
GENERIC FAULT-TOLERANT LAYER SUPPORTING
PUBLISH/SUBSCRIBE MESSAGING
IN MOBILE AGENT SYSTEMS
Milovan Tosic, Arkady Zaslavsky
School of Computer Science and Software Engineering, Monash University, 900 Dandenong Road
Caulfield East, Victoria 3145, Australia
Keywords: Reliability, Fault-tolerance, Agents, Multi-agent Systems, Publish/Subscribe Messaging, Web-services
Abstract: With the introduction of clustered messaging brokers and the fault-toleran
t Mobile Connector, we can
guarantee the exactly-once consumption of messages by agents. The context-aware messaging allowed us to
decrease the messaging overhead which has to be present in any fault-tolerant solution. This paper proposes
a complete fault-tolerant layer for multi-agent systems (EFTL) that does not restrict agent autonomy and
mobility in any way. An application can choose if it wants EFTL support and that decision is based on
support costs. A persistent publish/subscribe messaging model allows the creation of an external platform-
independent fault-tolerant layer. In order to support the multi-agent platforms of different vendors, a large
part of the application logic is moved from those platforms to an application server. We present the EFTL
s
ystem architecture, the algorithm of exactly-once message consumption and the system’s performance
analysis.
1 INTRODUCTION
The use of web-services in many domains of
distributed computing has proven its effectiveness.
However, the research community has not paid a lot
of attention to the application of web-services in
domain-independent fault-tolerant support systems.
Our External Fault-Tolerant Layer (EFTL)
introduces a new dimension in this research area –
moving the components of the fault-tolerant system
out of the multi-agent platforms using standard
tools, web-services and messaging brokers.
Moreover, an application or an agent can choose if it
wants EFTL support and that decision is based on
support costs.
The most important factors which can affect
reliab
ility of multi-agent systems are related to the
reliability levels of their components. Multi-agent
systems are comprised of different entities where the
most important ones are the agents and agent hosts.
In regard to the basic systems theory, the
performance of the whole system and its outputs
depends on the actions and performance of its
entities. That means that the performance of the
complete multi-agent system depends on the
performance of its agents and hosts. On the other
hand, not all the entities within a system have the
same level of importance, so the failure of some
entities might not cause the failure of the whole
system. That is why fault-tolerant approaches can
ignore some failures in order to lower the cost of a
fault-tolerant solution.
Another category that can cause a failure of the
sy
stem is communication. Knowing that the
achievement of a goal usually depends on
cooperation between the agents, we can conclude
that any fault of a communication subsystem can
produce the difference between the real and
expected outcomes of a system. Agent migration
between the hosts can be viewed as a special type of
communication because many agent platforms use
the same mechanisms for message and agent
transfer. If an agent is lost during transmission from
one host to another, then it is not an agent failure but
a migration failure.
The persistent publish/subscribe messaging
m
odel allows the creation of an external platform-
independent fault-tolerant support system. The most
important part of any distributed fault-tolerant
support system is its messaging subsystem. With the
111
Tosic M. and Zaslavsky A. (2005).
GENERIC FAULT-TOLERANT LAYER SUPPORTING PUBLISH/SUBSCRIBE MESSAGING IN MOBILE AGENT SYSTEMS.
In Proceedings of the Seventh International Conference on Enterprise Information Systems, pages 111-118
DOI: 10.5220/0002544101110118
Copyright
c
SciTePress

introduction of clustered messaging brokers and the
fault-tolerant Mobile Connector, we can guarantee
the exactly-once consumption of messages by
agents. The Mobile Connector is a lightweight
platform-independent component which does not
restrict agent autonomy and mobility.
This paper is organized as follows: firstly, we
shall present related work from the area of multi-
agent system reliability. Then, we shall explain the
reliability model which has been used in our
research and describe the architecture of the External
Fault-Tolerant Layer (EFTL) with focus on the
Mobile Connector component. After that, we shall
present a few scenarios in EFTL functioning and
explain what needs to be done to develop an
application that will be supported by EFTL. The last
sections of this paper will present performance
analysis of EFTL, the conclusions and motivations
for future work.
2 RELATED WORK
A group of authors proposed checkpointing as a
good procedure which saves agent states to a
persistent storage medium at certain time intervals.
Later, if an agent fails, its state can be reconstructed
from the latest checkpoint (Dalmeijer et al, 1998).
This approach depends on the reliability of the host
because we have the so-called blocking problem
when the host fails. The agents which have been
saved at a particular host can be recovered only after
the recovery of that host (Mohindra et al, 2000). The
second approach that tries to ensure an agent’s
reliability is replication. In this approach, there are
groups of agents which exist as replicas of one
agent, and can be chosen to act as the main agent in
case of its failure. The number of agents is increased
and they have to cooperate so the complexity of the
system is also increased. In order to preserve the
same view to the environment from all the members
of the replica group, (Fedoruk, Deters, 2002) have
proposed the concept of a group proxy, which is an
agent acting as proxy through which all the
interactions between the group and the environment
have to pass. When the proxy agent approach is
broadened with the primary agent concept, in
(Taesoon et al, 2002) and (Zhigang, Binxing, 2000),
then the primary agent is the only one which does all
the computations until its failure. Then all the slaves
vote in another primary agent from their group.
Therefore, any slave agent can become a primary.
In order to watch the execution of an agent from
an external entity, (Eustace et al, 1994), (Patel, Garg,
2004) and (Lyu, Wong, 2004) have proposed the
usage of supervisor and executor agents. The
supervisor agents watch the execution of the
problem-solving agents and detect all the conditions
which can lead to, or are, the failures, and react upon
detected conditions. Hosts can also be used as the
components of a fault-tolerant system (Dake, 2002).
Basic services which are provided by the hosts can
be extended by certain services which help the
agents achieve a desirable level of reliability.
Depending on the implementation of the fault-
tolerant system, it cannot cope with all kinds of
failures. That is why some systems do not even try
to recover from certain types of failures. In order to
determine the feasibility of the recovery, (Grantner
et al, 1997) proposed the usage of fuzzy logic.
Moving on to the recovery of an agent host, if
the state of the host has not been saved to a
persistent storage medium, we can simply restart the
host. Then, if a host is very important for the
functioning of the whole agent platform, we can
replicate it (Bellifemine et al, 2003). If our agents
used the transaction-based approach which relied on
the services provided by the host and not by an
underlying application server or a database, then the
host is the one which has to undo all the
uncommitted actions after its restart (Patel, Garg,
2004).
In order to deliver a message to an agent, we
have to track the agent’s location to determine where
to forward the message. The authors have proposed
different solutions, such as the registration of the
agent locations at some central entity (Moreau,
2002) or the usage of the forwarding pointers
principle (Zhou et al, 2003). Then, when we know
the exact location of the agent, we have to deliver
the message. Two main delivery principles have
been specified in (Cao et al, 2002). In the “push”
principle, we have to interfere with an agent’s
autonomy and to constrain its mobility until we
deliver the messages to it. In the “pull” principle, the
agent is the one which decides when it wants to
receive messages, and which messages it wants to
receive. (Cao et al, 2004) have proposed the mailbox
as a separate entity that is also mobile and moves to
be at the same host as its agent or somewhere close
to that host.
The benefits of the publish/subscribe messaging
model in mobile computing have been presented in
(Padovitz et al, 2003). Their approach specifically
concentrates on context-aware messaging, where an
agent can subscribe to receive only the messages
which satisfy its subscription filter. This solution
leads us to a highly effective notification mechanism
for the mobile agents.
Another communication problem, the
inaccessibility in the case of, for example, network
fragmentation can be solved using the doubler
agents, presented in (Pechoucek et al, 2003).
ICEIS 2005 - SOFTWARE AGENTS AND INTERNET COMPUTING
112
Multicasting is the delivery of the same message to
multiple receivers, and is often described by the “all
or none” principle. Researchers usually used the
two-phase commit protocol to solve this problem, as
in (Macedo, Silva, 2002).
3 RELIABILITY MODEL
The reliability of multi-agent systems has to be
measured differently from the reliability of other
conventional distributed systems. Since almost all
multi-agent systems share characteristics such as
network fragmentation, component autonomy and
mobility, then standard factors of reliability, like
system availability, cannot be applied to them.
Therefore, we have to find another reliability model
able to describe the events which can cause multi-
agent system failures and allow us to evaluate our
research achievements.
As described in (Luy, Wong, 2004), reliability in
multi-agent systems can be evaluated by measuring
the reliability of each individual agent on a more
general level. From the viewpoint of the whole
system, each agent can either successfully complete
its tasks or fail to do so. Therefore, the reliability of
the whole system depends on the percentage of
agents which managed to achieve their goals.
The same authors proposed that the agent tasks
should be defined as scheduled round-trips in a
network of agent hosts.
In order to evaluate reliability, we can assume
that the agents and agent hosts are prone to different
types of failures. The agents can die unexpectedly or
become non-responsive. A host can die and cause
the failures of all the agents which resided on it at
the moment of its death. Only the agent which
managed to arrive at the final host and which has a
state consistent with the states of all the other
successful agents can be considered a successful
finisher.
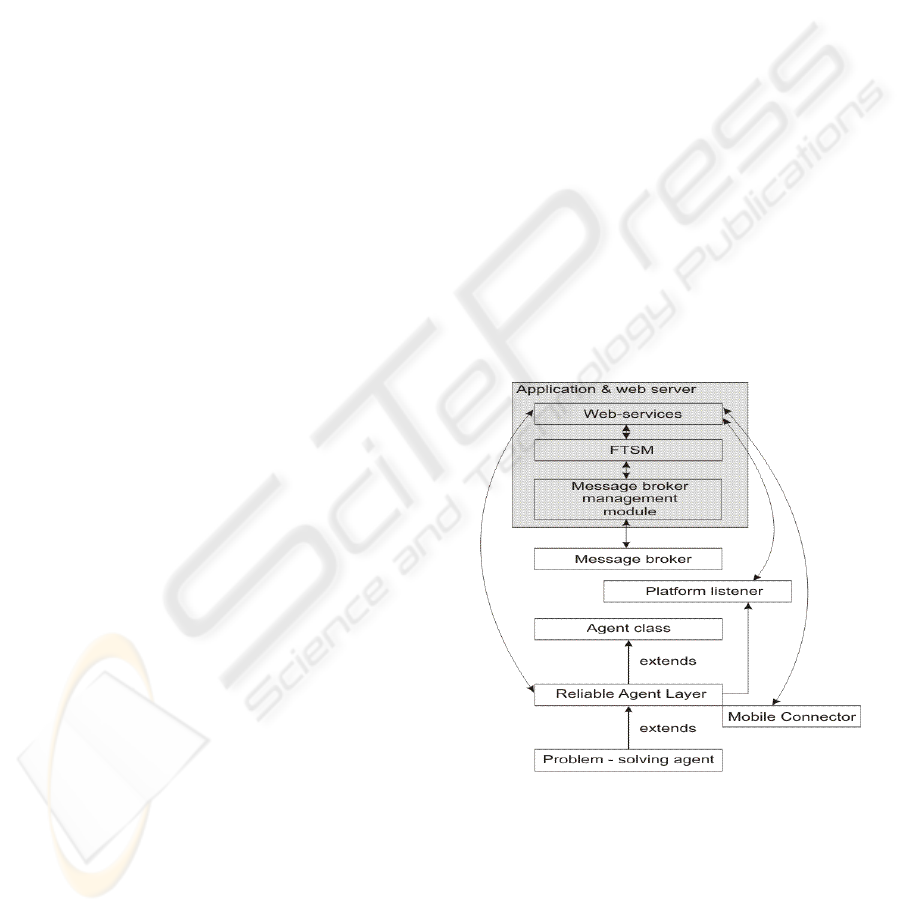
4 DESIGN OF EFTL
EFTL (External Fault-Tolerant Layer) is an
application-independent fault-tolerant layer that
provides multi-agent systems with extra reliability
features. The system diagram is presented in Figure
1. In order to support multi-agent platforms from
different vendors, a large part of application logic is
moved from those platforms to the application, web
and messaging servers. The only platform-dependent
components are the Reliable Agent Layer and the
Platform Listener. They support only the basic
operations which EFTL has to perform on an agent
or agent platform. Those operations include the
control of an agent’s life cycle and listening to the
platform-wide events which are important from a
reliability perspective.
The Platform Listener is not deployed at any
agent host prior to EFTL execution time. The usage
of a web-server allowed us to decouple the agent
platform and the Platform Listener. It is installed by
the Reliable Agent Layer only when EFTL decides
that the listener functionality is needed. The Reliable
Agent Layer downloads a Platform Listener class
from a web-server and deploys it at an agent host.
The costs of EFTL support can be expressed in
monetary terms or system resources that have to be
used for the functioning of EFTL. An application or
an agent can decide whether those costs are
acceptable in line with the additional reliability that
EFTL provides.
Our fault-tolerant solution employs a persistent
publish/subscribe messaging model. It was the
premise that allowed us to develop an almost
completely external and platform-independent
system. With the introduction of clustered
messaging brokers and the fault-tolerant Mobile
Connector, we can guarantee the exactly-once
consumption of messages by the agents.
Figure 1: EFTL Architecture
4.1 The Mobile Connector
After an agent registers with EFTL, it obtains the
credentials needed to make subscriptions or to
publish a message to a message topic. The Mobile
Connector is a facility that allows agents to
communicate independently to the changes in their
GENERIC FAULT-TOLERANT LAYER SUPPORTING PUBLISH/SUBSCRIBE MESSAGING
113

life cycles. It defines message selectors which can be
used to allow context-aware messaging within a
multi-agent platform.
The Mobile Connector is used to subscribe
and/or publish to a message topic. If a message-
receiving acknowledgement does not reach the
message broker, due to link problems, then the
message is resent. The agent would receive another
copy of the same message. To enforce the exactly-
once property, every message published in EFTL is
uniquely numbered. This allows the Mobile
Connector to discard messages which have already
been consumed. This process can be represented by
the following pseudo-code:
while(subscribed to a topic)
begin
wait for next message;
receive message;
read unique MsgID;
if(MsgID <= ConsumedMsgID)
begin
discard the message;
end
else
begin
consume the message;
ConsumedMsgID = MsgID;
end
end-while;
The actions of the Mobile Connector depend
upon the changes in agent lifecycle and that is why
the Reliable Agent Layer informs its Mobile
Connector about each relevant change. Then, the
Mobile Connector is able to perform all the
operations that precede or follow events which can
cause temporary disconnections from a message
broker. At the moment of its creation, the Mobile
Connector registers itself with the message broker,
and creates both a publisher and a durable
subscriber. Once it establishes the connection to the
broker, this component makes sure that the link is
reliable and if it detects a disconnection, it
reconnects to the broker.
To solve the problem of message loss during
periods of disconnection from the message broker,
the Mobile Connector only disconnects from the
message broker prior to the next migration step, but
its primary subscription stays valid at the broker so
that all the missed messages are forwarded to the
agent as soon as it reconnects to the broker. This
way, the Mobile Connector does not affect an
agent’s autonomy but guarantees message delivery.
4.2 The EFTL Web-services
Reliable agents use web-services for cost evaluation,
contract signing, initial registrations with EFTL,
deregistration from EFTL and redundant ways of
communication if the standard publish/subscribe
model fails. In order to register an agent and provide
it with fault-tolerant support, web-services need
information about the agent platform and that
particular agent.
Web-services act as a gateway from the Reliable
Agent Layer to the other EFTL components - the
Fault-Tolerant System Manager and the Messaging
Broker Management Module.
A multi-agent system can be comprised of
reliable agents, which are supported by EFTL, and
non-reliable agents. However, cooperation in the
system is not constrained by the category to which
the agents belong. EFTL controls only the agents
with the Reliable Agent Layer, but listens to
communication between all the agents within a
platform. It can recover only reliable agents. The
recovery of an agent might require the use of
information about communication of that agent with
all the other agents, irrespective of whether those
agents were reliable or not.
4.3 Negotiable EFTL Support
Based on application domain, system goals and
specific performance requests, developers can
identify the agents which are critical to their
mission. According to that information, the agents
which have to be supported by EFTL and therefore
provided with fault-tolerant support, need to have
valid contracts with EFTL. A multi-agent system
can be classified in one of three groups in regard to
its demand for reliability: it can be either a high,
medium or low demand system. If a system has a
high demand for reliability, it probably has a mission
critical application which wants EFTL support by all
means and at any cost. Therefore, it will sign a
contract with EFTL without any negotiation. If it has
a medium demand for reliability, it needs to
negotiate the costs with EFTL before it makes a
decision about its support. If a system has a low
demand for reliability, it will not use EFTL support.
The negotiation of costs by a system which has
medium demand for reliability can be done by each
agent separately or by an external application.
If an agent negotiates the costs with EFTL, it has
to read an activation profile which defines the costs
the agent is ready to accept. Those costs are sent to
the Contractor web-service which compares them to
the real costs dependant on the platform type and
agent size. If the accepted costs are lower or equal to
ICEIS 2005 - SOFTWARE AGENTS AND INTERNET COMPUTING
114

the real costs, the agent signs a contract for EFTL
support.
If an external application negotiates the costs
with EFTL, it has to forward information about the
agent platform and agents which are going to be
used, to the Contractor web-service. In order to
facilitate the negotiation process, the application can
use the EFTL Negotiator class which is distributed
as part of the EFTL system. The Contractor web-
service returns the real costs so that the application
can choose whether or not it wants EFTL support. If
it decides to sign a contract with EFTL, that contract
holds information about all the agents that are going
to be supported. Therefore, the application has to
forward the contract details to every agent in order
to allow them to register with EFTL.
4.4 Recovery Procedures
The checkpointing procedures used in EFTL do not
affect agent mobility. When an agent decides to
move quickly to another host, its Reliable Agent
Layer might not have time to save a local
checkpoint. If the agent fails, EFTL will have to try
to find an earlier checkpoint in order to recover that
agent. This kind of checkpointing is developed in
order to preserve agent autonomy and not restrict
mobility.
When the Platform Listener detects an event
which might impair the functioning of the overall
system, it notifies FTSM (Fault-Tolerant System
Manager). Following the detection of the agent’s
death, FTSM, which listens to the topic that the
Platform Listener published the notification to,
decides to recover the agent. It sends the recovery
command to another reliable agent closest to the
place where the recovery is going to take place. That
reliable agent performs the whole recovery
procedure. The dead agent is recovered from its last
checkpoint if its host is alive and functioning. If the
host is not alive, in order to prevent the problem of
blocking while we wait for the host to recover,
EFTL, using the web service which has access to the
hosts registry, finds out which other hosts provide
the same services as the failed host. Then, the agent
is sent to the host which is most similar to the failed
one. When the agent is recovered, EFTL resends all
the messages which have been produced by other
agents from the moment of its checkpoint save until
the moment of its death. This way the state of the
agent is driven to the point in which it is consistent
with the states of all the other agents present in the
system, regardless of whether they are reliable or
not.
When EFTL detects that an agent’s life cycle has
not changed during a longer period of time, it may
decide to ping the agent using the publish/subscribe
messaging subsystem. If the agent does not respond
to the pings, EFTL concludes that it is non-
responsive, removes it from the multi-agent system
and recovers it from the latest checkpoint.
EFTL checks whether the recovery process is
finished in a timely manner. An agent taking
responsibility for the recovery of another agent
might fail during that recovery process. Then EFTL
tries to find another agent capable of doing that
work. EFTL ceases the recovery if it cannot be
finished within a predefined period of time.
Moreover, EFTL will not be able to recover an agent
which did not save any of its checkpoints.
EFTL uses the web service to access hosts
registry in case of resource unavailability. When an
agent is blocked due to inaccessible resources, EFTL
sends it to a host which has exactly the same or
similar resources.
In the case where network partitioning is
detected, EFTL watches the agent actions and
prevents them from running into situations which
can cause their failures. When an agent (e.g. Agent
A) is unable to move to a destination host, EFTL
searches the system to find another agent (e.g. Agent
B) of the same type which can move to the
destination host. If such an agent is found, EFTL
clones Agent B and sends it to the destination host.
Then, using the publish/subscribe system and Java
reflection mechanism, EFTL updates Agent B’s state
with the state of Agent A which is removed from the
system.
5 APPLICATION DEVELOPMENT
WITH EFTL
The external part of EFTL has to be deployed to the
application and web servers. It is distributed in the
form of Java archive files, so the process of
deployment is simple. Those files have to be copied
to the deployment folders of the application and web
servers. The next step is initialization of the
messaging subsystem. If the messaging subsystem is
a part of the application server, it is usually started at
the same time as the server instance. If the
messaging subsystem is a separate application, it has
to be started and configured for proper use by EFTL.
Configuration of each messaging system depends on
what levels of reliability, fail-over and scalability are
required within the messaging subsystem.
The Reliable Agent Layer class has to be visible
to a problem-solving agent class. The developer
does not have to implement any new methods
related to the special fault-tolerant features. If the
GENERIC FAULT-TOLERANT LAYER SUPPORTING PUBLISH/SUBSCRIBE MESSAGING
115
Reliable Agent Layer is implemented as a separate
class, the public methods of the basic Agent class
are defined as final. Then the problem-solving agent
cannot implement those methods in its code. It can
only implement the methods of the Reliable Agent
Layer class which have similar names. For example,
if the Agent’s method name was beforeMove, the
Reliable Agent Layer’s name would be
beforeReliableMove. If the agent platform’s license
allows changing of its source code, the Reliable
Agent Layer functionality can be embedded in the
basic Agent class. Then, the developers could use
the same method names as in the Agent class.
Special property files have to be present at the
host in which the reliable agents are being
initialized. These configurable files are read by the
Reliable Agent Layer. They provide the layer with
the information on how to connect to the rest of
EFTL. The developer or the system administrator
has to edit the connection values in these files after
the application, web and messaging servers have
been configured.
6 PERFORMANCE ANALYSIS
Performance analysis of EFTL had to include two
distinct categories which are applicable to any fault-
tolerant system: its reliability level and messaging
overhead. Context-awareness of the EFTL
messaging subsystem was designed with one
objective in mind - to reduce messaging overhead
between components of the fault-tolerant system.
Tests were conducted in the JADE environment,
using a fixed number of hosts distributed on
different computers. Types of failures simulated in
these tests were host and agent deaths. The host
death rate was constant - one host failure per ten
seconds. Every failed host was restarted after five
seconds. The agent death rate was variable, and was
a parameter of the simulation process. The choices
of which hosts or agents should be killed for test
purposes were random.
All the tests included a number of mobile agents
which had to complete their round-trips across the
network of hosts. Their itineraries were dynamically
determined at the time of start-up. They stayed five
seconds at each of the hosts. The percentage of
agents which succeeded in visiting all the hosts and
returning to the place of their origin determined the
level of system reliability.
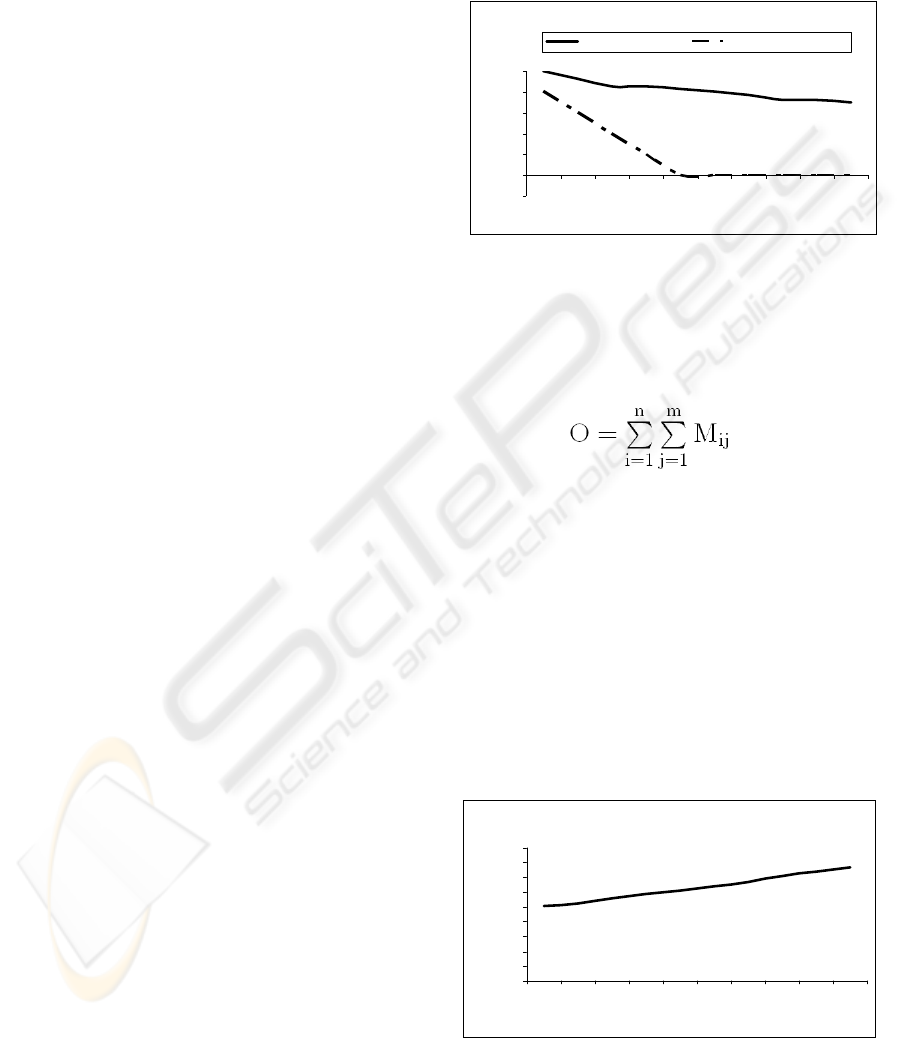
Our first experiment included a fixed number of
mobile agents and a variable number of agent faults.
The results of this experiment are shown in Figure 2.
It can be concluded that EFTL greatly improves
system reliability, even in the cases of high failure
rates. If we compare the reliability of a multi-agent
system with and without EFTL support, we can see
that EFTL is capable of delivering a high reliability
level to a system which would completely fail
without its support.
Reliability
-20
0
20
40
60
80
100
12345678910
Nr. of agent deaths per 10 seconds
Reliability [%]
Reliability (with EFTL) Reliability (without EFTL)
Figure 2: System reliability with and without EFTL
support
The following experiments calculated the
messaging overhead which was generated by EFTL.
In the first experiment calculating this overhead, we
used the formula:
O – messaging overhead
n – number of reliable agents
m – number of published EFTL messages
M
ij
– size of the message j, published or received
by the agent i
(equal to 0 if the agent i did not publish or receive
message j)
The experiments showed that there was no
dependency between the agent failure rate and the
messaging overhead. However, the overhead was
related to the number of mobile agents presented in
the test-bed system.
Messaging overhead
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
10 12 14 16 18 20 22 24 26 28
Nr. of agents
messaging [bytes]
Figure 3: Messaging overhead [size of published
messages]
ICEIS 2005 - SOFTWARE AGENTS AND INTERNET COMPUTING
116
As can be seen in Figure 3, messaging overhead
slightly increases with the number of reliable agents
in the system. However, this messaging overhead is
so small that it can be compared to the overhead of
the migration of one agent between two hosts.
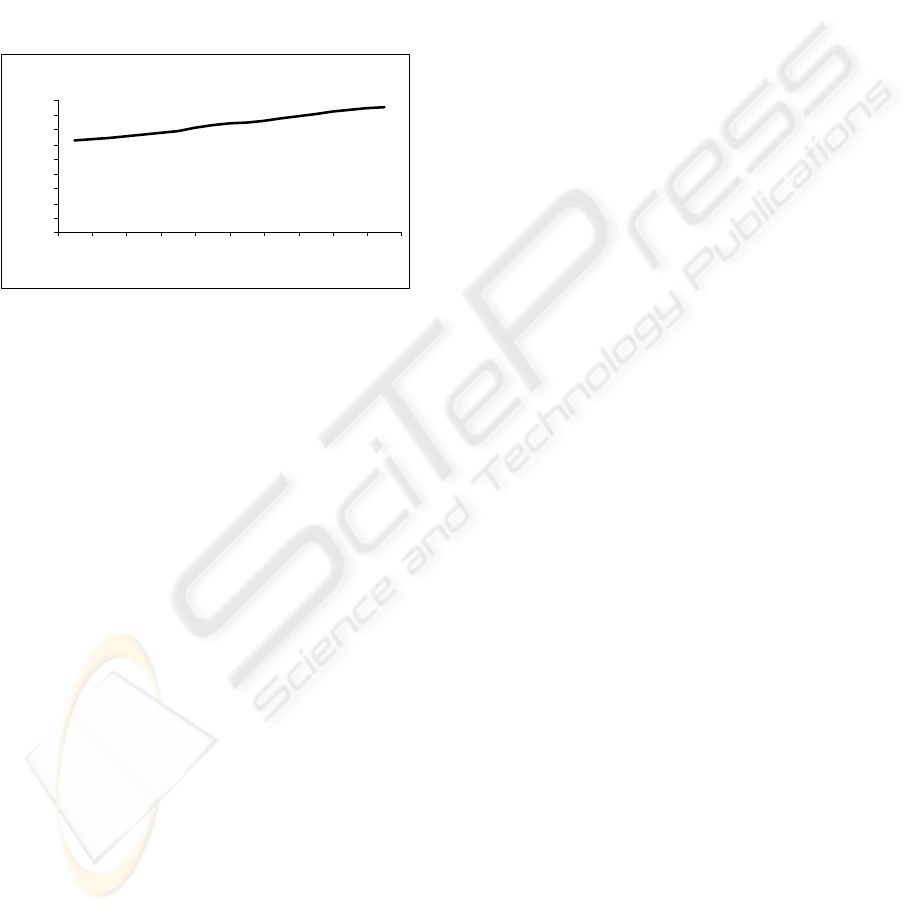
In addition, Figure 4 shows that the number of
messages published in the EFTL internal messaging
subsystem grows with the number of reliable agents
present in a multi-agent system. The publishing and
delivery of these messages is rapid because they are
small in content size. This does not generate any
notable operation slowdown on an agent level.
Figure 4: Messaging overhead [number of published
messages]
7 CONCLUSION AND FUTURE
WORK
EFTL introduced a substantial amount of platform-
independence in the multi-agent fault-tolerant
approaches. The idea to move as many components
of the fault-tolerant system out of the agent
platforms, using standard tools, allowed us to
preserve agent autonomy and mobility. In addition
to this, we proposed the use of the persistent
publish/subscribe messaging model which employs
context-aware message selection at the message
brokers. This allowed us to decrease the messaging
overhead which has to be present in any fault-
tolerant solution. Our modification of the model,
with the usage of the Mobile Connector, guarantees
the exactly-once consumption of messages. Since all
the components of EFTL can inherit fault-tolerance
and scalability of the application, web and
messaging servers, we can claim that our approach
offers an extra level of reliability and high
availability. Moreover, EFTL introduced negotiable
fault-tolerant support based on the costs. An
application or an agent can choose if it wants an
extra level of reliability accompanied by costs that
can be expressed in monetary terms or the additional
usage of system resources.
Our future work will be focused on the
development of different platform-independent
checkpointing procedures with the use of Java
reflection, and on the more adaptive mechanisms of
EFTL usage and deployment in regard to its
overheads.
REFERENCES
Bellifemine, F.; Caire, G.; Trucco, T.; Rimassa, G., 2003.
JADE administrator’s guide, TILAB S.p.A., Italy
Cao, J.; Feng, X.; Lu, J.; Chan, H.; Das, S.K., 2002.
Reliable message delivery for mobile agents: push or
pull
, Parallel and Distributed Systems, 2002.
Proceedings Ninth International Conference on, 314 –
320.
Messaging overhead
0
20
40
60
80
100
120
140
160
180
10 12 14 16 18 20 22 24 26 28
Nr. of agents
Nr. of messages
Cao, J.; Zhang, L.; Yang, J.; Das, S.K., 2004.
A reliable
mobile agent communication protocol
, Distributed
Computing Systems, 2004. Proceedings. 24th
International Conference on, 468 – 475.
Dake, W.; Leguizamo, C.P.; Mori, K., 2002.
Mobile agent
fault tolerance in autonomous decentralized database
systems,
Autonomous Decentralized System, 2002.
The 2nd International Workshop on, 192 – 199.
Dalmeijer, M.; Rietjens, E.; Hammer, D.; Aerts, A.;
Soede, M., 1998.
A reliable mobile agents
architecture,
Object-Oriented Real-Time Distributed
Computing, 1998. (ISORC 98) Proceedings. 1998
First International Symposium on, 64 – 72.
Eustace, D.; Aylett, R.S.; Gray, J.O., 1994.
Combining
predictive and reactive control strategies in multi-
agent systems,
Control, 1994. Control '94. Volume 2.,
International Conference on, 989 – 994.
Fedoruk, A.; Deters, R., 2002. Improving fault-tolerance
by replicating agents,
Proceedings of the first
international joint conference on Autonomous agents
and multiagent systems: part 2,
ACM Press New
York, NY, USA, ISBN:1-58113-480-0, 737 – 744.
Grantner, J.L.; Fodor, G.; Driankov, D., 1997.
Using fuzzy
logic for bounded recovery of autonomous agents,
Fuzzy Information Processing Society, 1997. NAFIPS
'97. 1997 Annual Meeting of the North American, 317
– 322.
Lyu, R. M.; Wong, Y. T., 2004. A progressive fault
tolerant mechanism in mobile agent systems,
Retrieved April 25, 2004, from
http://www.cse.cuhk.edu.hk/~lyu/paper_pdf/
SCI2003.pdf
Macedo, A.; Silva, F., 2002.
Coordination of mobile
processes with mobile groups,
Dependable Systems
and Networks, 2002. Proceedings. International
Conference on, 177 – 186.
Mohindra, A.; Purakayastha, A.; Thati, P., 2000.
Exploiting non-determinism for reliability of mobile
agent systems,
Dependable Systems and Networks,
GENERIC FAULT-TOLERANT LAYER SUPPORTING PUBLISH/SUBSCRIBE MESSAGING
117

DSN 2000. Proceedings International Conference
on, 144 – 153.
Moreau, L., 2002. A fault-tolerant directory service for
mobile agents based on forwarding pointers,
Proceedings of the 2002 ACM symposium on Applied
computing,
ACM Press New York, NY, USA,
ISBN:1-58113-445-2, 93 – 100.
Padovitz, A.; Zaslavsky, A.; Loke, S. W., 2003.
Awareness and Agility for Autonomic Distributed
Systems: Platform-Independent Publish-Subscribe
Event-Based Communication for Mobile Agents, the
1st International Workshop on Autonomic Computing
Systems, DEXA 2003, Prague, Czech Republic
Patel, R. B.; Garg, K., 2004. Fault-tolerant mobile agents
computing on open networks, Retrieved April 18,
2004, from
http://www.caip.rutgers.edu
/~parashar/AAW-HiPC2003/patel-aaw-hipc-03.pdf
Pechoucek, M.; Dobisek, M.; Lazansky, J.; Marik, V.,
2003.
Inaccessibility in multi-agent systems,
Intelligent Agent Technology, 2003. IAT 2003.
IEEE/WIC International Conference on, 182 – 188.
Taesoon, P.; Ilsoo, B.; Hyunjoo, K.; Yeom, H.Y., 2002.
The performance of checkpointing and replication
schemes for fault tolerant mobile agent systems,
Reliable Distributed Systems, 2002. Proceedings. 21st
IEEE Symposium on, 256 – 261.
Zhigang, W.; Binxing, F., 2000.
Research on extensibility
and reliability of agents in Web-based Computing
Resource Publishing,
High Performance Computing in
the Asia-Pacific Region, 2000. Proceedings. The
Fourth International Conference/Exhibition
on, Volume: 1, 432 – 435.
Zhou, J.; Jia, Z.; Chen, D., 2003.
Designing reliable
communication protocols for mobile agents
,
Distributed Computing Systems Workshops, 2003.
Proceedings. 23rd International Conference on, 484 –
487.
ICEIS 2005 - SOFTWARE AGENTS AND INTERNET COMPUTING
118
