
MULTIOBJECTIVE OPTIMAL DESIGN OF STRUCTURE AND
CONTROL OF A CONTINUOUSLY VARIABLE TRANSMISSION
Jaime Alvarez-Gallegos, Carlos A. Cruz-Villar
CINVESTAV-IPN. Electrical Engineering Department.
Av. IPN 2508 Col. San Pedro Zacatenco. Apdo Post. 14 740 Mexico D.F.
Edgar A. Portilla-Flores
Universidad Autonoma de Tlaxcala. Engineering and Technology Department
Calz. Apizaquito s/n Km. 15, 90300 Apizaco Tlax. Mexico
Keywords:
Mechatronic system, parametric optimal design, continuously variable transmission.
Abstract:
An approach to solve the mechatronic design problem is to formulate the problem as a multiobjective dynamic
optimization problem (MDOP), where kinematic and dynamic models of the mechanical structure and the
dynamic model of the controller are considered besides a set of constraints and a performance criteria. This
design methodology can provide a set of optimal mechanical and controller parameters so that the desired
dynamic behavior and the performance criteria are satisfied. In this paper a MDOP is proposed and applied to a
continuously variable transmission (CVT). Performance criteria are the mechanical efficiency and the minimal
controller energy. The goal attainment method and a sequential approach are used to solve the MDOP.
1 INTRODUCTION
Optimization arises by the necessity to design or to
improve systems according to the requirement un-
der which systems operate. There are several crite-
ria that can help to quantify the system performance;
however, these criteria are often in conflict since fre-
quently the structural objectives of design require
hard conditions for the controller. Therefore the de-
sign problem is usually considered as a multiobjec-
tive design problem in order to obtain better systems.
Recent research in the area of mechatronic systems
exposes the need of a concurrent design methodol-
ogy for mechatronic systems. This methodology must
produce mechanical, electronical and control flexibil-
ity for the designed system (Zhang et al., 1999), (van
Brussel et al., 2001).
In (Li et al., 2001) a concurrent method for mecha-
tronic systems design is proposed. There, a simple
dynamic model of the mechanical structure is ob-
tained. The dynamic model obtained allows an easier
controller design which improves the dynamic perfor-
mance. However, this concurrent design concept is
based on an iterative process. This method obtains the
mechanical structure in a first step and the controller
design in a second step, if the resulting controller de-
sign is very difficult to implement, the first step must
be done again.
The main contribution of this paper is to develop
and apply an integral methodology to formulate the
system design problem in the dynamic optimization
framework. In order to do this, the parametric optimal
design of a pinion-rack continuously variable trans-
mission (CVT) is stated as a multiobjective dynamic
optimization problem (MDOP), where both the kine-
matic and dynamic models of the mechanical struc-
ture and the dynamic model of the controllers are
jointly considered besides system performance crite-
ria. The methodology allows us to obtain a set of opti-
mal mechanical and controller parameters in only one
step, which can produce a simple system reconfigura-
tion.
In the multiobjective optimization framework, a
classical approach is to reduce the original problem
into an equivalent single objective problem using a
weighted sum of the original objectives. In most of
the cases, this single objective problem will be eas-
ier to solve than the original multiobjective problem.
However, the weakness of the weighted method is that
not all of the non dominated solutions can be found
unless the problem is convex (Osyczka, 1984).
On the other hand, in spite of the development of
many control strategies in the last decades, the pro-
portional, integral and derivative (PID) controller re-
mains as the most popular approach for industrial
processes control due to the adequate performance in
most of such applications. Many PID design tech-
niques have been developed; these provide a sim-
154
Alvarez-Gallegos J., A. Cruz-Villar C. and A. Portilla-Flores E. (2005).
MULTIOBJECTIVE OPTIMAL DESIGN OF STRUCTURE AND CONTROL OF A CONTINUOUSLY VARIABLE TRANSMISSION.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics, pages 154-160
DOI: 10.5220/0001185001540160
Copyright
c
SciTePress
ple tuning process to determinate the PID controller
gains. However, these do not provide a good control
performance in all cases.
A MDOP can be solved by converting it into a non-
linear programming (NLP) problem (Kraft, 1985),
(Goh and Teo, 1988) and using the Goal Attainment
method (Liu et al., 2003) for the resulting problem.
Two transcription methods exist for the MDOP prob-
lem: the sequential and the simultaneous methods
(Betts, 2001). In the sequential method, only the
control variables are discretized; this method is also
known as the control vector parameterization. In the
simultaneous method the state and control variables
are discretized resulting in a large-scale NLP problem
which usually requires special solution strategies.
Current research efforts in the field of power trans-
mission of rotational propulsion systems, are dedi-
cated to obtain low energy consumption with high
mechanical efficiency. An alternative solution to this
problem is the so called continuously variable trans-
mission (CVT), whose transmission ratio can be con-
tinuously changed in an established range. There are
many CVT’s configurations built in industrial sys-
tems, especially in the automotive industry due to the
requirements to increase the fuel economy without
decreasing the system performance. The mechani-
cal development of CVT’s is well known and there
is little to modify regarding its basic operation prin-
ciples. However, research efforts go on with the con-
troller design and the CVT instrumentation side. Dif-
ferent CVT’s types have been used in different in-
dustrial applications; the Van Doorne belt or V-belt
CVT is the most studied mechanism (Shafai et al.,
1995), (Setlur et al., 2003). This CVT is built with
two variable radii pulleys and a chain or metal-rubber
belt. Due to its friction-drive operation principle, the
speed and torque losses of rubber V-belt are a dis-
advantage. The Toroidal Traction-drive CVT uses
the high shear strength of viscous fluids to transmit
torque between an input torus and an output torus.
However, the special fluid characteristic used in this
CVT becomes the manufacturing process expensive.
A pinion-rack CVT which is a traction-drive mecha-
nism is presented in (De-Silva et al., 1994), this CVT
is built-in with conventional mechanical elements as
a gear pinion, one cam and two pair of racks. The
conventional CVT manufacture is an advantage over
other existing CVT’s.
In this paper the parametric optimal design of a
pinion-rack CVT is stated as a MDOP to obtain a set
of optimal mechanical and controller parameters of
the CVT and, a higher mechanical efficiency and a
minimal energy controller. This paper is organized
as follows: The description and the dynamic CVT
model are presented in Section 2. The design vari-
ables, performance criteria and constraints to be used
in the parametric CVT design are established in Sec-
tion 3. Section 4 presents some optimization results
and discuss them. Section 5 presents some conclu-
sions and future work.
2 DESCRIPTION AND DYNAMIC
CVT MODEL
In order to apply the design methodology proposed
in this paper, the pinion-rack CVT presented in (De-
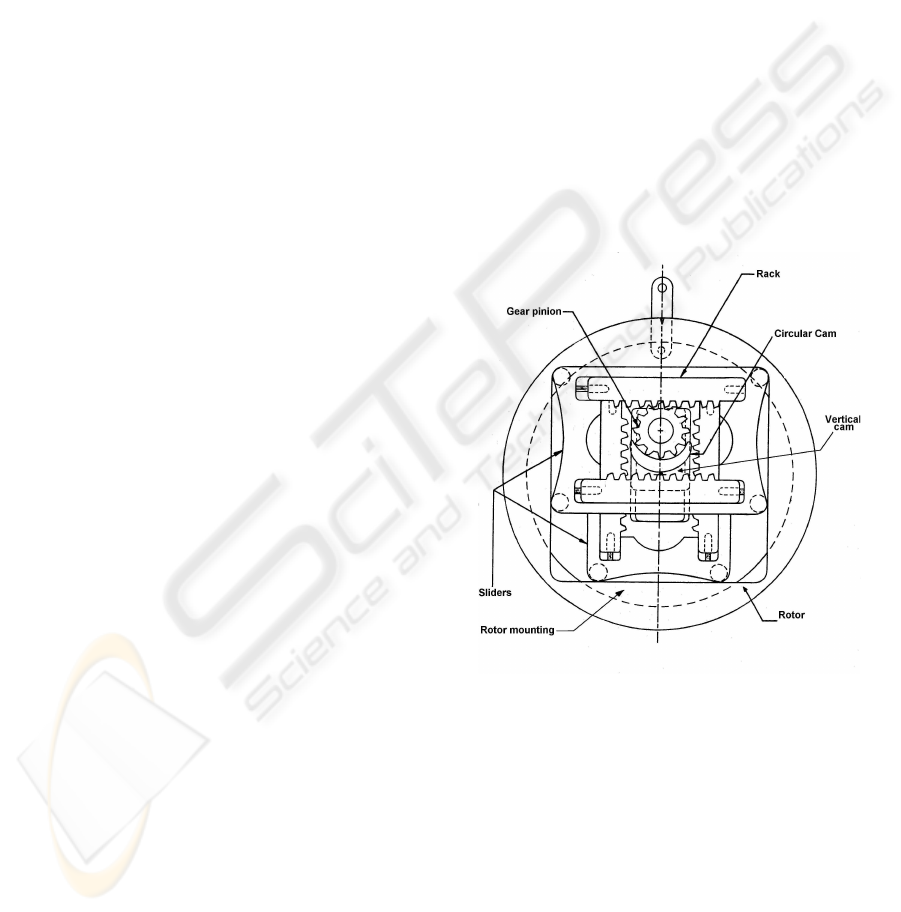
Silva et al., 1994) is used. The pinion-rack CVT,
changes its transmission ratio when the distance be-
tween the input and output rotation axes is changed.
This distance is called “offset” and will be denoted by
“e”. This CVT is built-in with conventional mechan-
ical elements as a gear pinion, one cam and two pair
of racks. Inside the CVT an offset mechanism is inte-
grated. This mechanism is built-in with a lead screw
attached by a nut to the vertical transport cam. Fig. 1
depicts the main mechanical CVT components.
Figure 1: Main CVT mechanical components
The dynamic model of a pinion-rack CVT is pre-
sented in (Alvarez-Gallegos et al., 2005). Ordinary
differential equations (1), (2) and (3) describe the
CVT dynamic behavior. In equation (1): T
m
is the
input torque , J
1
is the mass moment of inertia of the
gear pinion, b
1
is the input shaft coefficient viscous
damping, r is the gear pinion pitch circle radius, T
L
is the CVT load torque, J
2
is the mass moment of
inertia of the rotor, R is the planetary gear pitch cir-
cle radius, b
2
is the output shaft coefficient viscous
damping and θ is the angular displacement of the ro-
tor. In equations (2) and (3): L, R
m
, K
b
, K
f
and n
represent the armature circuit inductance, the circuit
MULTIOBJECTIVE OPTIMAL DESIGN OF STRUCTURE AND CONTROL OF A CONTINUOUSLY VARIABLE
TRANSMISSION
155

resistance, the back electro-motive force constant, the
motor torque constant and the gearbox gear ratio of
the DC motor, respectively. Parameters r
p
, λ
s
, b
c
and
b
l
denote the pitch radius, the lead angle, the viscous
damping coefficient of the lead screw and the viscous
damping coefficient of the offset mechanism, respec-
tively. The control signal u (t) is the input voltage to
the DC motor. J
eq
= J
c2
+ Mr
2
p
+ n
2
J
c1
is the
equivalent mass moment of inertia, J
c1
is the mass
moment of inertia of the DC motor shaft, J
c2
is the
mass moment of inertia of the DC motor gearbox and
d = r
p
tan λ
s
, is a lead screw function. Moreover,
θ
R
(t) =
1
2
arctan
tan
2Ωt −
π
2
is the rack angle
meshing. The combined mass to be translated is de-
noted by M and P =
T
m
r
p
tan φ cos θ
R
is the loading
on the gear pinion teeth, where φ is the pressure angle.
R
r
T
m
− T
L
=
"
J
2
+ J
1
R
r
2
#
¨
θ (1)
−
J
1
R
r
e
r
sin θ
R
˙
θ
2
+
b
2
+ b
1
R
r
2
+J
1
R
r
˙e
r
cos θ
R
˙
θ
L
di
dt
+ R
m
i = u (t) −
nK
b
d
˙e (2)
nK
f
d
i −P =
M +
J
eq
d
2
¨e +
b
l
+
b
c
r
p
d
˙e (3)
3 PARAMETRIC OPTIMAL
DESIGN
In order to apply the design methodology proposed in
this work, two criteria are considered. The first cri-
terion is the mechanical CVT efficiency which con-
siders mechanical parameters and the second criterion
is the minimal energy controller which considers the
controller gains and the dynamic system behavior.
3.1 Performance criteria and
objective functions
The performance of a system is measured by sev-
eral criteria, one of the most used criteria is the sys-
tem efficiency because it reflects the energy loss. In
this work, the mechanical efficiency criterion of the
gear systems is used in the optimization methodology.
This is because the racks and the gear pinion are the
principal CVT mechanical elements .
The mathematical equation (4) for mechanical ef-
ficiency presented in (Spotts, 1964) is used in this
work, where µ, N
1
, N
2
, m, r
1
and r
2
represent the
coefficient of sliding friction, the gear pinion teeth
number, the spur gear teeth number, the gear module,
the pitch pinion radius and the pitch spur gear radius
respectively.
η = 1 − πµ
1
N
1
+
1
N
2
= 1 −
πµ
2m
1
r
1
+
1
r
2
(4)
In (Alvarez-Gallegos et al., 2005) the speed ratio
equation is stated by (5), where ω is the input angular
speed and Ω is the output angular speed of the CVT.
ω
Ω
=
R
r
= 1 +
e
r
cos θ
R
(5)
Considering r
1
≡ r and r
2
≡ R, the CVT mechan-
ical efficiency is given by (6).
η(t) = 1 −
πµ
N
1
1 +
1
1 +
e cos θ
R
r
!
(6)
In order to maximize the mechanical CVT effi-
ciency, F (·) given by (7) must be minimized.
F (·) =
1
N
1
1 +
1
1 +
e cos θ
R
r
!
(7)
Equation (7) can be written as (8) which is used to
state the design problem objective function.
F (·) =
1
N
1
2r + e cos θ
R
r + e cos θ
R
(8)
The second objective function is stated to obtain the
minimal controller energy.
3.2 Constraint functions
The design constraints for the CVT optimization
problem are proposed according to geometric and
strength conditions for the gear pinion of the CVT.
To prevent fracture of the annular portion between
the axe bore and the teeth root on the gear pinion,
the pitch circle diameter of the pinion gear must be
greater than the bore diameter by at least 2.5 times
the module (Papalambros and Wilde, 2000). Then, in
order to avoid fracture, the constraint g
1
must be im-
posed. To achieve a load uniform distribution on the
teeth, the face width must be 6 to 12 times the value of
the module (Norton, 1996), this is ensured with con-
straints g
2
and g
3
. To maintain the CVT transmission
ratio in the range [2r, 5r] constraints g
4
, g
5
are im-
posed. Constraint g
6
ensures a teeth number of the
gear pinion equal or greater than 12 (Norton, 1996). A
practical constraint requires that the gear pinion face
width must be equal or greater than 20mm, in order
to ensure that, constraint g
7
is imposed. To constraint
ICINCO 2005 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
156

the distance between the corner edge in the rotor and
the edge rotor, constraint g
8
is imposed. Finally to
ensure a practical design for the pinion gear, the pitch
circle radius must be equal or greater than 25.4mm,
then constraint g
9
is imposed.
On the other hand, it can be observed that J
1
, J
2
are
parameters which are function of the CVT geometry.
For this mechanical elements the mass moments of
inertia are defined by
J
1
=
1
32
ρπm
4
(N + 2)
2
N
2
h (9)
J
2
= ρh
3
4
πr
4
c
−
16
6
(e
max
+ mN )
4
−
1
4
πr
4
s
(10)
where ρ, m, N, h, e
max
, r
c
and r
s
are the mater-
ial density, the module, the teeth number of the gear
pinion, the face width, the highest offset distance be-
tween axes, the rotor radius and the bearing radius,
respectively.
3.3 Design variables
In order to propose a parameter vector for the para-
metric optimal CVT design, the standard nomencla-
ture for a gear tooth is used.
Equation (11) states a parameter called module m
for metric gears, where d is the pitch diameter and N
is the teeth number.
m =
d
N
=
2r
N
(11)
The face width h, which is the distance measured
along the axis of the gear and the highest offset dis-
tance between axes e
max
are parameters which define
the CVT size.
The vector p
i
is proposed in order to carry out the
parametric optimal CVT design.
p
i
= [p
i
1
, p
i
2
, p
i
3
, p
i
4
, p
i
5
, p
i
6
]
T
= [N, m, h, e
max
, K
P
, K
I
]
T
(12)
3.4 Optimization problem
In order to obtain the mechanical CVT parameter op-
timal values, we propose a multiobjective dynamic
optimization problem given by equations (13) to (21).
As the objective functions must be normalized to
the same scale, the corresponding factors W =
[0.4397, 1126.71]
T
were obtained using the algorithm
of the subsection 3.5 by minimizing each objective
function subject to constraints given by equations (14)
to (21).
min
p∈R
6
F (x, p, t) = [F
1
, F
2
]
T
(13)
where
F
1
=
1
W
1
10
Z
0
1
p
1
p
1
p
2
+ x
3
cos θ
R
p
1
p
2
2
+ x
3
cos θ
R
dt
F
2
=
1
W
2
10
Z
0
u
2
dt
subject to
˙x
1
=
AT
m
+
h
J
1
A
2x
3
p
1
p
2
sin θ
R
i
x
2
1
− T
L
−
h
b
2
+ b
1
A
2
+ J
1
A
2x
4
p
1
p
2
cos θ
R
i
x
1
J
2
+ J
1
A
2
˙x
2
=
u (t) − (
nK
b
d
)x
4
− Rx
2
L
(14)
˙x
3
= x
4
˙x
4
=
(
nK
f
d
)x
2
− (b
l
+
b
c
r
p
d
)x
4
−
T
m
r
p
tan φ cos θ
R
M +
J
eq
d
2
u(t) = −p
5
(x
ref
− x
1
) − p
6
t
Z
0
(x
ref
− x
1
)dt (15)
J
1
=
1
32
ρπp
4
2
(p
1
+ 2)
2
p
2
1
p
3
(16)
J
2
=
ρp
3
4
3πr
4
c
−
32
3
(p
4
+ p
1
p
2
)
4
− πr
4
s
(17)
A = 1 +
2x
3
p
1
p
2
cos θ
R
(18)
d = r
p
tan λ
s
(19)
θ
R
=
1
2
arctan
h
tan
2x
1
t −
π
2
i
(20)
g
1
= 0.01 − p
2
(p
1
− 2.5) ≤ 0
g
2
= 6 −
p
3
p
2
≤ 0
g
3
=
p
3
p
2
− 12 ≤ 0
g
4
= p
1
p
2
− p
4
≤ 0
g
5
= p
4
−
5
2
p
1
p
2
≤ 0 (21)
g
6
= 12 − p
1
≤ 0
g
7
= 0.020 − p
3
≤ 0
g
8
= 0.020 −
h
r
c
−
√
2(p
4
+ p
1
p
2
)
i
≤ 0
g
9
= 0.0254 − p
1
p
2
≤ 0
MULTIOBJECTIVE OPTIMAL DESIGN OF STRUCTURE AND CONTROL OF A CONTINUOUSLY VARIABLE
TRANSMISSION
157

3.5 Solution algorithm
The resulting problem stated by (22)-(25) is solved
using the goal attainment method, which is described
below.
Lets consider the problem of minimizing (22)
F (x, θ, t) = [F
1
, F
2
]
T
(22)
F
i
=
Z
t
f
t
0
L
i
(x, θ, t)dt i = 1, 2
under θ and subject to:
˙x = f(x, θ, t) (23)
g(x, θ, t) ≤ 0 (24)
h(x, θ, t) = 0 (25)
x(0) = x
0
θ ∈ R
j
The gradient calculation (26) is obtained using the
sensitivity equations stated by (27).
∂F
i
∂θ
j
=
Z
t
f
t
0
∂L
i
∂x
∂x
∂θ
j
(t) +
∂L
i
∂θ
j
dt (26)
∂ ˙x
∂θ
j
=
∂f
∂x
∂x
∂θ
j
+
∂f
∂θ
j
(27)
Formulating the MDOP in the goal attainment
framework, the resulting problem is stated in equa-
tions (28) and (29) subject to equations (23) to (25),
where ω = [w
1
, w
2
]
T
is the scattering vector (Osy-
czka, 1984), F
d
= [1, 1]
T
are the desired goals for
each objective function and F
1
(θ) and F
2
(θ) are the
evaluated function.
min
θ,λ
G (θ, λ)
∆
= λ (28)
subject to:
g(θ) ≤ 0
g
a1
(θ) = F
1
(θ) − ω
1
λ − F
d
1
≤ 0 (29)
g
a2
(θ) = F
2
(θ) − ω
2
λ − F
d
2
≤ 0
A vector θ
i
which contains the current parameter
values is proposed and the NLP problem given by
equations (30) and (31) is obtained, where B
i
is the
BFGS updated positive definite approximation of the
Hessian matrix, and the gradient calculation is ob-
tained using sensitivity equations. Hence, if γ
i
solves
the subproblem given by (30) and (31) and γ
i
= 0,
then the parameter vector θ
i
is an original problem
optimal solution. Otherwise, we set θ
i+1
= θ
i
+ γ
i
and with this new vector the process is done again.
min
γ∈R
j+1
QP (θ
i
) = G
θ
i
+ ∇G
T
θ
i
γ +
1
2
γ
T
B
i
γ
(30)
subject to
g(θ
i
) + ∇g
T
θ
i
γ ≤ 0
g
a1
(θ
i
) + ∇g
T
a1
θ
i
γ ≤ 0 (31)
g
a2
(θ
i
) + ∇g
T
a2
θ
i
γ ≤ 0
4 OPTIMIZATION RESULTS
This section presents some optimization results when
the solution algorithm of section 3.5 is applied to
solve the problem stated in section 3.4 under the fol-
lowing conditions. The system parameters used in nu-
merical simulations were: b
1
= 1.1N ms/rad, b
2
=
0.05Nms/rad, r = 0.0254m, T
m
= 8.789Nm,
T
L
= 0Nm, λ
s
= 5.4271, φ = 20, M = 10Kg,
r
p
= 4.188E − 03m, K
f
= 63.92E − 03Nm/A,
K
b
= 63.92E − 03V s/rad, R = 10Ω, L =
0.01061H, b
l
= 0.015Ns/m, b
c
= 0.025Nms/rad
and n = ((22 ∗ 40 ∗ 33)/(9 ∗ 8 ∗ 9)). The initial con-
ditions vector was [x
1
(0), x
2
(0), x
3
(0), x
4
(0)]
T
=
[7.5, 0, 0, 0]
T
. In order to show the CVT dynamic per-
formance, for all simulations the output reference was
considered as x
ref
= 7.5 for 0 ≤ t ≤ 2; x
ref
= 7.2
for t > 2.
The goal attainment method requires the goal for
each one of the objective functions. The goal for F
1
was obtained by minimizing this function subject to
equations (14)-(21). The optimal solution vector p
1
is shown in table 1. The goal for F
2
was obtained
by minimizing this function subject to equations (14)-
(21). The optimal solution vector p
2
for this problem
is also shown in table 1.
Varying the scattering vector can produce different
non dominated solutions. In table 1, two cases are
presented; p
∗
A
is obtained with ω = [0.5, 0.5]
T
, p
∗
B
is
obtained with ω = [0.3, 0.7]
T
Figures 2, 3 and 4 show the mechanical CVT effi-
ciency, the control CVT input and the CVT output re-
spectively, with solutions vectors p
∗
A
, p
1
and p
2
. The
solution p
∗
A
was selected because it has the same over
achievement of the proposed goal for each function.
Discussion
Solutions p
∗
A
and p
∗
B
in table 1, have an euclidean
norm closer to that one associated to the proposed de-
sired vector of goals. These results are according with
the structure and control integration approach consid-
ered in this work.
It can be observed in figure (2), that the optimal
multiobjective solution implies a low sensitivity of
the mechanical efficiency with respect to reference
ICINCO 2005 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
158
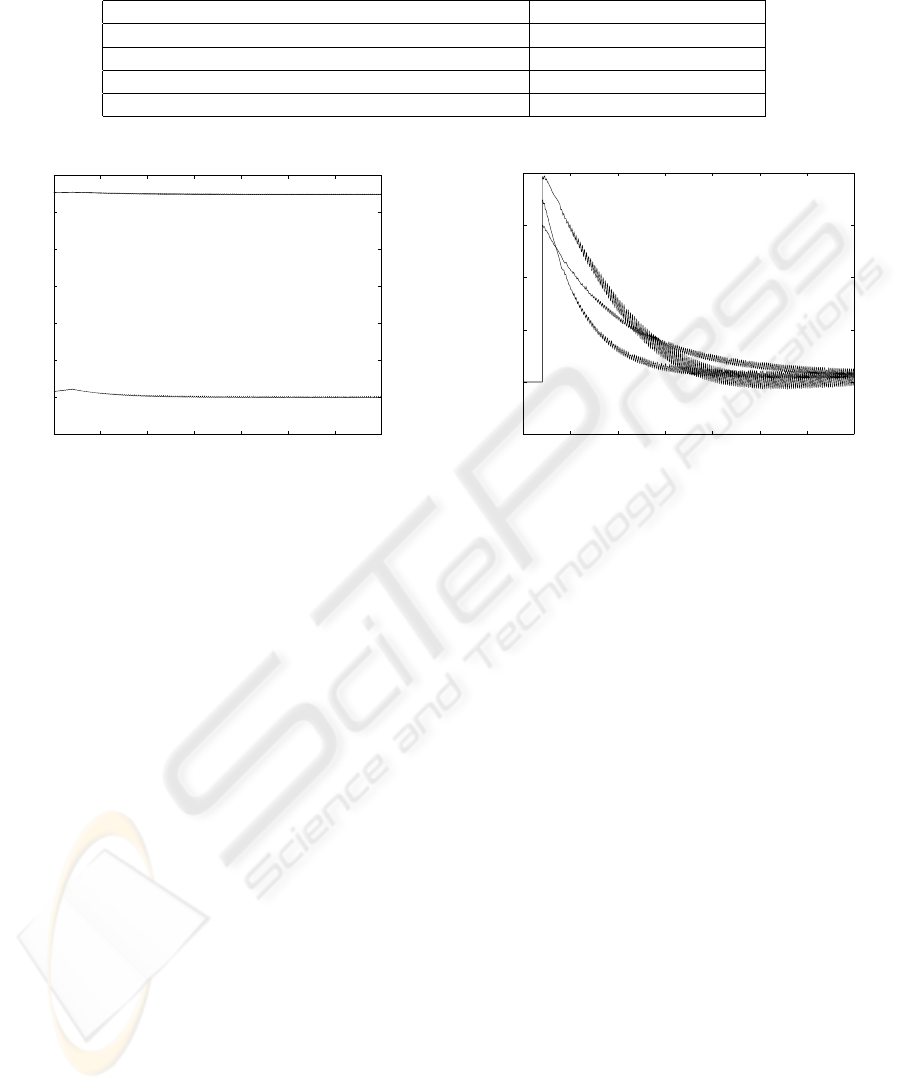
Table 1: MDOP solutions
[N
∗
, m
∗
, h
∗
, e
∗
max
, K
∗
P
, K
∗
I
]
F (•) = [F
1
(•), F
2
(•)]
p
1
= [38.1838, 0.0017, 0.02, 0.0636, 10.000, 1.00] F (p
1
) = [1.0000, 3.1580]
p
2
= [12.0000, 0.0028, 0.02, 0.0880, 5.000, 0.01] F (p
2
) = [3.1999, 1.0000]
p
∗
A
= [33.6469, 0.0017, 0.02, 0.0631, 5.000, 0.01] F (p
∗
A
) = [1.2149, 1.2149]
p
∗
B
= [38.1800, 0.0017, 0.02, 0.0636, 5.001, 0.01] F (p
∗
B
) = [1.0786, 1.2730]
0 5 10 15 20 25 30 35
0.91
0.92
0.93
0.94
0.95
0.96
0.97
0.98
t [s]
Mechanical efficiency
p*
p
1
p
2
Figure 2: Mechanical efficiency
changes. This is an advantage for CVT’s, because the
output speed requirements are usually changed.
In figure (3) it can be observed that the p
∗
A
vector
minimizes the initial overshoot of the control input.
This fact implies a lower mechanical system wear.
Figure (4) shows the output CVT behavior, it can be
observed that with the optimal multiobjective solution
a smoother convergence to the reference is obtained.
5 CONCLUSIONS
In this paper, we have developed a suitable parametric
optimal design methodology for mechatronic systems
where kinematic and dynamic behaviors are jointly
considered. This methodology was successfully ap-
plied to a traction-drive CVT. Results obtained lead
to a higher mechanical efficiency and to a minimal en-
ergy controller. The advantage of this design method-
ology is that the parametric optimal design can be
considered as a MDOP. Formulating it in the goal at-
tainment framework, new considerations for the op-
timization problem are applied to the objective func-
tions. This is a process which does not happen in a
weighted approach.
The slow CVT output convergence to the reference
shown in figure (4) is due to the small value of the lead
angle (λ
s
). Further work, will include this parameter
as an optimization variable.
0 5 10 15 20 25 30 35
−0.5
0
0.5
1
1.5
2
t [s]
Control u [V]
p*
p
1
p
2
Figure 3: Control input
Further research includes the proposal of new de-
sign constraints. These constraints must consider
stress conditions and bounding of the state variables.
On the other hand, another objective function of the
overall mechanical efficiency of the CVT, includ-
ing the offset mechanism and lead screw constraints,
could be considered in the parametric optimal design.
These facts would improve the CVT response.
REFERENCES
Alvarez-Gallegos, J., Cruz-Villar, C., and Portilla-Flores,
E. (2005). Parametric optimal design of a pinion-
rack based continuously variable transmission. In
IEEE/ASME International Conference on Advanced
Intelligent Mechatronics (Accepted paper).
Betts, J. (2001). Practical Methods for Optimal Control
using Nonlinear Programming. SIAM, Philadelphia,
USA, 1st edition.
De-Silva, C., Schultz, M., and Dolejsi, E. (1994). Kine-
matic analysis and design of a continuously variable
transmission. In Mech. Mach. Theory, Vol 29, No. 1
pp. 149-167. PERGAMON Press.
Goh, C. and Teo, K. (1988). Control parametrization: a uni-
fied approach to optimal control problems with gen-
eral constraints. In Automatica, Vol 24, No. 1 pp. 3-18.
Pergamon Journals Ltd.
Kraft, D. (1985). On converting optimal control problems
MULTIOBJECTIVE OPTIMAL DESIGN OF STRUCTURE AND CONTROL OF A CONTINUOUSLY VARIABLE
TRANSMISSION
159

into nonlinear programming problems. In Computa-
tional Mathematical Programming, NATO ASI Series
Vol F15, pp. 261-280. Springer-Verlag.
Li, Q., Zhang, W., and Chen, L. (2001). Design for control-a
concurrent engineering approach for mechatronic sys-
tems design. In Transactions on Mechatronics, Vol 6,
No. 2 pp. 161-168. IEEE/ASME.
Liu, G. P., Yang, J., and Whidborne, J. (2003). Multiobjec-
tive Optimisation and Control. Research Studies Press
LTD., Baldock, Hertfordshire, England, 1st edition.
Norton, R. (1996). Machine Design, An integrated ap-
proach. Prentice Hall Inc., Upper Saddle River, NJ
07458, 1st edition.
Osyczka, A. (1984). Multicriterion optimization in engi-
neering. John Wiley and Sons., 605 Third Avenue,
New York, N.Y. 10016, USA., 1st edition.
Papalambros, P. and Wilde, D. (2000). Principle of opti-
mal design. Modelling and computation. Cambridge
University Press, The Edinburg Building, Cambridge
CB2 2RU, UK, 1st edition.
Setlur, P., Wagner, J., Dawson, D., and Samuels, B. (2003).
Nonlinear control of a continuously variable transmis-
sion (cvt). In Transactions on Control Systems Tech-
nology, Vol 11, pp. 101-108. IEEE.
Shafai, E., Simons, M., Neff, U., and Geering, H. (1995).
Model of a continuously variable transmission. In
First IFAC Workshop on Advances in Automotive Con-
trol, pp. 575-593.
Spotts, M. (1964). Mechanical Design Analysis. Prentice
Hall Inc., Englewood Cliffs, N.J., 1st edition.
van Brussel, H., Sas, P., N
´
emeth, I., Fonseca, P. D., and
van den Braembussche, P. (2001). Towards a mecha-
tronic compiler. In Transactions on Mecatronics, Vol
6, No. 1 pp. 90-104. IEEE/ASME.
Zhang, W., Li, Q., and Guo, L. (1999). Integrated design
of a mechanical structure and control algorithm for a
programmable four-bar linkage. In Transactions on
Mechatronics, Vol 4, No. 4 pp. 354-362. IEEE/ASME.
0 5 10 15 20 25 30 35
7.15
7.2
7.25
7.3
7.35
7.4
7.45
7.5
7.55
7.6
t [s]
Output angular speed [rad/s]
p*
p
1
p
2
Figure 4: Output CVT behavior
ICINCO 2005 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
160
