
LEVELS OF ABSTRACTION IN
PROGRAMMING DEVICE ECOLOGY WORKFLOWS
Seng W. Loke, Sea Ling, Gerry Butler and Brett Gillick
School of Computer Science and Software Engineering
Monash University,
CaulfieldEast, VIC 3145, Australia
Keywords:
device ecology, workflow, abstraction levels, Web services, end-user control.
Abstract:
We explore the notion of the workflow for specifying interactions among collections of devices (which we
term device ecologies). We discuss three levels of abstraction in programming device ecologies: high-level
workflow, low-level workflow and device conversations, and how control (in the sense of operations issued
by an end-user on such workflows or exceptions) is passed between levels. Such levels of abstraction are
important since the system should be as user friendly as possible while permitting programmability not only
at high-levels of abstraction but also at low levels of detail. We also present a conceptual architecture for the
device ecology workflow engine for executing and managing such workflows.
1 INTRODUCTION
We envision device ecologies comprising collections
of devices (in the environment and on users) inter-
acting synergistically with one another, with users,
and with Internet resources, undergirded by appro-
priate software and communicating across the living
room or across nations. There has been significant
work in building the networking and integrative in-
frastructure for such devices, within the home, the of-
fice, and other environments and linking them to the
global Internet. For example, UPnP (UPnP Forum,
2000a), SIDRAH (Durand et al., 2003) and Jini (Mi-
crosystems, 2001) provide infrastructure for devices
to be inter-connected, find each other, and utilize each
other’s capabilities. Embedded Web Servers (Ben-
tham, 2002) are able to expose the functionality of de-
vices as Web services. Approaches to modelling and
programming such devices for the home have been
investigated, where devices have been modelled as
software components, collections of objects (Associ-
ation of Home Appliance Manufacturers, 2002), and
Web services (Matsuura et al., 2003). Recent work
has developed frameworks for aggregating, compos-
ing and building connections among networked de-
vices (Omojokun and Dewan, 2003; Kumar et al.,
2003; Butler, 2002; Newman et al., 2002; Kohtake
et al., 2003; Vildjiounaite et al., 2003; Sousa and Gar-
lan, 2003; Masuoka et al., 2003). However, there has
been little work on specifying at a high level of ab-
straction (and representing this specification explic-
itly) how such devices would work together at the
user-task or application level, and how such work can
be managed. Our earlier work in (Loke, 2003) in-
troduced device ecology workflows as a metaphor for
thinking about how collections of these devices (or
devices in a device ecology) can work together to ac-
complish a purpose. (Rodrigues et al., 2004) investi-
gates mechanisms to permit a robot to recognize valid
commands in spoken sentences that may not be en-
tirely grammatically correct. This forms a building
block for the input of device commands.
In this paper, we define levels of abstraction for
programming device ecology workflows and describe
how these levels interact. We also show how work-
flow operations issued by a user at one level of ab-
straction can map down to operations at another level
of abstraction and how exceptions in the lower level
can be reflected to the upper level. We aim to pro-
vide a framework for programming device ecologies
where new levels of abstraction can be built from
the lower levels, as needed. We contend that such a
formally grounded construction is important for task-
based programming in general (e.g., (Masuoka et al.,
2003)). Our contribution is to focus on the work-
flows designated by multiple commands to different
devices, and the mapping of these workflows between
languages at different levels of abstraction. Since
the upper level is intended to form the user inter-
face, we represent workflows in an English-like lan-
guage. The lower level could be represented by lan-
guages such as BPEL4WS (Microsoft et al., 2003) or
137
W. Loke S., Ling S., Butler G. and Gillick B. (2005).
LEVELS OF ABSTRACTION IN PROGRAMMING DEVICE ECOLOGY WORKFLOWS.
In Proceedings of the Seventh International Conference on Enterprise Information Systems, pages 137-144
DOI: 10.5220/0002543701370144
Copyright
c
SciTePress

DysCo (Piccinelli et al., 2003). In our work we have
used BPEL4WS.
The rest of this paper is organized as follows. Sec-
tion 2 describes the notion of device ecology work-
flows via an example and also introduces two device
ecology workflow languages at different levels of ab-
straction and how they formally relate to each other.
We also consider conversations with devices at the
lowest level of abstraction. The user should have con-
trol over the workflow execution and tasks within the
workflows. In Section 3, we consider how user spec-
ified operations on workflows are related across the
different levels of abstraction and how exceptions are
reflected up to higher levels. We describe the concep-
tual architecture of a system for executing the multi-
layered workflows in Section 4 and briefly outline our
current prototype. We conclude with future work in
Section 5.
2 PROGRAMMING DEVICE
ECOLOGIES
2.1 Device Ecology Workflows
Devices can work together with other devices, the
user (e.g., seeking approval for critical tasks) or Web
resources in accomplishing its goals, either as initi-
ated by users or by proactive smart devices. As illus-
tration, consider a device ecology workflow involv-
ing a television, a coffee-boiler, bedroom lights, bath-
room lights, and a news Web service accessed over
the Internet.
Figure 1 graphically depicts this workflow. The
dashed arrows represent sequencing, the boxes are
tasks, the solid arrow represents a control link for
synchronization across concurrent activities, and free
grouping of sequences (i.e., the boxes grouped into
the large box) represents concurrent sequences. This
workflow is initiated by a wake-up notice from Jane’s
alarm clock which we assume here is issued to the
Device Ecology Workflow Engine when the alarm
clock rings. This workflow can be described us-
ing BPEL4WS or other Web service workflow lan-
guages such as DysCo, and executed using a special-
ized workflow engine as outlined in (Loke, 2003).
2.2 User Command Language
One could create device ecology workflows as men-
tioned above using some tools. However, abbreviated
commands would make end-user programming sim-
pler. Such commands can then map down to lower
level workflows. We consider a small example of such
Figure 1: An Example Device Ecology Workflow
a two-level model. The top level is a small user com-
mand language, which we call eco, comprising com-
mands that can be combined for sequential or parallel
execution. For simplicity, we consider a device ecol-
ogy with only a few devices. Inspired by (Omojokun
and Dewan, 2003), we consider two kinds of com-
mands, those which affect a single device and those
which affect multiple devices. Commands affecting
multiple devices are directed to a pseudo device that
issues single-device commands to the appropriate de-
vices. In fact, the Device Ecology Workflow Engine
performs this function. It need only be provided with
a predefined command set, expressed in eco, describ-
ing how to break down multi-device commands. This
procedure can be nested to any depth, where each
level of nesting corresponds either to a recursive call
to a single instance of the Engine, or to the invocation
of a separate instance.
The eco command language is defined as follows
in EBNF:
Sentence ::= Clause (";" Clause)
*
"."
Clause ::= ActionClause | WaitClause
ActionClause ::= Prep
*
Opn Parm
*
Prep
*
Device
WaitClause ::= "wait for" Device
The symbols Device, Opn, Parm and Prep are
terminals. Device, which is always a noun in the
English-like language, designates the appliance that
an operation (a verb) is directed to. Parm designates
optional parameters. Prepositions (Prep) allow for the
insertion of words such as the or a to improve read-
ability. wait for specifies a synchronization point.
An example of an expression in the above language
is as follows:
turn on room lights; close drapes;
show news on television.
Each of the above expressions in the language can
then be translated into a workflow expressed in a
lower level language. Since we assume that each de-
vice can be operated on via invocation of Web ser-
vices, this lower level language is BPEL4WS. Note
ICEIS 2005 - SOFTWARE AGENTS AND INTERNET COMPUTING
138

that some of the commands, although different in the
command language, might invoke the same Web ser-
vices with different parameters. The commands in the
task language are a combination of a verb and a noun,
some commands with parameters such as ‘news’. In
practice, the vocabulary of verbs and nouns can be
based on a task ontology such as CLEPE (Ikeda et al.,
1998). Alternatively, the nouns and verbs can be ex-
tracted dynamically by a service discovery process.
This is the approach we have taken here, which in-
volved dynamically creating the parser’s lexical ana-
lyzer from terminal symbols discovered at runtime.
The reason for the additional level of commands
above the BPEL4WS level is abstraction, so that the
user does not think of device ecology workflows in
terms of Web services but rather in terms of what
he/she observes or would expect of the devices in
everyday terms. For example, a user who does not
know anything about Web services can still com-
mand the device ecology based on the high-level com-
mands.
Moreover, many of these high-level commands are
applicable in different settings. For example, any
room that has lights can be commanded with “turn
on all lights” but such a command will translate into
a different low-level workflow, depending on what
lights are available in the room itself. Such transla-
tions from high-level commands to low-level work-
flows can be pre-defined (e.g., by an administrator
who is either a vendor or a savvy user) for each room
using methods such as that presented above. Hence,
the high-level command to turn on all lights has a dif-
ferent meaning or interpretation which is predicated
on the actual room (i.e., the actual device ecology)
the command is issued against. We term such com-
mands polydeco commands, referring to commands
whose meaning is device ecology dependent.
There would also be commands that are applica-
ble for different devices, and depending on the de-
vice, such commands will take on different mean-
ings (and interpretation). For example, the command
“switch on” can be applied to a light or to the tele-
vision and the command “open” can be applied to
drapes or to doors. We term such commands polyde-
vice commands. Similar to polydeco commands, the
actual meaning of the polydevice commands can be
pre-defined, i.e., mappings from each command on a
device can be mapped to a conversation with the de-
vice.
Ideally, a user, through experience of and general
knowledge about the world, knows intuitively how to
command devices and device ecologies, and so, does
not need to learn about Web services or learn a new
command set for every room visited or for every de-
vice encountered. There will be devices that an indi-
vidual would not know about (e.g., new innovations)
or would not know the full features of - the user will
then need to learn new commands, perhaps adding to
those already available by general knowledge.
2.3 Device Ecology Workflows in
BPEL4WS
BPEL4WS represents concurrent execution of
processes by service invocations within a flow
construct, and sequential execution by a sequence
construct. Interfaces between processes and with the
environment are represented by messages whose type
and structure can be defined from primitive types.
Messages are received into variables, which form the
basis of communication between processes.
2.4 Translation
Each command in the top level language is translated
into a device ecology workflow in BPEL4WS. We as-
sume that there is a device ecology workflow engine
for executing BPEL4WS specifications - we return to
this point later. A command might be translated into
a set of alternative workflows in the lower level lan-
guage, where if one alternative fails during execution,
another can be tried. Eco expressions are translated
into BPEL4WS flow constructs, except where the wait
operator signifies sequential execution. For example,
the following expression:
turn on room lights; wait for lights;
show news on television.
is translated into the following core commands in
BPEL4WS. (assign commands have been omitted in
the interests of brevity.):
<sequence>
<invoke partnerLink="lights"
portType="lights:lightsSoap"
operation="turn"
inputVariable="turnIn">
</invoke>
<invoke partnerLink="television"
portType="tv:tvSoap"
operation="show"
inputVariable="showIn">
</invoke>
</sequence>
where [turn on lights] maps to a lower level
workflow where a number of lights are turned on (cor-
responding to a number of Web service calls) and
[close drapes] is a Web service call.
The mappings from high-level commands to lower
level workflows need to be kept in order that faults
at the lower level might be reflected up to the cor-
responding commands, since the user perceives the
commands as the units of activity.
LEVELS OF ABSTRACTION IN PROGRAMMING DEVICE ECOLOGY WORKFLOWS
139

2.5 Conversations with Devices
In the lower level workflow, we have assumed that
each task refers to a Web service call. In a simple
extension to this model, each such task on a device
might require a series of invocations on one or more
Web service calls on the device. For example, to turn
on a light, the system might first make a Web service
call to query the status of the light, and if the light
is off, then make a call to another Web service (also
to the same device) to switch the light on. In short,
in general, a conversation with a device (comprising
several Web service exchanges of the kind modelled
by the Web Services Conversation Language (World
Wide Web Consortium, 2002) ) might be required for
a workflow task on the device.
Finite state machines can be used to model such
conversations as in (Benatallah et al., 2003). For ex-
ample, to switch the light on would involve first in-
voking the get status service and then based on the
result returned, possibly invoking another Web ser-
vice to turn the light on. The device itself might make
calls back to the device ecology workflow engine that
is executing the workflow - for example, to notify a
subscriber who registered to be notified of an event.
UPnP devices will tend to require such conver-
sations. For example, the UPnP specification for
a printer device (UPnP Forum, 2000b) has actions
(which can be viewed roughly as method calls) such
as GetPrinterAttributes, GetJobAttributes, CreateJob
and CancelJob. Hence, cancelling a job with a printer
might involve first inquiring about a job before issuing
a cancel, or a task to print a document might involve
sending the job to the printer and then waiting for it to
finish (either checking the job status, or if supported,
registering to be notified of a job completion event).
3 END-USER CONTROL OF
DEVICE ECOLOGY
WORKFLOW EXECUTION:
INTER-LEVEL WORKFLOW
MANAGEMENT
Execution of a high-level device ecology workflow
will result in execution of low-level device ecology
workflows, which, in turn, will result in conversa-
tions with devices. We allow the user to control work-
flow execution by issuing workflow operations to the
workflow engine.
The mapping between levels of workflows implies
that interruptions to workflow execution due to faults
will need to be reflected upwards to the higher level
workflow. For example, the command to turn on room
lights will fail if one of the lights cannot be turned
on. At this point, either a rollback occurs in which
lights turned on are switched off or in cases where
a rollback is inappropriate or impossible, some com-
pensatory action needs to be performed.
In addition, control at the higher level workflow
needs to be propagated to the lower levels. For exam-
ple, if the command to turn on room lights has been
issued, but the user decides to revoke this command
(or simply to terminate the higher-level workflow in
the midst of execution) and the resulting lower-level
workflow has started but not yet completed (e.g., only
one of three lights have been switched on), then the
lower-level workflow must also be stopped (and roll-
back or compensatory actions performed). What we
have is a situation akin to nested transactions in data-
bases. However, we have greater complexity in the
case where several different operations are possible
on device ecology workflows, including start, stop,
but also operations such as suspend and resume, undo
(similar to rolling back), which when issued for a
high-level workflow must be reflected down to lower-
levels, and from the lower-levels down to the indi-
vidual workflow task level (i.e. to the device con-
versations). For example, a cancel operation on a
task of a high-level workflow might translate down
to cancelling the corresponding low-level workflow
which in turn translates down to cancelling a device
conversation. But different possible translations are
possible. Suppose that a low-level workflow instance
is executing and in the middle of a conversation be-
ing carried out with the device, cancelling the corre-
sponding low-level workflow translates down to cer-
tain other service invocations to reverse the state of
the device, instead of simply stopping the conver-
sation. Also, cancelling a high-level workflow task
might translate down not to cancelling the low-level
workflow but triggering certain compensatory tasks.
For greater flexibility, what is required is a means to
specify the translation semantics of operations on the
high-level workflow to operations on the low-level
workflow, and of operations on the low-level work-
flow to operations on device conversations.
In the following subsections, we introduce opera-
tions on tasks and operations on workflows and illus-
trate their correspondences.
3.1 Operations on a Task
Given a task in a workflow, the state diagram in Fig-
ure 2 shows the operations on the task and what states
the task would move to as a result. A task can be in
any of five states: not started, executing, suspended,
completed, and abnormally terminated, and the al-
lowable operations are defined to be start, cancel,
done, undo, pause, and resume. Not all the opera-
tions make sense in all the states, and so the diagram
only shows the operations which makes sense in each
ICEIS 2005 - SOFTWARE AGENTS AND INTERNET COMPUTING
140
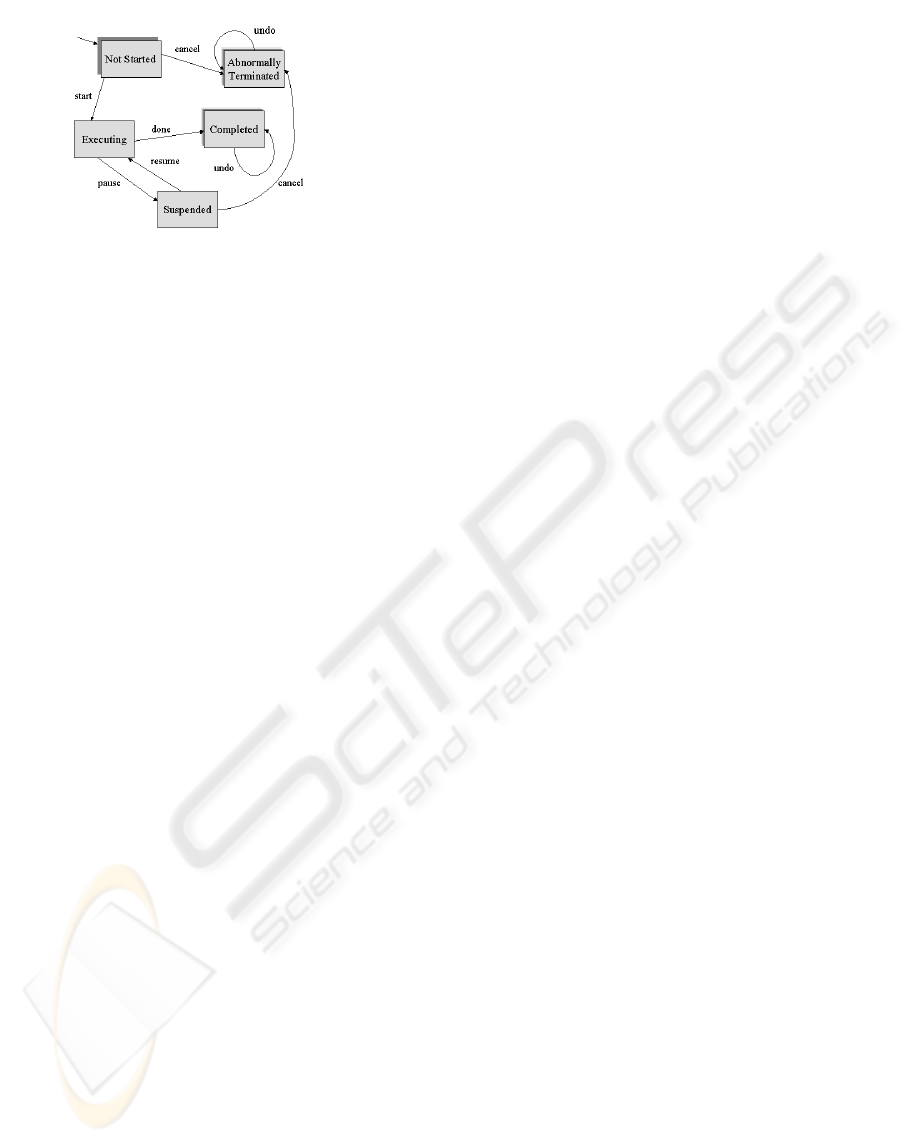
Figure 2: State diagram for operations on a task.
of the states. Moreover, only changes on the task
state due to the operations are shown, and not the ef-
fects of the operations on the devices (or the devices’
states). The task state is stored within the device ecol-
ogy workflow engine.
A task either maps to a (1) conversation in the case
of the task being within a low-level workflow, or to
a (2) low-level workflow in the case of the task be-
ing within a high-level workflow (e.g., the task is a
high-level single device or multidevice command as
in Section 2).
1. If a task involves a conversation with the device,
the task state of “executing” would mean that the
conversation is happening and service calls are be-
ing made with the device, “suspended” would mean
that no service calls are currently being made even
if some calls have already been made (e.g., in the
middle of a conversation) and so, resuming would
mean the conversation with the device is contin-
ued, “completed” would mean that the conversa-
tion completed normally as pre-specified, and “ab-
normally terminated” would mean that the task did
not involve a conversation that completed based on
what is prescribed as normal (the conversation was
abruptly cancelled). Typically, we do not expect
it be possible to cancel or pause in the middle of
a service call, and so, a cancel or pause issued to
the task while a service call is made will take ef-
fect only after the call has returned. However, it is
sometimes possible to terminate an on-going oper-
ation of a device - e.g., cancelling a print job.
Starting a task would mean beginning a conversa-
tion between the device ecology workflow engine
and the device. Operations start, cancel, pause, and
resume have the same semantics for different de-
vices, whereas the operation undo would depend
on the device. The device can either provide an
undo service call which reverses effects since the
start of the conversation (or a compensatory ser-
vice call (e.g., as defined in (Benatallah et al., 2003)
for Web services in general) for non-reversible ef-
fects to compensate for effects since the start of the
conversation), or an undo (a compensatory) service
call for identified calls in the conversation. For
example, a light might support service call(s) to
switch it on and off, which have complementary
effects. If the device provide no such (effect re-
versal or compensatory) calls, then the effect of a
user’s request to undo a task cannot be effectively
performed by the device ecology workflow engine,
i.e. undo might be supported on some devices but
not for others. Sometimes, it is not that a device
doesn’t support compensatory service calls but that
it is physically impossible to undo an action. For
example, cancelling a submitted and queued (but
not yet executed) print job is possible, whereas re-
versing a print job where the document has already
been printed is not.
2. If a (high-level) task maps to a low-level workflow,
the operations on the high-level task then maps to
operations on the corresponding workflow, as ex-
plained in the next two subsections.
3.2 Operations on a Workflow
We can now define operations on a (high-level or low-
level) workflow in terms of corresponding operations
on tasks within the workflow.
• To start a workflow would mean to start the first
task of the workflow.
• To cancel a workflow would mean to cancel all
tasks of the workflow, whether the tasks have not
yet been started, or suspended (a completed task
cannot be cancelled but might be undone). Com-
pleted tasks are not affected. A cancellation should
be issued after a pause.
• To undo a workflow is to undo all completed or ter-
minated tasks, and can only be carried out if all the
tasks are either completed or terminated (e.g., if the
workflow has been cancelled). An undo should be
issued after completion or cancellation of the work-
flow.
• To pause a workflow is to suspend all currently ex-
ecuting tasks.
• To resume a workflow is to resume all currently
suspended tasks.
Workflows for businesses have explored operations
such as cancel (Aalst et al., 2003) but the operations
we attempt to support are richer here since substan-
tial control needs to be provided for users of device
ecologies.
LEVELS OF ABSTRACTION IN PROGRAMMING DEVICE ECOLOGY WORKFLOWS
141

Figure 3: An example mapping from operation X on a
high-level workflow operation to corresponding operations
on tasks in a low-level workflow. The down arrows denotes
‘translates down.’
3.3 Correspondence of Operations in
High-Level Workflows with
Operations in Low-Level
Workflows
Operations on high-level workflows are mapped to
operations on tasks within the high-level workflow in
the manner described earlier. But an operation on
a task of a high-level workflow, where the task is
mapped not to a conversation with a device but to
a low-level workflow, will be mapped to an opera-
tion on the low-level workflow. The operation on a
low-level workflow then maps to operations on tasks
within the low-level workflow in the manner desribed
earlier.
Figure 3 shows an example route where an opera-
tion on a high-level workflow is mapped to operations
on tasks within a low-level workflow. n operation X
on a high-level workflow (issued by the user say) is
mapped to operation X on three tasks P, Q, and R
of the workflow. Each of these operations are sub-
sequently mapped down to device conversations. The
figure shows the mapping for the operation X on task
P. Because task P corresponds to a low-level work-
flow W, the operation X on P is effectively an opera-
tion X on W. The operation on the workflow W is then
mapped to operation X on task A and B in W. The op-
eration X on task A (involving device A, say) and the
operation X on task B (involving device B, say) will
result in conversations via calls to Web services for
device A and for device B.
Using our example on turning on lights, once a
workflow for
turn on all lights; wait for lights;
open drapes.
has been issued, it will start to execute. After
some time, before completion, if the user now issues
a pause command, the command will be translated
down to the task level, and the workflow will be sus-
pended according to the semantics given above. The
aim of the operations on tasks and operations on the
workflows is to allow user control (at user’s will) over
them, even during their execution.
3.4 Handling Faults
So far, we have not considered in detail the map-
ping upwards of faults occurring in service calls dur-
ing conversations to faults in low-level workflows and
then to faults in high-level workflows.
Mapping rules are required in order to define how
an exception in a service call within a conversation
will be manifested at the high-level workflow, and ul-
timately to users. Depending on such definitions, the
response to an exception might be to cancel and undo
operations (including compensatory actions). More-
over, some faults might not be reflected up to higher
levels and need only be dealt with at a lower level. If
a high level task corresponds to two alternative low-
level workflows, a fault in one low-level workflow can
be handled by first undoing the effect of the parts of
this workflow that has executed and then starting the
alternative workflow. Alternatively, some effects of
operations might not be rolled back or compensated
but can be safely ignored - depending on the applica-
tion scenario.
As example, consider the high-level task to turn on
all lights in the room. Such a high-level task translates
down to a low-level workflow and on execution of
the low-level workflow, perhaps only two of the three
lights are successfully turned on (say light 2 is faulty).
One way to handle the problem is ignore the fault and
continue with the other tasks in the workflow, which
makes sense in this example. Another way to handle
this fault is to undo the entire workflow (undoing any
successful operations before encountering the fault -
switching light 1 off) and stop. A third way to handle
the problem is to suspend the workflow when the fault
is encountered (say detected when the service call to
light 2 fails) and query the user about what to do (e.g.,
to undo the workflow or ignore the fault). The first so-
lution is less obtrusive, to silently (with respect to the
user) ignore faulty operations and complete the work-
flow, but logging faults detected for future analysis
and reporting. All three solutions can be supported by
the device ecology workflow engine but the actual be-
haviour in a particular workflow has to be pre-defined
(again by an administrator or a savvy user).
Solutions to deal with dynamic changes in work-
flow have been discussed at a higher-level of abstrac-
tion in terms of business process (Aalst, 2001). Some
of the techniques can be applied to our work, but the
focus will be on dealing with device failure and ser-
vice failure.
ICEIS 2005 - SOFTWARE AGENTS AND INTERNET COMPUTING
142

Figure 4: Multilayered Conceptual Architecture for Device
Ecology Workflow Engine
4 PROTOTYPE ARCHITECTURE
AND CURRENT
IMPLEMENTATION
The conceptual architecture for the engine that ex-
ecutes and manages device ecology workflows is
shown in Figure 4. Roughly, each layer of the archi-
tecture shows the components required to manage a
level of abstraction. Note that user operations on an
executing workflow such as cancel, pause, etc, can
be issued during workflow execution - not shown in
the diagram. The system keeps track of the corre-
spondences between device conversations and the as-
sociated tasks in the low-level workflow, and between
tasks in the high-level workflow and the associated
low-level workflows, in order that exceptions are cor-
rectly reflected up (if required) through the abstrac-
tion levels. If there is an exception in a call to de-
vice, it can be traced to its corresponding low-level
workflow task and then to its corresponding high-
level workflow task. For example, if there is an ex-
ception in the call to switch on a light, it can be traced
to the high-level task of turning on all lights, and the
system might report to the user that there is an error
in carrying out that high-level task but allow the user
to drill down to specific faults in the lower levels.
We are currently developing a prototype of our
system with a subset of BPEL4WS as the low-level
workflow language. Figure 5 shows the DecoFlow ap-
plication with a sample BPEL4WS document loaded
for visualisation. On the left side of the editor win-
dow is a tree displaying all of the information ob-
tained from the BPEL4WS document. On the right
hand side is the visualisation of the BPEL4WS doc-
ument which is represented by a series of connected
nodes which represent the process and activities from
the BPEL4WS document.
Figure 5: DecoFlow application with a sample BPEL4WS
document
5 CONCLUSION AND FUTURE
WORK
We have discussed three levels of abstraction: high-
level workflow, low-level workflow and device con-
versations, involved in programming device ecology
workflows, and how inter-level control is passed be-
tween levels. Such levels of abstraction are important
since the system should be as user friendly as possible
while permitting programmability not only at high-
levels of abstraction but also at low levels of detail.
We can consider more than the three levels of ab-
straction. One can iteratively build higher level com-
mand languages over the top level command lan-
guage, allowing workflows to be specified at an even
higher level of abstraction, but all linked within a uni-
form formal model. Future work also involves con-
tinuing our prototype implementation of our model
in a device ecology workflow engine which supports
the translation semantics and fault handling schemes
described earlier, and to extend our BPEL4WS low-
level workflow language with tasks that link to con-
versation specifications. Moreover, other work on dy-
namically selecting devices for a particular task such
as (Kumar et al., 2003; Butler, 2002) are complemen-
tary to our work - techniques can be considered in
using semantics to select devices for a workflow at
run-time. We are also working on methods to analyze
device ecology workflows before execution (Loke and
Ling, 2004). We are also working on an ontology of
polydeco and polydevice commands.
ACKNOWLEDGEMENTS
We would like to thank the Australian Research
Council for partial funding of this work.
LEVELS OF ABSTRACTION IN PROGRAMMING DEVICE ECOLOGY WORKFLOWS
143

Trademarks. UPnP is a trademark of UPnP Forum.
Jini is a trademark of Sun Microsystems.
REFERENCES
Aalst, W. (2001). Exterminating the dynamic change bug:
A concrete approach to support workflow change. In-
formation Systems Frontiers, 3(3):297–317.
Aalst, W., Hoftede, A., Kiepuszerski, B., and Barros, A.
(2003). Workflow patterns. Distributed and Parallel
Databases, 14(3):5–51.
Association of Home Appliance Manufacturers (2002).
Connected Home Appliances Object Modelling, CHA-
1-2002. Available at http://www.aham.org/.
Benatallah, B., Casati, F., Toumani, F., and Hamadi, R.
(2003). Conceptual Modelling of Web Service Con-
versations. Technical Report HPL-2003-60, HP Labs.
Bentham, J. (2002). TCP/IP Lean: Web Servers for Embed-
ded Systems (2nd Edition). CMP Books.
Butler, M. (2002). Using Capability Profiles for Appliance
Aggregation. Technical Report HPL-2002-173, HP
Labs.
Durand, Y., Vincent, S., Marchand, C., Ottogalli, F., Olive,
V., Martin, S., Dumant, B., and Chambon, S. (2003).
SIDRAH: A Software Infrastructure for a Resilient
Community of Wireless Devices. In Proceedings of
the Smart Objects Conference (SOC’03), Grenoble.
Ikeda, M., Seta, K., Kakusho, O., and Mizoguchi, R.
(1998). An Ontology for Building a Conceptual Prob-
lem Solving Model. In ECAI98 Workshop on Applica-
tions of ontologies and problem-solving model, pages
126–133, Brighton, England.
Kohtake, N., Matsumiya, K., Takashio, K., and Tokuda, H.
(2003). Smart Device Collaboration for Ubiquitous
Computing Environment. In Proceedings of the Work-
shop on Multi-Device Interface for Ubiquitous Periph-
eral Interaction at the 5th International Conference on
Ubiquitous Computing (UbiComp’03).
Kumar, R., Poladian, V., Greenberg, I., Messer, A., and
Milojicic, D. (2003). Selecting Devices for Aggrega-
tion. In Proceedings of the WMCSA 2003 (to appear).
Loke, S. (2003). Service-Oriented Device Ecology Work-
flows. In Orlowska, M., Weerawarana, S., Papa-
zoglou, M., and Yang, J., editors, Proceedings of the
International Conference on Service-Oriented Com-
puting, Lecture Notes in Computer Science 2910,
pages 559–574, Trento, Italy. Springer-Verlag.
Loke, S. and Ling, S. (2004). Analyzing Observable Behav-
iours of Device Ecology Workflows. In Proceedings
of the 6th International Conference on Enterprise In-
formation Systems, pages 78–83, Portugal.
Masuoka, R., Parsia, B., and Labrou, Y. (2003). Task Com-
puting - the Semantic Web meets Pervasive Comput-
ing. In Proceedings of the 2nd International Semantic
Web Conference (ISWC 2003), Florida, USA.
Matsuura, K., Haraa, T., Watanabe, A., and Nakajima, T.
(2003). A New Architecture for Home Computing. In
Proceedings of the IEEE Workshop on Software Tech-
nologies for Future Embedded Systems (WSTFES03),
pages 71–74.
Microsoft, IBM, Siebel, BEA, and SAP (2003). Business
Process Execution Language for Web Services Version
1.1. Available at http://www-106.ibm.com/
developerworks/library/ws-bpel/.
Microsystems, S. (2001). Jini Network Technology. Avail-
able at http://wwws.sun.com/software/jini/.
Newman, M., Sedivy, J., Edwards, W., Smith, T., Marcelo,
K., Neuwirth, C., Hong, J., and Izadi, S. (2002). De-
signing for Serendipity: Supporting End-User Config-
uration of Ubiquitous Computing Environments. In
Proceedings of the Conference on Designing Interac-
tive Systems (DIS2002). Available at http://www.cs.
berkeley.edu/˜jasonh/publications/dis2002-speakeasy
-browser.pdf.
Omojokun, O. and Dewan, P. (2003). A High-Level
and Flexible Framework for Dynamically Composing
Networked Devices. In Proceedings of the 5th IEEE
Workshop on Mobile Computing Systems and Appli-
cations (WMCSA 2003).
Piccinelli, G., Finkelstein, A., and Williams, S. (2003).
Service-Oriented Workflows: the DySCo Framework.
In Proceedings of the Euromicro Conference, Antalya,
Turkey. Available at http://www.cs.ucl.ac.uk/
staff/A.Finkelstein/papers/euromicro2003.pdf.
Rodrigues, M., Teixeira, A., and Lopes, L. S. (2004). An
Hybrid Approach for Spoken Natural Language Un-
derstanding Applied to a Mobile Intelligent Robot. In
Sharp, B., editor, Proceedings of the 1st International
Workshop on Natural Language Understanding and
Cognitive Science, Portugal.
Sousa, J. and Garlan, D. (2003). From Computers Every-
where to Tasks Anywhere: The Aura Approach. In
Submitted. Available at http://www-2.cs.cmu.edu/
˜aura/docdir/sg01.pdf.
UPnP Forum (2000a). UPnP Device Architecture. Avail-
able at http://www.upnp.org/.
UPnP Forum (2000b). UPnP DeviceType: Printer Device
Template Version 1.01. Available at http://www.upnp.
org/.
Vildjiounaite, E., Malm, E., Kaartinen, J., and Alahuhta,
P. (2003). Networking of Smart Things in a Smart
Home. In Proceedings of the Workshop on the Inter-
action of HCI and Systems Issues in UbiComp (UBI-
HCISYS 2003) at the 5th International Conference on
Ubiquitous Computing (UbiComp’03). Available at
http://ubihcisys.stanford.edu/online-proceedings/
Ubi03w7-Vildjiounaite-final.pdf.
World Wide Web Consortium (2002). Web Services Con-
versation Language (WSCL) 1.0. Available at http://
www.w3.org/TR/2002/NOTE-wscl10-20020314/.
ICEIS 2005 - SOFTWARE AGENTS AND INTERNET COMPUTING
144
