
eling the key language attributes in a precise and well defined form. That is, we for-
malize dynamic properties of the Web Services interaction model of a BPEL business
process in terms of finite or infinite abstract machine runs. Due to the concurrent and
reactive nature of Web Services and the need for dealing with time related aspects in
coordinating distributed activities, we combine an asynchronous execution model with
an abstract notion of real time. The resulting computational model is referred to as
a distributed real-time ASM. Our model captures the dynamic properties of the key
Farahbod R., Glässer U. and Vajihollahi M. (2005).
A Formal Semantics for the Business Process Execution Language for Web Services.
In Proceedings of the Joint Workshop on Web Services and Model-Driven Enterprise Information Systems, pages 144-156
DOI: 10.5220/0002576901440156
Copyright
c
SciTePress

language constructs defined in the language reference manual [1], henceforth called
the LRM, including concurrent control structures, dynamic creation and termination of
service instances, communication primitives, message correlation, event handling, and
fault and compensation handling.
The goal of our work is twofold. First and foremost, BPEL
AM
provides a firm se-
mantic foundation for checking the consistency and validity of the language definition
by conceptual means and by analytical means. Formalization is crucial for identifying
and eliminating deficiencies that otherwise remain hidden in the informal language def-
inition of the LRM [2, Issue #42]: “There is a need for formalism. It will allow us to not
only reason about the current specification and related issues, but also uncover issues
that would otherwise go unnoticed. Empirical deduction is not sufficient.”
Second, we address pragmatic issues resulting from previous experience with other
industrial standards, including the ITU-T language SDL
1
[6] and the IEEE language
VHDL [7]. An important observation is that formalization techniques and supporting
tools for practical purposes such as standardization call for a gradual formalization of
abstract requirements with a degree of detail and precision as needed [8]. To avoid a gap
between the informal language definition and the formal semantics, the ability to model
the language definition as is without making compromises is crucial. Consequently, we
adopt here the view and terminology of the LRM, effectively formalizing the intuitive
understanding of BPEL as directly as possible in an objectively verifiable form.
The result of our work is what is called an ASM ground model [4] of BPEL. Intu-
itively, ground models serve as ‘blueprints’ for establishing functional software require-
ments, including their elicitation, clarification and documentation. Constructing such a
ground model requires a major effort — especially, as a clear architectural view, which
is central for dealing with complex semantic issues, is widely missing in the BPEL
language definition.
The paper is organized as follows. Section 2 briefly summarizes the formal semantic
framework. Section 3 introduces the core of our hierarchically defined BPEL
AM
, and
Section 4 then addresses important extensions to the BPEL
AM
core. Section 5 discusses
related work, and Section 6 concludes the paper.
2 Distributed Real-time ASM
We briefly outline the formal semantic framework at an intuitive level of understand-
ing using common notions and structures from discrete mathematics and computing
science. For details, we refer to the existing literature on the theory of abstract state
machines [9] and their applications [4].
2
We focus here on the asynchronous ASM model, called distributed abstract state
machine (DASM), as formal basis for modeling concurrent and reactive system behav-
ior in terms of abstract machine runs. A DASM M is defined over a given vocabulary
V by its program P
M
and a non-empty set I
M
of initial states. V consists of symbols
denoting the various semantic objects and their relations in the formal representation
1
Our ASM semantic model of SDL is part of the current SDL standard defined by the Interna-
tional Telecommunication Union [5].
2
See also the ASM Web site at www.eecs.umich.edu/gasm.
145

of M , where we distinguish domain symbols, function symbols and predicate symbols.
Symbols that have a fixed interpretation regardless of the state of M are called static;
those that may have different interpretations in different states of M are called dynamic.
A state S of M yields a valid interpretation of all the symbols in V .
Concurrent control threads in an execution of P
M
are modeled by a dynamic set
AGENT of autonomously operating agents. Agents of M interact with each other by
reading and writing shared locations of global machine states, where the underlying
semantic model regulates such interactions so that potential conflicts are resolved ac-
cording to the definition of partially ordered runs [4].
P
M
consists of a statically defined collection of agent programs, each of which
defines the behavior of a certain type of agent in terms of state transition rules. The
canonical rule consists of a basic update instruction of the form f (t
1
, t
2
, ..., t
n
) := t
0
,
where f is an n-ary dynamic function symbol and the t
i
s (0 ≤ i ≤ n) are terms.
Intuitively, one can conceive a dynamic function as a function table where each row
associates a sequence of argument values with a function value. An update instruction
specifies a pointwise function update, i.e., an operation that replaces an existing function
value by a new value to be associated with the given arguments.
Finally, M models the embedding of a system into a given environment — the
external world — through actions and events as observable at interfaces. The external
world affects operations of M through externally controlled or monitored functions.
Such functions change their values dynamically over runs of M , although they cannot
be updated by agents of M. A typical example is the representation of time by means
of a nullary monitored function now taking values in a linearly ordered domain TIME.
Intuitively, now yields the time as measured by some external clock.
3 BPEL Abstract Machine
This section introduces the core components of BPEL
AM
architecture and the under-
lying abstraction principles starting with a brief characterization of the key language
features as defined in [1]. We then present BPEL’s process execution model and its
decomposition into execution lifecycles of basic and structured activities. As a con-
crete example of a structured activity dealing with concurrency and real-time aspects,
we consider the pick activity. The architectural view, the decomposition into execution
lifecycles, and the model of pick are new and not contained in [10].
BPEL introduces a stateful model of Web Services interacting by exchanging se-
quences of messages between business partners. A BPEL process and its partners are
defined as abstract WSDL services using abstract messages as defined by the WSDL
model for message interaction. The major parts of a BPEL process definition consist
of (1) partners of the business process (Web services that this process interacts with),
(2) a set of variables that keep the state of the process, and (3) an activity defining the
logic behind the interactions between the process and its partners. Activities that can be
performed by a business process are categorized into basic activities, structured activi-
ties and scope-related activities. Basic activities perform simple operations like receive,
reply, invoke and others. Structured activities impose an execution order on a collection
146
of activities and can be nested. Scope-related activities enable defining logical units of
work and delineating the reversible behaviour of each unit.
Dynamic Process Creation A BPEL process definition works as a template for
creating business process instances. Process creation is implicit and is done by defin-
ing a start activity, which is either a receive or a pick activity that is annotated with
‘createInstance = yes’, causing a new process instance to be created upon receiving
a matching message. That is, when a new instance of a business process is created, it
starts its execution by receiving the message that triggered its creation.
Correlation and Data Handling A Web service consists of a number of business
process instances; thus, the messages arriving at a specific port must be delivered to the
correct process instance. BPEL introduces a generic mechanism for dynamic binding
of messages to process instances, called correlation.
Long Running Business Transactions Business processes normally perform trans-
actions with non-negligible duration involving local updates at business partners. When
an error occurs, it may be required to reverse the effects of some or even all of the previ-
ous activities. This is known as compensation. The ability to compensate the effects of
previous activities in case of an exception enables so-called Long-Running (Business)
Transactions (LRTs).
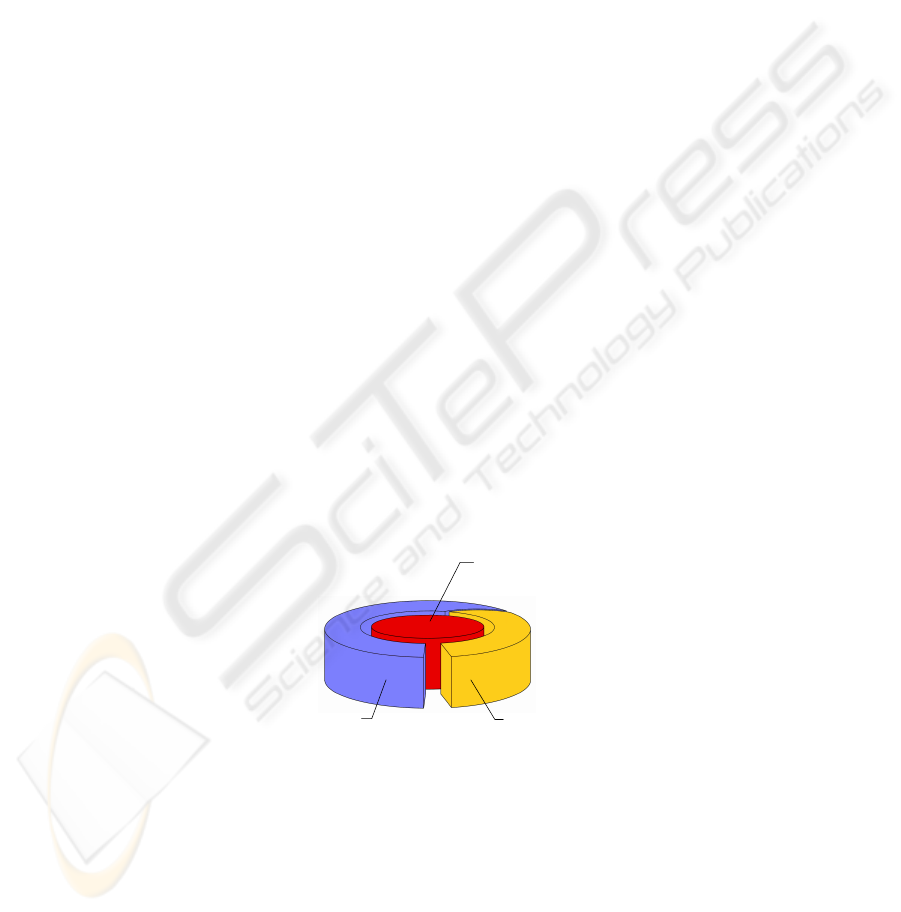
3.1 Abstract Machine Architecture
Logically, BPEL
AM
consists of three basic building blocks referred to as core, data
handling extension, and fault and compensation extension (Figure 1). The core handles
dynamic process creation/termination, communication primitives, message correlation,
concurrent control structures, as well as the following activities: receive, reply, invoke,
wait, empty, sequence, switch, while, pick and flow. The core does not consider data
handling, fault handling, and compensation behavior. Rather these aspects are treated
as extensions to the core (see Section 4). Together with the core these extensions form
the complete BPEL
AM
.
The core of the
BPEL Abstract Machine
Fault/Compensation
extension
Data Handling
extension
Fig.1. BPEL
AM
Behavioural Decompositionam
The vertical organization of the machine architecture consists of three layers, called
abstract model, intermediate model and executable model. The abstract model formally
147
sketches the behavior of the key BPEL constructs, while the intermediate model, ob-
tained as the result of the first refinement step, provides a complete formalization. Fi-
nally, the executable model provides an abstract executable semantics implemented in
AsmL [8]. A GUI facilitates experimental validation through simulation and animation
of abstract machine runs.
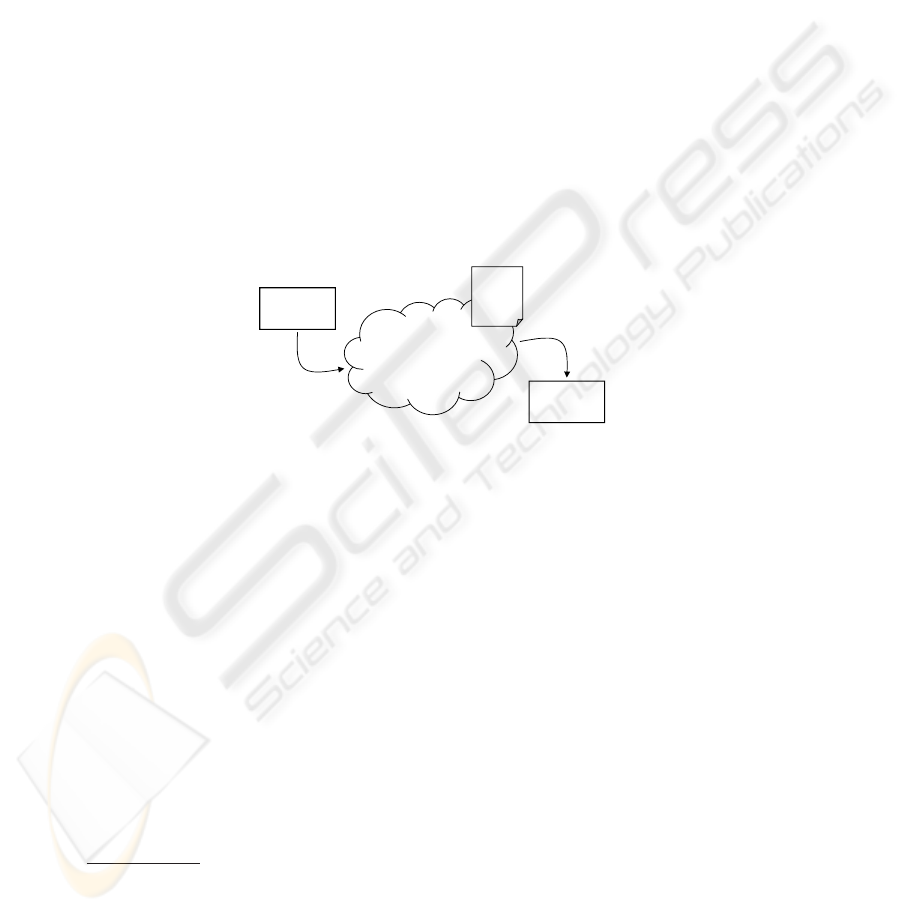
Figure 2 shows an abstract view of the underlying Web Services interaction model.
A BPEL document abstractly defines a Web service consisting of a collection of busi-
ness process instances. Each such instance interacts with the external world through
two interface components, called inbox manager and outbox manager. The inbox man-
ager handles all the messages that arrive at the Web service. If a message matches a
request from a local process instance waiting for that message, it is forwarded to this
process instance. Additionally, the inbox manager also deals with new process instance
creation. The outbox manager, on the other hand, forwards outbound messages from
process instances to the network.
Inbox manager, outbox manager, and process instances are modeled by three differ-
ent types of DASM agents: the inbox manager agent, the outbox manager agent, and
one uniquely identified process agent for each of the process instances.
Outbox
Manager
Inbox
Manager
BPEL
process
definition
Web Service
a collection of
business process
instances
Fig.2. High-level Structure of BPEL
AM
3.2 Activity Execution Lifecycle
Intuitively, the execution of a process instance is decomposed into a collection of ex-
ecution lifecycles for the individual BPEL activities. We therefore introduce activity
agents, created dynamically by process agents for executing structured activities. Each
activity agent dynamically creates additional activity agents for executing nested, struc-
tured activities. Similarly, it creates auxiliary activity agents for dealing with concurrent
control threads (like in flow and pick
3
). For instance, to concurrently execute a set of ac-
tivities, a flow agent assigns each enclosed activity to a separate flow thread agent [10].
At any time during the execution of a process instance, the DASM agents running under
control of this process agent form a tree structure where each of the sub-agents mon-
itors the execution of its child agents (if any) and notifies its parent agent in case of
3
One may argue that pick is not a concurrent control construct, but as we will see in Section
3.3, it can naturally be viewed as such.
148
Execution is
completed
There is more to
be executed /
Fetch next activity
Execution of the
enclosed activity
is completed
Executing
activity
Initialization
There is nothing to
be executed
Started
Completed
Activity
Completed
Running
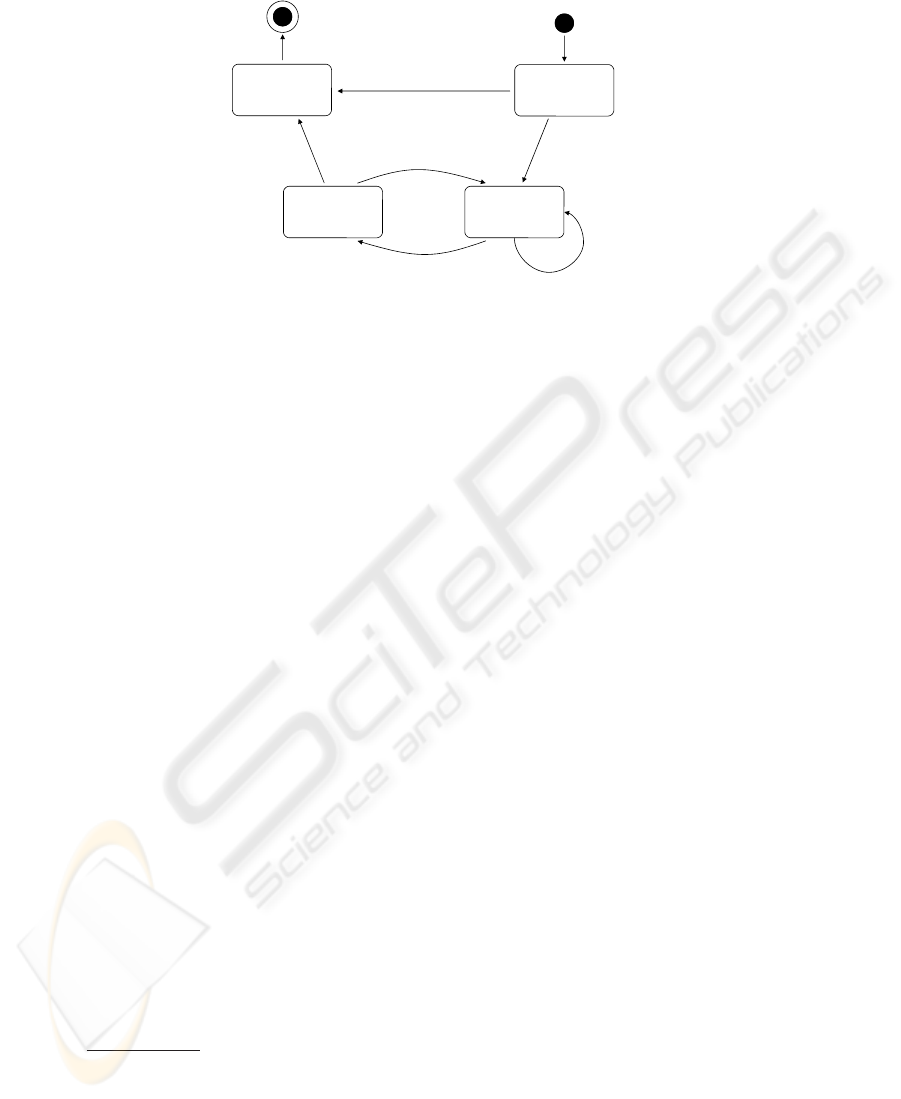
Fig.3. Activity Execution Lifecycle: BPEL
AM
core
normal completion or fault. This structure provides a general framework for execution
of BPEL activities. The DASM agents that model BPEL process execution are jointly
called kernel agents. They include process agents and subprocess agents. In the core,
however, subprocess agents are identical to activity agents.
Figure 3 illustrates the normal activity execution lifecycle of kernel agents in the
BPEL
AM
core. When created, a kernel agent is in the Started mode. After initialization,
the kernel agent starts executing its assigned task by switching its mode to Running.
Upon completion, the agent switches its mode to Activity-Completed and decides (based
on the nature of the assigned task) to either return to the Running mode or finalize
the execution and become Completed. Activity agents that may execute more than one
activity (like sequence) or execute one activity more than once (like while) can switch
back and forth between the two modes Activity-Completed and Running.
3.3 Pick activity
A pick activity identifies a set of events and associates with each of these events a
certain activity. Intuitively, it waits on one of the events to occur and then performs
the respective activity; thereafter, the pick activity no longer accepts any other event.
4
There are basically two different types of events: onMessage events and onAlarm
events. An onMessage event occurs as soon as a related message is received, whereas
an onAlarm event is triggered by a timer mechanism waiting ‘for’ a certain period of
time or ‘until’ a certain deadline is reached.
In BPEL
AM
, each pick activity is modeled by a separate activity agent, called pick
agent. A pick agent is assisted by two auxiliary agents, a pick message agent that is
waiting for a message to arrive, and a pick alarm agent that is watching a timer. We
formalize the semantics of the pick activity in several steps, each of which addresses
4
Regarding the case that several events occur at a time, the LRM is somewhat loose declaring
that the choice “is dependent on both timing and implementation.” [1]
149
a particular property, and then compose the resulting DASM program, called PickPro-
gram in which self refers to a pick agent executing the program.
Pick Agent
PickProgram ≡
case execMode(self) of
Started → PickAgentStarted
Running → PickAgentRunning
ActivityCompleted → FinalizePickAgent
Completed → stop self
When created, the pick agent is in the Started mode and initializes its execution
by creating a pick alarm agent and a pick message agent. It then switches its mode to
Running and waits for an event to occur — either a message arrived or a timer expired.
Pick Agent
PickAgentRunning ≡
if normalExecution(self ) then
onsignal s : AGENT
COMPLETED
execMode(self) := ActivityCompleted
otherwise
if chosenAct(self) = undef then
choose dsc ∈ occurredEvents(self ) with MinTime(dsc)
chosenAct(self) := onEventAct(edscEvent(dsc))
// onEventAct is the activity associated with an event
else
ExecuteActivity(chosenAct(self)))
Depending on the event type, either the pick message agent or the pick alarm agent
notifies the pick agent by adding an event descriptor to the occuredEvents set of the
pick agent. An event descriptor contains information on the event such as the time of
its occurrence. When an event occurs, the pick agent updates the function chosenAct
(with initial value undef) with the activity associated with the event. Once the activity
is chosen (chosenAct(self) 6= undef), the pick agent performs the chosen activity and
remains Running until the execution of the chosen activity is completed as indicated
by a predicate chosenActCompleted. It then switches its execution mode to Activity-
Completed.
Finalizing a running pick agent includes informing its parent agent that the exe-
cution is completed and changing the execution mode to Completed. As illustrated in
Figure 3, the Completed mode leads to the agent’s termination.
Due to the space limitations, we do not show here the definitions of PickAgent-
Started, FinalizePickAgent, as well as the programs of the pick message and the pick
alarm agents, but refer to [11,12] for a complete description.
4 Extensions to the BPEL
AM
Core
For a clear separation of concerns and also for robustness of the formal semantic model,
the aspects of data handling, fault handling and compensation behavior are carefully
150

separated from the core of the language. To this end, the core of BPEL
AM
provides a
basic, yet comprehensive, model for abstract processes in which data handling focuses
on protocol relevant data in the form of correlations while payload data values are left
unspecified [1].
Compensation and fault handling behavior is a fairly complex issue in the definition
of BPEL. An in-depth analysis in fact shows that the semantics of fault and compensa-
tion handling, even when ignoring all the syntactical issues, is related to more than 40
individual requirements spread out all over the LRM. These requirements (some of them
comprise up to 10 sub-items) address a variety of separate issues related to the core se-
mantics, general constraints, and various special cases (see [2]). A thorough treatment
of the extensions is beyond the space limitations of this paper. Thus, we present an
overview of the fault handling behavior in the following sections and refer to [11] for a
comprehensive description.
4.1 Scope activity
The scope activity is the core construct of data handling, fault handling, and compen-
sation handling in BPEL. A scope activity is a wrapper around a logical unit of work (a
block of BPEL code) that provides local variables, a fault handler, and a compensation
handler. The fault handler of a scope is a set of catch clauses defining how the scope
should respond to different types of faults. A compensation handler is a wrapper around
a BPEL activity that compensates the effects of the execution of the scope. Each scope
has a primary activity which defines the normal behavior of the scope. This activity
can be any basic or structured activity. BPEL allows scopes to be nested arbitrarily. In
BPEL
AM
, we model scopes by defining a new type of activity agents, called scope
agents.
Fault handling in BPEL can be thought of as a mode switch from the normal exe-
cution of the process [1]. When a fault occurs in the execution of an activity, the fault
is thrown up to the innermost enclosing scope. If the scope handles the fault success-
fully, it sends an exited signal to its parent scope and ends gracefully, but if the fault is
re-thrown from the fault handler, or a new fault has occurred during the fault handling
procedure, the scope sends a faulted signal along with the thrown fault to its parent
scope. The fault is thrown up from scopes to parent scopes until a scope handles it suc-
cessfully. A successful fault handling switches the execution mode back to normal. If a
fault reaches the global scope, the process execution terminates [1].
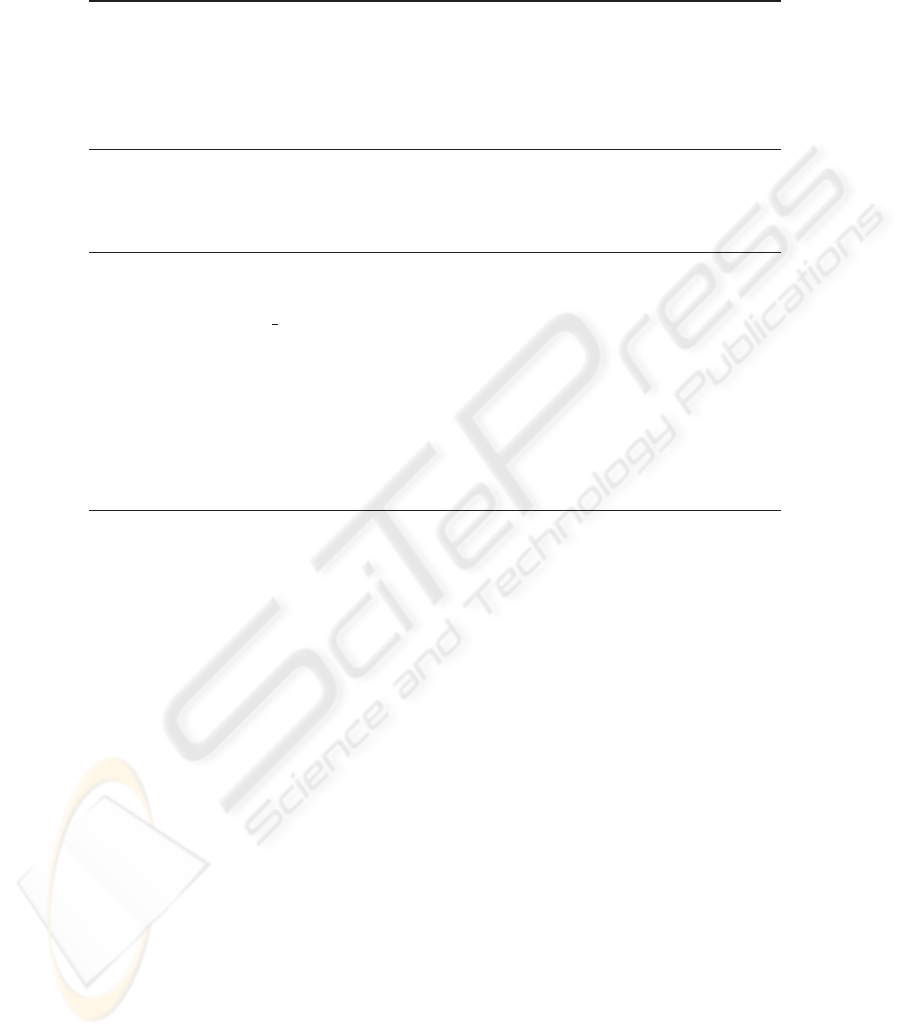
The normal execution lifecycle of the process execution model (Figure 3) needs to
be extended to comprise the fault handling mode of BPEL processes. The occurrence
of a fault causes the kernel agent (be it an activity agent or the main process) to leave
its normal execution lifecycle and enter a fault handling lifecycle. Figure 4 illustrates
the extended execution lifecycle of BPEL activities.
In BPEL
AM
, whenever a sub-process agent encounters a fault, the agent leaves
its normal execution mode and enters the Execution-Fault mode. If this agent is not a
scope agent, it informs its parent agent of the fault and stays in the Execution-Fault
mode until it receives a notification for termination. On the other hand, if the faulted
agent is a scope agent, it terminates its enclosing activity, creates a fault handler, assigns
the fault to that handler, and switches to the Fault-Handling mode. If the fault handler
151
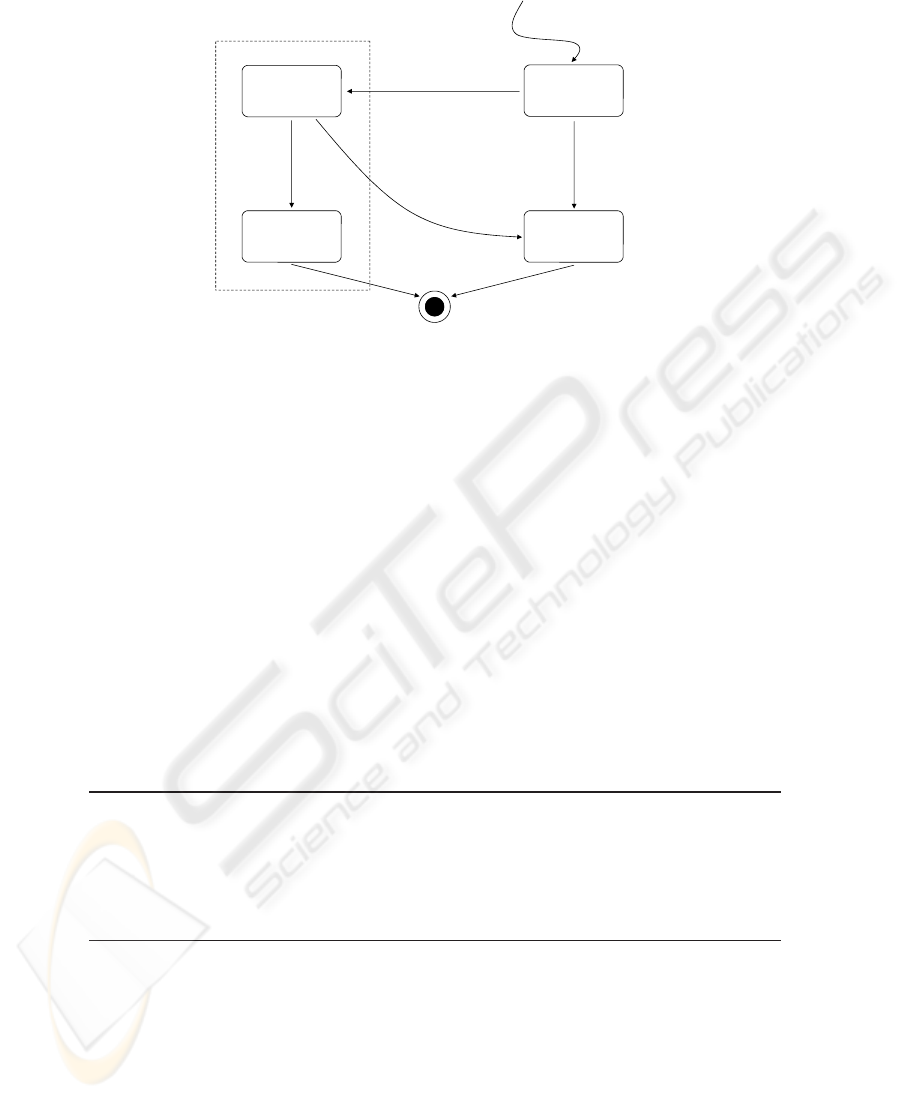
A fault occurs
It is not
a scope agent /
Notify parent
agent.
It is a scope agent /
Start fault handler
agent.
Fault handler
throws a fault
Fault handler
completed
successfully
Execution
Fault
Exited
Fault
Handling
Faulted
Fig.4. Activity Execution Lifecycle: Fault Handling
finishes successfully, the scope agent enters the Exited mode indicating that this agent
exited its execution with a successful fault handling process. The difference between
a scope which has finished its execution in the Completed mode and a scope that has
finished in the Exited mode is reflected by the way scopes are compensated, which we
do not further address in this paper.
4.2 Pick activity: extended
The structured activities of the core (activity agents) are also refined to capture the fault
handling behavior of BPEL. The well-defined activity execution lifecycle of BPEL
AM
(Figures 3 and 4) along with the fact that the fault handling behavior of BPEL is mostly
centered in the scope activity, enable us to generally extend the behavior of structured
activities by defining two new rules: HandleExceptionsInRunningMode and WaitForTer-
mination. As an example, the pick agent program of Section 3.3 is refined as follows:
Pick Activity Extended
PickProgram ≡
PickProgram
core
case execMode(self) of
Running → HandleExceptionsInRunningMode
ExecutionFault → WaitForTermination
Faulted → stop self
Activity agents react to a fault by informing their parent agent of the fault and stay in
the Execution-Fault mode until they receive a notification for termination. If the parent
agent is not a scope agent, the parent agent reacts in the same way and the fault is passed
upwards until it reaches a scope agent. The scope agent handles the fault as described
in Section 4.1, and sends a termination notification to its child agent. Upon receiving
the notification, a sub-process agent that is waiting for a termination notification in
152

turn passes it to its child agents (if any) and enters the Faulted mode, where it then
terminates. If a sub-process agent receives a termination notification while in its normal
execution mode, it first enters the Execution-Fault mode and then reacts as if it were
waiting for the notification.
The normal execution of activity agents in the Running mode is extended by the
following rule:
Structured Activity Extended
HandleExceptionsInRunningMode ≡
if faultExtensionSignal(self ) then
onsignal s : AGENT
EXITED
execMode(self) := ActivityCompleted
otherwise
onsignal s : AGENT
FAULTED
TransitionToExecutionFault(fault(s))
otherwise
onsignal s : FORCED
TERMINATION
faultThrown(self) := fault(s)
PassForcedTerminationToChildren(fault(s))
execMode(self) := emExecutionF ault
In the Execution-Fault mode, if a termination notification is received, the pick agent
terminates its enclosing activity and goes to the Faulted mode. Analogously to the Com-
pleted mode, sub-process agents terminate their execution in the Faulted mode. For the
complete extended pick agent program see [12].
5 Related work
There are various research activities to formally define, analyze, and verify Web Ser-
vices orchestration languages. A group at Humboldt University is working on formal-
izations of BPEL for analysis, graphics and semantics [13]. Specifically, they use Petri-
nets and ASMs to formalize the semantics of BPEL. However, the pattern-based Petri-
Net semantics of BPEL [14] does not capture fault handling, compensation handling,
and timing aspects; overall, the feasibility of verifyingmore complex business processes
is not clear and still subject to future work. The ASM semantic model in [15] closely
follows what we had presented in [16] with minor technical differences in handling
basic activities and variables.
Formal verification of Web Services is addressed in several papers. The SPIN model-
checker is used for verification [17] by translating Web Services Flow Language (WSFL)
descriptions into Promela. [18] uses a process algebra to derive a structural operational
semantics of BPEL as a formal basis for verifying properties of the specification. In
[19], BPEL processes are translated to Finite State Process (FSP) models and compiled
into a Labeled Transition System (LTS) which is used as a basis for verification. [20]
presents a model-theoric semantics (based on situation calculus) for the DAML-S lan-
guage which facilitates simulation, composition, testing, and verifying compositions of
Web Services.
153

6 Conclusions
We formally define a BPEL abstract machine in terms of a distributed real-time ASM
providing a precise and well defined semantic foundation for establishing the key se-
mantic concepts of BPEL. Transforming informal requirements into precise specifi-
cations facilitates reasoning about critical language attributes, exploration of different
design choices and experimental validation. As a result of our formalization, we have
discovered a number of weak points in the LRM [12].
The dynamic nature of standardization calls for flexibility and robustness of the
formalization approach. To this end, we feel that the ASM formalism and abstraction
principles offer a good compromise between practical relevance and mathematical ele-
gance — already proven useful in other contexts [6]. Our model can serve as a starting
point for formal verification (considering formal specification as a prerequisite for for-
mal verification). Beyond inspection by analytical means, we also support experimental
validation by making our abstract machine model executable using the executable ASM
language AsmL [21].
References
1. Andrews, T., et al.: Business process execution language for web services version
1.1 (2003) Last visited Feb. 2005, http://www-106.ibm.com/developerworks/
webservices/library/ws-bpel.
2. Organization for the Advancement of Structured Information Standards (OASIS): WS BPEL
issues list. (2004) http://www.oasis-open.org.
3. W3C: Web Services Description Language (WSDL) Version 1.2 Part 1: Core
Language. (2003) Last visited May 2004, http://www.w3.org/TR/2003/
WD-wsdl12-20030303.
4. B
¨
orger, E., St
¨
ark, R.: Abstract State Machines: A Method for High-Level System Design
and Analysis. Springer-Verlag (2003)
5. ITU-T Recommendation Z.100 Annex F (11/00): SDL Formal Semantics Definition. Inter-
national Telecommunication Union. (2001)
6. Gl
¨
asser, U., Gotzhein, R., Prinz, A.: The formal semantics of sdl-2000: status and perspec-
tives. Comput. Networks 42 (2003) 343–358
7. B
¨
orger, E., Gl
¨
asser, U., M
¨
uller, W.: Formal Definition of an Abstract VHDL’93 Simulator
by EA-Machines. In Delgado Kloos, C., Breuer, P.T., eds.: Formal Semantics for VHDL.
Kluwer Academic Publishers (1995) 107–139
8. Gl
¨
asser, U., Gurevich, Y., Veanes, M.: An abstract communication architecture for modeling
distributed systems. IEEE Trans. on Soft. Eng. 30 (2004) 458–472
9. Gurevich, Y.: Sequential Abstract State Machines Capture Sequential Algorithms. ACM
Transactions on Computational Logic 1 (2000) 77–111
10. Farahbod, R., Gl
¨
asser, U., Vajihollahi, M.: Specification and Validation of the Business
Process Execution Language for Web Services. In: Proc. of the 11th Int’l Workshop on
Abstract State Machines, Springer-Verlag (2004)
11. Farahbod, R.: Extending and refining an abstract operational semantics of the web services
architecture for the business process execution language. Master’s thesis, Simon Fraser Uni-
versity, Burnaby, Canada (2004)
12. Farahbod, R., Gl
¨
asser, U., Vajihollahi, M.: Abstract Operational Semantics of the Business
Process Execution Language for Web Services. Technical Report SFU-CMPT-TR-2005-04,
Simon Fraser University (2005) Revised version of SFU-CMPT-TR-2004-03, April 2004.
154

13. Martens, A.: Analysis and re-engineering of web services. To appear in 6th International
Conference on Enterprise Information Systems (ICEIS’04) (2004)
14. Schmidt, K., Stahl, C.: A petri net semantic for BPEL4WS - validation and application.
In Kindler, E., ed.: Proceedings of 11th Workshop on Algorithms and Tools for Petri Nets.
(2004)
15. Fahland, D.: Ein Ansatz einer formalen Semantik der Business Process Execution Language
for Web Services mit Abstract State Machines. Technical report, Humboldt-Universit
¨
at zu
Berlin (2004)
16. Farahbod, R., Gl
¨
asser, U., Vajihollahi, M.: Specification and Validation of the Business
Process Execution Language for Web Services. Technical Report SFU-CMPT-TR-2003-06,
Simon Fraser University (2003)
17. Nakajima, S.: Model-checking verification for reliable web service. In: OOPSLA 2002:
Workshop on Object-Oriented Web Services. (2002)
18. Koshkina, M., van Breugel, F.: Verification of Business Processes for Web Services. Tech-
nical Report CS-2003-11, York University (2003)
19. Foster, H., Uchitel, S., Magee, J., Kramer, J.: Compatibility verification for web service
choreography. In: Proceedings of the IEEE International Conference on Web Services
(ICWS’04), IEEE Computer Society (2004) 738–741
20. Narayanan, S., McIlraith, S.A.: Simulation, verification and automated composition of web
services. In: Proceedings of the eleventh international conference on World Wide Web, ACM
Press (2002) 77–88
21. Farahbod, R., Gervasi, V., Gl
¨
asser, U.: CoreASM: An extensible ASM execution engine. In:
Proc. of the 12th Int’l Workshop on Abstract State Machines. (2005)
155

156
