
Modifying Neuro Evolution For Mobile Robotic
Behavior Development
Sekou Remy and Ashraf Saad
School of Electrical and Computer Engineering,Georgia Institute of Technology,
Savannah, GA 31407, USA
Abstract. This work examines the effect of two modifications of typical ap-
proaches to evolving neuro controllers for robotic behaviors. First evolutionary
methods were constrained to modify only one element of the population, the only
element to be evaluated in the robot. Secondly the algorithm was allowed to incor-
porate genotypes provided by external sources. These modifications were evalu-
ated through the use of a mobile robot simulator. Each was allowed to evolve in an
arena that allowed it to interact with other robots. Experiments were conducted to
investigate the effect of sharing genotypes and their corresponding fitness among
homogeneous robots - the robots differed only in the initial random phenotype.
The experiments showed that the ability to incorporate successful genotypes from
others increased the rate at which evolution progressed. Communication of good
genotypes allowed behaviors to get fitter faster, and made small initial population
sizes feasible.
1 Introduction
Autonomous mobile robots have long been desired by the research community. The
benefits of interaction between a robot and other external, possibly human, agents has
been displayed for instance, see [5]. The ability to communicate has been shown to pro-
vide great advantages for teams of robots. [3] and [19], among others have highlighted
cases where communication assisted teams of robots in accomplishing given tasks. It
is not too far of a stretch to fathom that the sharing of knowledge or information can
also assist individual robots in a team to learn to follow a wall or execute some other
individually oriented task.
Communication, while a useful component, does not provide autonomy, in any de-
gree by itself. A necessary and sufficient skill is the ability to decide what to do. The
ability of a mobile robot to make decisions is implicitly based on the premise that there
are choices, two or more options that can be selected, each with different merit.
Most work in robotics assumes that there is a preexisting set of choices to choose
from and a preexisting set of algorithms to make these choices. These assumptions are
by no means oversimplifications of the challenges of robotics tasks; e.g., path planning,
but in they do however produce brittle robots [12] that do not adapt to or take into con-
sideration changes in their environments or changes within themselves. If the robot’s
creators are able to identify every possible situation that the robot will encounter and
Remy S. and Saad A. (2005).
Modifying Neuro Evolution For Mobile Robotic Behavior Development.
In Proceedings of the 1st International Workshop on Multi-Agent Robotic Systems, pages 155-164
DOI: 10.5220/0001192901550164
Copyright
c
SciTePress

devise solutions for each of these, then brittleness would not be an issue worth mention-
ing. But if the robot exists in a dynamic, unknown, or unpredictable environment, has
noisy actuators, or sensors that produce noisy measurements, then adaptation and learn-
ing are qualities that are necessary to allow the robot to perform despite the presence of
challenging limitations.
It must be stated that autonomous decision making is closely linked to the desired
outcome or goal of the robot’s operation. Not only is it important to know the choices,
the effects of choices, and how to select between choices; it is also important to know
the desired goal or outcome as well. When dealing with mobile robotics it is helpful to
borrow a page from [1]; the choices that are to be made are choices between different
behaviors that the robot can manifest.
The ability to learn two-dimensionally, that is to learn how to execute a particular
behavior, as well as to learn when to choose to execute that behavior, allows a robot
to act autonomously in the face of dynamic environments, sensors, and actuators. This
work investigates enhancements to one approach to learning behaviors, the neuro con-
troller.
2 On Evolving a Neuro Controller
2.1 What is a Neuro Controller?
This research seeks to evolve a neuro controller that allows the robot to display a desired
behavior, in this case the wall following behavior. A neuro controller is an Artificial
Neural Network (ANN) structure similar to that shown in figure 3, that connects neurons
in such a manner that when the correct weights and biases are selected the controller
produces the desired output from its inputs.
2.2 What is a Genetic Algorithm?
Genetic algorithms (GAs) are often viewed as function optimizers [20]. They are also
heralded as tools that can provide robust and powerful adaptive search mechanisms
[16]. These two seemingly disparate definitions are two sides of the same coin. GAs
are a family of computational models that are loosely based on Darwinian evolution.
GA implementations begin with a typically random population of potential solutions,
and through a process of mutation and crossover, create new potential solutions. Each
solution is evaluated and given a fitness value, which is a measure of how well that solu-
tion scored. As the algorithm is executed, the population as a whole evolves becoming
fitter; the search for the fittest element becomes the selection of the fittest element in
the final population. The fittest element is also the solution that optimizes the fitness
function. GAs have been applied to many types of problems including some attempts
for the evolution of neuro controllers [2,4,7].
2.3 Why Evolve the Solution?
The weights and biases are typically derived through some training method. Most train-
ing algorithms are based on a gradient descent method. Because of this they can get

trapped in a local minimum and sometimes, as in the case of multi modal or non dif-
ferentiable error functions, these methods are incapable of finding the global minimum
[21]. Since the GA is not crippled by such, it can be applied to determine the weights.
3 Modifications
3.1 Change 1
This work proposes the modification of the family of GAs that allows a single genotype
to be actively evolved. This genotype will always be selected as one of the parents for
the crossover operation and one of its offspring selected to replace it. This genotype
will also be the subject of mutation and any other single parent evolutionary technique.
This modification was developed for application to neuro controller evolution but can
be applied to domains with similar needs such as ANN classifiers [13,10].
3.2 Motivation
Traditional GA approaches employ random selection of the solutions used in the processes
that evolve the population. This creates a problem since the GA changes a population
in a random manner as generations evolve. There is no way to monitor a solution’s
progress over generations. This is relevant because each solution is directly mapped to
a phenotype that creates a neuro controller. Traditional approaches essentially evaluate
random attempts at creating the best controller. While this may work well for appli-
cations that are abstract in nature, when applied to a real robot it is problematic since
the changes can have catastrophic consequences especially when the robot is interact-
ing with external, possibly human agents. We believe that a better approach would be
to continuously modify an existing behavior in the search of better performance. This
approach does allow less variation but it reduces the possibly negative effects of uneval-
uated genotypes.
3.3 Change 2
This work also proposes a method that allows genotypes to be added to a population
from an external source.
3.4 Motivation
If the GA is able to incorporate other genotypes that are very fit, the population will get
fitter faster as the search is no longer completely random. Moreover, if multiple GAs
use the same fitness function to evaluate genotypes and are operating over the same
solution space then the search should be faster since they are operating in parallel and
sharing the successes, in the form of high fitness genotypes that they encounter.

4 Experimental Setup
4.1 The Behavior
In our experiments, robots are expected to learn the wall following behavior. This means
that upon completion of a learning period that the robot will be able to traverse the
outline of the arena without bumping into avoidable objects or getting trapped in corners
or other features of the arena. The expected path of the robot neither has a preference
for clockwise nor counter clockwise direction since both are acceptable in this case.
4.2 The Robot
This work was based on the capabilities of the Khepera robot. This robot was selected
because it was easy to interface with and did not possess any highly specialized sensors
or actuators. The devices found on this robot are common to many other mobile robots.
For this work eight proximity sensors, two actuator motors, and the communication
turret were used. The orientation of these sensors is shown in figure 1.
To learn to follow a wall, the robot will have to develop a mapping between the
proximity sensors readings and the actuator values. The mapping should have the effect
of allowing the robot to perform actions such as turn away from obstacles or drive for-
ward if there is no obstacle. The robot will have no cognitive layer so there is no stored
representation of the world or walls for example, but the behavior will be displayed in a
reactive manner based on the mapping from proximity sensors to left and right actuator
motors.
4.3 The Implementation Environment
The experiment was conducted completely using MatLab. The neural network was pro-
vided using the built in MatLab toolbox and the evolutionary algorithm was a modified
version of the GAOT toolbox [9]. Each robot operated in an arena that was populated by
other robots with which it could communicated, sharing genotype and fitness informa-
tion if permitted. A snapshot of one such arena is shown in figure 2. The simulator used
was the KIKS simulator [18]. The arena and each robot in it were generated by individ-
ual instances of a KIKS simulator. In this work, each of these instances was initiated on
a single computer, Pentium II class or newer, that had at least 128MB of RAM.
4.4 Communication
The simulated robots communicated with each other using a simulated wireless commu-
nications channel. This capability mirrors those afforded to the real Khepera robot by its
communication turret, complete with bandwidth limitations, interference and message
segmentation and reassembly.
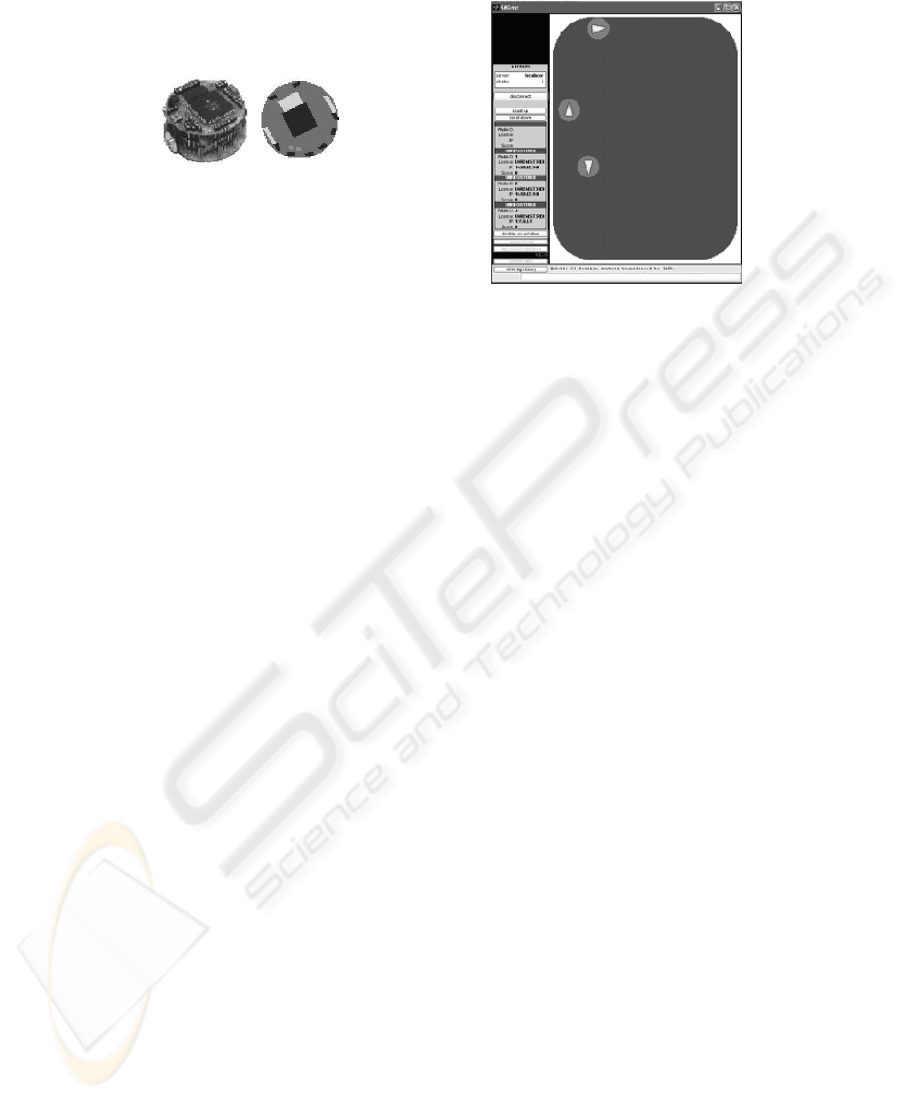
Fig.1. On the left an image of the Khepera
robot base, on the right a sketch of the same
showing wheels sensors and turrets
Fig.2. An arena with three robots
5 Implementation
5.1 The infrastructure
The genetic operations of selection, mutation and combination operated on the geno-
type. When the genotype’s fitness was to be determined, it was decoded into a pheno-
type - an instantiation of a neurocontroller - that was evaluated in the robot. During
the process of evaluation, the robot interacted with its environment. The robot’s motion
was controlled only by the phenotype provided to it. If the robot was permitted to do
so it collected genotypes that were transmitted to it. When evaluation was complete it
returned these along with the current genotype which then sported an updated fitness
value. The following sections discuss attributes of these components in closer detail.
5.2 The Neuro Controller
The input layer of the neuro controller contained eight input nodes, one node per sensor,
while the output layer contained two such nodes, one for each motor. There were five
nodes in the hidden layer. These nodes are connected first by forty synapses from input
to hidden layer, and then ten from hidden to output layers. These numbers result from a
design choice that fixed the number of hidden nodes, hence constrained the structure of
the neural network that served as the neuro controller. The network was fully connected
and did not utilize a bias value. The neuro controller being evaluated at any given time
is the current phenotype. Each of the input nodes was connected to a sonar sensor and
the output nodes to the actuators, one to the left and the other to the right motor.
5.3 The GA Parameters
The genotype was comprised of a vector of signed real numbered elements, one for each
synapse weight and, one extra for the fitness of that genotype. The initial populations
were comprised of randomly generated genotypes. The GA used a value of 1e-6 for
epsilon, the resolution and a normal geometric selection function with parameter p =
0.08. All other parameters are included in tables 1 and 2
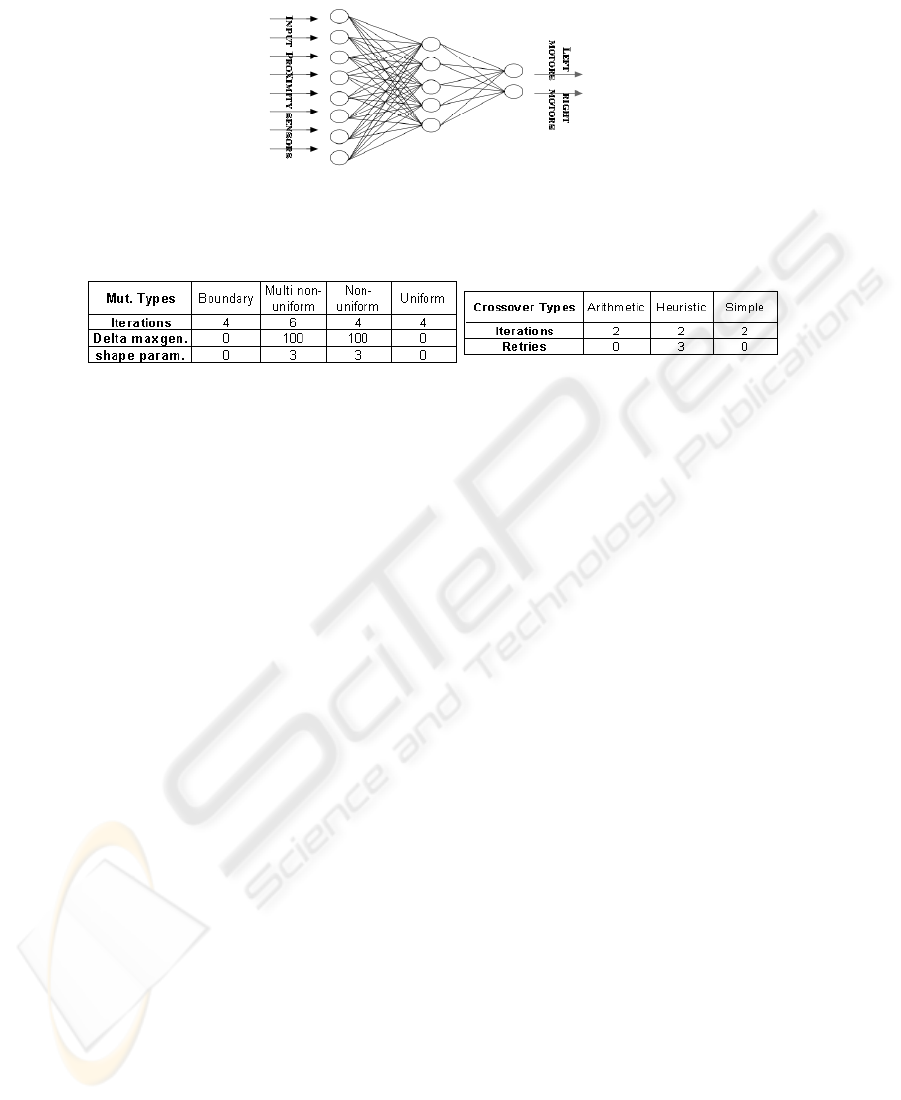
Fig.3. The neurocontroller
Table 1. Mutation parameters
Table 2. Crossover parameters
5.4 The Fitness Function
The fitness function for this application was devised such that the robot would be re-
warded for having one of its sides close to the wall without touching the wall, and for
having no obstacle in front of it. Close was defined as a sonar sensor reading between
seven hundred and nine hundred and ninety nine units. The reward was applied when
the side closest to an obstacle was within these prescribed bounds. There was also a
bonus reward applied for robots that displayed more forward motion than backward
motion. If the sonar abutted an object, the sensor would produce a reading very near to
1024. The aim was not to collide with objects, so sonar values larger than 999 were not
given a reward. We do not claim that this is the perfect fitness function. However, this
one has been demonstrated via trial and error, to perform well for this application, and
hence was selected. There is much that can be said about the “art of selecting a fitness
function” please refer to the work of [6,15, 11, 8] for further discussion of this issue.
5.5 The Experiment
Twelve arenas of three robots each were set up. The robots in each arena exercised the
same communication strategy and had the same maximum generation size for the GAs.
These experiments were run for generation sizes increasing from ten to thirty, and also
with and without the aid of communicated data. When communication was not allowed,
the data was transmitted and then destroyed by the reciever upon reciept, so each arena
and robot had the same communications load.
6 Results
A cursory glance at figure 4 may lead one to surmise that the modifications did not
produce good results. Closer inspection shows that this is not the case. Table 3 shows
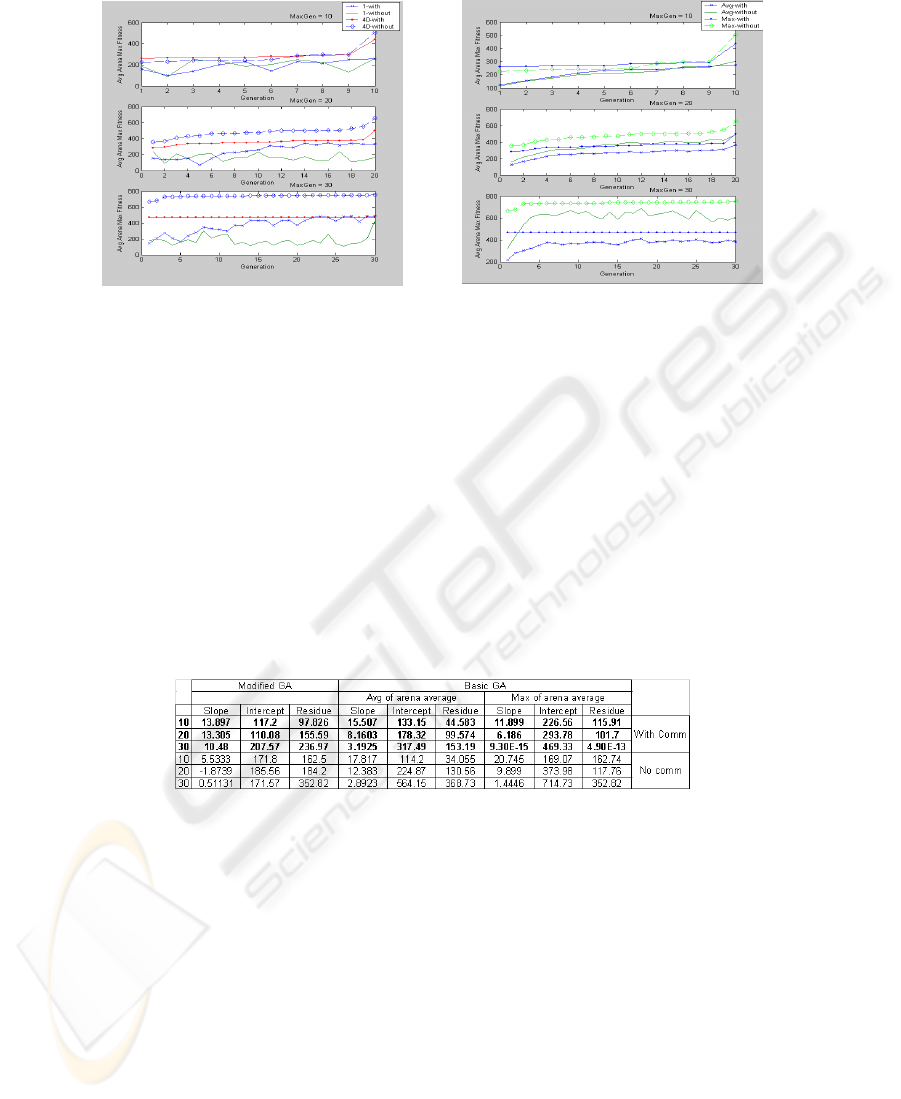
Fig.4. Avg. arena fitness vs. generation size of
robots w/ & w/o the benefit of communication
Fig.5. Avg. arena fitness & max. arena fit-
nesses vs. generation size using basic GA
the slope, intercept and residue of the trend lines of the graphs. The emboldened num-
bers indicate the use of data communicated from other robots. The apparently excellent
performance of the unchanged evolved neuro controller seems to be a result of good
initial populations, which are randomly generated. The rate of improvement, which is
captured by the slope value, is consistent in all cases that change #1 was not made or
both modifications were made.
Table 3. Slope, intercept and residue data for trend lines of graphs in Figures 4 and 5
There was definitely a benefit to communication in the cases where the initial pop-
ulation size was one. This benefit disappeared when the population size was increased
to forty. Figure 4 shows data for the average maximum arena fitness of the populations
as a function of generation. Figure 5 shows this data and the average of the average
arena fitnesses, giving a better view of the increasing fitness of all the members of the
population over generations.
Figure 6 shows the paths of two different robots. The panel on top shows a robot
with a high fitness, and the one below it, a robot with a low fitness value. These images
give a sense of how the fitness function can relate to demonstrated behavior.
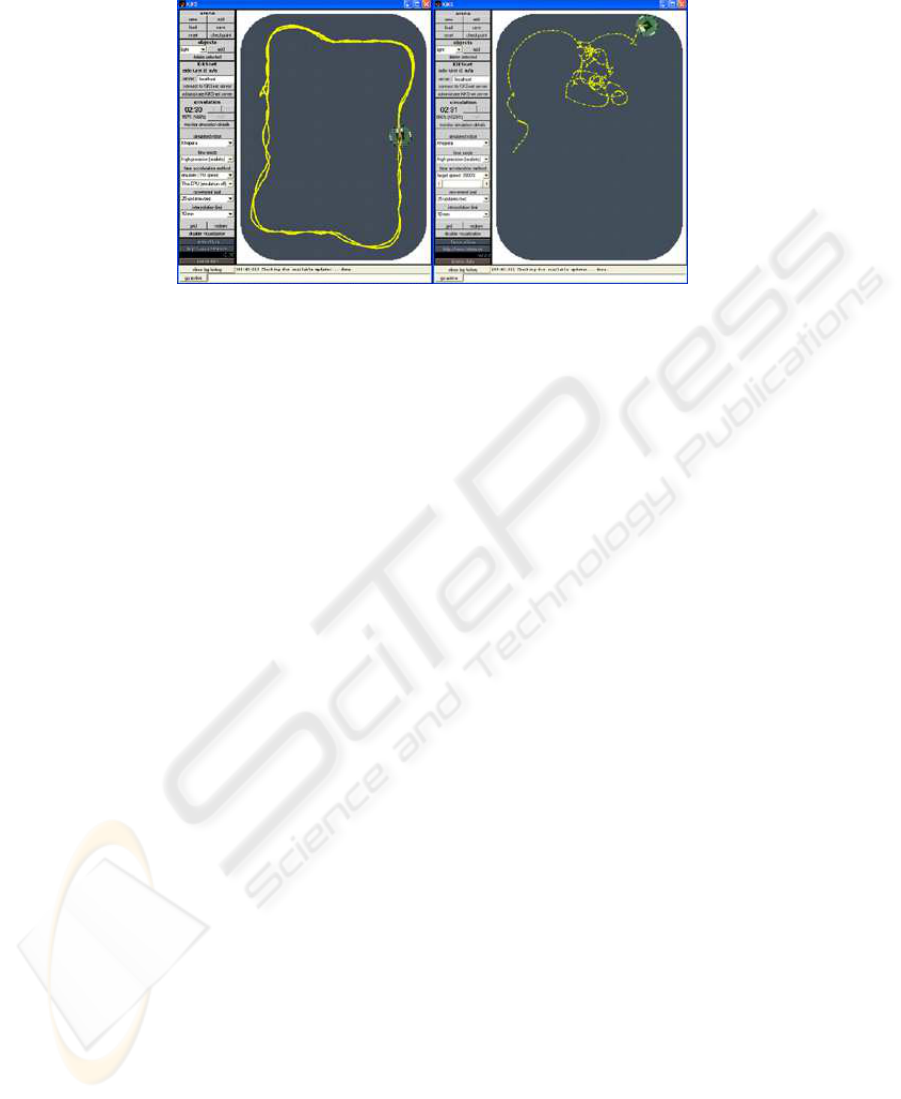
Fig.6. Paths of two robots with displaying neurocontrollers of different fitnesses
7 Future Work
These experiments while quite promising were very time consuming. There were time
gains that are yet to be fully investigated in the data sharing cases, but these experiments
were completed on the order tens of hours; the longest taking just over thirty hours. Such
long durations seem to be consistent when neuro controllers are evolved, and they make
large numbers of experiments prohibitive. Future work will include an implementation
of this work with fast genetic algorithms. Still on the challenges of genetic algorithms,
the advances made using subpopulations could be incorporated into future work. Neuro
Evolution of Augmenting Topologies [17] is also a promising research avenue.
A homogeneous set of robots were used for this research. The robots were identical
in their sensor and actuator collection as well as in their phenotype structures. Interest-
ing opportunities lie ahead for investigating non-homogeneous cases. This would hint
at the realm of interspecies communication and learning.
Close to the core of this work many potential modifications of interest remain.
Only weights of the neuro controller were evolved, the structure could have also been
evolved, perhaps even in concert with the weights [14]. The size of the arenas and the
number of robots operating in those arenas are also parameters of interest.
8 Conclusion
In robotic applications that evolve neuro controllers for robot motion, evaluation of
genotypes mean that the robot’s operation either has to be simulated or actually exe-
cuted. Since in many cases it is not feasible to simulate, actual operation is often neces-
sary. Testing unevaluated geneotypes in a mobile robots is akin to testing experimental
planes. There is a great deal of uncertainty, but each test provides great rewards, even in
failure. Reducing risk is an important goal in both of these efforts and we believe that
making changes to only one genotype allows the mobile robot do so. The risk reduc-
tion results because the robot should demonstrate greater consistency at each evaluation
since it is likely that most of that genotype remained unchanged.

As those familiar with statistics would expect, reducing the initial population size
of a traditional GA to one produced poor results. This work shows that this setback is
mitigated by endowing the GA with the ability to share and incorporate some infor-
mation about genotypes with other independent GAs operating on identical genotype
structures and fitness functions. Thus the modifications suggested in this work can be
used to address these pitfalls.
Also, since each robot can be initialized with a single genotype, it can be seen that it
would be easy to begin the neuro evolution process with a genotype that was the result
of prior evolution. This allows a robot to receive a jumpstart. The evolution process does
not have to begin randomly, nor does it have to wait until the end of a generation. This
is the quality that allows these modifications to display the characteristic of knowledge
transfer across lifetimes. This also opens the door for an external agent to interact with
a robot’s neurocontroller, and to do so at any time.
Learning is a paradigm that is manifested in individuals over their lifetimes. Genetic
algorithms function as a proxy for learning since they are manifested by populations
over generations; they do this essentially by searching through a solution space. This
work modifies the GA so that it more closely imitates learning.
We have shown the benefit of teams of robots sharing information in accomplish-
ing a common task, that of behavior development. The research was performed using a
simulated robot. The code used to implement it can be used directly on a real Khepera
robot without functional modification. The simulator used was firmly grounded in re-
ality, mimicking many of the challenges that real robots face, such as sensor noise and
wheel slippage. This is of import since it can then be expected that these results will
hold for a real robot as well. Plans are underway to do so.
Despite the promising results and the potential for future work, there are still some
major limitations of this line of research that have not been fully acknowledged by other
researchers. Foremost the robot, despite all its evolutionary capability, is still an object
of reaction. It has not yet been granted the ability to deliberate or even remember. It
acts based on sensor values and were any of those values to be severely flawed the ro-
bot would no longer display the desired behavior. Furthermore, while this work places
no limitation on the number of behaviors that could be evolved, there is no infrastruc-
ture to control when those behaviors are displayed. [12] has done work to use GAs to
address this issue with the evolution of behavioral policies. This is of interest and will
be investigated to see if this or other methods of deliberation and decision making are
appropriate. These are the issues for autonomous robotics; neuro evolution of behaviors
is but a tool in a robotician’s toolbox.
References
1. Arkin, R. (1998). Behavior-Based Robotics. MIT Press, Cambridge.
2. Balakrishnan, K. and Honavar, V. (1996). Analysis of neurocontrollers designed by simu-
lated evolution. In Proc. of the IEEE International Conf. on Neural Networks.
3. Billard, A. and Dautenhahn, K. (2000). Experiments in social robotics: grounding and use
of communication in autonomous agents. In Adaptive Behaviour, volume 7.
4. Cliff, D., Husbands, P., and Harvey, I. (1993). Analysis of evolved sensory-motor controllers.
In Proc. of the Second European Conf. on Artificial Life.

5. Connell, J. and Viola, P. (1990). Cooperative control of a semi-autonomous mobile robot. In
Proc. of the 1990 IEEE International Conf. on Robotics and Automation.
6. Duvivier, D., Preux, P., C.Fonlupt, Robilliard, D., and Talbi, E.-G. (1998). The fitness func-
tion and its impact on local search methods. In Proc. of the IEEE International Conf. on
Systems, Man, and Cybernetics, volume 3.
7. Floreano, D. and Mondada, F. (1994). Automatic creation of an autonomous agent: Genetic
evolution of a neural-network driven robot. In From Animals to Animats 3: Proc. of the Third
International Conf. on Simulation of Adaptive Behavior.
8. Hoque, T., Chetty, M., and Dooley, L. (2004). An efficient algorithm for computing the
fitness function of a hydrophobic-hydrophilic model. In Proc. of the IEEE International
Conf. on Evolutionary Computation, volume 1.
9. Houck, C., Joines, J., and Kay, M. (1995). A Genetic Algorithm for Function Optimization:
A Matlab Implementation. NCSU-IE TR 95-09.
10. Lippmann, R. P. (1989). Pattern classification using neural networks. In IEEE Communica-
tions Magazine.
11. Maher, M. and Poon, J. (1995). Co-evolution of the fitness function and design solution for
design exploration. In Proc. of the IEEE International Conf. on Evolutionary Computation,
volume 1.
12. Nehmzow, U. (2002). Physically embedded genetic algorithm learning in multi-robot sce-
narios: The pega algorithm. In Proc. of the Second International Workshop on Epigenetic
Robotics: Modeling Cognitive Development in Robotic Systems, volume 94, Lund, Sweden.
Lund University Cognitive Studies.
13. Ripley, B. D. (1994). Flexible non-linear approaches to classification. In Cherkassky, V.,
Friedman, J. H., and Wechsler, H., editors, From Statistics to Neural Networks. Theory and
Pattern Recognition Applications, Berlin. Springer Verlag.
14. Saxena, A. and Saad, A. (2004). Genetic algorithms for ann-based condition monitoring
system design for rotating mechanical systems. In 9th Online World Conf. on Soft Computing
in Industrial Applications.
15. Sorokin, S. N., Savelyev, V. V., Ivanchenko, E. V., and Oleynik, M. P. (2002). Fitness func-
tion calculation technique in yagi-uda antennas evolutionary design. In Proc. of the IEEE
International Conf. on Mathematical Methods in Electromagnetic Theory, volume 2.
16. Spears, W. M., DeJong, K. A., Baeck, T., Fogel, D. B., and deGaris, H. (1993). An overview
of evolutionary computation. In Proc. of the 1993 European Conf. on Machine Learning.
17. Stanley, K. O. and Miikkulainen, R. (2002). Evolving neural networks through augmenting
topologies. In Evolutionary Computation, volume 10, Cambridge. MIT Press.
18. Storm, T. (2004). KIKS is Khepera Simulator 2.2.0. (http://www.tstorm.se/projects/kiks/).
19. Wagner, A. and Arkin, R. C. (2003). Internalized plans for communication-sensitive robot
team behaviors. In Proc. of the IEEE/RSJ Conf. on Intelligent Robots and Systems.
20. Whitley, L. D. (1994). A genetic algorithm tutorial. In Statistics and Computing, volume 4.
21. Yao, X. (1999). Evolving artificial neural networks. In Proc. of the IEEE, volume 87.
