
AN IMPROVED GENETIC ALGORITHM FOR SOLVING THE
VEHICLE ROUTING PROBLEM WITH TIME WINDOWS
Tao-Shen Li
School of Computer ,Electronics and Information, Guangxi University,Daxue Load 100, Nanning 530004, P. R. China
Jing-Li Wu
School of Mathematics and Computer, Guangxi Normal University, Guilin 541004, P. R. China
Keywords: Vehicle routing problem with time windows; Genetic algorithm; Crossover operator; Routing; heuristics.
Abstract: Many practical transport logistics and distribution problems can be formulated as the vehicle routing
problem with time windows (VRPTM). The objective is to design an optimal set of routes that services all
customers and satisfies the given constraints, especially the time window constraints. The complexity of
the VRPTW requires heuristic solution strategies for most real-life instances. However, the VRPTM is a
combination optimization problem and is a NP-complete problem, so we can’t get satisfying results when
we use exact approaches and normal heuristic ones. In this paper, an improved genetic algorithm to solve
the VRPTM problem is developed, which use an improved Route Crossover operator (RC’) and can meet
the needs for solving VRPTM problem. Computational experiments show that the GA based on RC’ can
obtain a general optimality for all evaluated indexes on the premise of satisfying every customer’s demand
and its performance is superior to the GA based on PMX or RC.
1 INTRODUCTION
Many practical transport logistics and distribution
problems can be formulated as the vehicle routing
problem with time windows (VRPTM) which
objective is to obtain a minimum-cost route plane
serving a set of customers with known demands.
Each customer is assign to exactly one vehicle route
and the total demand of any route must not exceed
the vehicle capacity. In addition, a time window is
associated with each customer defining an interval
wherein the customer has to be supplied. Specific
examples of VRPTM include bank deliveries, postal
deliveries and situations where the customer must
provide access, verification, or payment upon
delivery of the product or service (Solomon and
Desrosiers, 1991).
The VRPTM is a NP-complete problem (Lenstra
and Rinnooy, 1981). Due to the intrinsic difficulty of
the problem, search methods based on heuristics are
most likely applied to solve practical size problems.
Heuristic methods often obtain optimum or near
optimum solutions for large problems in rational
computing time. Therefore, during the last decades
much effort has been devoted to the development of
powerful heuristic algorithm (Savelsbergh, 1985)
(Koskosidis, et. al 1992) (Desrosiers, et. al 1992)
(Fisher, et. al 1997) (Kohl and Madsen, 1997)
(Russel, 1995).
The Genetic Algorithm (GA) is an adaptive
heuristic search method based on population genetic.
The basic concepts were primarily developed by
Holland (Holland, 1975). The practicality of using
the GA to solve complex problem is demonstrated in
(DeJong, 1980) (Grefenstette, 1986) (Goldberg,
1989). The GA tries to develop a viable solution for
an optimization problem through the successive
evolution of solutions that don’t meet a criterion. It
mimic the process of biological evolution where,
over successive generations, individuals who adapt
to the environment best live on and reproduce, while
other individuals die off (Mitchell and Forrest,
1993). Eventually, over many generations, the group
has been optimized and only individuals who adapt
to the environment mostly survive.
143
Li T. and Wu J. (2005).
AN IMPROVED GENETIC ALGORITHM FOR SOLVING THE VEHICLE ROUTING PROBLEM WITH TIME WINDOWS.
In Proceedings of the Second International Conference on e-Business and Telecommunication Networks, pages 143-149
DOI: 10.5220/0001415101430149
Copyright
c
SciTePress

Many efficient methods to use GA heuristic for
solving the VRPTM have been proposed recently
(Bräysy, 2001). Thabgiah describes a method called
GIDEON (Thangiah, et. al 1995) (Thangiah,
1995).Potvin and Bengio propose a genetic
algorithm GENEROUS that applies genetic
operators to solutions (Potvin and Gengio, 1996).
Berger et al present a approach based on the
hybridization of a GA with well-known construction
heuristics (Berger, et. al 1998). Homberger and
Gehring propose two evolutionary strategies for
solving the VRPTM (Homberger and Gehring,
1999). Bräysy presents a comprehensive sensitivity
analysis of the main components of the genetic
algorithm in the VRPTW context by proposing
several new crossover and mutation operators,
testing different forms of genetic algorithms,
selection schemes, scaling schemes, and the
significance of the initial solutions (Bräysy, 1999).
In (Bräysy, 2000), Bräysy describes a two-phase
hybrid evolutionary algorithm based on the
hybridization of a GA and an evolutionary algorithm
consisting of several local search and route
construction. Ombuki, Nakamura and Osamu
present a hybrid search based on genetic algorithms
and tabu search for vehicle routing (Ombuki, et.al
2003).
In this paper, we proposed an improved genetic
algorithm based on improved Route Crossover (RC’)
to solve the VRPTM, which ensures to satisfy every
customer’s demand. its performance is superior to
existing methods based on PMX
or Route
Crossover (RC) (Davis, 1991)
.
The remainders of this paper are organized as
follows. In Section 2, we present the mathematical
model of VRPTM. In Section 3, a heuristic method
for solving VRPTM will be developed based on the
principle of GA. The computational experiments will
be presented in Section4, and Section 5 will conclude
the paper.
2 MATHEMATICAL MODEL
The VRPTM consists of a large number of customers.
Each customer has a known demand level, which
must be supplied from a single depot. Delivery
routes for vehicles are required, start and finish at the
depot, so that all customers’ demands are satisfied
and each customer is visited just by one vehicle.
Each vehicle capacities and its maximum distance
that it can travel are given previously. A vehicle
may arrive before the beginning of the time window
and wait without cost until service is available.
However, no vehicle may arrive past the closure of a
given time interval. So the mathematical model of
the VRPTM problem is formulated as follows:
VRPTM
:
Min
()
servicenoIdtCovDis _+++
(2.1)
Dis=
∑
∑
∑
∈∈ ∈VkNiNj
ijkij
Xc
(2.2)
Cov=
∑
∈Vk
kk
Zw
(2.3)
Idt=
∑∑
∈∈VkNi
ik
IT
(2.4)
Subject to:
)5.2(VkqXd k
CiNj
ijki
∈∀≤
∑
∑
∈∈
)6.2(VkDXc k
NiNj
ijkij
∈∀≤
∑
∑
∈∈
)7.2(1 CiX
VkNj
ijk
∈∀=
∑
∑
∈∈
)8.2(1
0
VkX
Nj
jk
∈∀=
∑
∈
)9.2(,0 VkChXX
Nj
hjk
Ni
ihk
∈∀∈∀=−
∑
∑
∈∈
)10.2(1
0
VkX
Ni
ki
∈∀=
∑
∈
(
)
)11.2(,,1 VkNjisXKte
jkijkijik
∈∀∈∀≤−−+
)12.2(, VkNibsa
iiki
∈∀∈∀≤≤
}{
)13.2(,,1,0 VkNjiXZ
ijkk
∈∀∈∀∈,
1,
if the vehicle k travels directly from i to j
X
ijk
=
0,
otherwise (2.14)
1, if vehicle k is used
Z
k
=
0,
otherwise (2.15)
where
V =a set of vehicles
C =a set of geographically dispersed customers
N =C and 0 (0 denotes the central depot)
c
ij
=cost per unit amount transported from source i
to destination j
t
ij
=travel time between source i and destination j
q
k
=maximum capacity of vehicle k
D
k
=maximum travel distance permitted for
ICETE 2005 - GLOBAL COMMUNICATION INFORMATION SYSTEMS AND SERVICES
144

vehicle k
w
k
=cost of vehicle k once it is used
d
i
=demander of customer i
a
i
=earliest time allowed for delivery to customer i
(the minimum of time window)
b
i
=lastest time allowed for delivery to customer i
(the maximum of time window)
IT
ik
=waiting time of vehicle k at customer i when
it arrives before a
i
no_service =number of customers not served
s
ik
=time of vehicle k starting visiting customer i ,
s
0k
=0
e
ik
=time of vehicle k finishing visiting customer i ,
e
0k
=0
T
i
= e
ik
-s
ik
Our objective is to minimize the total distance
for each vehicle to travel, the cost used by each
vehicle, the waiting time wasted to meet the
demands of all the customers (2.1) without breaking
the constraints of vehicle capacity, travel distance
and arrival time. Thus, this problem can be treated as
a multi-objective optimization problem. A feasible
solution for the VRPTM is to serve all the customers
without vehicle exceeding its maximum capacity
(2.5) or its maximum travel distance (2.6). In
addition, each customer can be served by one and
only one vehicle (2.7). Constraints (2.8), (2.9) and
(2.10) ensure that each vehicle starts from the depot
and returns to it after finishing visit. The constraint
(2.11) ensures that vehicle k can’t arrive at
destination j before time e
ik
+t
ij
when it drives from
source i to destination j, and K is a relative large
scalar quantity. The constraint (2.12) enforces the
arrival time of a vehicle at a customer site to be
between the customers’ earliest and latest arrival
time.
3 AN IMPROVED GENETIC
ALGORITHM FOR VRPTM
3.1 General Explanation
A GA is directly derived from the behavior of genes
and chromosomes in nature. Each ‘generation’, or
family of possible solutions, is made up of a set of
strings or ‘chromosomes’. Each chromosome is in
turn made up of individual ‘genes’. These genes are
codes of designing variables that are used to
evaluate the function being optimized. The GA calls
a subroutine to compute the fitness value or
normalized objective value for each chromosome in
a population. These values are evaluated and
compared with each other. Those chromosomes
having the best values ‘survive’ and are passed on to
the next generation. In each generation, there is a
small probability for each chromosome to mutate (or
change) in one or more positions in the string (gene).
There is a different probability that two strings will
mate or crossover to produce a child. The children
and mutations are placed into the next generation.
The process of mutation, crossover, evaluation and
reproduction are repeated until it is convergent to a
suitable ‘solution’ for the problem.
In following sections, we will introduce how we
apply the genetic algorithm to the VRPTM.
3.2 Chromosome Representation
When we use the GA to solve VRPTM, designing a
kind of chromosome representation for solution
space is first problem to need solving. Here we
represent each chromosome as a sequence of a set of
vehicle route. A route is composed of a sequence of
nodes (customers). For example, the chromosome: 1
5 2 4 3 6 8 7 is composed of three routes r1: D C1
C5 C2 D and r2: D C4 C3 C6 D and r3: D C8 C7 D
(D denotes central depot, C denotes customer). The
routing scheme given in reference (Ombuki, et. al
2003) is used to transform each chromosome into a
set of routes.
3.3 Selection Operator
We use Roulette Wheel Selection to generate a new
population for the next generation. Roulette Wheel
Selection is an elite model which can ensure that the
best individual can be preserved into the next
generation.
3.4 Improved Crossover Operator
Since some customers may not be served when the
Route Crossover (RC) (Davis, 1991) is used to solve
VRPTM, we proposed the improved Route
Crossover (RC’), which is an improvement of RC. It
can optimize the problem on the premise of
satisfying every customer’s demand. RC’ operation
is presented as the following steps:
(1) Transform two parent chromosomes, P1 and
P2, into two clusters of routes by the routing scheme
mentioned above.
AN IMPROVED GENETIC ALGORITHM FOR SOLVING THE VEHICLE ROUTING PROBLEM WITH TIME
WINDOWS
145
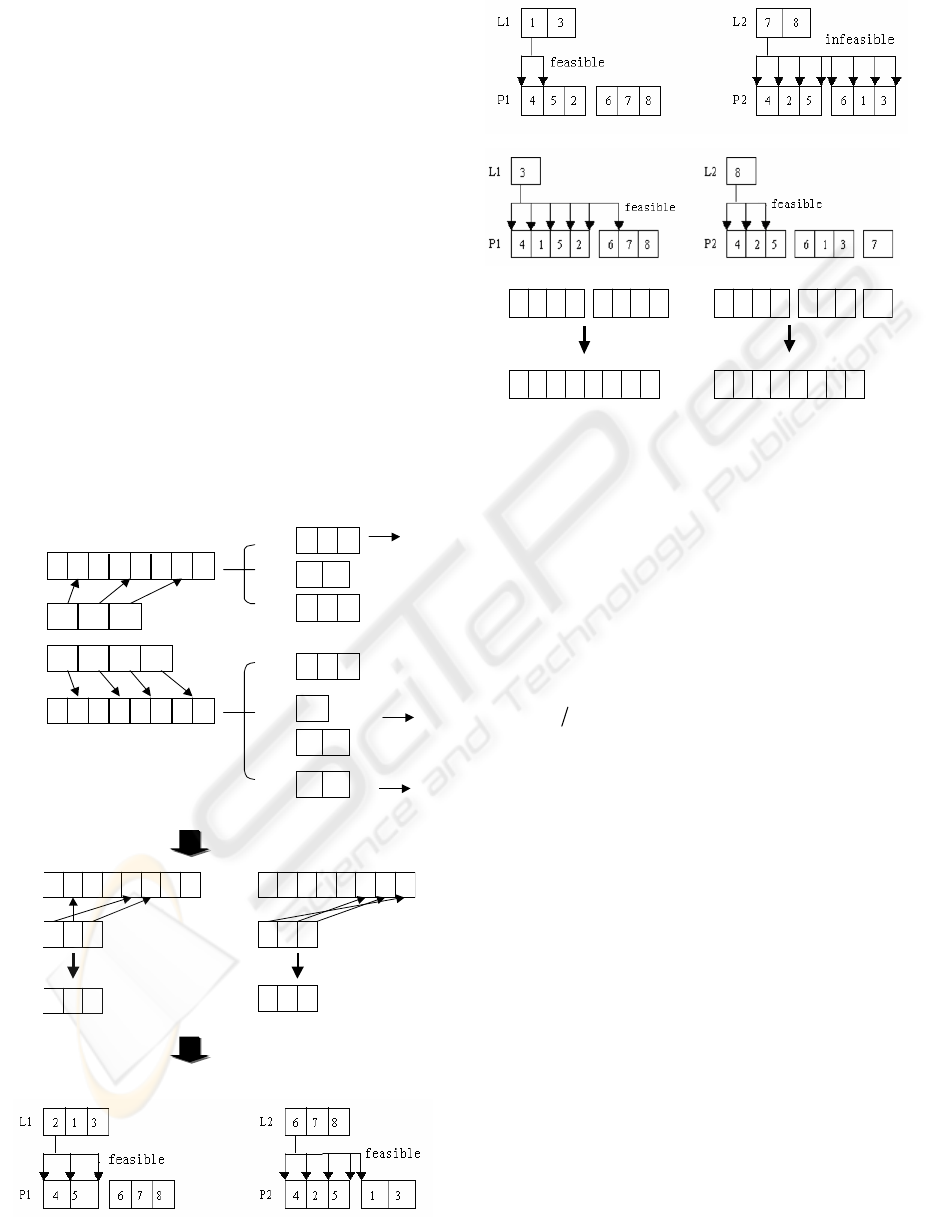
(2) A binary mask-pattern is generated
randomly for each cluster of routes, whose length is
equal to the number of the routes. One bit of the
mask pattern corresponds to one route in the cluster
of routes.
(3) Considering one parent Pi (i=1,2), the
contents of the route(s) corresponding to a “1” in the
mask pattern are copied directly to its offspring. The
customers of the routes equivalent to “0” in the mask
pattern are sorted out to form a list in the order of
the appearance in its crossing parent Pj (j=1,2, j ≠ i).
(4) Considering the list in (3), each of the
customers from the list is inserted according to their
order of appearance to the first feasible position in
the upcoming route represented by its respective
offspring. The steps above are almost the same as
RC, the only difference between the two operators is
that if a customer can’t be inserted into any existent
route, it will be declared as a non-served customer
and will not be assigned to any route in RC.
However in RC’, a new route will be generated and
the customer will be inserted into it as well.
Figure 1: Improved Route Crossover(RC’) operator
3.5 Design of the fitness function
The fitness function measures how “good” a
chromosome is, so that better chromosomes can be
selected for mating. Because each chromosome
represents a viable solution of VRPTM problem, we
need to make an estimate of the results that be
obtained after optimizing routes。In this paper, the
fitness function of an individual is as follows
:
()
servicenoIdtCovDisF _1 ⋅
μ
+⋅
γ
+⋅
β
+⋅α=
Where α,β,γ,μ are weight parameters associated with
the total traveled distance, the cost used by vehicles,
the waiting time and the number of customers not
served respectively. The weight values of the
parameters used in this function were determined
empirically and set asα=0.001, β=1.0,γ=0.001,μ=1.0.
The evaluation function is implemented after
converting each of the chromosomes into a set of
feasible routes.
4 EXPERIMENT AND ANALYSIS
The algorithm described in the previous section and
HG1 proposed in (Homberger and Gehring, 1999)
are coded in visual C++ 6.0, and executed using a
machine with Pentium 2.0G CPU.
Considering a problem with 10 customers and a
central depot, all the customers’ characteristics and
demands are given in table 1. The distances between
the central depot and the customers are given in
4 2 5 8 1 3 6 7
P2
1 2 3 4 5 6 7 8
P1
1 2 3 L1 8 6 7 L2
2 1 3 L1
Sort
6 7 8
L2
Sort
P2P1
4 1 5
2
6 3 7 8 6 1 3 7 4 2 8 5
C1 4 1 5 2 6 3 7 8 C2 4 2 8 5 6 1 3
7
1 2 3 4 5 6 7 8
P1
4 2 5 8 1 3 6 7
P2
M1 0 1 1
M2 1 0 1 0
1 2 3
P1
1
L1
4 5
6 7 8
P1
2
P1
3
L2
P2
1
4 2 5
P2
2
8
P2
3
P2
4
1 3
6 7
L2
ICETE 2005 - GLOBAL COMMUNICATION INFORMATION SYSTEMS AND SERVICES
146
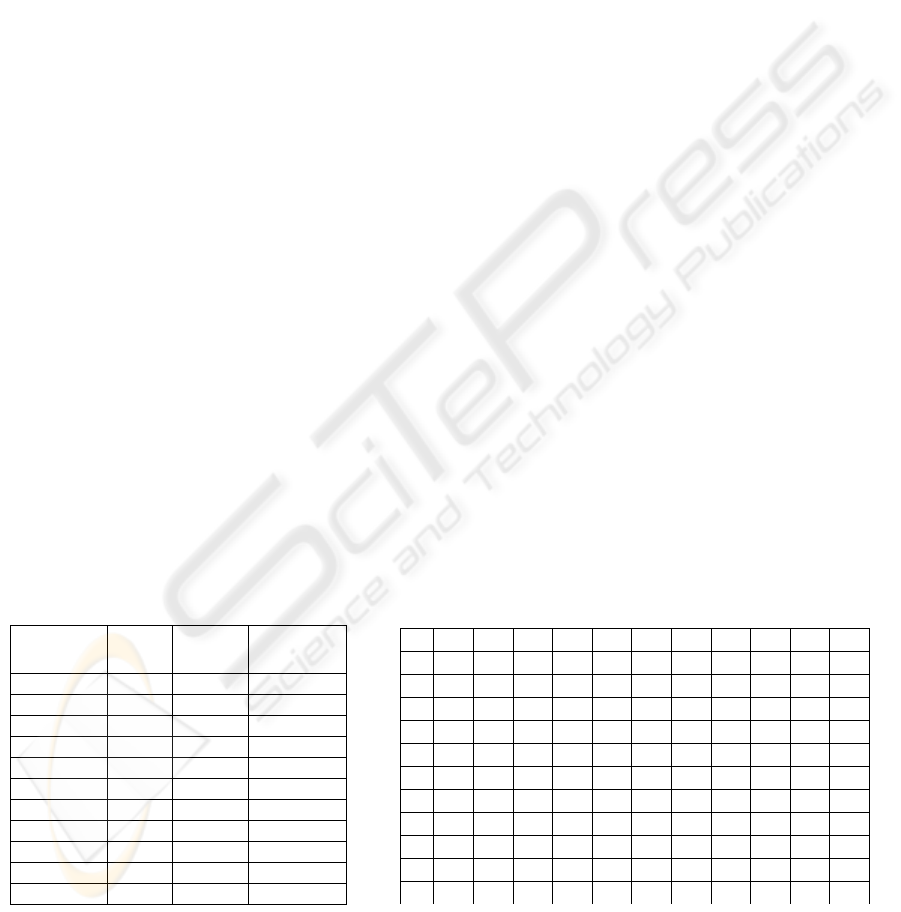
table 2. Assuming a vehicle’s capacity is 8 tons and
speed is 50km/h, then the travel time from source i
to destination j is d
ij
/50(h), and the travel cost
between them is assumed as d
ij
. In first line of table
1, zero(i=0) represents the central depot, a
0
represents the earliest time to move away from
central depot, b
0
represents last time restriction to
return central depot.
We apply the improved genetic algorithm based
on RC’ and HG1 to solve the above problem, the
population size is set at 20, dynamic crossover
probability is used. After 100 generations, 3 vehicle
routes are needed in all:
Our algorithm:
first vehicle route: 0→4→10→7→0
second vehicle route: 0→6→2→3→0
third vehicle route: 0→9→5→1→8→0
total distance: 437.0 (km)
HG1:
first vehicle route: 0→2→10→0
second vehicle route: 0→9→5→1→8→0
third vehicle route: 0→6→7→4→3→0
total distance: 734.0 (km)
Considering all the customers’ characteristics and
demands are given in table 3, distance and other
situation is kept constant. After 100 generations, the
experimental results of our algorithm and HG1 are
same. 5 vehicle routes are needed in all:
first vehicle route: 0→5→2→3→0
second vehicle route: 0→6→8→0
third vehicle route: 0→4→9→0
fourth vehicle route: 0→1→7→0
fifth vehicle route: 0→10→0
total distance: 658.0 (km)
As can seen from results above, the improved
genetic algorithm based on RC’ was better than HG1
in some situation.
Apparently, this is a feasible solution to this
problem, which satisfies both the constraints and
every customer’s demand. We also implement the
genetic algorithm based on RC for the same problem.
Though we still need 3 vehicles, customer 2 never
gets service. It indicates that RC’ operator is
superior to RC. In addition, under the same
circumstance, we traced the processes of the GAs
based on PMX, RC and RC’ respectively and found
that the best fitness and average fitness of RC’ were
better than those of PMX and RC, the results are
illustrated in Fig.2 and Fig.3. Considering two kinds
of population size of the problems, the results of
advanced experiment show that RC’ is still superior
to PMX and RC in other performances, which is
given in table 4.
first vehicle route: 0→4→10→7→0
second vehicle route: 0→6→8→3→0
third vehicle route: 0→9→5→1→0
Table 1: Customers’ Characteristics and Demands Table 2: Distances between the central depot and the customers (km)
Customer
i
D
i(ton)
T
i
(hour)
[a
i
,b
i
]
(time)
0 0 0 [0,100]
1 3 2 [1.52,7]
2 4 2 [1.78,7]
3 3 1 [1.78,14]
4 3 1 [0.28,15]
5 2 2 [2.6,13]
6 1 2 [0.78,3]
7 1 2 [3.6,6]
8 3 2 [3.7,11]
9 1 2 [1.36,5]
10 4 1 [0.6,13]
d
ij
0 1 2 3 4 5 6 7 8 9 10
0 0 76 89 89 14 130 39 180 185 68 30
1 157 0 82 176 35 113 142 80 105 94 137
2 185 140 0 40 178 138 180 66 171 126 18
3 1 200 43 0 83 129 142 43 196 66 107
4 190 121 85 120 0 15 159 182 34 65 1
5 128 2 1 46 103 0 142 31 75 45 28
6 141 117 16 16 170 30 0 45 29 150 193
7 1 14 194 80 85 85 164 0 60 187 4
8 85 6 48 152 107 79 4 82 0 113 91
9 21 30 80 127 53 31 32 110 49 0 185
10 46 162 123 14 87 35 132 34 10 106 0
AN IMPROVED GENETIC ALGORITHM FOR SOLVING THE VEHICLE ROUTING PROBLEM WITH TIME
WINDOWS
147
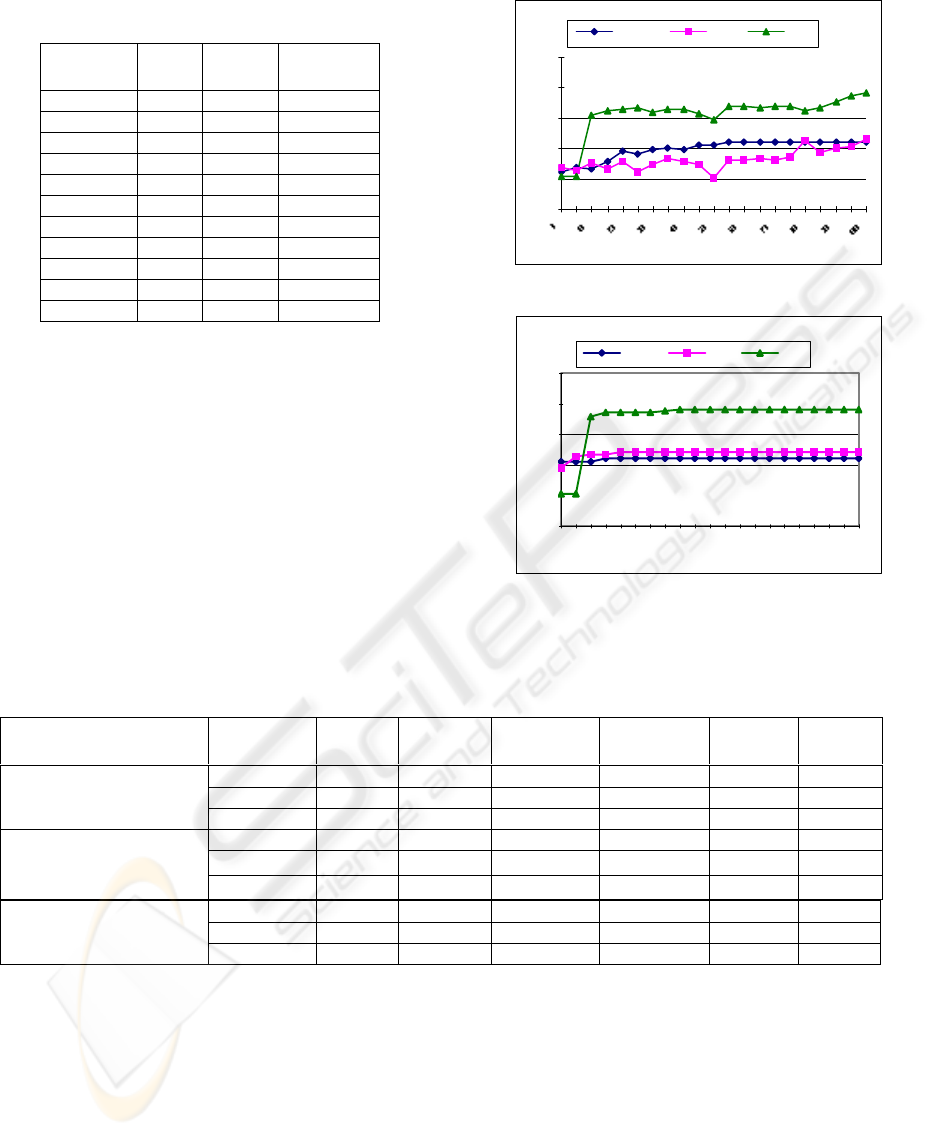
Table 3: Customers’ Characteristics and Demands
0,1
0,15
0,2
0,25
0,3
0,35
generatioin
average fitness
PMX RC RC'
Figure 2: Comparing average
0,1
0,15
0,2
0,25
0,3
0,35
0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100
generation
best fitness
PMX RC RC'
Figure 3: Comparing the best fitness
Table 4: Comparing the searching results using methods based on PMX, RC, RC’ respectively
5 CONCLUSION
Based on genetic algorithm, we constructed an
improved genetic algorithm using RC’ operator to
solve VRPTM problem. Experimental results show
that with the increasing size of a problem, this
algorithm can obtain general optimality for all
evaluated indexes on the premise of satisfying every
customer’s demand and its performance outperforms
PMX and RC. Compared with HG1, its performance
and speed are more effective.
Customer
i
D
i(ton)
T
i
(hour)
[a
i
,b
i
]
(time)
0 0 0 [0,100]
1 3 2 [1.52,7]
2 4 2 [1.78,7]
3 3 1 [1.78,14]
4 3 1 [0.28,15]
5 2 2 [2.6,13]
6 1 2 [0.78,3]
7 1 2 [3.6,6]
8 3 2 [3.7,11]
9 1 2 [1.36,5]
10 4 1 [0.6,13]
PMX 0.019266 0.018823 10903.0 41 2.940 0
RC 0.022225 0.022081 9994.0 32 0.60 3
100
(70,200)
RC′ 0.034420 0.032051 7051.0 22 2.280 0
Problem size (population
size,generation)
crossover
operator
best
fitness
average
fitness
distance
number of
cars
sparing
time
no_
service
PMX 0.211238 0.211238 734.0 4 0.00 0
RC 0.220753 0.215167 529.0 3 0.96 1
10
(20,100)
RC′ 0.290899 0.290899 437.0 3 0.620 0
PMX 0.043584 0.043584 4944.0 18 0.30 0
RC 0.049735 0.049735 5104.0 15 2.50 0
50
(100,200)
RC′ 0.086816 0.086268 2518.0 9 0.660 0
ICETE 2005 - GLOBAL COMMUNICATION INFORMATION SYSTEMS AND SERVICES
148

REFERENCES
Ombuki, B. Nakamura, M. and Osamu, M., 2002 A
Hybrid search based on genetic algorithms and tabu
search for vehicle routing. In the 6th IASTED
International Conference on Artificial Intelligence and
Soft Computing, 176-181.
Davis L., 1991, Handbook of genetic algorithms. Van
Nostrand Reinhold.
Solomon, M. M., and Desrosiers, J., 1988, Time window
constrained routing and scheduling problem.
Transportation Science, 22(1):1--13
Lenstra, J. K., and Rinnooy Kan A. H. G., 1981,
Complexity of vehicle routing and scheduling
problems, Networks, 11,221—262.
Savelsbergh M.W.P., 1985, Local search for routing
problems with time windows. Annals of Operations
Research 4, 285-30.
Koskosidis, Yiannis, Warren B. Powell and Marius M.
Solomon, 1992, An optimization based heuristic for
vehicle routing and scheduling with time window
Constraints. Transportation Science, 26(2), 69-85
Desrosiers M. Desrosiers J.. Solomon M. M.,1992, A new
optimization algorithm for the vehicle routing problem
with time windows, Operation Research, 40,342--354
Fisher M. L., Jornsten K. O., and Madsen O. B. G.,1997,
Vehicle routing with time windows: two optimization
algorithm, Operation Research, 45,488--492
Kohl N., Madsen O.B.G., 1997, A optimization algorithm
for the vehicle routing problem with time windows
based on Lagrangian Relaxation, Operation Research,
40,342--354
Russel R. A., 1995, Hybrid heuristics for the vehicle
routing problem with time windows, Transportation
Science, 29(2):156—166
Holland J. H., 1975, Adaptation in natural and artificial
systems. University of Michigan Press, Ann Arbor.
DeJong, 1980, Adaptive system design: a genetic
approach, IEEE Transaction on Systems, Man and
Cybernetics,10(9):566--574
Grefenstette J. J., 1986, Optimization of control parameter
for genetic algorithms, IEEE Transactions on Systems,
Man and Cybernetics,16(1):122--128
Goldberg D., 1989, Genetic Algorithm in Search,
Optimization, and Machine Learning, Addison Wesley
Publishing Company Inc. New York
Mitchell M. and Forrest S.1993, Genetic Algorithms and
Artificial Life. [Online document],: http://
ww.santafe.edu/~mm/GA.Alife.ps
Bräysy O.2001 , Genetic Algorithms for the Vehicle
Routing Problem with Time Widows, Internal Report
STF42 A01021, SINTEF Applied Mathematics,
Department of Optimisation, Norway.
Thangiah, S.R., I.H. Osman, R. Vinayagamoorthy and T.
Sun,1995, Algorithms for the Vehicle Routing
Problems with Time Deadlines, American Journal of
Mathematical and Management Sciences, 13,
323−355.
Thangiah, S. R., 1995, Vehicle routing with time windows
using genetic algorithms, in Application Handbook of
Genetic Algorithms: New Frontiers, Volume II, L.
Chambers (ed), 253−277, CRC Press
Potvin J. Y. and Gengio S., 1996,The vehicle routing
problem with time windows part II: genetic search.
INFORMS Journal on Computing, 8(2):165—172
Berger J., Salois M. and Begin R., 1998,A hybrid genetic
algorithm for the vehicle routing problem with time
windows. In Proceedings of the 12th Bienneal
Conference of the Canadian Society for
Computational Studies of Intelligence, Sringer-Verlag,
114--127
Homberger J. and Gehring H.,1999,Two evolutionary
meta-heuristics for the for the vehicle routing problem
with time windows, INFORMS Journal on Computing,
37(3):297--318
Bräysy, O. 1999, A new algorithm for the vehicle routing
problem with time windows based on the
hybridization of a genetic algorithm and routing
construction heuristics. In Proceedings of the
University of Vaasa, Research papers 227,
Bräysy, O., Berger J. and Barkaoui M.,2000, A new hybrid
evolutionary algorithm for the vehicle routing problem
with time windows, Presented at the Route
2000-Workshop, Skodsborg, Denmark
Table 4. Comparing the searching results using methods
based on PMX, RC, RC’ respectively
AN IMPROVED GENETIC ALGORITHM FOR SOLVING THE VEHICLE ROUTING PROBLEM WITH TIME
WINDOWS
149
