
Computing Simulation and Heuristic Optimization
of the Marine Diesel Drive Generating
Josko Dvornik
1
, Srðan Dvornik
1
, Eno Tireli
2
1
Faculty of Maritime Studies, University of Split,
Zrinsko frankopanska 38, 21000 Split, Croatia
2
Faculty of Maritime Studies, University of Rijeka,
Studentska 2, 51000 Rijeka, Croatia
Abstract. The aim of this paper is to show the efficiency of the System
Dynamics Computer Simulation Modeling of the dynamics behavior of Marine
Diesel-Drive Generating Set, as one of the most complex and non-linear marine
technical systems. In this paper Marine Diesel-Drive Generating Set will be
presented as a qualitative and quantitative system dynamics computer model
with a special automation aspect provided by two UNIEG-PID-regulators
(Electronics Universal PID Regulators). One of them will be used for diesel-
motor speed (frequency) regulation and the other will be used for the
synchronous electrical generator voltage regulation
.
1 Introduction
The System Dynamics Computer Simulation Modeling Methodology is one of the
most suitable and effective ways of dynamics modeling of complex non-linear,
natural, technical and organization systems. Studying the dynamics behavior of
Marine Electric Power Systems, as one of the more complex dynamic non-linear
technical systems, requires the application of only the most effective modeling
methods.
System dynamic modelling is as a matter of fact a special scientific approach i.e.
“holistic approach” to the dynamics behaviour simulation of the natural, technical and
organisational systems and therefore it includes qualitative and quantitative
simulation modelling regarding varieties of various characters. This Computer
Simulation Model of the Marine Diesel-Drive Synchronous Generating Set is very
suitable education simulator software, especially for marine students and marine
system engineers because it provides them with the means to conduct numerous
simulations for various productive scenarios.
Dvornik J., Dvornik S. and Tireli E. (2005).
Computing Simulation and Heuristic Optimization of the Marine Diesel Drive Generating.
In Proceedings of the 3rd International Workshop on Modelling, Simulation, Verification and Validation of Enterprise Information Systems, pages
102-106
DOI: 10.5220/0002571101020106
Copyright
c
SciTePress

2 Simulation model of the marine Diesel-drive generating set
The mathematical model of the Marine Diesel Motor with turbo compressor
The mathematical model or level equations of the diesel engine with turbo-
compression are:
d
dt T
T
d
dt
KT
d
dt
KT
d
dt
K
H
DH DH S S U
D
UD
2
22
1ϕϕ
ϕ
χ
χ
α
α=− − + + − −
⎛
⎝
⎜
⎞
⎠
⎟
(1)
Where:
ϕ
= relative change of angular velocity,
χ
= relative shift of the high-pressure fuel pump cogged shaft,
α
D
= relative consumer load change,
T
H
= time constant proportional to the moment of inertia,
T
DH
= time constant opposite-proportional to the moment of inertia of the engine
as the object of regulation,
K
DH
= self regulating and amplification factor,
T
S
= motor time constant of inertia,
K
S
= motor amplification factor,
T
U
= generator time constant of inertia and
K
U
= load amplification factors.
System Dynamics mental-verbal simulation model of the Marine Diesel Motor with
turbo compressor are presented at SCI 2004 (12).
3 Simulation of behavior dynamics of the marine Diesel-drive
generating
The mixed scenario has been built into this computer simulation model of DDSGS:
l. - diesel engine starts at TIME= 0 (s) and KAPA= gears batten relative shift of high-
pressure fuel pump is shifted (opened), and it is self-started in “idle-running” mode;
2. - synchro-generator starts with its self-exiting process at TIME= 20 (s);
3. - load impedance or resistance R
L
and reactance X
L
starts at TIME= 0 (s). The
R
L
=150 and X
L
==0, which means that DDSGS is in the “idle-running” mode. At
TIME= 40 (s), the R
L
= 1 and X
L
= 1 (nominal load); and
4. - stator short-circuit start at TIME = 70 (s) and R
L
= 0 and X
L
=0, which means that
DDSGS is in the “short circuit” mode.
The authors had installed two automatic short-circuit protection switches also. One of
them had taken out the u
f
= rotor exciting voltage time reaction delay, which is .4 (s)
and the other had taken out the KAPA= relative shift of the high-pressure fuel pump
cogged shaft time reaction delay, which is 2 (s).
Results:
103
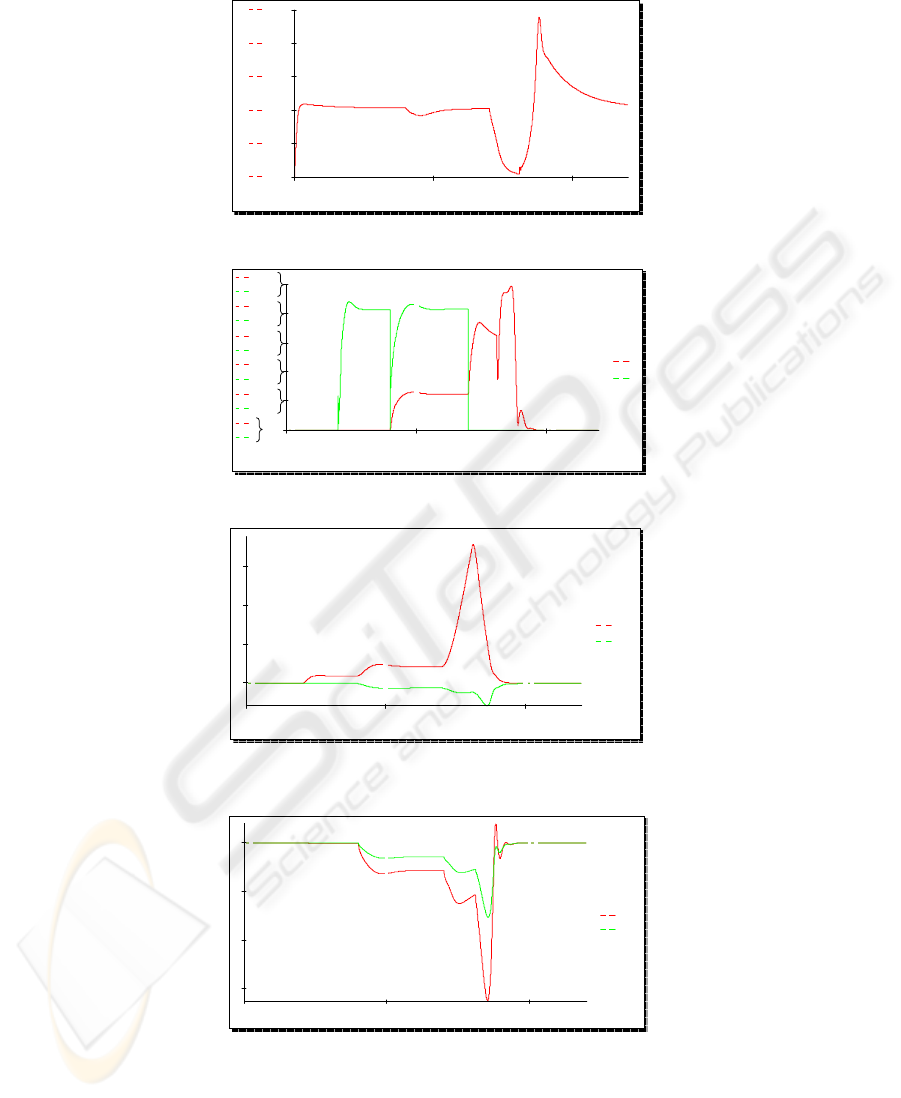
Time
FI
0 50 100
1
0,0
1
0,5
1
1,0
1
1,4
1
1,9
1
2,4
Fig. 1. FI- relative change of angular velocity,
Time
I
1
U
2
0 50 100
1
I
2
U
0,0
1
I
2
U
0,7
0,2
1
I
2
U
1,4
0,5
1
I
2
U
2,2
0,7
1
I
2
U
2,9
1,0
1
I
2
U
3,6
1,2
1 2
1
2
1
2
Fig. 2. I- stator current, U- stator voltage
Time
PS1D
1
PS1Q
2
0 50 100
0
5
10
15
1 2
1
2
1 2
Fig. 3. PS1D- damping coil flux linkage in the d-axis, PS1Q- damping coil flux linkage in the
q-axis
Time
PSIQ
1
PSAQ
2
0 50 100
-6
-4
-2
0
1 2
1
2
1 2
Fig. 4. PSIQ- stator flux linkage in the q-axis, PSAQ- stator mutual flux linkage in the q-axis
104

The dynamics behavior reaction to this mixed scenario, after the modeler had finished
the process of "heuristic optimization" by parameters of two UNIREG-PID regulators
("retry and error" computer manual method), is the following set of time curves,
where: FI= relative rate of angular velocity, U= u = stator effective voltage, I= stator
effective current. Everyone acquainted with thermodynamics and electrodynamics
machine sets recognizes the dynamically transient well-known behaviors of the
Marine Diesel-Drive Synchronous Generating Set.
4 Conclusion
The application of System Dynamics Simulation Modeling Approach of the complex
marine dynamic processes, which the authors, together with their graduate students,
carried out at the Maritime Faculty University of Split - Croatia twelve years ago,
revealed the following facts:
l. The System Dynamics Modeling Approach is a very suitable software education
tool for marine students and engineers.
2. System Dynamics Computer Simulation Models of marine systems or processes are
very effective and successfully implemented in simulation and training courses as
part of the marine education process
.
Reference
1. Munitic, A, Application Possibilities of System Dynamics Modelling", System Dynamics,
Proceedings of the SCS Western Multiconference, San Diego, California, USA (1989)
2. Milic, L., Milic, I.., Basic Automatics, in Croatian, University of Split, Maritime Faculty
Dubrovnik, p.246 (1995)
3. Nalepin, R. A. , Demeenko, O.P. Avtomatizacija sudovljih energetskih ustanovok, -
Sudostroennie, in Russian (1975)
4. Isakov, L.I. Kutljin, L.I., Kompleksnaja avtomatizacija sudovljlh dizeljnih i
gazoturbinmljih ustanovok, in Russian, Leningrad, Sudostreonnie (1984)
5. Veretenikov, L.P., Isledovanie procesov v sudovljih elektroenergetieeskih sistemah-teorija
i metodlji, in Russian, Sudostroennie (1975)
6. Suprun, G.F., Sintez sistem elektroenergetiki sudov, in Russian; Leningrad, Sudostroenie
(1972)
7. Milkovic, M., Electrical Device and Systems of Wessels, I-Part, Maritime Faculty
University of Split, Dubrovnik (1996)
8. Munitic, A., Computer Simulation with Help of System Dynamics, in Croatian, science
practical book, Editor: BIS Split, p. 297 (1989)
9. Munitic, A., Antonic, R., Dvornik, J., System dynamics simulation modelling of ship-gas
turbine generator, ICCC'03, International Carpathian Control Conference, 26-29 May,
KOŠICE, SLOVAK, 357-360 (2003)
10. Munitic, A., Antonic, R., Dvornik, J., Computing simulation and heuristic optimization of
ship anchor arrangement, ICCC'03, International Carpathian Control Conference, 26-29
May, KOŠICE, SLOVAK, 353-357 (2003)
11. Munitic, A., Milic, L., Milikovic M., System Dynamics Computer Simulation Model of
the Marine Diesel-Drive Generation Set, IMACS World Congress on Scientific
105

Computation, Modelling and Applied Matematichs, Vol.5, Wiessenschaft & Technik
Verlag, Berlin (1997)
12. Dvornik, J., Munitic, A., Orsulic, System Dynamics Simulation Model of the Marine
Diesel Drive Generation Set, SCI 2004, Orlando, USA (2004).
106
