
SYSTEM ENGINEERING PROCESSES ACTIVITIES FOR
AGENT SYSTEM DESIGN
Component based development for rapid prototyping
Jaesuk Ahn, Dung Lam, Thomas Graser, K. Suzanne Barber
Leboratory of Intelligent Processes and Systems, University of Texas at Austin, Texas, USA
Keywords: Component based development, agent system des
ign, agent oriented software engineering, repository
Abstract: System designers of agent-based system are challenged by the lack of mature agent software development
methodologies, the diversity of agent technologies, and the lack of a common framework for describing
these technologies challenges architects attempting to evaluate, compare, select, and potentially reuse agent
technology. Leveraging existing work to (1) categorize and compare agent technologies under a common
ontology, (2) build a repository of agent technologies to assist system designer in browsing and comparing
agent technologies, this paper proposes an architecting process and toolkit support to rapidly prototype an
agent-based system by selecting agent technology components in the context of a given high level reference
architecture and associated requirements.
1 INTRODUCTION
Agent technology is now being applied to the
development of large open industrial software
systems (Luck, et al., 2003). Before agent
technologies can be used as generic building blocks,
a methodology must be defined that guides agent-
based system design using agent technology
components. Furthermore, these methods and
supporting tools must accommodate the construction
of software systems that assemble highly flexible
technology components written at different times by
various developers (Griss and Pour, 2001). As a
foundation for defining such methods and tools,
Component Based Software Engineering (CBSE)
offers an attractive approach for building enterprise
software systems (Griss and Pour, 2001) and is
currently a well-developed area of research within
software engineering (Brown, 1996). CBSE works
by developing and evolving software systems from
selected reusable software components, then
assembling them within an appropriate software
architecture. Other approaches to component-based
design of agent systems are often restricted to
object-oriented implementation environments,
usually based on Java (Martin, A et al., 1999), or do
not have the ability to incorporate existing agent
technologies into the design process (Brazier, Jonker
et al., 2002).
In contrast, ongoing research in the Laboratory
o
f Intelligent Processes and Systems at the
University of Texas at Austin offers methods and
tools for the component-based design of agent
systems. Specially, this research concerns four key
steps for component-based agent design:
– Step 1: Identifying a core set of agent
functionalities known as agent competencies
(planning/reacting, modeling, sensing, acting,
organizing, coordinating, communicating) that
adequately address the demands of the domain’s
operational requirements. In other words, the
designer attempts to determine which
competencies the agent must possess to perform
the assigned functional requirements.
– Step 2: Constructing an Agent Reference
Architecture that specifies technology-
independent agent classes that encapsulate agent
competencies.
– Step 3: Specifying agent technology (existing,
envisioned, or under-development) as reusable
components in the context of the agent
competencies and providing a clear model to
evaluate and compare technologies based on the
agent competencies each is capable of delivering.
– Step 4: Constructing an Agent Application
Architecture by browsing, selecting, and
assembling agent technology components that
196
Ahn J., Lam D., Graser T. and Suzanne Barber K. (2005).
SYSTEM ENGINEERING PROCESSES ACTIVITIES FOR AGENT SYSTEM DESIGN - Component based development for rapid prototyping.
In Proceedings of the Seventh International Conference on Enterprise Information Systems, pages 196-202
DOI: 10.5220/0002527401960202
Copyright
c
SciTePress
Communication
Organization
Coordination
Agent Competency
Sensing
Planning Acting
Modeling
Communication
Organization
Coordination
Communication
Organization
Coordination
Communication
Organization
Coordination
Data Acquisition
Data
Pre-Processing
Plan Integration
Plan Generation
Task Allocation
Variable
Characterization
Model Revision
Actuation
Schedule
Realization
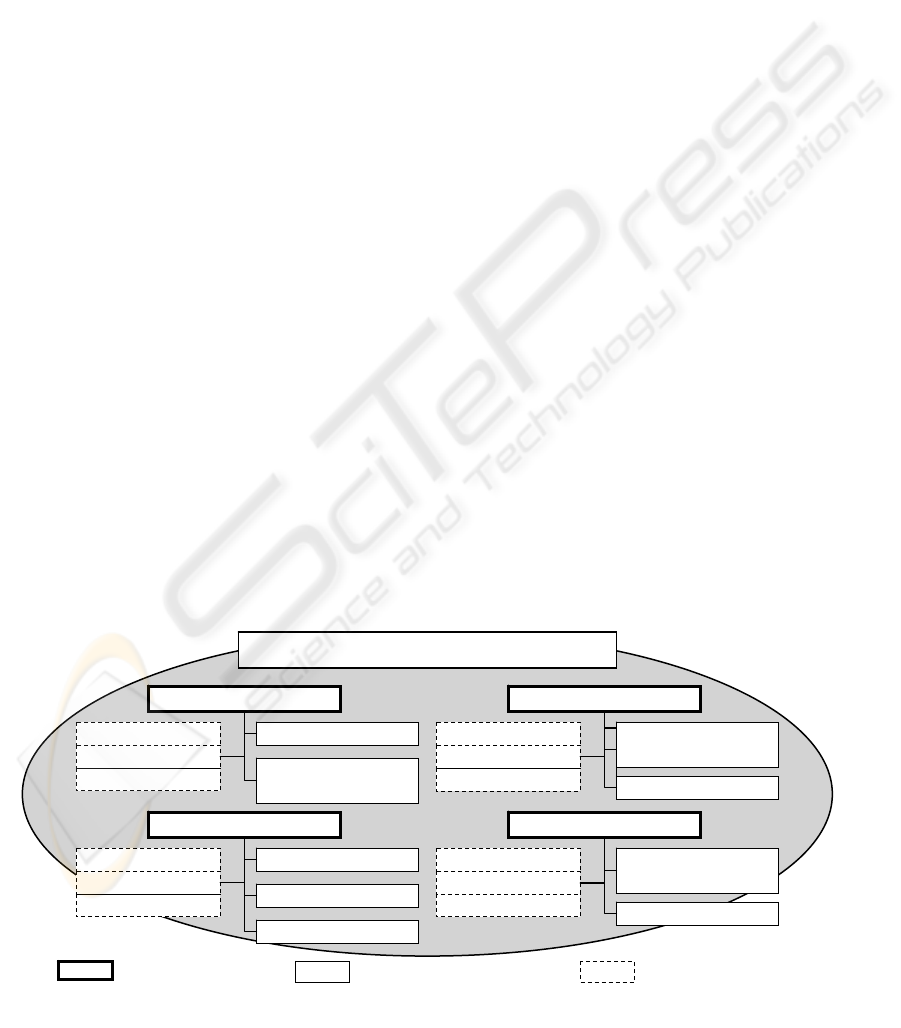
: Core Competency
: Secondary Competency
: Pluggable Competency
Figure 1: Agent Competency Ontology.
fulfill the given requirements captured in the
architecture constructed in Step 2.
The first and second steps were already addressed in
previous work (Barber and Lam, 2003). Barber and
Lam defined a functional agent specification in
terms of Core and Pluggable Competencies as a
means to describe and compare agent interpretations
and models. They also developed a method and tool,
Designer’s Agent Creation and Analysis Toolkit
(DACAT), for architecting an agent based on the
defined Competencies such that the resulting
architecture (Agent Reference Architecture) captures
functional domain requirements. The third step was
addressed by Barber and Ahn (Barber, Ahn et al.,
2004). To address the third process step, the notion
of an Agent Competency Ontology (Barber, Ahn et
al., 2004) was proposed as a common ontology to
represent agent technology at an abstract level of
functional composition, and a repository, the
Technology Portfolio Manager (TPM) (Barber, Ahn
et al., 2004), demonstrated browsing and comparing
agent technologies.
This paper centers on the fourth step, proposing
the architecting of an agent-based system through
the selection of agent technology components that
fulfill functional (Competency) and data
requirements captured in the Agent Reference
Architecture (step 2). The Application architecture
Creation and Evaluation Toolkit (ACET) is
proposed for the fourth step. ACET leverages the
technology repository in the TPM and the
Competency-based Agent Reference Architecture to
derive and evaluate agent-based architectures. An
important premise of this approach is that every
agent technology can be described by agent
competencies. Consequently, the architect can build
an Agent-based Application Architecture by
selecting appropriate agent technologies according
to their coverage of and compliance to both the
functional (Competency) requirements and structure
prescribed by the Competency-based agent
Reference Architecture.
The basic definition of the Agent Competency
Ontology is described in Section 2. An architecting
process and supporting tool to select and assemble
agent technology to create the agent system
architecture is then presented in Section 3.
2 AGENT COMPETENCY
ONTOLOGY
A multi-agent system (MAS) architect is guided by
specific desired agent capabilities and system
properties, in the context of a particular domain.
Thus, agent technologies are developed / selected for
a MAS by considering their application to a
particular domain and their ability to offer desired
capabilities (Competencies). Consequently, the
architect must have a means for viewing and
comparing agent technologies with respect to both
competencies provided and domains supported.
However, when attempting to compare various agent
technologies or simply understand the breadth of
agent technologies, the architect encounters
obstacles that include the disparity in how agents are
modeled and the lack of separation between domain-
dependent functionalities (e.g., determine UAV
route) and domain-independent functionalities (e.g.,
plan generation). As a result of this diversity, agent
developers have difficulty comparing different views
of agent technology or even different
implementations of the same agent technology on
some common basis.
SYSTEM ENGINEERING PROCESSES ACTIVITIES FOR AGENT SYSTEM DESIGN: Component based development
for rapid prototyping
197

Barber and Lam (Barber and Lam, 2003)
proposed Agent Competencies to model agents in a
domain-independent manner. The Agent
Competency Ontology was proposed as a common
representational framework to specify agent
technologies (Figure 2) (Barber, Ahn et al., 2004) .
The Agent Competency Ontology is used to (1) map
domain tasks such as “Generate UAV routing” to
domain-independent competencies such as
“planning” and, in general, (2) offer a common
framework for representing and comparing agent
technologies (Barber, Ahn et al., 2004). By
specifying agent technologies in terms of these
Agent Competencies, the agent technologies can be
functionally compared and a common understanding
among agent software engineers is promoted. Agent
Competencies are based on the essential set of
domain-independent functionalities an agent
delivers. As seen in Figure 1, there are two types of
Agent Competencies that form the framework for
specifying agents.
Core Competencies (CCs) define the essential
functionalities of an agent. Pluggable Competencies
(PCs) are also defined because agents interact with
other agents and entities in the system. PCs are not
essential in single-agent systems, but are required to
describe multi-agent systems (Barber and Lam,
2001). The Core Competencies includes:
Sensing: The agent needs to acquire appropriate
data from other agents and the environment.
Modeling: Modeling is the maintenance of the
information specified by the developer and/or
derived from sensed data.
Planning: In the pursuit of goals, agents need the
capability to choose the appropriate action(s) given
its situation, and decide when and by whom those
actions will be executed.
Acting: Schedules of actions are received and
handled by the acting competency of the agent,
which executes the appropriate actions at the
appropriate times.
Pluggable Competencies: In addition to CCs,
when an agent operates in a multi-agent system, it
may have the functionality to communicate, to form
organization(s), and to coordinate with other agents.
Communication, organization, and coordination are
Pluggable Competencies (PC) because they work in
conjunction with and in the context of CCs.
3 AGENT APPLICATION
ARCHITECTURE
The Agent Application Architecture (Agent AA)
specifies a system design. Leveraging a well-
defined, implementation-independent Agent
Reference Architecture (Agent RA) that captures the
functional, data, and timing requirements, the Agent
AA is a collection of agent technology components
selected according to their coverage of and
compliance to the structure and requirements
prescribed by the Agent RA (Barber and
Bhattacharya, 2000). Using the Agent Competency
Ontology described in Section 2 to specify agent
technologies, a repository of agent technology
specification maintained by the Technology
Portfolio Manager (TPM) (Barber, Ahn et al., 2004)
can be defined that facilitates exploration of
potential agent technologies when building an Agent
AA. In this section, an architecting process is
described for deriving an Agent AA composed of
agent technologies.
Section 3.1 describes knowledge acquisition
process for this research and section 3.2 describes
the Agent RA defined in DACAT and then
demonstrates the use of ACET to specify an Agent
AA.
3.1 Knowledge Acquisition Process
For this research effort, technologies to be included
in this paper were developed as part of the Defence
Advanced Research Project Agency - Taskable
Agent Software Kit program (DARPA-TASK). The
DARPA-TASK program was initiated with the
specific intent to advance state-of-the-art agent
technology as well as promote tools for easy agent-
oriented design and analysis. Numerous universities
and companies, developing a wide spectrum of
technology, were involved in the program. The
process of populating the TPM with DARPA-TASK
technology specifications spanned multiple phases
beginning with the collection of information
available about a technology obtained from filtered
presentations and papers posted by the technology
providers involved in the DARPA-TASK program.
Following initial modeling efforts, every
Technology Provider was interviewed to verify the
technology models and to obtain additional
information which might have been missed from the
gathered information. Agent technologies were
described/modeled in terms of the domain-specific
capabilities of the technology and the domain-
independent agent competencies.
3.2 Specifying Agent Application
Architecture
Agent RA is specified based on class-based
encapsulations and Competency functionality. The
Agent RA consists of (1) the classes that were
ICEIS 2005 - INFORMATION SYSTEMS ANALYSIS AND SPECIFICATION
198
formed, (2) the functionality that each agent class
encapsulates, and (3) the inputs, outputs, and
interactions of the agent class as a result of the
encapsulated functionality (Barber and Lam, 2003).
The Agent RA is constructed in DACAT and output
to an XML file.
The Agent Application Architecture process is
demonstrated in the following sub-sections, where
an Agent AA is derived in the context of an example
domain, UAV target surveillance.
3.2.1 Evaluating the Technology Options for
the Agent AA
Once an architect imports XML files of an Agent
RA from DACAT and a technology repository from
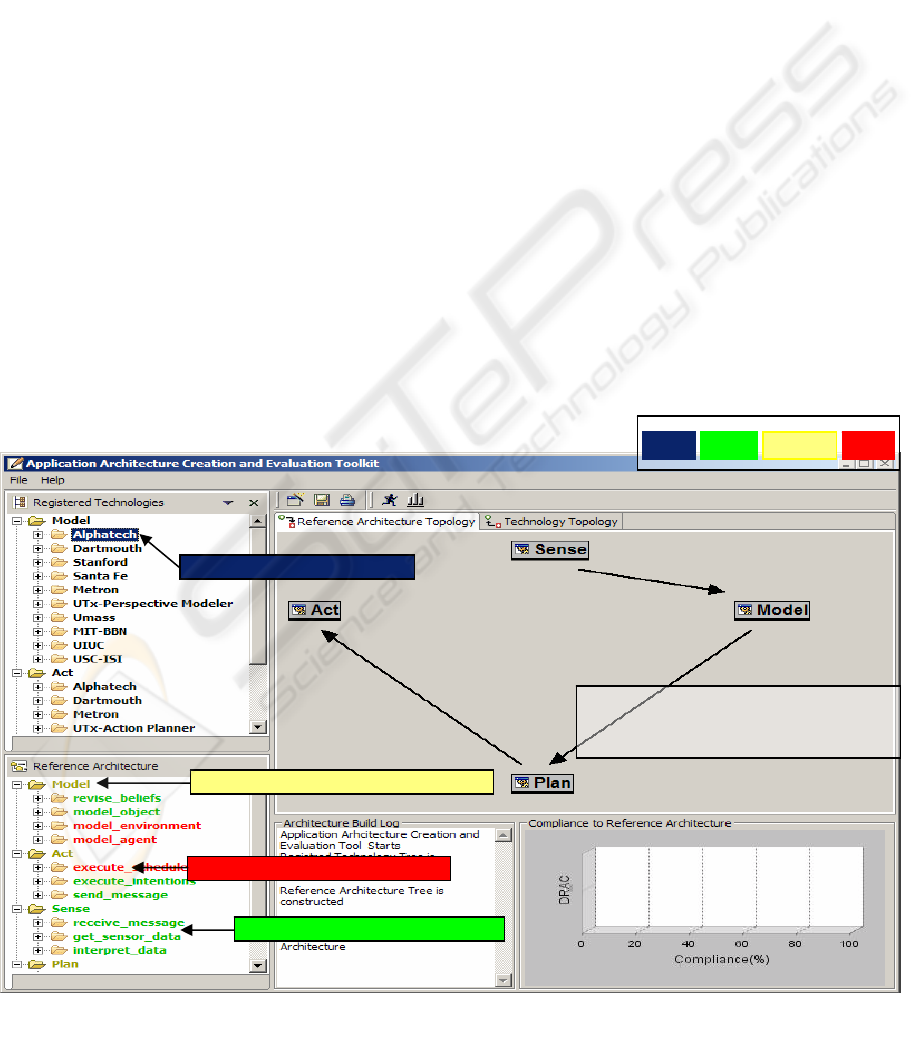
the TPM, ACET provides a graphical representation
of the Agent RA and a technology repository listing
allowing the architect to browse and compare agent
technologies for inclusion in the Agent AA. The
agent technologies from the TPM that can possibly
satisfy the functional (Competency) requirements of
each Agent RA class are displayed in a tree structure
(upper left panel labeled “Registered Technologies”
in Figure 2), and tree structure of the Agent RA is
also displayed in lower left panel (labeled
“Reference Architecture”). By selecting agent
technologies from the tree, an architect can explore
all the possible combinations of registered
technologies that perform a desired task.
ACET responds by indicating the user-selected
technologies in blue (in this case “Alphatech”) and
colors the related Agent RA classes and tasks based
on coverage. If a user selects a technology in the
Registered Technologies panel (Figure 2), Agent RA
classes and Competency tasks (in the Reference
Architecture pane in the lower part of Figure 2) not
performed by the selected technology are colored in
red, while Agent RA classes and Competency tasks
colored in green and yellow are fully and partially
supported by the selected technology, respectively.
3.2.2 Specifying the Agent AA
In this step, the architect selects appropriate
technologies to satisfy the functionality
(Competency) and data requirements specified in the
Agent RA and aligning those technologies to Agent
RA classes. The result is an Agent AA. In ACET,
The Agent AA building space consists of two
topologies: The Reference Architecture Topology
and Technology Topology.
The Reference Architecture Topology (Figure 3)
displays a comprehensive view of the class
structures and associated technologies selected by
the architect to deliver the Agent RA competencies
encapsulated in that class. For each box in the
Reference Architecture Topology view (Figure 3),
Blue Green Yellow Red
“Alphatech” Selected (Blue)
Reference architecture is visualized by
diagram and connection arrow
Partial Support by Alphatech (Yellow)
No Support by Alphatech (Red)
Full Support by Alphatech (Green)
Figure 2: ACET: Building Space for the design.
SYSTEM ENGINEERING PROCESSES ACTIVITIES FOR AGENT SYSTEM DESIGN: Component based development
for rapid prototyping
199
the upper part of the box displays the name of the
Agent RA class and the lower part displays selected
technology for the respective Agent RA class. The
respective boxes are also colored based on the
degree to which the selected technology
delivers/implements all the Competency
functionality encapsulated in the respective Agent
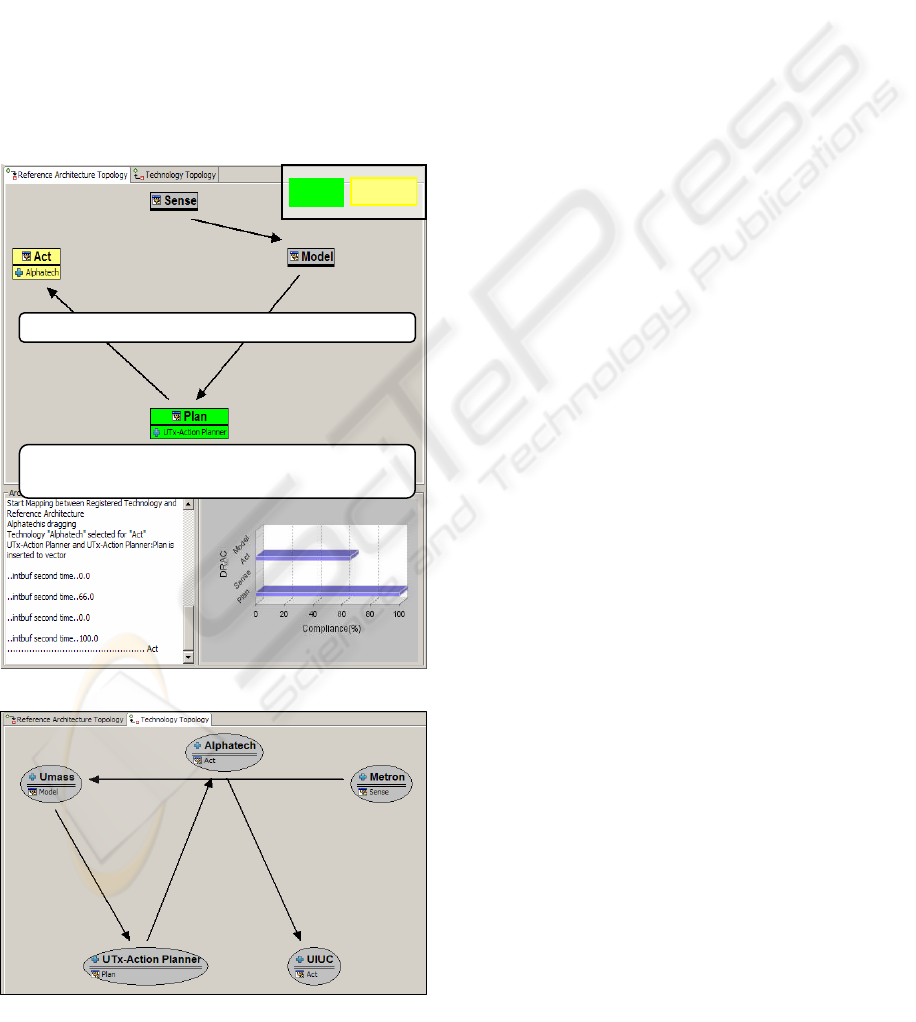
RA. The Technology Topology (Figure 4) displays
the technology component structures and
dependencies exhibited by selected technologies.
Dependencies are due to I/O dependencies between
functionality (Competencies) delivered by respective
technology.
As an architect selects appropriate technologies
to satisfy the functionality specified in the Agent RA
and aligns those technologies to Agent RA classes,
the result is an Agent AA specifying a system
design.
To build an Agent AA in ACET, an architect simply
drags a technology from the registered technology
list and drops it onto the desired agent class in the
Reference Architecture Topology diagram, ACET
then colors the diagram based on how much of the
Competency functionality in the Agent RA class are
satisfied by the selected technology. For example,
“UTx-Action Planner” is selected for the “Plan”
class in Figure 3. A green box indicates that the
selected technology satisfies the entire set of
Competency functionality and dependencies
specified in the class (in this case “Plan”). The
Reference Architecture panel also shows that “UTx-
Action planner” performs all of Competency
functionality of “Plan” class. To assist the architect
in selecting technologies for each class, ACET also
provides a compliance graph (lower right part in
Figure 3). The compliance graph shows what
percentage of the entire set of Competency
functionality in an Agent RA class is delivered by
the selected technology. In Figure 3, “Alphatech” is
selected for the “Act” class. A yellow box indicates
that the selected technology satisfies some of the
Competency functionality and dependencies
specified in the class (in this case “Act”). In this
case, one of the three Competency functional tasks
in the class “Act” is not satisfied by the selected
technology “Alphatech”. Therefore, the compliance
graph indicates there is a 66% compliance value for
the “Act” class.
Yellow
Green
“Alphatech” is selected for “Act” (Yellow)
3.2.3 Evaluating the Agent AA
“UTx-Action Planner” is selected for “Plan”
(Green)
Given a complete specification of the Agent AA, the
evaluation process consists of measuring the
coupling and cohesion of technology components.
The architect’s objective is to select agent
technologies which satisfy all of the Competency
functional tasks and input/output requirements in
Agent RA, as well as keeping the boundary of
functional and input/output structure of the Agent
RA.
Figure 3: Reference Architecture Topology.
The coupling for a technology component is
defined as the total number of connections with
other technology components. Thus, coupling
measures the number of dependencies in which a
technology component is involved. Since
dependencies are directional, coupling is the sum of
input and output coupling. Input coupling is the
number of dependencies a technology component
has on other technology components (i.e., incoming
dependencies), and output coupling is the number of
dependencies other technology components have on
it (i.e., outgoing dependencies).
Cohesion, specifically functional cohesion, is the
degree to which Competency functional tasks within
an Agent RA class are covered by one or more
Figure 4: Technology Topology.
ICEIS 2005 - INFORMATION SYSTEMS ANALYSIS AND SPECIFICATION
200

technologies; thus, cohesion focuses on the
similarity of a technology’s boundaries to an
respective Agent RA class (i.e., the class task and
inputs and outputs). An Agent AA with highly
cohesive technology components indicates that
selected technology components adhere to the class
boundaries prescribed by Agent RA, thereby
respecting the vision of the architect who derived the
Agent RA structure.
Different combinations of technologies yield
different coupling and cohesion values. The Agent
AA derivation process involves exploring possible
technology selections and observing resulting
coupling and cohesion evaluations. Figure 5
illustrates ACET’s evaluation space. The left column
of Figure 5 shows coupling and cohesion metrics
associated with the Agent RA, and the right column
shows coupling and cohesion metrics calculated for
the Agent AA.
For the illustrative example from the UAV target
surveillance domain, both “Alphatech” and “UIUC”
have been selected to provide functionality in the
“Act” Agent RA class. As a result, the coupling
value for “Act” in the Agent AA is greater than the
coupling value for “Act” in the Agent RA. In
addition, the cohesion of “Alphatech” with respect
to the “Act” class is only 66%. The cohesion value
of a class is helpful in measuring the similarity
between the Agent RR and the Agent AA.
4 SUMMARY
When designing a software system architecture
using available technology components (for
envisioned, planned, under-development or existing
technology), an architect evaluates various
technology combinations with respect to the degree
to which selected technologies meet stated
requirements. For a Multi-Agent System
architecture, technologies are evaluated with respect
to (1) agent-related “competencies” provided (core
capabilities that characterize agency including
planning, acting, sensing, modeling, communication,
organization and coordination), and (2) domain tasks
supported (i.e., the problem domain being addressed
by the agent system).
This paper illustrates the Application
architecture Creation and Evaluation Toolkit
(ACET) for deriving the Application Architecture.
ACET supports the architect when performing the
types of trade-off and what-if analyses associated
which selecting appropriate agent technologies to
deliver competencies specified in the Agent RA.
ACET’s interface displays (1) a graphical and
textual representation of the Agent Reference
Architecture (Agent RA), (2) the coverage of
respective Agent RA functionality by respective
agent technologies from various technology
providers, (3) the technologies selected for inclusive
in the Agent AA, and (4) the dependencies between
selected Agent AA technologies.
UIUC (33%)
Alphatech (66%)
Figure 5: Evaluation of Agent Application Architecture.
SYSTEM ENGINEERING PROCESSES ACTIVITIES FOR AGENT SYSTEM DESIGN: Component based development
for rapid prototyping
201

The ACET’s interface also allows the architect to
assess how well selected technologies in the Agent
AA comply to the Competency functionality and
agent classes specified in the Agent RA.
Specifically, ACET allows for the evaluation of the
Agent AA with respect to compliance, coupling, and
cohesion. Compliance measures the extent to which
a set of selected Agent AA technology components
satisfies the Agent RA specifications (functionality
and data structure). Coupling measures the number
of interactions and dependencies a given Agent AA
technology component has on other technology
components based on inputs required and outputs
provided. Cohesion is calculated as the maximum
percentage of Competency functional tasks in the
Agent RA class covered by a single Agent AA
technology among all technologies covering
Competency tasks in the class.
The results of this paper help the architect to
construct software systems that select and assemble
highly flexible agent technology components written
at different time by various developers. Specifically,
the result enables the rapid prototyping of the
complex agent-based systems by offering methods
and tools to assist architects in comparing various
agent technologies to construct and evaluate the
Agent Application Architecture.
ACKNOWLEDGEMENT
This research is sponsored in part by the Defense
Advanced Research Project Agency (DARPA)
Taskable Agent Software Kit (TASK) program,
F30602-00-2-0588. The U.S. Government is
authorized to reproduce and distribute reprints for
Governmental purposes notwithstanding any
copyright annotation thereon. The views and
conclusions herein are those of the authors and
should not be interpreted as necessarily representing
the official policies or endorsements, either
expressed or implied, of the Defense Advanced
Research Project Agency.
REFERENCES
Barber, K. S. and S. Bhattacharya, 2000. A
Representational Framework for Technology
Component Reuse. 13th International Conference on
Software & Systems Engineering and their
Applications (ICSSEA 2000), Paris, France. 285-288.
Barber, K. S. and D. N. Lam, 2001. Architecting Agents
using Core Competencies. 1
st
International Joint
Conference on Autonomous Agents and Multi-Agent
Systems (AAMAS-2002) poster, Bologna, Italy. 90-91.
Barber, K. S. and D. N. Lam, 2003. Specifying and
Analyzing Agent Architectures using the Agent
Competency Framework. 15th International
Conference in Software Engineering and Knowledge
Engineering, San Francisco Bay, USA. 232-239.
Barber, K. S., J. Ahn, et al., 2004. Agent Technology
Portfolio Manager. 16th International Conference on
Software Engineering and Knowledge Engineering,
Banff, Canada. 37-44.
Brazier, F. M. T., C. M. Jonker, et al., 2002. Principles of
Component-Based Design of Intelligent Agents. Data
Knowledge Engineering 41(1): 1-27.
Brown, A. W. e., 1996. Component-Based Software
Engineering, IEEE Computer Society Press.
Griss, M. L. and G. Pour, 2001. Accelerating Development
with Agent Components. Computer 34(5): 37-43.
Luck, M., P. McBurney, et al., 2003. Agent Technology:
Enabling Next Generation Computing (A Roadmap for
Agent Based Computing), AgentLink.
Martin, D., C. A, et al., 1999. The Open Agent
Architecture: a framework for building distributed
software systems. Applied Artificial Intelligent
13(1/2): 91-128.
ICEIS 2005 - INFORMATION SYSTEMS ANALYSIS AND SPECIFICATION
202
