
A FRAMEWORK FOR THE EVALUATION OF AUTOMOTIVE
TELEMATICS SYSTEMS
Gennaro Costagliola, Sergio Di Martino, Filomena Ferrucci
Dipartimento di Matematica e Informatica, Università degli Studi di Salerno,via S. Allende, Baronissi, Italy
Keywords: Human-Computer Interaction, Human Fa
ctors, Virtual Reality, Automotive Systems
Abstract: The evaluation of interfaces for in-car communication and information applications is an important and
challenging task. Indeed, it is necessary not only to consider the user interaction with the interface but also
to understand the effects of this interaction on driver-vehicle performances. As a result, there is a strong
need of tools and approaches that allow researchers to effectively evaluate such interfaces while user is
driving. To address the problem in the paper we propose a framework that has been specifically conceived
for such evaluation. It is based on the integration of a suitable car simulator and an in-car system and allows
us to get a high amount of data and carry out repeatable tests in a safe and controlled environment.
Moreover, the proposed solution is not much expensive and quite simple to set-up.
1 INTRODUCTION
In-car telematics systems have achieved in the last
few years very impressive enhancements in the
number of provided functionality. In fact, while the
early systems supplied mainly some basic route
calculations, currently the more advanced
commercial systems (e.g.: BMW iDrive, Fiat
Connect+ or GM onStar) allow drivers to exploit a
plethora of services, such as web browsing, e-mail
checking, phone calls, playing infotainment, and so
on. For that reason they are also referred as
Intelligent Transportation Systems (ITSs).
Despite this improvement, interaction with ITSs
i
s somehow far to be well understood. This problem
has a fundamental relevance, because in the
automotive domain the user is normally busy in the
demanding and mission-critical task of the driving.
If the system requires too much attention due to a
bad design of the interface, the user can be distracted
from his/her main activity, with potentially fatal
consequences. Many studies conducted on this
argument show that distraction is the most prevalent
cause of crash, accounting till 56% in the USA
(Wang, 1996). Thus, currently there is a profound
concern that these statistics will inflate as the
potential for mental distraction increases with the
growing diffusion of ITSs (Burns 2001, Tijerina
2001). Then, because safety is paramount, many
institutions have identified as a short term priority
the research on Human-Machine Interaction for the
vehicular domain. In particular, safety evaluation of
ITSs, specifically in the context of driver distraction,
is an open and demanding research field.
Such evaluation could be carried out by
ex
ploiting a car simulator in a safe and controlled
environment, in order to get a high amount of data
and carry out repeatable tests. Currently there are
available many car simulators, coming from both the
market and the academia (an interesting list is
provided by Inrets, 2004). Usually these products are
conceived for very complex purposes, such as driver
training, ergonomics evaluations, rapid prototyping,
and road behavior analysis. For that reason, they
require advanced computational resources to handle
the huge amount of numerical data resulting from
the simulation of several complex phenomena.
Consequently, such existing solutions are typically
very expensive (both in terms of required hardware
and software) and/or necessitate very advanced
skills for their set-up.
However, at the best of our knowledge, none of
t
hese products has been specifically conceived for
the evaluation of ITS user interfaces and their
impact on driver distraction. Thus, there is the need
for simpler and cheaper solutions, expressly suited
to address this problem. To this aim, we designed
and implemented a solution, which turns out to be
much more economical and easy to set-up than
others, and at the same time it allows us to perform
effective automotive user interfaces assessments.
3
Costagliola G., Di Martino S. and Ferrucci F. (2005).
A FRAMEWORK FOR THE EVALUATION OF AUTOMOTIVE TELEMATICS SYSTEMS.
In Proceedings of the Seventh International Conference on Enterprise Information Systems, pages 3-11
DOI: 10.5220/0002532500030011
Copyright
c
SciTePress

The proposal is composed of three main modules:
a driving simulator, a telematics system simulator,
and some facilities suited to support running tests
and to enhance driver sense of presence in the virtual
scene. As for the car simulator, we successfully
adopted the Racer free simulation engine, which
offers a wide set of features useful for our purposes.
Instead the ITS was implemented by our team
exploiting some automotive rapid prototyping tools.
Both the components can execute on traditional
hardware in order to limit the costs. Finally, the
further facilities are standard electronic equipment,
such as some video-cameras and a SVGA projector.
In this paper we report on the experience we
gained from that project, in order to allow other
research centers to easily set-up similar solutions.
The remainder of the paper is structured as
follows. In section 2 we will introduce the main
aspects to consider when dealing with driver
distraction, as well as the approaches used to
evaluate it. In section 3 we will propose a generic
cost-effective framework for ITS user interface
evaluations, while in section 4 we will describe how
we implemented such framework, detailing the
adopted technical solutions. In section 5 we will
focus on an interesting feature we developed, i.e. the
interaction between the driving simulator and the
navigation assistance software. Finally, a discussion
on final remarks and future work will conclude the
paper.
2 DRIVER DISTRACTION
The recent enhancements in ubiquitous computing
and telecommunication systems have generated a
strong momentum of convergence between these
technologies and find in the automotive telematics a
very interesting field of application. Indeed, current
commercial ITSs are becoming even more some
kind of traditional PC, able to connect to the WWW,
check mail, play MP3 or DVD. Unfortunately, such
growth in the number of services offered has not
been paired by equivalent improvements in the
usability of these systems. Indeed, this is an issue
quite recent and somehow far to be well-established.
Moreover, it is widely recognized that the specific
questions inducted by the vehicular domain do not
allow designers to transpose HCI techniques,
approaches, and interaction metaphors established
for traditional desktop environments (e.g. Marcus
2004). The main difference is that when designing
desktop applications, designers can make the
assumption that the user’s attention will be mainly
focused on the interaction with the system. On the
contrary, when dealing with the automotive domain
designers cannot rely on a significant user attention,
because the interaction with an information system
is only one task among the several actions achieved
at the same time by the user. In particular, the user
performs the main task of driving, and concurrently
(s)he can also do a set of secondary tasks, involving
interactions with entertainment systems, climate
controllers, navigation aids, etc…
It is widely recognized that the use of an ITS
requires driver’s visual and cognitive resources
(Gellatly, 1997). If these demands are “excessive”
then his/her performance on the primary task of
driving may be degraded. If this co-occurs with
other external unexpected events, a crash or a near
miss may result. Many efforts have been devoted in
the literature for understanding mechanisms behind
driver distraction inducted by ITSs. However, there
is still much research to carry out about the
interaction with these systems: the current situation
recalls what happened in the ’70, with the
proliferation of many different attempts to design the
“definitive” Graphical User Interface (GUI).
Similarly, nowadays we can find on the market
dozens of different approaches, devices, and
metaphors for vehicular systems.
As a result, there is a strong need of tools and
approaches allowing researchers for an effective
evaluation of these interaction proposals.
2.1 Evaluation of Driver-Vehicle
Performances
From all the issues exposed above, it is clear that the
evaluation of an ITS User Interface (UI) is
something far from the evaluation of traditional UIs.
Indeed, it is necessary not only to consider the user
interaction with the interface but also to understand
the effects of this interaction on driver-vehicle
performances.
2.1.1 Methods
Static evaluations of vehicular systems carried out
when user is totally focusing on the system, provide
not much information about the effectiveness of the
UI. Instead, it is necessary to set up a meaningful
test-bed where the user is mainly focused on the
primary task of driving and concurrently interacts
with the system. Moreover, such test-bed should
allow researchers to evaluate driver performances by
taking into account some useful indicators. To set up
such kinds of test-bed, usually the following two
approaches are adopted: (I) the interaction with an
ITS is analyzed while the user is driving a real car
on a track closed to the traffic, or (II) the driving is
simulated in a laboratory. Each of the two
ICEIS 2005 - HUMAN-COMPUTER INTERACTION
4

approaches presents some advantages and
drawbacks. The former one is probably more
realistic, because the user drives a “real” car, but it
requires the availability of a closed track and a car
equipped with specific instrumentation able both to
capture information such as travel speed and lane
position and to video record the road scene and
driver eye glance (e.g. Tijerina, 1998). However, the
major drawback of this approach derives form the
difficulty of exactly reconstructing a complex
scenario (involving asynchronous events) to
replicate the experiment, which is essential to
effectively assess the UI.
On the contrary, driving a car simulator has the
substantial advantage that tests are accomplished in
a safe and controlled environment, where the risk of
personal injury and property damage is eliminated.
Moreover, it is more comfortable for researchers,
which can get a higher amount of data and carry out
more repeatable tests, by presenting to different
users the same scenario.On the other hand, the use of
car simulators is effective to evaluate many different
and complex aspects concerning with the automotive
research. As a matter of fact, several universities,
companies and research centers, such as the UMTRI,
the NADS and the Iowa University, have realized
sophisticated laboratories equipped with car
simulators. These systems are usually intended as
“complete” driving simulators, able to simulate a
high variety of physical phenomenon ranging from
the kinematics effects inducted by different
suspension geometry, to very complex traffic
scenarios. Nevertheless, these laboratories usually
cost hundreds of thousands of dollars and are very
difficult to set-up. As an example, the outstanding
simulation facilities installed at UMTRI have a total
cost of over than $ 250.000 (Green, 2003).
2.1.2 Metrics and parameters
In order to assess an ITS UI it is important to
quantify the safety degree of the considered ITS.
Nevertheless, safety cannot be directly measured
(probably except in retrospect) (Tijerina, 2001).
Thus, several indirect measures of safety have been
proposed that are based on the evaluation of driver
distraction inducted by the system (e.g. CAMP,
2000). Summarizing, it is possible to say that
distraction can be both visual and cognitive (looked-
but-did-not-see). This leads towards to two main
drawbacks: degraded vehicle control and degraded
object/event detection (Brown, 1994). Usually, the
former situation arises when the driver’s eye glances
away from the road scene (without taking into
account factors such as driver fatigue) resulting in
problems in lane-keeping, speed maintenance, etc…
The latter instead is usually due to an excessive
cognitive workload (for example inducted by a cell
call), and is a more insidious to evaluate, because
vehicle control remains largely unaffected but
detection and reactions of unexpected object and
event is degraded (Tijerina, 2001).
These considerations suggest several indicators to
take into account to measure driver distraction. As
an example, measurement of speed maintaining
performance is a good indicator for the evaluation of
visual attention, but says nothing about the selective
withdrawal of attention that might be inducted by an
excessive cognitive workload (Tijerina, 2001). Other
indicators are driver eye glance behavior, durations,
and scanning patterns, lane-keeping, speed
maintenance, car following performance, and driver
reaction times to asynchronous events. Finally,
measures of the in-vehicle task, such as task
completion time, have been used or are being
proposed as an index of the distraction potential of a
device (Green, 1998).
3 THE PROPOSED FRAMEWORK
The purpose of our research was to implement a
framework for supporting the evaluation of
automotive telematics system user interfaces. The
main goals of our proposal were:
– To be specifically suited for telematics
assessment, i.e. don’t caring about extreme
realism or other simulation aspects, such as road
conditions, different engine types, kinematics of
suspensions, etc...,
– To effectively support running tests, i.e. easily
collect the needed data about subjects behaviors,
– To be cost-effective both in hardware and human
resources, i.e. being able to execute on standard,
economic hardware, without requiring complex
installations or set-ups.
– To allow us to test the navigator module in the
virtual environment. This implies that the driving
module and the navigator have to share the same
map and the information about the car position.
It is worth to point out that currently usability
evaluations of navigation systems are performed
using real cars and not simulators (e.g.: Tijerina,
1998), because, at the best of our knowledge,
currently there aren’t simulation environments
offering this fundamental feature.
Such evaluation framework is intended as a
composition of three main kinds of facilities, i.e. a
driving simulator, a telematics system, and some
instrumentation to record subject’s interactions. In
the following subsections we will detail the
characteristics of these components, while in section
A FRAMEWORK FOR THE EVALUATION OF AUTOMOTIVE TELEMATICS SYSTEMS
5

4 we provide a more deeper description of the
framework we set-up in our lab and in section 5 we
will describe the link between the driving simulator
and the navigator module.
3.1 The Driving Simulator
The main aim of this simulator is to propose a
realistic driving environment, which should facilitate
running experiments. In the meantime test subjects
should receive credible feedbacks from their actions
(e.g.: steering wheel shake when leaving the lane
and going off-road), as well as feel a sense of
presence in the virtual environment (Green, 2003).
These goals may be achieved by a simulator able to:
1. Provide a realistic dynamics program governing
the behaviour of the virtual vehicle.
2. Provide realistic rendering of the scenario with
a frame rate of at least 30 fps.
3. Enhance the sense of presence in the virtual
scenario. This can be achieved by projecting the
simulated scenario onto a wide-screen that
covers a significant subject’s angle of view, by
providing a realistic spatial audio, by using at
least a 5.1 surround system, and by providing
realistic force-feedbacks on the steering wheel.
To ensure the effectiveness for the evaluation, the
simulator should provide further some specific
features. Among these, there is the possibility to
generate asynchronous external events to test driver
workload. For example, other simulated cars on the
track with their own behavior (e.g. braking, turning,
etc…) can add much meaningfulness to the
simulation.
Another fundamental aspect for supporting
experiments is the telemetry logging, i.e. the
recording of the numerical data on what the car and
the driver are doing. This because by analyzing this
information it is possible to better understand user’s
behaviors and feedbacks to specific events,
recognizing potential degraded vehicle controls (i.e.
problems in lane-keeping or speed maintenance) or
degraded object/event detection (i.e. abnormal delay
between an asynchronous event and driver
response). Moreover, having an history of these
data, it is possible to compare driver performance
when altering external factors, such as different
sensorial channels used to provide information to the
user, or different layouts/organizations for
graphical/vocal user interfaces. The most relevant
information to store deals with the vehicle dynamics,
the asynchronous events generated by the simulator
(i.e. the traffic), and the user inputs. For example,
basing on this set of data, it is possible to recognize
degraded vehicle controls (i.e. problems in lane-
keeping or speed maintenance) or degraded
object/event detection (i.e. abnormal delay between
an asynchronous event and driver response).
Finally, the driving simulator should provide
some user-friendly tools for designing tracks and
scenarios.
3.2 The ITS Simulator
About the telematics simulator, its main
characteristic regards the possibility to easily define
or modify the User Interface. Indeed, in order to
assess different proposal, the simulator should
permit to change the appearance and the behavior of
the widgets composing the interface, to modify their
displacement on the screen (in order to verify
different layouts) and to rearrange the menu item
clustering. Moreover, if the assessment regards also
multi-modal aspects, the simulator should provide
speech-to-text and text-to-speech technologies, and
even some primitives for defining haptic feedbacks.
Finally, this simulator should also facilitate
running experiments, i.e. it should collect significant
data and measurements about both the asynchronous
events generated by the telematics system (i.e. route
guidance indication or an incoming call), and the
subject behaviors.
About non-functional requirement, the simulator
should execute on traditional hardware. If the system
is developed together with an automotive OEM, the
use of standard embedded technologies can add
great value, permitting the porting of some modules
on automotive hardware.
3.3 Other facilities
To complete the framework, there is the needing of
some other instrumentation, useful to perform
comprehensive data collection about subject’s action
and distraction, such as eye-tracking. This can be
accomplished with a set of standard video-cameras,
placed in hidden spots. The minimal configuration,
as suggested by (Green, 2003), consists of three
cameras, one recording the subject’s face, one the
vehicle interior, and one the forward scene. The first
shot reflects anxiety and difficulties with a task,
showing in the meantime the eye’s glance and where
subjects are looking. The second one shows control
use and may be analyzed to determine task times and
the number of errors, while the third one is useful to
show the primary source of demand.
ICEIS 2005 - HUMAN-COMPUTER INTERACTION
6
4 AN IMPLEMENTATION OF THE
FRAMEWORK
In the last three years, there was a strong
collaboration between our faculty and the HMI
department of one of the most important European
automotive manufacturers. As a result, we defined
some novel ITSs interfaces. Thus we needed some
facilities to assess these proposals, having however
strong economical constraints about the resources
we could dedicate to this aim.
By conducting deep evaluations on open-source
driving simulators, and by developing some specific
applications, we were able to set-up a test-bed
facility matching the requirements exposed in the
previous section. In particular, we implemented the
above depicted framework by integrating two
different modules: a free driving simulator, Racer
(Van Gaal, 2000), and a prototype of next generation
telematics system we developed.
About the major features provided by the
framework, it offers an extensive data logging of
driver inputs and vehicle motion, the audio/video
recording of user actions, and the possibility to
define arbitrary tracks, with basic traffic
characteristics. Moreover, a distinguish feature of
our proposal is the possibility to tightly connect the
simulator and the telematics system, by sharing the
same track/map, as will be detailed in section 5. This
allows us to conduct extensive and effective
assessment on the navigator module.
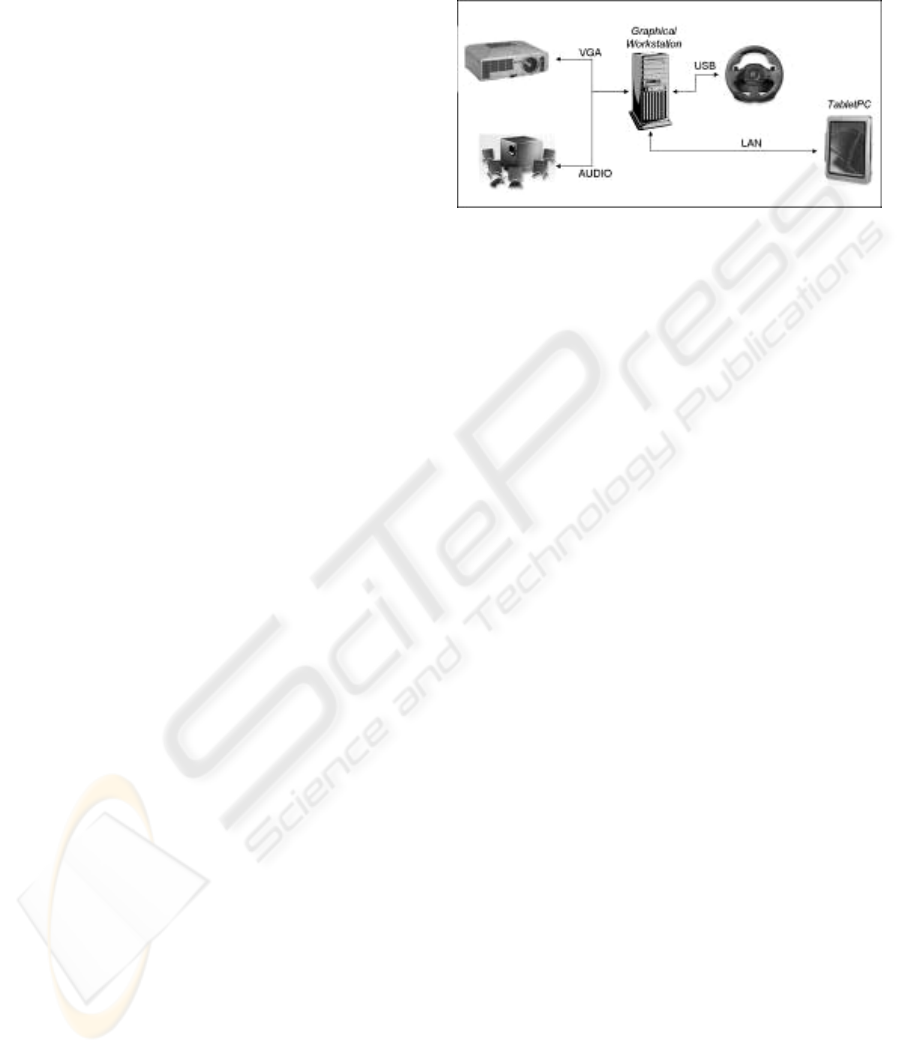
4.1 The basic architecture
The proposed system is mainly based on two
software modules, running on two different PCs.
The resulting architecture, shown in Figure 1, is
composed of:
– A graphical workstation, suited to run the
simulation engine. In our lab we adopted an HP
Ewo W6000, based on an Intel Xeon 2,8 Ghz,
512 Mb of RAM, an nVidia Quadro4 video card
and a Creative Labs Audigy audio card; the
operating system is Windows XP Pro, SP2.
– A tablet PC, suited to execute the telematics
system simulator. In our lab we adopted an HP
tc1100, 512 Mb RAM, running Windows XP
Tablet edition.
– A force-feedback wheel, with rudders. We
selected the Logitech Formula Force GP, which
seemed us a very good compromise between
price and offered features;
– A 5.1 audio system. We selected the Creative
Labs MegaWorks THX 5.1;
– A SVGA projector;
– At least 3 cameras, to record respectively driver
eye glance, interaction with the “dashboard” and
the whole simulation scenario.
Figure 1: The architecture of the framework
4.2 The Simulation Engine
Currently they are available a lot of car simulation
engines suitable for HMI evaluation purposes,
ranging from big and expensive commercial
solutions, such as GlobalSim HyperDrive
(GlobalSim), to small, free and/or open source
projects, such as Torcs. Usually the formers are
mainly focused on simulating with the highest detail
the physics of a vehicle, but they usually have high
costs and require the set-up of lots of parameters to
start the simulation. On the other hands, the latter
very often are focused on providing fun more than
accuracy in simulation, being intended as
videogames. After a wide-ranging evaluation, we
selected the engine named Racer, a free, open-
source car simulation project, because we
experienced that with some particular adjustments to
the configuration files, it was able to accomplish all
the fundamental tasks required for the HMI
evaluation. Indeed, among the main advantages of
this engine, it provides satisfactory physics by using
6 DOF models and motion formulae from SAE, it is
very flexible because almost all simulation
parameters are customizable through ASCII files,
there is a good documentation about the file formats,
it supports force-feedback devices, it provides high-
quality OpenGL rendering (as visible in Figure 2),
the tracks and the scenes can be created with relative
simplicity through many free user-friendly editors,
and last but not least, it is totally free for non-
commercial use.
Finally, Racer allows for a basilar simulation of
traffic conditions, exploiting the features related to
the AI. In particular, the simulation engine allowed
us to program different vehicles to follow specific
routes and behaviors on the track.
A FRAMEWORK FOR THE EVALUATION OF AUTOMOTIVE TELEMATICS SYSTEMS
7

Figure 2: A Racer screenshot
4.3 The telematics system
In 2003, the Department of Mathematics and
Informatics of the University of Salerno and the Fiat
research centre “Elasis” started an EU granted
project aimed to realize a prototype of next-
generation telematics systems. The main goals of
such a prototype were to define an architectural
model for the development of future ITSs, to
evaluate the risks inducted by novel technologies
such as wireless protocols, Bluetooth profiles, etc…,
to evaluate the risks, the costs and the benefits of
novel services, such as tele-aid, remote diagnostics,
etc…, and to conduct usability tests on novel
multimodal interfaces, encompassing vocal, video
and tactile interaction.
Figure 3: Screenshot of the ITS user interface
The system has to provide a wide set of features,
such as GPS Navigator, Entertainment section
(Tuner, CD, MP3- Wma, DVD, DivX), Phone Cell
(calls, SMS), “@ module” (WWW, e-mail), and
“Innovative Services” (remote diagnostics, accident
prevention, tele-aid, etc…). Moreover, it has to
exploit a wide set of Bluetooth protocol profiles,
such as SAP, headset, Sync, FTP, etc, in order to
interact with the typical tomorrow’s Personal Area
Network devices. The prototype was implemented
using C#, for Microsoft .NET platform.
The graphical and haptic user interface developed
for the prototype are described in (Costagliola,
2004c), and shown in Figure 3, while the vocal user
interface was presented in (Costagliola, 2004b).
For this prototype we defined a specific
architecture, characterized by a sharp division
between logics and interface. This allowed us to
successfully employ the system, together with the
simulator, to assess the distraction inducted by
different interface layouts and innovative services,
as well as the effectiveness of multi-sensorial
interactions. Indeed, thanks to a meta-UI generator
based on XML, the prototype consents to modify
with minimal efforts the widgets composing the UI,
their disposition on the screen and the menu
clustering.
Figure 4: The architecture of the developed prototype
Further implementation details of the system, as
well as a description of the innovative and flexible
design pattern we defined for the development can
be found in (Costagliola, 2004a). The resulting
architecture is depicted in Figure 4. Some modules
have been modified from the original project, in
order to best fit simulation needs. In particular, the
modules surrounded by dashed lines have been
replaced by some signals generated by the
simulation engine.
ICEIS 2005 - HUMAN-COMPUTER INTERACTION
8
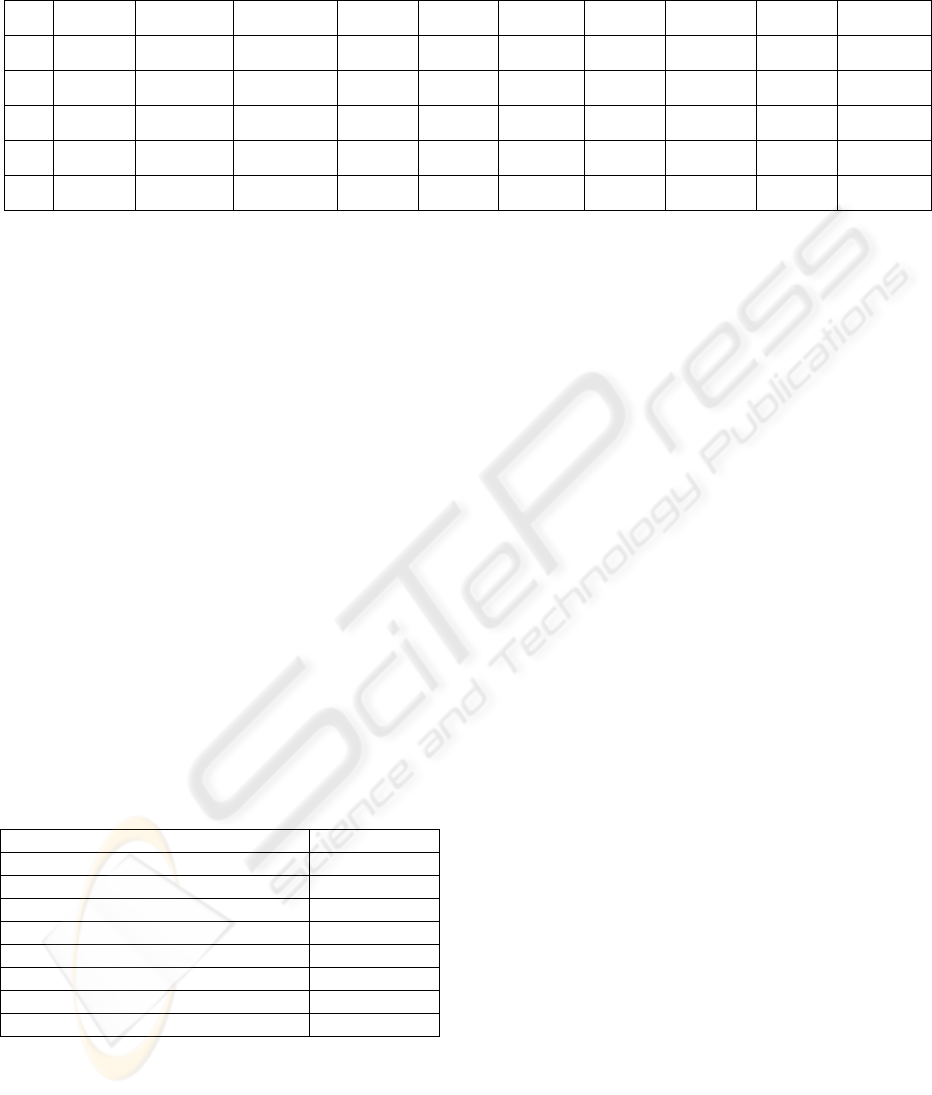
Table 1: Logged data
Racer log file generated at 05-11-2004 12:15:03
time Steer force_feed throttle brake vx vy vz x y z
9895 -8507501 0.000340 0.000000 0.398000 0.001296 -0.000058 0.003972 -57678322 0.516207 245962250
9900 -8507501 0.000443 0.000000 0.398000 0.001786 -0.000051 0.004131 -57678318 0.516207 245962265
9905 -8507501 0.000525 0.000000 0.398000 0.002164 -0.000044 0.004230 -57678314 0.516207 245962280
9910 -8507501 0.000598 0.000000 0.398000 0.002429 -0.000038 0.004320 -57678310 0.516207 245962296
9915 -8507501 0.000662 0.000000 0.398000 0.002599 -0.000033 0.004403 -57678307 0.516207 245962311
4.4 Logging of information
In our system, to record the simulator data, we took
advantage of the logging feature provided by Racer.
Indeed, simply setting the parameter log.enable to 1
in the debug.ini file, it is possible to activate the
registration of the simulation data. Moreover,
changing other parameters in the log section of the
debug.ini file it is possible to indicate what
information to store and the sample frequency. In
our simulator, then, the data coming from the
simulator are stored in a log ASCII file at a
frequency of 20 Hz. An example of such data is
shown in Table 1: every 50 milliseconds, we keep
track of the Steering position, the force-feedback
provided on the wheel, the value of the throttle and
brake, the vehicle speed on the 3 axis, and its
position on the track. As for the telematics systems,
we store all those information, together with the time
they took place, in a space separated ASCII file.
This allow for an easy data analysis with tools like
Microsoft Excel or SPSS.
4.5 Total costs
Table 2: Costs for setting-up the simulator
Item Cost
Graphical Workstation 4,500€
Tablet PC 1,400€
SVGA Projector 750€
Logitech Wheel w/ Force Feedback 60€
5.1 Audio System 100€
#3 Digital Cameras 1,500€
Navtools SDK 5,000€
Total 13,310€
In our opinion, one of the main advantages of our
proposal is in the trade-off between costs and
offered functionality. In Table 2 there are
summarized the costs we sustained for the start-up
of the simulator. As one can see, following our
approach, with less than 15.000 € it is possible to
set-up a test-bed for automotive HMI evaluation,
which is a very significant reduction if compared
with the hundred of thousands dollars usually
required for other driving simulators.
5 INTEGRATION BETWEEN THE
TWO SIMULATORS
A distinguishing feature offered by our
implementation of the framework is the integration
between the simulation engine and the navigator
module on the telematics systems. This means that
the road driven by the user on the car simulator is
shared as a map on the ITS. This permits to exploit
many standard navigation features, such as Map
Display and Route Guidance, namely the process of
generating and then providing to subjects turn-by-
turn graphical/vocal directions for a calculated route.
Such integration is a very powerful instrument,
because it allows us to perform many significant
route guidance experiments. As an example, we can
evaluate the best modality for providing route
guidance to the user (vocal, iconic, etc…), or the
most appropriate vocabulary to support the way-
finding, as well as assess the cognitive work
inducted by these different modalities. At best of our
knowledge, there are no simulators offering such
characteristic.
In the following we will describe how we have
implemented such integration by illustrating how the
driving simulator and the ITS share the same
cartographical information. Moreover, we will
describe how the navigator is aware of the actions
made by the subject in the driving simulator, in
order to update in real time the position of the car
shown on the navigator map, and to undertake the
necessary Route Guidance actions.
A FRAMEWORK FOR THE EVALUATION OF AUTOMOTIVE TELEMATICS SYSTEMS
9

5.1 Sharing the cartography
The navigator we implemented is based on NAVTEQ
technology. This is one of the two standard global
cartographical databases adopted for automotive
systems (the other one is TeleAtlas). Navteq
provides a useful SDK to create navigation system
applications and adopts the open format SDAL
(SDAL, 1999) for the navigation map database. The
SDK comes with some maps, such as the European
one.
On the other hand, Racer adopts its own
graphical file format to represent the tracks, named
DOF1 and based on the SGI IFF file format. DOF1
exploits OpenGL XYZ coordinate system and
contains all the information about the scene graph of
the model. In particular, it holds data about the
geometry objects composing the track, i.e.
information about the vertices and the normals,
together with many other data, such as the texture
used to render the surfaces.
Taking into account the adopted file formats,
there are two ways to share the cartography between
these two simulators. The first one is to create a
SDAL map starting from a DOF1, while the second
one is the reverse approach.
Some initial trials we conducted to create a SDAL
file starting from a Racer track gave us bad results,
mainly because SDAL file format is very complex.
Indeed, it is principally focused on optimization
because it is conceived for automotive systems,
which usually have restricted hardware resources.
As a matter of fact, it makes use of specific and
different data structures for the various features,
such as Map Display (optimized for pan and zoom),
Route Calculation (organized to facilitate rapid route
calculation), and Route Guidance (organized as
manoeuvre parcels containing additional
information needed for direction generation and
route guidance). An overview of the data structures
is provided in (SDAL, 1999). Moreover, this initial
approach compelled us to give up some Navteq
features, such as the estimated travel times for a
given segment.
Instead creating a DOF file from an existing part
of a map resulted more practical, giving us much
better results. Our work then consisted in
implementing a kind of translator able to create the
appropriate DOF1 file starting from a small area of a
SDAL map. In particular, such translator generates
the geometry primitives starting from the parcels
that are the basic units of I/O used in the SDAL
format. Because Navtools SDK provides a wide set
of functions to access SDAL information, the main
difficulty was to correctly estimate a shared scale
factor for the two files, i.e. given a NavTech Unit,
(equal to 1/100,000 of a degree) used to store
latitude/longitude in the SDAL database, to
understand the corresponding value in the DOF1
file.
5.2 Updating the localization
To address the second issue concerning with
updating in real-time the position of the car on the
map we have let the simulator to export information
about the car movements and the navigator to accept
such information as if it comes from GPS sensor. In
particular, it was required to get information about
coordinates, speed, and heading of the car. As
described in 4.4, Racer outputs this information in
its log file. Thus, we implemented a daemon
working in background on the graphical workstation,
listening to the changes in the log file and, after
some elaboration, sending the necessary data on a
TCP socket shared with the TabletPC. Here,
Navtools Vehicle Positioning System provides some
procedures to access an I/O object (the socket) to
compute the vehicle location. Such location can
obviously be used for all necessary navigation
features, such as Map Display, Route Calculation,
and Route Guidance.
6 CONCLUSIONS AND FUTURE
WORK
Safety on the roads is one of the main goals for
everyone involved in the automotive field. The
advent of ITSs can distract user from the main task
of driving the car, with potentially fatal effects.
Nevertheless, it has been estimated that these
systems will become commonplace in the last few
years. Thus, it is a short term priority to investigate
solutions to enhance usability of ITSs and then limit
driver distraction. Currently many research institutes
across the world are involved in the definition of
novel User Interfaces for automotive systems, but
the evaluation of such interfaces is a challenging and
expensive task. Indeed it requires non-trivial
resources, intended both as a private track, cars and
instrumentation, or as very specialized car
simulators in labs.
In this paper we propose a solution for the
evaluation of user interfaces in the automotive
domain by using a simulator. Currently there are
available off-the-shelf many commercial car
simulators, but they are usually more oriented to
represent with the highest realism all the aspects of
the kinematics of a vehicle. As a result, they are very
ICEIS 2005 - HUMAN-COMPUTER INTERACTION
10

expensive (tens or hundreds of thousands of dollars)
other than being relatively difficult to set-up.
Our proposal, instead, is intended to provide the
features suited to evaluate the vehicle-driver’s
performance when using a telematics system, thus
not focusing on extremely detailed simulation
aspects. The consequence is that the complete
simulator can be set-up with less than 15,000 $. In
particular, the proposed solution is composed by a
graphical workstation, running the very interesting
free car simulator, Racer, connected via LAN to a
TabletPC running an our own developed telematics
system, encompassing a wide set of next-generation
services, such as Bluetooth, integrated Cell Phone,
vocal user interface, etc…Both the PCs are able to
provide logging features of the user actions, in order
to record and then analyze driver’s behaviours and
performances during the interaction with the ITS.
Obviously this is the most relevant aspect of the
simulator because it allows researches to evaluate
the distraction inducted by each specific
feature/User Interface of the telematics system.
Moreover, another distinguishing characteristic of
our proposal is the possibility to tightly connect the
simulator and the ITS, by letting them share the
same track/map. This allows us to conduct very
effective and detailed investigations about the
interactions (and the related effects on distraction)
between driver and navigator.
Finally, about future work, we are planning to
exploit a new feature of Racer, i.e. the multiview,
which enables to use multiple computers to render a
widescreen view, as well as we are developing a tool
for the rapid development of automotive user
interfaces starting from visual specifications, in
order to evaluate the distraction inducted by
different control layouts or menu item clustering.
REFERENCES
Brown, I. D., 1994. Driver fatigue. Human Factors, 36
(2), 298-314
Burns, C. Lansdown, C., 2001. E-Distraction: The
Challenges for Safe and Usable Internet Services in
Vehicles
CAMP, 2000. Crash Avoidance Metrics Partnership
(CAMP), Proposed Driver Workload Metrics and
Methods Project
Costagliola, G. et al., 2004a. Towards an Architectural
Design Pattern for Automotive Telematics Systems. In
ICSE 2004 workshop on Software Engineering for
Automotive Systems. IEE Press.
Costagliola, G. et al., 2004b. An Innovative Vocal
Interface for Automotive Information Systems. In
ICEIS’04, 6th International Conference on Enterprise
Information Systems. ICEIS Press.
Costagliola, G. et al., 2004c. Handy: a new Interaction
Device for Vehicular Information Systems. Mobile
Human-Computer Interaction - Mobile HCI 2004,
Lecture Notes in Computer Science, Vol. 3160
Inrets, 2004. List of principal driving simulators, available
at http://www.inrets.fr/ur/sara/Pg_simus_e.html
Gellatly A., 1997. The use of speech recognition
technology in automotive applications. PhD thesis,
Virginia Polytechnic Institute and State University.
Globalsim Hyperdrive Simulator. Info available at
www.globalsim.com
Green, P., 1999. SAE J2364 – Navigation and route
guidance function accessibility while driving.
Warrendale, PA: Society of automotive engineers.
Green P. et al., 2003, Audio-Visual System Design
Recommendations from Experience with the UMTRI
Driving Simulator, in DSC North America 2003
Proceedings, Dearborn, Michigan.
Marcus A., 2004. Vehicle User Interfaces: the next
revolution, Interactions, 1.
SDAL File Format, 1999. Specification available at
www.sdalformat.com
Tijerina L., Parmer, E., Goodman, M., 1998. Driver
workload assessment of route guidance system
destination entry while driving: a test track study. In
Proceedings of the 5th ITS World Congress, Seoul,
Korea.
Tijerina L., 2001. Issues in the Evaluation of Driver
Distraction Associated with In-Vehicle Information
and Telecommunications Systems
Torcs, The Open Racing Car Simulator, available at
http://torcs.sourceforge.net/
Van Gaal, 2000. Racer Simulator Engine, available at
www.racer.nl
Wang, J. S., et al., 1996. The role of driver inattention in
crashes; new statistics from the 1995 Crashworthiness
Data System. Proceedings of 40
th
Annual meeting of
the Association for the Advancement of Automotive
Medicine, Vancouver.
A FRAMEWORK FOR THE EVALUATION OF AUTOMOTIVE TELEMATICS SYSTEMS
11
