
STEREO IMAGE BASED COLLISION PREVENTION USING THE
CENSUS TRANSFORM AND THE SNOW CLASSIFIER
Christian K
¨
ublbeck, Roland Ach, Andreas Ernst
Fraunhofer Institute for Integrated Circuits
Am Wolfsmantel 33
Keywords:
stereo, obstacle detection, census transformation, SNoW classifier.
Abstract:
In this paper we present an approach for a mobile robot to avoid obstacles by using a stereo-camera system
mounted on it. We use the “census transformation” to generate the features for the correspondence search. We
train two SNoW (Spare Network of Winnovs)-classifiers, one for the decision wether to move straight forward
or to evade and a second one for deciding whether to turn left or right when evading. For training we use a
sample set collected by manually moving around with the robot platform. We evaluate the performance of the
whole recognition chain (feature generation and classification) using ROC-curves. Real world experiments
show the mobile robot to safely avoid obstacles. Problems still arise when approaching steps or low obstacles
due to limitations in the camera setup. We propose to solve this problem using a stereo camera system capable
of pan and tilt movements.
1 INTRODUCTION
The detection of obstacles is an important research
topic in the field of autonomous robots. Collisions
have to be avoided, since robots must neither endan-
ger human beings through their movement nor dam-
age themselves or objects in the environment. The
aim of the present work is to develop a system for
obstacle detection and collision avoidance for an au-
tonomous robot with the aid of a stereoscopic camera
setup. Further on aiming at a later 3D-map genera-
tion of the environment an unsupervised exploration
trip through a building should be permitted. For that
purpose appearing obstacles like walls, objects or per-
sons must be detected.
1.1 Overview
The robot is based on a mobile platform named Volks-
Bot
1
that consists of a main frame with the dimen-
sions 40 x 40 x 80 cm. The drive mechanism is made
up of two DC-motors with 22 W power and 24 V
nominal voltage. The two drive wheels forms a tri-
angle together with a third rear wheel. On the lower
1
The VolksBot has been developed by the Fraunhofer In-
stitute for Autonomous Intelligent Systems AIS in Sankt
Augustin, Germany.
Figure 1: The robot based on the mobile platform VolksBot.
platform a standard notebook with an 1.6 MHz mo-
bile processor is placed. The communication with the
motor controller is established by the serial RS232-
Interface.
For stereo image capturing, we use two firewire
cameras. They are mounted parallel to each other on
a small upper platform at a height of 80 cm. The op-
tical axes are arranged in a distance of approximately
447
Küblbeck C., Ach R. and Ernst A. (2005).
STEREO IMAGE BASED COLLISION PREVENTION USING THE CENSUS TRANSFORM AND THE SNOW CLASSIFIER.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 447-454
DOI: 10.5220/0001184804470454
Copyright
c
SciTePress
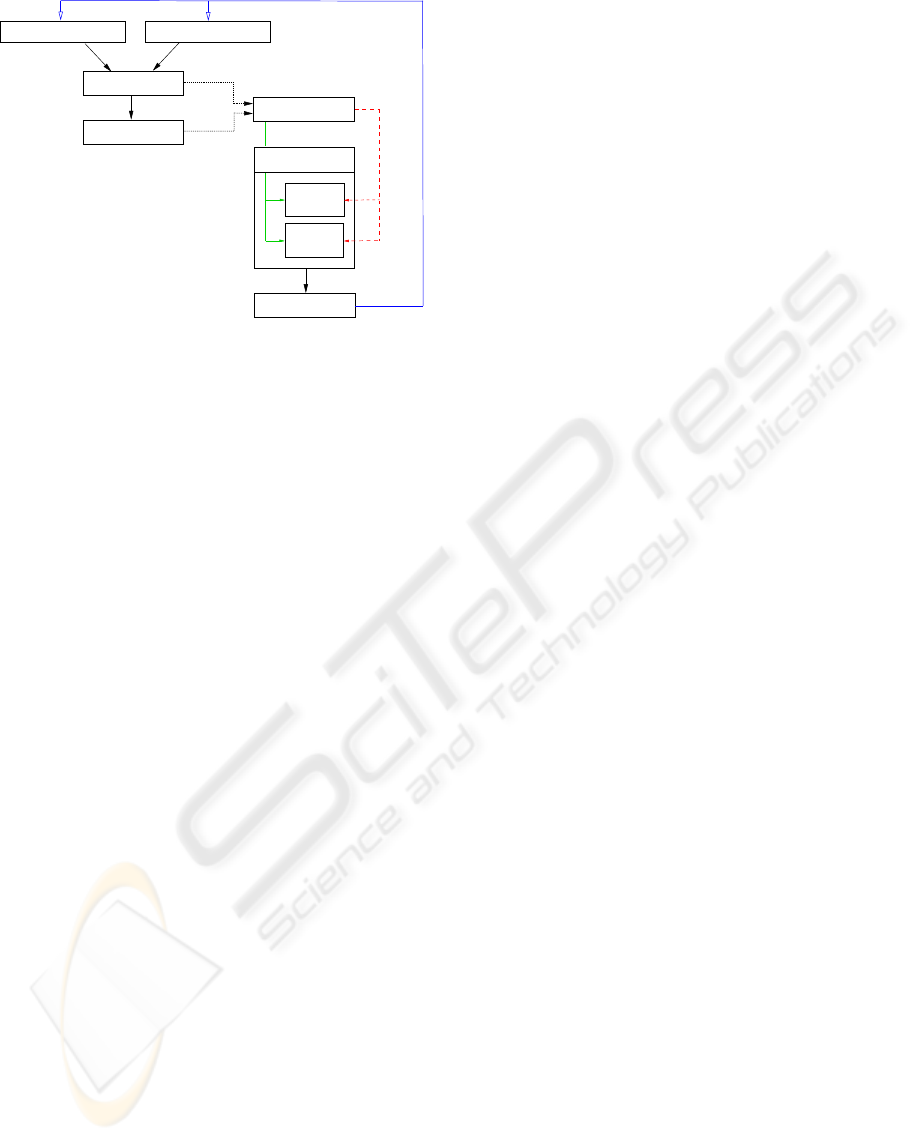
Image from right Camera
Train
Image from left Camera
Depth Map
Disparity Image
Obstacle
Classifier
Direction
Classifier
Classify
Feature Extraction
Robot Drive
State Machine
Figure 2: System structure.
10 cm. Both cameras are equipped with a wide angle
lens with 4.2 mm of focal length.
Figure 2 shows the structure of the system setup.
Two cameras are used for image capturing. We are
scaling down the images to a size of 320 x 240 pix-
els and only use one single color channel. A pair of
images is grabbed approximately every 240 ms. Thus
about four frames per second are processed. In or-
der to extract depth-information, a disparity image is
determined by means of block matching. To reduce
noise artifacts smoothing filters like mean or median
are applied to the original images. Additionally we
use the census transform to get suitable images for
the subsequent block matching. Using a lookup table
derived from the camera geometry, we can calculate
a depth map from the disparity image. These results
serve as the basis for the feature extraction. Hence the
complete disparity image or depth map can be used. It
is also possible only to use the distance of the nearest
obstacle for each picture column of the depth map.
Alternatively height information of the objects situ-
ated in the area can be included.
Based on the classification results the robot is con-
trolled in its movements. We are using two state ma-
chines. Therefore, two classifiers are integrated. The
first one recognizes obstacles that have to be avoided.
If an obstacle is detected, the second classifier is
asked for a preferred evasive direction. This direc-
tion is retained until a movement straight forward is
possible again.
1.2 State of the Art
Most solutions of obstacle avoiding robots use laser
range sensors, ultrasonic or infrared sensors, but there
are also realizations using cameras. Especially 2-
camera-systems often serve as a basis for the obstacle
detection.
In this sense, Kumano, Ohya and Yuta
(Masako Kumano and Yuta, 2000) follow a very sim-
ple approach. Using two cameras directed in a fixed
angle towards the ground, images of the environment
are obtained. Starting from the geometrical setup
between the cameras and the floor, corresponding
points in both images are determined. Intensity
differences between corresponding points in both
images are assumed to be an obstacle in the way. The
scan lines correspond to different distances according
to the camera arrangement. Evaluating merely three
scan lines that represent the distances 40 cm, 65 cm
and 100 cm, a fast computing time (35 ms) can be
guaranteed.
Sabe, Fukuchi, Gutmann, Ohashi, Kawamoto and
Yoshigahara (Kohtaro Sabe et al., 2004) also use two
CCD-cameras. These are integrated in the humanoid
Sony QRIO Robot. Firstly landmark points of the en-
vironment are searched in both images. These points
appear in different picture coordinates according to
the different camera views and the distance. Using
these disparities, 3D coordinates can be computed.
On this basis the robot detects possible obstacles on
the floor level, that are used for path planning.
The electrical wheelchair Victoria (Libuda and
Kraiss, 2004) computes a depth map from the in-
cluded scene with the aid of a camera pair. Additional
corners and edges are determined in different detec-
tion stages and grouped to regions which correspond
to certain objects in the room. Using fixed relations
between these landmarks a model of the surroundings
can be produced with the corresponding distance in-
formation. One can search the walls for regions like
doors and the floor for obstacles.
There is still a number of further approaches with
two camera systems. For example the NEUROS
project at the Ruhr University of Bochum with its
visually controlled service robot Arnold uses such
a construction (Ruhr-Universit
¨
at, 1997). Arnold ex-
tracts edges from both images and calculates their dis-
tances by the shift of these landmarks. Hence apart
from an obstacle detection, card generation of the en-
vironment is possible. In unknown areas the robot
turns by 360 degrees to get the necessary data. To
evade people optical flow is included.
Another example is the Ratler (robotic all terrain
lunar exploration rover) (Reid Simmons and Whelan,
1996). It moves in an unknown area with a height-
map of the environment. This map is generated by the
extraction of 3D-points from a stereo-camera-system.
Daimler Chrysler develops a system for the detec-
tion of pedestrians (D.M. Gavrila and Munder, 2004).
At first a disparity image indicates potential areas. By
an edge extraction of these regions a comparison with
sample forms of persons is possible.
ICINCO 2005 - ROBOTICS AND AUTOMATION
448
f
f
d
d
Baseline b
optical axis
optical axis
M ( x , y , z )
c
c
x
c
z
c
u
r
l
u
u
r
− u
− u
− u
l
r r
l
l
r
l
c
m ( u , v )
m ( u , v )
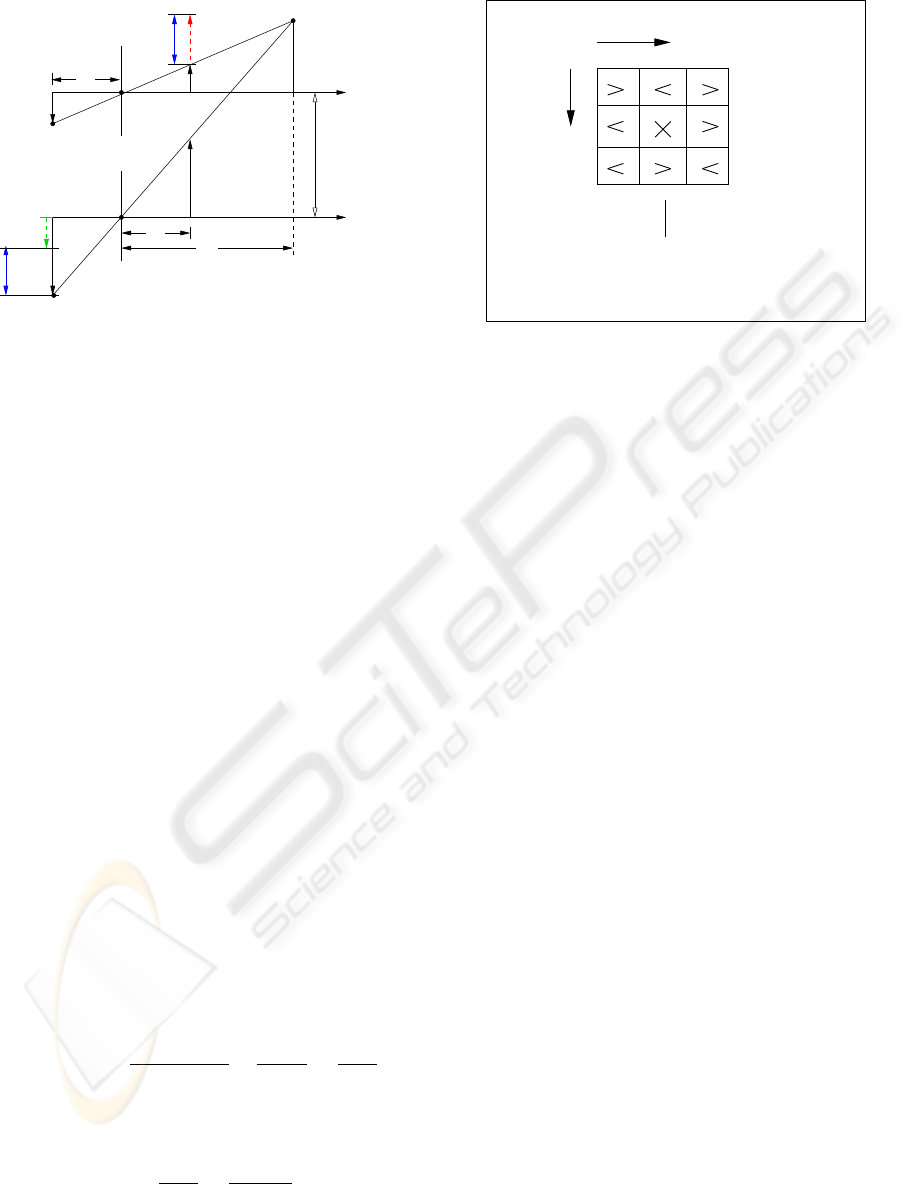
Figure 3: Simple model of the stereo camera system.
2 FEATURE GENERATION
2.1 Camera Setup and Stereo
Geometry
A standard camera projects three-dimensional objects
of the real world onto the 2D image plane. A very
simple model of this process is given by the pinhole
camera. In this case the optic consists of one infinitely
small hole.
A simple possibility to recover depth information
of the captured scene is an extension of a single cam-
era by a second identical camera with same focal
length. The visual axes of both cameras are arranged
in parallel and on the same level. In figure 3 a point M
of the real world is projected to different coordinates
m
r
(u
r
, v) and m
l
(u
l
, v) on the image planes because
of the varying camera viewpoints. The difference is
called disparity d. Using the knowledge about the
geometrical camera setup and the focal length f the
distance z
c
of the point M from the camera plane can
be computed by means of the disparity. It is inversely
proportional to the distance.
Depending on the distance b of the two camera axis
the following relations can be derived from the stereo-
geometry:
d = u
r
− u
l
=
f ∗ (x
c
+ b)
z
c
−
f ∗ x
c
z
c
=
f ∗ b
z
c
. (1)
Using the disparity d the distance z
c
can therefore
be computed by
z
c
=
f ∗ b
d
=
f ∗ b
u
r
− u
l
. (2)
The standard stereo geometry assures that arbitrary
points of the 3D scene are always projected into the
CensusVector 101 01 010
Neighborhood
Pixel
Image
Scanning
Figure 4: The census transform: Each pixel is compared
with its eight neighbours. From the binary results of the
comparisons a feature of one byte is constructed.
same line in both images. For this reason only hor-
izontal disparities appear. This restriction is called
epipolar constraint. Hence the search area finding
corresponding points in both image planes can be re-
duced to one dimension.
It is important to mention that disparities can be
determined only for points from objects that can be
observed in both images. With increasing camera dis-
tance b this overlap becomes smaller.
2.2 The Census Transform
In order to compute disparity informations it is nec-
essary to find corresponding points in both images.
It has to be considered, that the internal attitudes of
the two cameras can differ, regarding gain and biases.
Therefore corresponding regions may have different
absolute intensities. To solve this problem we use the
census transform proposed by Zabih and Woodfill. It
offers a brightness invariant comparison possibility.
Additionally it provides an efficient and fast methods
to extract features for structured image regions that
can serve as feature points.
The census transform compares each pixel with its
eight neighboring pixels. If the intensity of the center
is greater, the appropriate bit of the census feature is
set, otherwise cleared. Therefore the census feature
has eight bit and can be used to represent a grey tone
in a new “census-image”. The shift of the window
over the entire image results in a complete census im-
age. This procedure is applied to both camera images.
The distance between two census features can be
computed using the hamming distance. It is calcu-
lated by counting the number of bits that differ within
both census features.
To find corresponding points for each area of the
STEREO IMAGE BASED COLLISION PREVENTION USING THE CENSUS TRANSFORM AND THE SNOW
CLASSIFIER
449
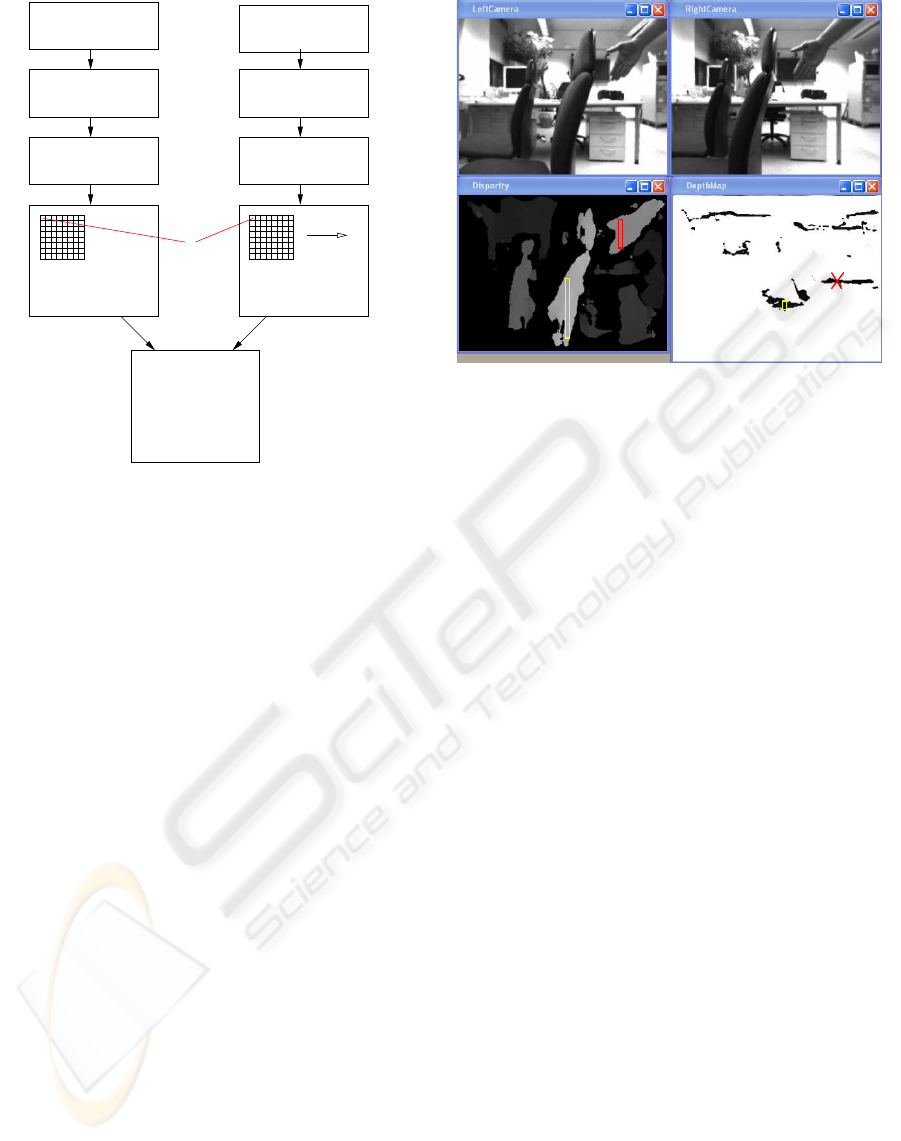
Image from left Camera
Mean / Median
Census transformation
Census Image
Census transformation
Census Image
Disparity Image
Image from right Camera
Mean / Median
HammingDistance
Figure 5: Generation of the disparity image.
first census image every point is compared to each
region in the second census image within the same
image line. The hamming distance between all pairs
of points is calculated and summed up for the com-
plete area. The minimum distance for each pixel cor-
responds to the most similar picture region.
2.3 Generation of Disparity Maps
and Features
As figure 5 shows, the original camera images are
filtered at the beginning of the process, alternatively
with a mean or median filter of size 3 × 3. Then the
census transform is used to find corresponding pixels
in both images.
To generate the disparity image a block matching
procedure is used. This method takes a pixel neigh-
borhood to find similar areas. The size of this region
is parameterizable.
The best disparity is estimated at the points where
the hamming distance reaches its minimum. Addi-
tionally the applied algorithm uses a so-called confi-
dence procedure which describes the reliability of the
estimation. This is done by computing firstly the ham-
ming distance at the estimated disparity and the aver-
age of discrete similarity values obtained shifting the
window along the image line. If the distance between
both is smaller than a fixed confidence threshold the
result is discarded and the appropriate pixel in the dis-
parity picture is set to zero. This method affects par-
ticularly weakly textured, homogeneous areas where
Figure 6: Disparity image and depth map.
wrong assignments occur rather often. Figure 6 shows
an example of a disparity image. Brighter parts of the
image correspond to closer ranges, dark regions be-
long to more distant objects in the scene.
From the disparity image a kind of bird’s eye view
of the captured scene can be generated by summing
up the existing disparity values for each column ac-
cording to their occurrence by registering them in a
depth map. The y-axis represents the disparities, the
x-axis the picture column. The value contains infor-
mation about the vertical expansion of the objects.
The objects can be found according to their order in
the depth map. With help of the stereo geometry and
equation 2 the distance can be determined in real met-
ric numbers. So the two office chairs are about 54
cm and 104 cm away from the cameras. The hand
is found approximately 69 cm in front of the camera.
As we will see later this knowledge is not necessary
for our approach. The critical distance for objects in
front of the robot is implicit given by the disparities
of the training data containing an obstacle. Of course
the reliability of the depth map strongly depends on
the quality of the disparity image.
Human beings are able to recognize directly from
the depth map whether an obstacle is in a critical
range. In opposite a computer has to perform an addi-
tional preprocessing step for feature extraction prior
to the classification. For this purpose a very simple
approach is coding the respective pixels of the dis-
parity image or depth map with coordinates and grey
tones in a characteristic feature vector. Of course the
feature vector and each feature respectively, depen-
dent on the dimensions of the image, can become very
large. In order to handle these data the images can be
scaled down. On basis of a size of 320 × 240 a re-
duction to 80 × 60 makes sense. Besides the above
ICINCO 2005 - ROBOTICS AND AUTOMATION
450
Distance Contour from DepthMap
Complete Disparity− or Depthmap
Pixel ( 0 , 0 )
Pixel ( 0 , Distance ) Pixel ( Width , Distance )
Pixel ( Width , Height )
Column Distance
Column Distance
Intensity
Intensity
X X
Disparity DisparityYY
Figure 7: Possible encodings of the feature vectors.
x 2
F 1
y 1
C s
F 2
SNOW
y 2
y 1 − y 2
x n
FeatureVector TargetNodesInputNodes
x 1
w1n
w21
w2n
w11
Figure 8: Architecture of the SNoW-classifier
rather simple approach it is also possible to use only
one value representing the nearest obstacle for each
column of the depth map. With respect to the whole
image pair thus a distance contour of the objects arises
from the field of vision of the robot. Figure 7 illus-
trates both methods of feature encoding.
3 CLASSIFICATION WITH SNOW
The classification has to categorize a characteristic
feature vector by comparison with reference samples.
Due to the very complex features a neural network
which can build high-dimensional separation func-
tions between the individual classes is used. In this
work we use a special network named SNoW (Sparse
Network of Winnows)(Yang et al., 2000). The SNoW
is characterised by high detection achievement and
speed. Therefore it is used in speech processing or
in the field of face detection. In this case the classi-
fier has to decide between the classes ’forward’, ’turn
left’ and ’turn right’. Hence, two classifiers are used.
The first one decides between free and obstacle, the
second one suggests a suitable evasive direction if it
is necessary.
The architecture of the network consists of a layer
of input nodes and a layer of target nodes. One target
node represents a special class. Both levels are con-
nected by weighted edges. The number of input nodes
Feature 1
Feature 4800
21 Bit
21 Bit
Decimal 68
0
0
0
7 Bit
1 1
0
68
0000000
000000
01000100
1001111
00110001
111011
1309489
Decimal 1309489
8 Bit6 Bit7 Bit 6 Bit
8 Bit
2^21−1
= 2097151
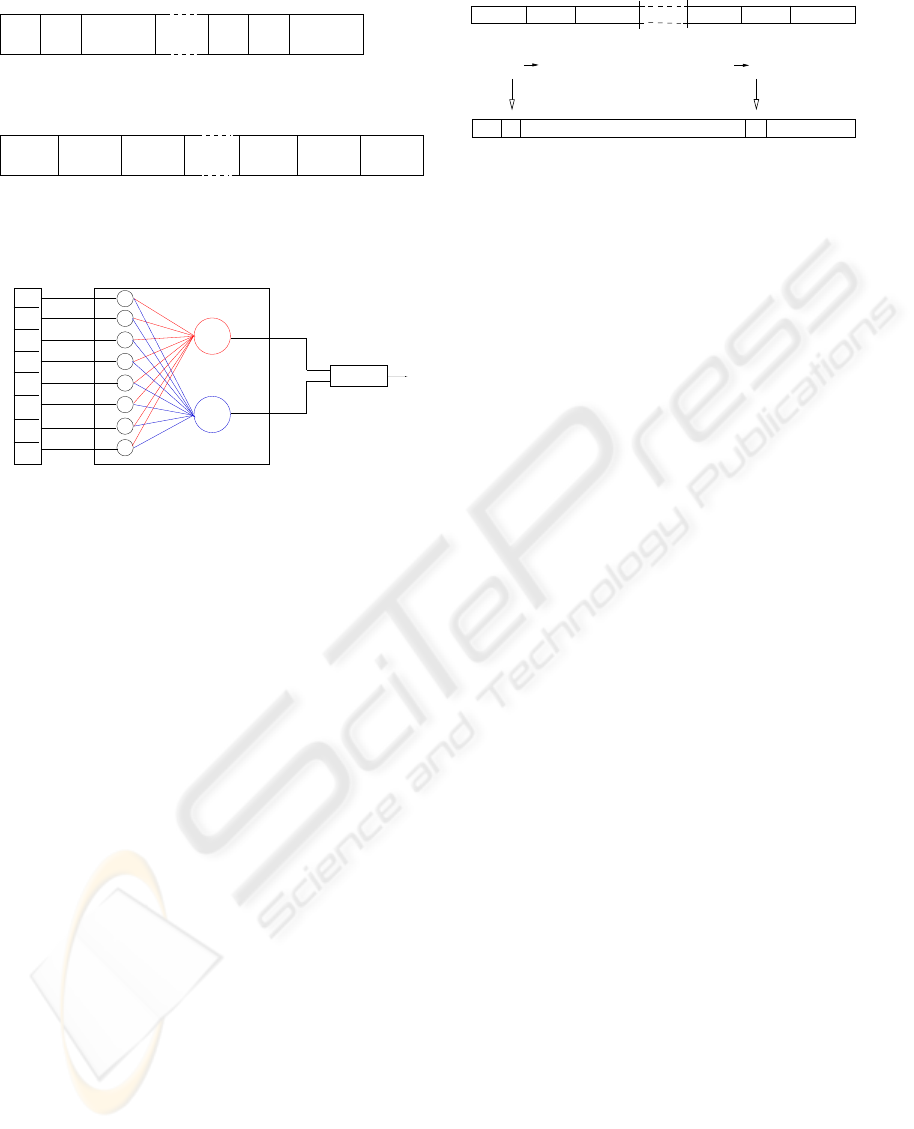
Figure 9: SNoW-feature vector
depends on the binary representation of the charac-
teristic feature vectors. Figure 9 shows such a struc-
ture for a pixel-coded depth map with a dimension of
80×60 pixels. The vector length depends on the num-
ber of bits per feature: length = 2
bits per feature
. In this
case each feature represents a position within the vec-
tor according to its binary value. In these places the
vector takes the value ’1’. The remaining positions
are set to ’0’.
Vector entries with the value 1 are called active
characteristics. Only these components are attached
over weights to the target nodes t. The activation F
t
of these elements is determined over the sum of the
connected weights according to equation 3. However,
these nodes are active only if their activations exceed
a certain class threshold Θ
t
:
Θ
t
< F
t
=
X
i∈A
t
w
t
i
(3)
A
t
here is the amount of all active features i con-
nected to the node t: A
t
= {i
1
, ..., i
m
} .
The weights are at first uniformly determined. Dur-
ing the training phase an adjustment takes place only
if a false classification happens. The update strategy
is based thereby on a promotion parameter α > 1 for
increasing and a demotion parameter 0 < β < 1 for
reducing the values.
With well-known input vectors
b
t for the class t and
the quantity of the active features m
j
the following
relationships are established:
if
b
t = t and F
t
(m
j
) ≤ Θ
t
: ∀
i
∈ A
t
: w
i
t
← α∗w
i
t
(4)
if
b
t 6= t and F
t
(m
j
) ≥ Θ
t
: ∀
i
∈ A
t
: w
i
t
← β∗w
i
t
(5)
The values supplied by each target node, also called
scores are charged with each other. Given that we
only have two-category problems the affiliation is car-
ried out using the score difference c = F
1
− F
2
. So a
special decision instance is used that can be parame-
trized with a threshold. Thus a sensitivity regulation
for a certain class becomes feasible.
STEREO IMAGE BASED COLLISION PREVENTION USING THE CENSUS TRANSFORM AND THE SNOW
CLASSIFIER
451
if ( FREE )
if ( FREE )
if ( OBSTACLE )
Classifier
Classifier
Classifier
Classifier
Ask Obstacle
Ask Obstacle
Ask Obstacle
Ask Direction
if ( OBSTACLE )
Turn RightDrive Forward
if ( FREE )
Turn Left
if ( OBSTACLE )
if ( LEFT ) if ( RIGHT )
Figure 10: State machine.
The decision for class 1 is made if c +
Sensitivity > 0 and similarly the decision for class
2 is made if : c + Sensitivity ≤ 0
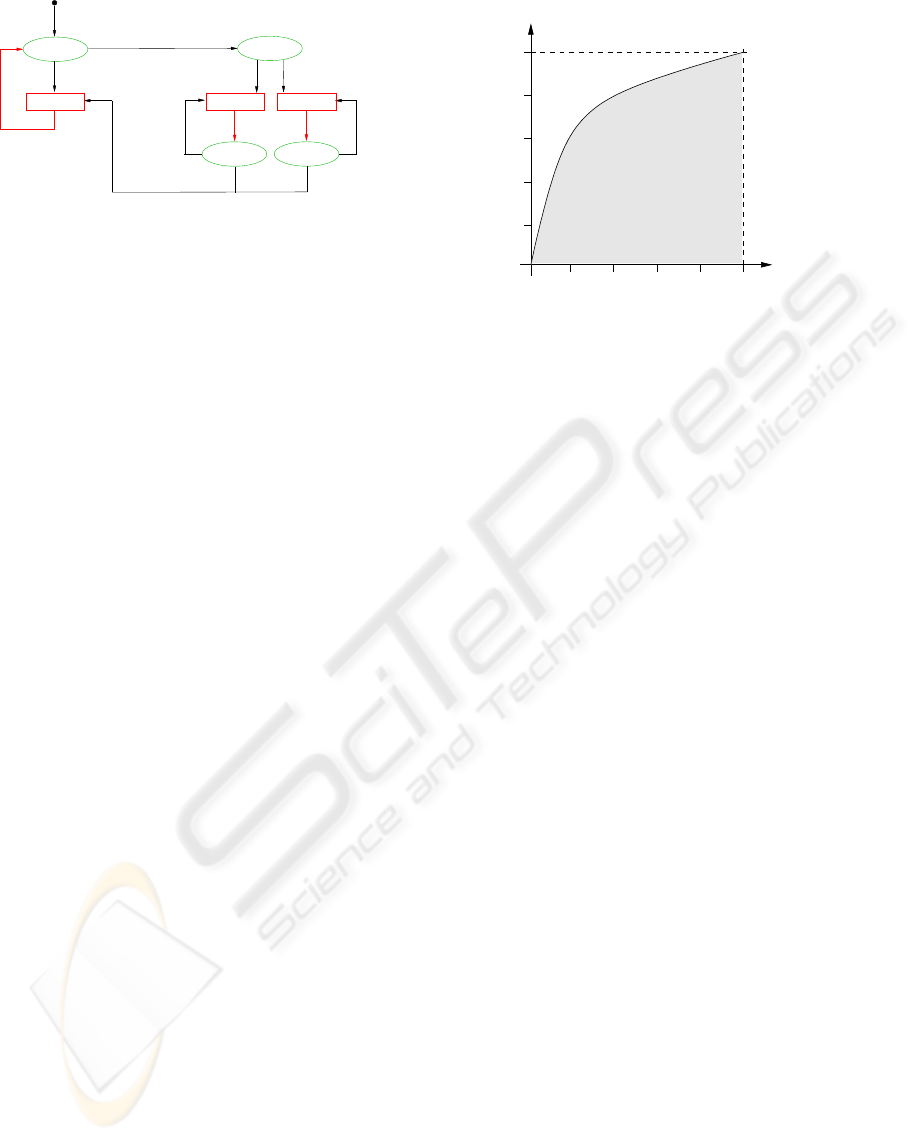
In order to guide the robot, control commands must
be sent to the motor controller permanently. The co-
ordination of these instructions needs a state machine
presented in figure 10. This machine is in one of
the three possible states ’forward’, ’turn left’ or ’turn
right’ at each time. The transitions are fixed exactly
and are followed according to the appearing events.
Each instance contains one SNoW-classifier for the
obstacle detection and one for the direction decision,
respectively. At the beginning an image pair is ex-
amined and it is decided, whether an obstacle is in
front of the robot. If this is true the second classifier
is asked about a suitable evasive direction. The unity
therefore represents the condition ’turn left’ or ’turn
right’. This decision has to be maintained until the
obstacle detector indicates a free way again. Then the
machine again represents the condition ’forward’.
4 EXPERIMENTS AND RESULTS
The training data was collected by controlling the ro-
bot manually. Normally the robot moves straight on.
If there is an obstacle in front of it a change of di-
rection can be enforced by pressing the left or right
mouse button depending on the best way to elude.
This movement is maintained till the button is re-
leased. In this case the vehicle goes straight on again.
During the complete journey the system saves the
two current camera images on hard disk. This hap-
pens approximately at a rate of five frames per sec-
ond. The size of the images is 320 × 240 pixel using
only grey level format. Hence the file size is reduced
to about 40 kB. In order to mark obstacles the file-
name consists of a time stamp and the current control
information like forward, left or right.
This way approximately 100,000 training images
were recorded. 39552 pairs correspond to the class
’forward’, 9342 couples containing obstacles. To find
alternate directions 4788 pairs represent turns to the
0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.6
0.2
0.4
0.8
1.0
Sensivity
1 − Specificity
Area Under Curve
Figure 11: ROC-curve.
left, 4554 turns to the right. This data is grouped
in two different lists. On the one hand all files are
taken up to an obstacle list, whereby the classes ’turn
left’ and ’turn right’ correspond to an obstacle. On
the other hand a direction list covers all image pairs
which are not part of the class ’forward’. These two
lists are used for the training of the obstacle classifier
and direction classifier respectively.
Depending on preprocessing and feature extraction
the training takes up to eight hours on standard hard-
ware (with a 1.5 GHz processor). Both classifiers
are trained separately. For evaluation purposes fur-
ther test data has been collected. It consists of 14447
image pairs divided in 13119 with the label ’for-
ward’, 790 of the class ’turn left’ and 538 of the class
’turn right’. By comparison of the well known class
memberships with the classification result a statement
about the quality of the trained classifiers can be met.
With the search for a proved decision criteria for
the optimization of the preprocessing and feature ex-
traction parameters like block size, search width, con-
fidence threshold, mean or median filtering of the
depth map, etc. the choice felt on the so-called ROC
curve. The ROC method applies the fraction of cor-
rect classified obstacles to the y-axis of a diagram. On
the x-axis the ratio of wrong classified free areas is
registered. These informations are based on sample
data. Figure 11 shows a sample ROC curve. The ap-
pearance of the curve is based on different decision
borders. On the left side the curve starts with a very
high separative work. One surveys everything, how-
ever no images of the class ’forward’ were classified
falsely as an obstacle. The lowest decision limit lies
on the right side. One does not survey anything, since
one categorizes all inputs as obstacle. In view on the
choice of these separative borders it is necessary to
look on the scores determined by the obstacle classi-
fier for both classes.
The area below the curve is a measure for the qual-
ICINCO 2005 - ROBOTICS AND AUTOMATION
452
0
0.2
0.4
0.6
0.8
1
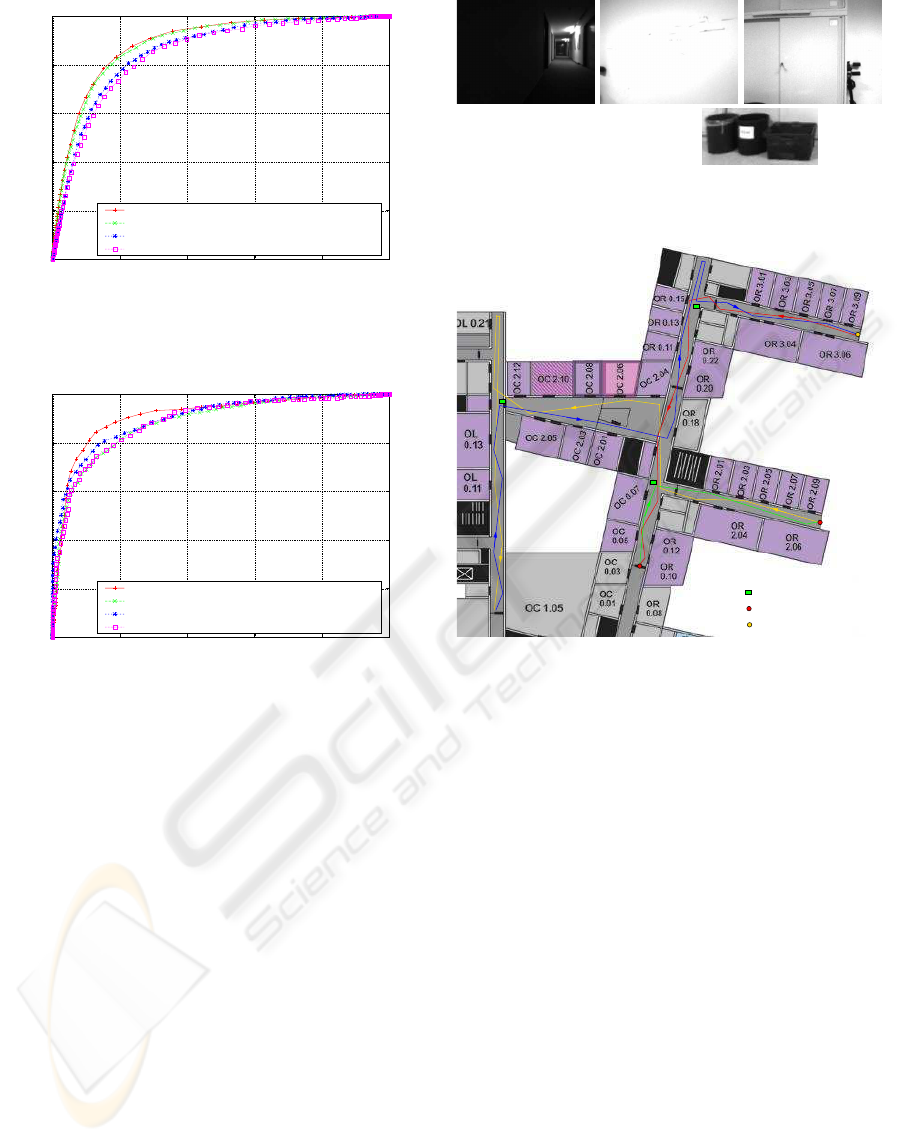
0 0.2 0.4 0.6 0.8 1
Detection rate (DET)
False acceptance rate (FAR)
Best DisparityMap
Best DepthMap
Best Distance Vector
Best Distance Vector with Height
Figure 12: ROC-curves for obstacle classifier.
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
Detection rate (DET)
False acceptance rate (FAR)
Best DisparityMap
Best DepthMap
Best Distance Vector
Best Distance Vector with Height
Figure 13: ROC-curves for direction classifier.
ity of the classifier. The curve ideally arises vertically
up on the left. So the curve forms a square of area
1 with the coordinate axes. The area under the ROC
curve serves as a criterion for the improvement of the
adjusted parameters. The more this value reaches 1,
the better a separation into the two classes is possible.
Like the obstacle classifier, the direction classifier
uses the ROC method to optimize the parameters.
Based on sample images correct classified pictures of
the class ’turn left’ lay over wrongly assigned pictures
of the class ’turn right’.
Despite all improvement some pairs of images
from the sample are still categorized falsely. Exam-
ining more closely these images makes clear, that the
majority of wrong classified samples are quite prob-
lematic. Some pictures are almost without any light-
ing. Furthermore reflecting surfaces or images with
sparse texture (for example white walls) cause cer-
tain difficulties. The main problem however lies in
the cameras mounted parallel to the ground. Since
they are fixed at the height of 80 cm smaller objects
on the floor are not in the field of view and therefore
Figure 14: Examples of wrong classified images.
Problem with glass door
Start / End
Obstacle
Figure 15: Travel through a building.
cannot be detected. During the generation of test data
by means of a mouse control the evade of these ob-
stacles is guaranteed by the supervisor. But these ob-
jects are not seen within the image. So the classifier
is not able to make the right decision. For this reason
the cameras should be operated looking to the ground.
Figure 14 shows some examples of wrong classified
images.
5 CONCLUSION AND OUTLOOK
Figure 15 represents as an example a travel of the ro-
bot through our institute building. The best classi-
fiers are used. Problems occured only in front of glass
doors.
In order to make the system more robust, the cam-
eras should be installed with view to the ground. The
optimum would be a mobile camera head. Its ad-
justment could be included in the feature vectors too.
Thus also smaller objects could be detected such as
legs of a chair or boxes standing on the floor. At the
current setup smaller objects disappear when moving
STEREO IMAGE BASED COLLISION PREVENTION USING THE CENSUS TRANSFORM AND THE SNOW
CLASSIFIER
453

towards them in critical distances.
Furthermore sequences with different lighting con-
ditions or shades could be generated to consider these
influences particularly. Also a speed control could be
installed by mapping the score differences of the ob-
stacle classifier. The robot could accelerate if no ob-
stacles are seen and slow down if objects are near. At
collisions an image sequence could be saved to retrain
and improve the classifier after the event.
REFERENCES
D.M. Gavrila, J. G. and Munder, S. (2004). Vision-based
pedestrian detection: The protector system. Daimler
Chrysler Research , Ulm.
Kohtaro Sabe, Masaki Fukuchi, J.-S. G., Ohashi, T.,
Kawamoto, K., and Yoshigahara, T. (2004). Obsta-
cle avoidance and path planning for humanoid robots
using stereo vision. Sony Corporation, Tokyo.
Libuda, L. and Kraiss, K.-F. (2004). Identification of nat-
ural landmarks for vision based navigation. Technis-
che Universit
¨
at Aachen.
Masako Kumano, A. O. and Yuta, S. (2000). Obstacle
avoidance of autonomous mobile robot using stereo
vision sensor. University of Tsukuba.
Reid Simmons, Lars Henriksen, L. C. and Whelan, G.
(1996). Obstacle avoidance and safeguarding for a lu-
nar rover. Carnegie Mellon University.
Ruhr-Universit
¨
at, B. (1997). Arnold, ein autonomer
service-roboter. http://www.neuroinformatik.ruhr-
uni-bochum.de/ini/PROJECTS/NEUROS/ff97-
katalog/arnold
d.html.
Yang, M.-H., Roth, D., and Ahuja, N. (2000). A snow-
based face detector. In Advances in Neural Informa-
tion Processing Systems 12 (NIPS 12), pages 855–
861. MIT Press.
ICINCO 2005 - ROBOTICS AND AUTOMATION
454
