
Selective Visual Attention in Electronic Video
Surveillance
James Mountstephens, Craig Bennett and Khurshid Ahmad
Department of Computing, University of Surrey
Abstract. In this paper we describe how a model of selective visual attention,
driven entirely by visual features might be used to attend to “unusual” events in
a complex surveillance environment. For the purposes of illustration and
elaboration we have used an implementation of an early processing model of
attention (due to Itti and Koch [1]) to process ground-truth surveillance video
data [2].
1 Introduction
Human beings have learnt to, and are genetically capable of, focussing on certain
features of their visual environment to the relative exclusion of other features.
Psychologists, neurobiologists and latterly surveillance experts and computing
professionals ask how it is that human beings can selectively attend to some features
of the environment in the light of the observation that there is no fixed
correspondence between stimuli, their properties, and attention objects [3]. There are
speculations that experience, strategy and/or individual capabilities may influence the
connection between elementary stimulus units, thereby affecting the ways they
combine to create a single complex attention object [ibid; our emphasis].
A single complex attention object is critical for electronic video surveillance, an
active area of researc
h drawing on work in computing, psychology and security. The
purpose of a surveillance system is to detect unusual events occurring in the surveilled
area based on visual input and perform some action in response. Unusual events
might include fighting or abandoning bags [4] and the required response might be to
sound an alarm [5]. By understanding the cues leading to unusual events, an expert
surveillance operative knows what to look for and what to track in a visual scene. It is
this level of performance that electronic surveillance systems attempt to emulate but
although some widely-used techniques exist [6, 7], no general machine solution is
currently available. The basic property of attention is that of selectivity and the mode
of selectivity most relevant to surveillance is that attention can “direct our gaze
towards objects of interest in our visual environment” [8, pp1]. Before higher-level
tasks such as pattern recognition, scene understanding or description [9] can take
place we must know where to look and part of our aim is to investigate the role that
this attentional guidance can play as part of a larger architecture designed for visual
understanding [10, 11].
Mountstephens J., Bennett C. and Ahmad K. (2005).
Selective Visual Attention in Electronic Video Surveillance.
In Proceedings of the 5th International Workshop on Pattern Recognition in Information Systems, pages 198-203
Copyright
c
SciTePress

In this paper we describe how a model of visual attention, driven entirely by visual
features might be used to attend to “unusual” events in a complex environment. We
have used an early processing model of visual attention which has been implemented
by Itti and Koch [1, 12]. The images used in our experiment were created by the
CAVIAR project which was focused, in part, on public space surveillance task, and
‘are ground truth labeled frame-by-frame with bounding boxes and also a semantic
description of the activity in each frame’ [2, pp.1].
2 A Method for Computing Salience and Conspicuity
There are several computational models of visual attention [eg. 13, 14] and among
them there is a distinction between bottom-up and top-down processing. Bottom-up
processing is reactive, based entirely on features of visual input whereas top-down
processing allows prior knowledge to bias response to input in order to intentionally
promote or suppress certain features of it. We have selected an implemented and
freely available model of visual attention due to Itti and Koch [15] which in its basic
form is purely bottom-up (though see [16] where goal-orientated attentional guidance
is explored). This model is based on earlier work by Koch and Ullman [17] which
itself drew heavily on the feature integration model of attention by Treisman and
Gelade [18]. The input to the model is a video sequence of n-image frames. There are
two outputs of the model which are important to us, namely that its output is a single
location in the image frame (a gaze fixation) and that this location will move during a
frame sequence due to the mechanism of inhibition of return. These outputs are the
product of a number of intermediate processes in which image features are both
extracted and combined to yield a location that is currently the focus of attention, or is
salient in the parlance of Itti and Koch.
A saliency map is calculated to encode the conspicuity of every point in the input
image and consists of a weighted sum of early visual features calculated in parallel at
every location. The most common features, and those used in our experiments, are
colour, intensity, orientation (0, 45, 90, 135 degrees), movement (left, right, up,
down) and flicker. Each raw feature map is calculated at multiple spatial scales (in a
Gaussian pyramid) and differencing across these scales is used to calculate a centre-
surround response at every location so that local contrast rather than the absolute
value of the feature becomes important. A process of normalisation and combination
across scales yields a single conspicuity map for each feature and the saliency map is
constructed as a weighted sum of these conspicuity maps. The saliency map is
realised as an array of leaky integrate-and-fire neurons and a winner-takes-all process
of competition is performed to locate the most salient point in the map. This winning
point is the output of the model and is the suggested location for the gaze. However,
given a static image and constant model parameters, the winning location will always
be the same so finally a mechanism for inhibition of return operates to enable the
image to be scanned in order of decreasing salience. By giving the saliency map a
large negative weighting in the region centred on the current fixation, the fixation
point must move to another location at the next time step. Strategies for combining
conspicuity maps to build a saliency map are discussed in [19]. Figure 1 comprises a
pseudo-code for calculating the current fixation location.
199
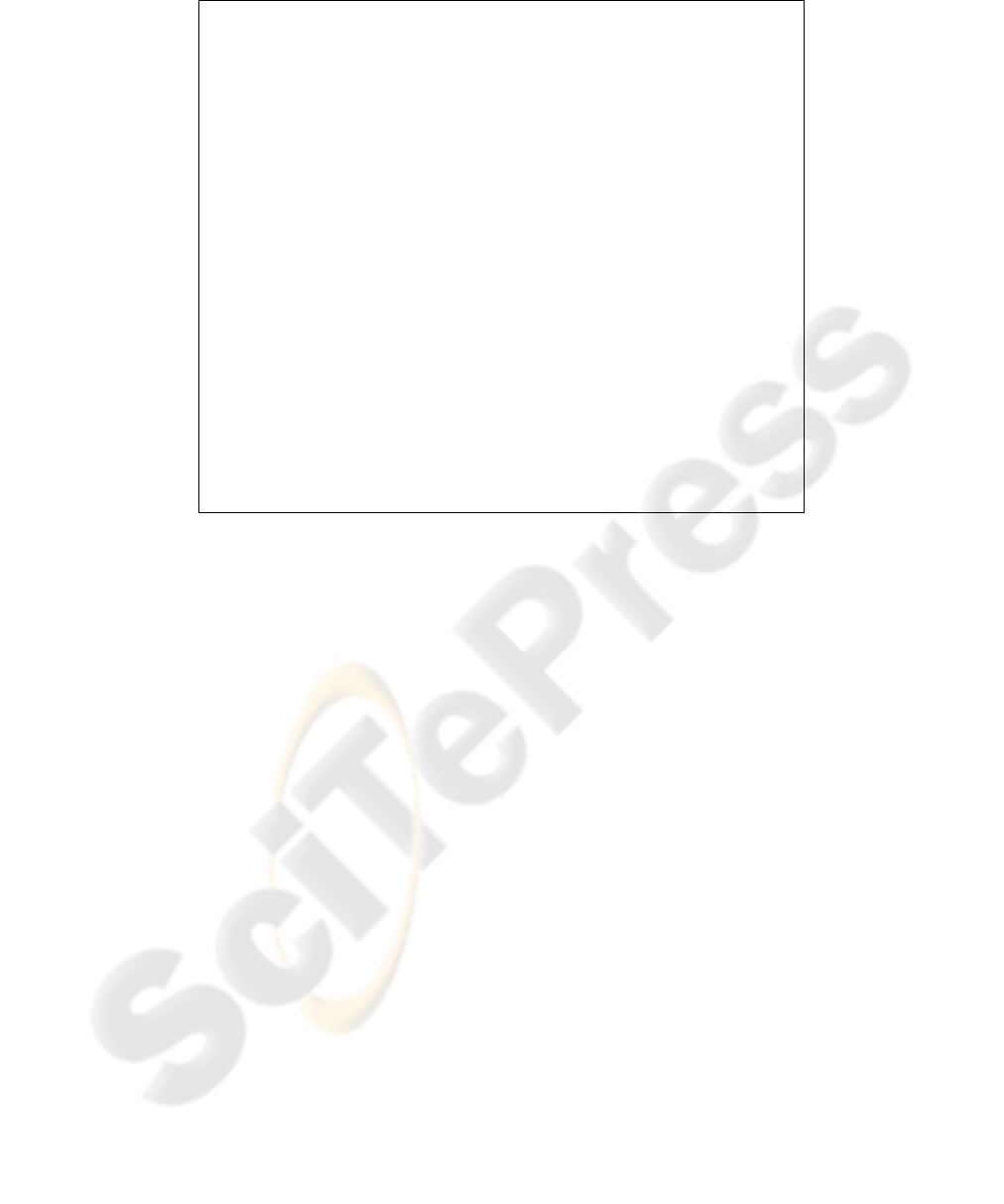
<CALCULATE CURRENT FIXATION LOCATION>
Æ[video sequence of n image frames]
For every frame in the video sequence(0..n)
For all features to be extracted (intensity, colour, orientation, flicker, motionL/R/U/D)
<construct 8-spatial scale Gaussian pyramid of feature>
For all spatial scales(i..8)
<extract raw image feature at spatial scale i>
Æ[Raw image features]
end for
Æ [Gaussian Pyramids of Raw image features]
<combine raw features across scales in pyramid and normalise>
Æ [Normalised feature maps]
For all feature maps (1..2)
<combine normalised feature maps across scales and normalise>
Æ [Normalised conspicuity maps]
end for
end for
<weighted summation of conspicuity maps>
Æ [Saliency map]
<winner-takes-all search of saliency map>
Æ [Current most salient location]
<inhibition of return>
Æ [Inhibited saliency map]
end for
end process
Key: Control Æ [Data] <process name>
Fig. 1. Pseudocode description of Itti and Koch attentional model. Computations of static
image features of colour, intensity and orientation features can be found in [20] and that of the
dynamic features of flicker and motion are in [21].
Given that the output of the preceding model is a location in an image, we asked
whether this calculated location would correspond to locations worth attending to in a
surveillance situation. As suggested earlier, this gaze location guidance is likely to be
a prerequisite for higher-level visual processing. In order to perform some elementary
experiments addressing this question we employed two main practical components: a
software implementation of the Itti and Koch model (iNVT - the iLab Neuromorphic
Vision Toolkit [12]) and a publicly-available surveillance video dataset (CAVIAR
dataset [22]). The iNVT accepts images or appropriately named image sequences as
input and can produce output images showing the trajectory of fixation points. The
CAVIAR dataset comprises eighty video clips (over 90,000 frames) containing six
event-types: walking, browsing, collapsing, leaving object, meeting, and fighting [2]
and each clip is accompanied by a ‘semantic’ description of objects of interest in the
scene. In this case, objects of interest are moving people or discarded objects and per-
frame information about these people, their activities and bounding box information
(including centre coordinates, width and height) has been hand annotated for all clips.
Of the six event-types in the CAVIAR dataset, the category of “leaving object” was
selected for this experiment because it typically contains both usual and unusual
events – the usual event of walking precedes the unusual event of leaving an object.
In our experiment we run the five “leaving object” videos, per-frame, through the
iNVT to produce a gaze fixation point and use the bounding box information in the
ground-truth description accompanying those videos to decide whether the fixation
200
point is on an object of interest. For every frame, if the fixation point is within the
bounding box of a named object (as defined in the CAVIAR ground-truth description)
we construe this as a hit. Otherwise it is a miss. From this we can calculate both the
total number of hits (on any person or object in the scene) and the total hits on the
object associated with the unusual event (the discarded object). With this hit data and
knowledge of the total number of frames in the video we can calculate some
elementary performance ratios.
3 Experiment: Attending to Discarded Objects
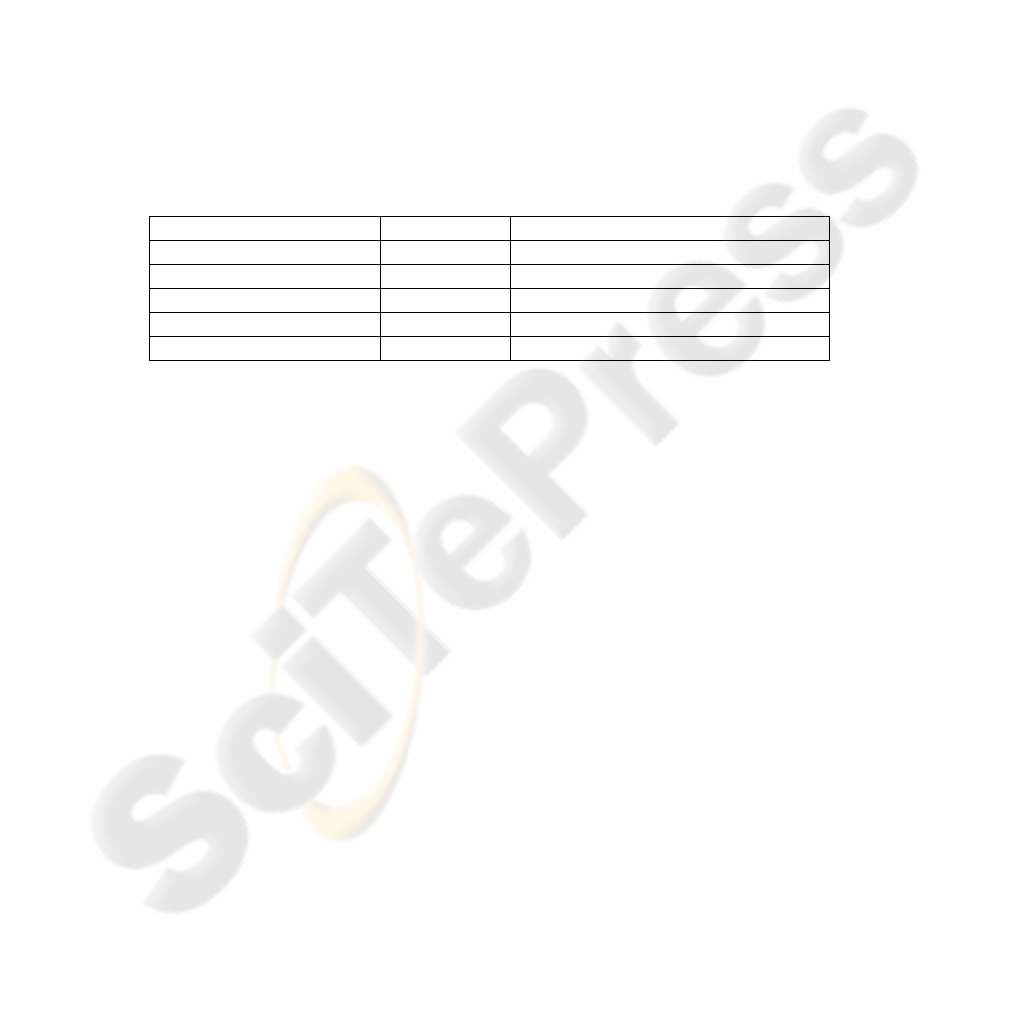
Using the method described above, five CAVIAR videos of people walking then
discarding objects were processed by the iNVT. Table 1 shows the percentage of
fixation point hits for all objects in the scene, listed in descending order of hit rate for
the five videos processed, and whether the event of discarding an object was hit.
Table 1: Total object hit rate and event of discarding object detection
Video Hit % Event of Discarding Object Hit?
LeftBox 40 No
LeftBag_PickedUp 38 Yes
LeftBag 37 No
LeftBag_AtChair 33 No
LeftBag_BehindChair 30 No
Considering that no explicit knowledge is embodied in the attentional model,
column 2 suggests an encouraging degree of correspondence between the features
driving the model and events in the scene. Of these hits it makes sense to ask how
many of those locations were important to the task, namely how many correspond to
unusual events. Column 3 shows whether the event of leaving an object was hit by
the fixation point and here, the results are less encouraging - only one event of
discarding an object was hit. A visual examination of model output by us
demonstrated that salience is affected by a) what has happened in the last time-step,
through inhibition of return, and b) what is going on elsewhere in the scene. For
example, in some cases the gaze was close to the individual who would soon discard
the object but could not move to that location at the point of jettison since it had been
inhibited in the saliency map. Also, the usual events of innocent people walking could
divert attention away. In terms of visual features alone, the act of discarding an object
was often not salient enough to attract the focus of attention. An examination of other
activities in the CAVIAR dataset has produced more encouraging results and will be
reported in due course.
4 Conclusions and Future Work
Itti and Koch’s model produces an annotation of an image by marking changes in the
focus of attention by encircling objects ‘behaving’ unusually in the image and by
201

marking the last focal point. The model identifies some of the focal objects correctly
with the limited information it has. Our future work will include modulating the Itti
and Koch model’s mechanism for inhibition of return to improve event tracking
performance and to investigate how these salient events can be learned automatically.
We are exploring how the annotation produced by the model can be used as a part
of an overall annotation framework where advantage is taken of other modalities used
in describing objects in the image. Elsewhere, we have used collateral linguistic
description of still images for the purpose of indexing and retrieving scene of crime
images [23]. We have begun to obtain a collateral linguistic description of a small
subset of the CAVIAR video clips to obtain a more meaning-oriented information
about objects in the videos; surveillance experts are being interviewed for this
purpose. The longer-term aim is to combine visual attention analysis with information
obtained from other modalities used to describe the same environment, specifically a
linguistic description.
This research is currently at an early stage and forms part of the EPSRC
(Engineering and Physical Sciences Research Council) funded project REVEAL
(Recovering Evidence from Video). The strategic objective of the project is to
promote those key technologies which will enable automated extraction of evidence
from CCTV archives. In addition to the development of methods for capturing the
conceptual structure underpinning the work of surveillance experts, the project aims
to develop methods of integrating the linguistic structure (the Visual Evidence
Thesaurus) and the visual-content (the Surveillance Meta-Data Model) through co-
learning to enable the automatic annotation of video data streams, and facilitate the
retrieval of video evidence from high-level queries. [24].
Acknowledgements
This work has been supported by the UK Engineering and Physical Sciences
Council’s grant REVEAL, (GR/S98443/01). The project is being conducted in close
collaboration with Kingston University and Sira Ltd, and supported by Police
Information Technology Organisation (PITO) and Police Scientific Development
Branch (PSDB). James Mountstephens is funded through an EPSRC Studentship
and Craig Bennett funded by a University of Surrey Studentship.
References
1. Itti, L. and Koch, C. (2001), “Computational Modelling of Visual Attention”, Nature
Reviews Neuroscience, Vol. 2(3), pp 194 – 203.
2. Fisher, R. (2004). “The PETS04 Surveillance Ground-Truth Data Sets”, Proc. Sixth IEEE
Int. Work. on Performance Evaluation of Tracking and Surveillance, pp 1-5.
3. Eysenck, M. W. (Ed.) (1990), The Blackwell Dictionary of Cognitive Psychology. Oxford :
Blackwell Reference, 1990.
4. Haritaoglu, I., Harwood, D. and Davis, L. S. (2000), “W4: Real-Time Surveillance of
People and their Activities”, IEEE Transactions on Pattern Analysis and Machine
Intelligence, Vol. 22(8), pp 809 – 830.
202

5. Foresti, G. L., Marcenaro, L., and Regazzoni, C. S. (2002), “Automatic Detection and
Indexing of Video-Event Shots for Surveillance Applications”, IEEE Transactions on
Multimedia, Vol. 4(4), pp 459 – 471.
6. Aggarwal, J., Cai, Q. (1997), “
Human Motion Analysis: a Review”. Proc. IEEE Nonrigid
and Articulated Motion Workshop, pp 90 – 102.
7. Gavrila, D. (1999), “The Visual Analysis of Human Movement: a Survey”, Vision and
Image Understanding, Vol. 73(1), pp 82 – 98.
8. Itti, L. (2003), “Visual Attention”, In M. A Arbib,. (Ed), The Handbook of Brain Theory
and Neural Networks, 2nd Ed. MIT Press, pp. 1196-1201.
9. Rittscher, J., Blake, A., Hoogs, A. and Stein, G., (2003), “Mathematical Modelling of
Animate and Intentional Motion”, Philosophical Transactions: Biological Sciences. Vol.
358(1431), pp 475 -490
10. Marr, D. (1980), “Visual Information Processing: the Structure and Creation of Visual
Representations”. Philosophical Transactions of the Royal Society of London B, 290: pp.
199 – 218.
11. Ullman, S. (1984), “Visual Routines”, Cognition, Vol. 18, pp 97 – 159.
12.
http://ilab.usc.edu/bu. Last accessed 17-03-05.
13. Wolfe, J. (1998), “Visual Search: a Review”. Attention, H. Pashler (Ed.), London UK:
University College Press.
14. Tsotsos, J. K. , Culhane, S.M., Wai, W. Y. K., Lai, Y. H., Davis, N. & Nuflo, F. (1995),
“Modelling Visual-Attention via Selective Tuning”, Artificial Intelligence, Vol. 78 (1-2),
pp 507-45.
15. Itti, L., Koch, C., Niebur, E. (1998), “A Model of Saliency-Based Visual Attention for
Rapid Scene Analysis”, IEEE Transactions on Pattern Analysis and Machine Intelligence,
Vol. 20(11), pp 1254-1259.
16. Navalpakkam, V., and Itti, L. (2002), “A Goal Oriented Attention Guidance Model”,
Lecture Notes in Computer Science, Vol. 2525, pp. 453-461.
17. Koch, C, Ullman, S. (1985), “Shifts in Selective Visual Attention: Towards the Underlying
Neural Circuitry”. Hum Neurobiol, Vol 4(4), pp 219 – 227.
18. Treisman, A. M., Gelade, G. (1980), “A Feature-Integration Theory of Attention”, Cognit
Psychol, Vol. 12(1), 97-136.
19. Itti, L., Koch, C. (2001), “Feature Combination Strategies for Saliency-Based Visual
Attention Systems”, Journal of Electronic Imaging, Vol. 10(1), pp. 161-169.
20. Itti, L. (2000), “Models of Bottom-Up and Top-Down Visual Attention”, PhD thesis,
California Institute of Technology.
21. Itti, L. Dhavale, N. Pighin, F. (2003), “Realistic Avatar Eye and Head Animation Using a
Neurobiological Model of Visual Attention”, Proc. SPIE 48th Annual International
Symposium on Optical Science and Technology, pp. 64-78.
22. http://www.dai.ed.ac.uk/homes/rbf/CAVIAR/. Last accessed 17-03-05.
23. Ahmad, K., Tariq, M., Vrusias, B. and Handy C. (2003), “Corpus-Based Thesaurus
Construction for Image Retrieval in Specialist Domains”. In (Ed). Fabrizio Sebastiani.
Proc 25th European Conf on Inf. Retrieval Research (ECIR-03, Pisa, Italy) LNCS-2633.
Heidelberg: Springer Verlag. pp 502-510.
24. www.computing.surrey.ac.uk/ai/reveal/. Last accessed 17-03-05.
203
