
MULTI-ROBOT SOFTWARE PLATFORM BASED ON ROBOTIC
DEVICE SERVER PLAYER
Alejandro Morales, Miguel A. Gutiérrez
Depto. de Informática y Ciencias de la Computación, Universidad Católica de Ávila, Ávila, Spain
Jose A. Vicente, Vidal Moreno, Belén Curto
Depto. Informática y Automática, Universidad de Salamanca, Salamanca, Spain
Keywords: Software Platform, Architectures, Distributed System Control, Autonomous, Mobile, Robots, Environment
.
Abstract: This article describes a software platform that allows to control multiple robots of any type, through
wireless connections and without needing to modify its code to control each particular robot. It is a platform
with an architecture in three layers, that uses the robotics device server Player as intermediate layer. The
most abstract layer of the architecture is composed by the applications of control elaborated in any language
that has socket support. These applications use the interfaces that Player offers to the control of the devices,
so that the access to it is transparent. A server application is the most specialized layer that runs on the
robot, and it manages the sensors and actuators devices of the robot at Player’s requests. The platform
presents two interesting aspects, the first is that allows to control any robot, without having to develop
specific drivers in Player that allow to control their devices. That is to say, it is not necessary to modify the
code of the platform to integrate a new robot, simply it is necessary to adapt a model of server application,
which accedes to the devices, to the robot that is wanted to integrate. The second one, is the possibility of
controlling multiples robots simultaneously through wireless connections (also it admits serial connections).
Also, it allows to create valid control programs for any robot, without needing to know its operation and
architecture. By these reasons, it constitutes a very valid enviroment to work with multi-robot distributed
systems.
1 INTRODUCTION
One of the complex aspects at the time of working
with multi-robot systems is the software
development. This is because in many cases robots
have different devices and architectures, which
forces to create specific drivers for each device and
to elaborate exclusive programs, that make use of
those drivers, adapted to each particular robot.
At the moment, software tools exists that try to
simplify the creation of control programs for the
handling of the robotic devices. Some are distributed
under license and only allow to work with robots of
the company that distributes them, others only allow
the control of one robot simultaneously. Shapira
(
Saphira robot control system) and Ayllu (Werger, 2000)
are two examples, that are distributed under license
by ActivMedia (ActivMedia Robotics) and they only
allow to work with robots Pioneer.
CARMEN (Carnegie Mellon Robot Navigation
Toolkit) is another tool, in this case open source,
composed by a set of servers applications who
simplify the control and navigation of mobile robots.
Another example is Player (Player/Stage
Project), that tries to simplify the software
development, to handling multiple robots of any
type (Gerkey, 2003). It is an open source robotic
device server that supplies through the network and
in a transparent way for the control programs
(clients) which interact with it, a control of the
devices (sensors and actuators) that have the robots.
It offers a set of device interfaces that the robotic
control programs use to interact, through it, with the
robot devices.
Player establishes a distinction between the
interface of a device and the drivers of the same one.
The reason is that an only interface for all the
devices of the same type exists. That is to say,
Player implements a set of drivers, one for each
435
Morales A., A. Gutiérrez M., A. Vicente J., Moreno V. and Curto B. (2005).
MULTI-ROBOT SOFTWARE PLATFORM BASED ON ROBOTIC DEVICE SERVER PLAYER.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 435-438
DOI: 10.5220/0001179604350438
Copyright
c
SciTePress

particular model of a certain device, and associates
all of them to a same interface. In that way the
control programs can interact with a device, using
their interfaces, without having to know the
particular characteristics of its driver. For instance:
there is only one interface ‘position’ that allows to
control the movement devices of any robot, and it is
implemented by some drivers (one by each concrete
device that allows to control) adjusted to this
interface.
Player provides already implemented a set of
drivers that allows to control commercial devices of
some robots (Pioneer 1, Pioneer 2, AmigoBot, RWI
B-series robots...). But if you want to use it to
control robots of own creation, or other ones that are
not between the implemented ones, it is necessary to
develop and implement a new specific driver for
each device of the robot, as each robot has its own
characteristics of hardware (microcontroller), system
media, etc.
Player can be executed in the most of the
UNIX/LINUX systems. It allows controlling
multiples devices and it offers the possibility of
modifies its code to add news drivers and/or device
interfaces.
Control programs (clients) communicate with
Player across a socket TCP, asking for data of the
sensor devices, sending command to actuators and
configuring devices. Player server admits multiples
clients connected at the same time, one by socket,
and these don’t have to be in the same machine,
simply they should be executed on a computer
located in the same network that the server. As well
as client programs can be written in any language of
programming that provides socket.
A very interesting aspect is the control of
multiple robots using TCP/IP wireless connections,
because they offer a greater operational range and
allow to control from an only PC (or robot), that is
in the same network, all robots. The problem is that
to do this with Player, we would have to execute an
instance of Player in each robot, something that in
most of robots is not possible (because they need to
have installed an operating system type
UNIX/LINUX). The reason is that drivers of Player
access, normally through serial connections, directly
to the devices and that is not possible using TCP/IP
connections. The software platform that we propose
allows to control multiple robots using only an
instance of Player, that can be executed in a PC of
the network or in a robot, and it does not need that
robots has a great capacity of processing: it can be
minirobots like K-team robots (Khepera robots).
In the following sections of this article the
proposed software platform is described, its
architecture, and conclusions.
2 PROPOSED SOFTWARE
PLATFORM
The software platform that we propose uses Player
as its intermediate layer and is thought to control
multiple robots of any type, through wireless
connections and without needing to modify its code
to control each particular robot.
It tries to facilitate complex aspects such as the
necessity to create a new driver for each device that
you want to control. Also it allows to control the
devices through TCP/IP connections.
In order to avoid having to create a new driver in
Player for each new device that we want to control,
we have developed a generic driver for each generic
type of device (one to sonar, other to IR, another one
for position, another one for battery...). These
generic drivers don’t have access directly to the
devices, it is done through a server application, that
is executed in the robot control module. The
communication between generic drivers and the
server application makes use of an own protocol and
it is possible to be made through wireless
connections.
This way to work is going to allow us to control,
without needing to add new exclusive drivers to
Player, any type of robot that incorporates the server
application model that we propose. In this way, it is
the robot that has to adapt to the software platform
and not this one to each particular robot.
The platform allows to control multiple robots
from an only PC (or robot), through a wireless
network, being able to execute the control programs
in any PC of the network.
2.1 Platform Architecture
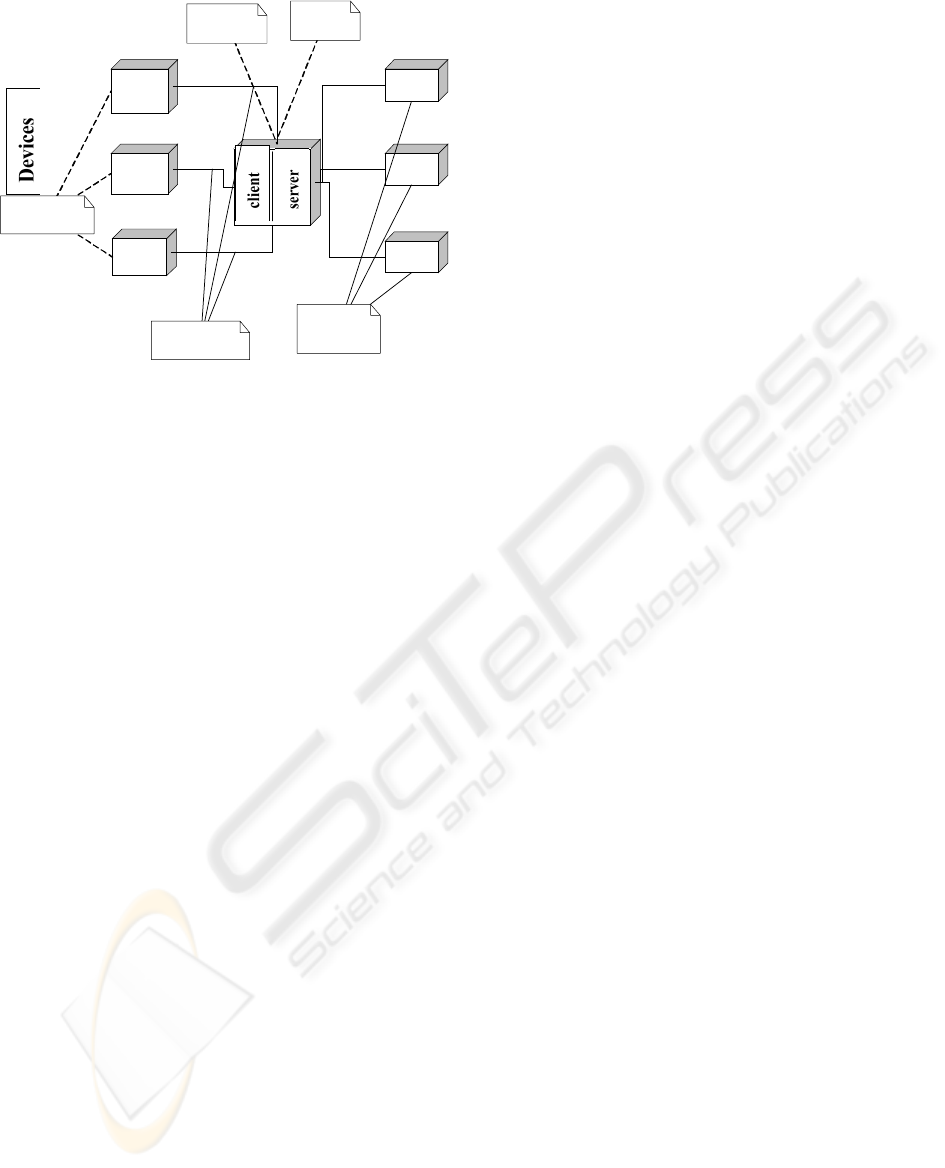
It is an architecture in three layers (see figure 1).
The top layer is composed by the control
applications elaborated in any high-level language.
These applications communicate, making use of the
interfaces and through TCP socket, with the
intermediate layer (Player).
The lowest layer is composed by a server
application which is executed in the control module
of the robot, and has access to the robot devices. The
communication between the server application and
Player is made by TCP socket, following an own
protocol (see figure 3).
Both Player and server application of the robot
support multiple connections, so a control
application can work on several robots
simultaneously.
ICINCO 2005 - ROBOTICS AND AUTOMATION
436
2.1.1 Server Application
This server application has been designed to control
a large number of devices simultaneously and allows
to add new devices in a simple way. It is
implemented easily to its integration in any kind of
control module.
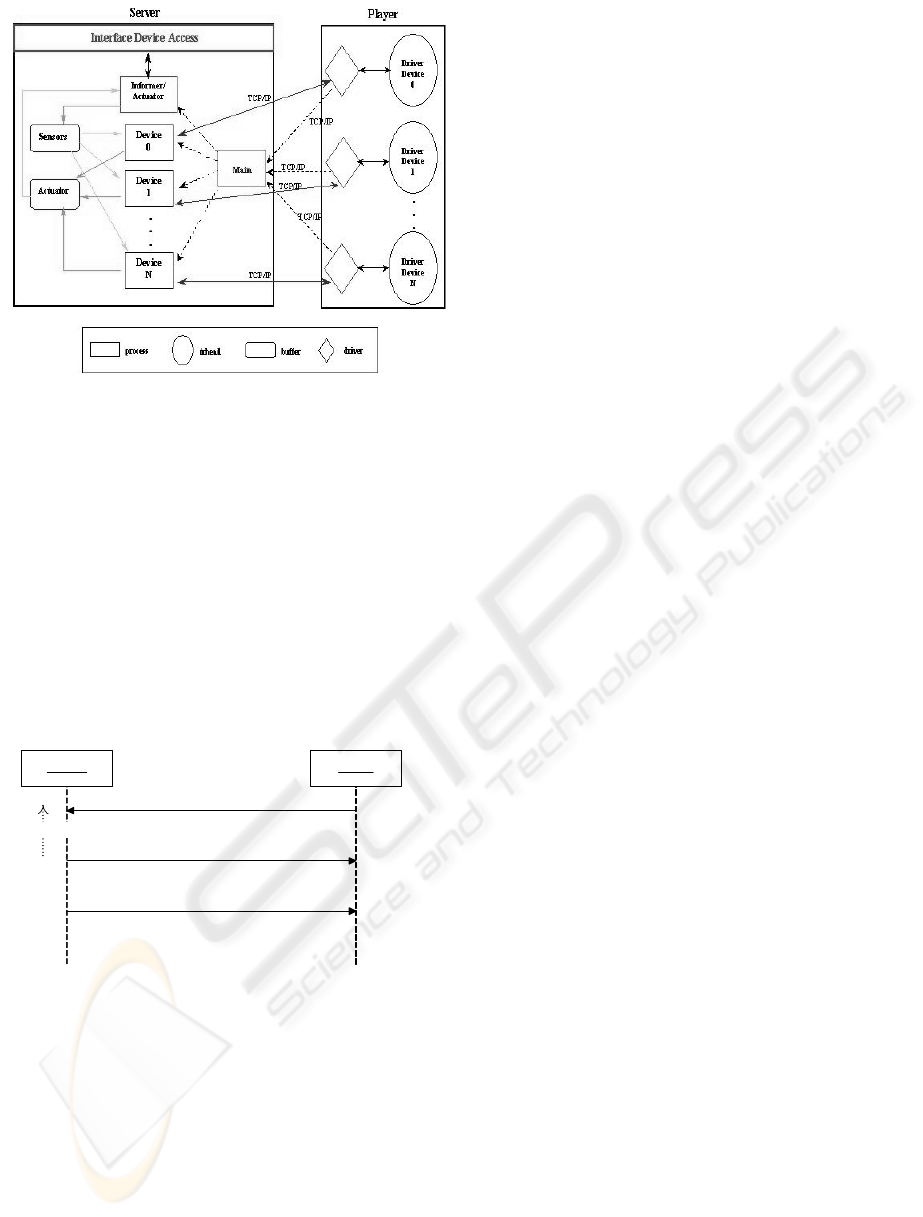
It is a matter of an application whose mission is
to take care of requests of Player towards the
devices. It is a multiprocess application because
Player makes simultaneous requests on multiple
devices, and it maintains a process taking care of the
requests that Player makes on each one of them (see
figure 2).
The different types of process are the following
ones:
- a main process that is the one in charge of
creating and finalizing the rest of the process,
as well as taking care of the new connections
made from the client part (generic drivers of
Player).
- a process in charge of making readings of the
sensorial devices and acting on the actuators
devices.
- a set of process in charge of taking care of
generic requests of reading and actuation made
from generic drivers.
Two clearly differentiated parts can be
emphasized. The first one manages the processes
and takes care of requests of Player, following a
communication protocol. The second one, makes the
access to the devices or reads the value of the
sensors or acts on the actuators (see figure 2). This
division allows that the incorporation of new devices
is as simple as it is possible.
The functions that communicate with the devices
are encapsulated in a library, offering an interface to
access them. In this way the server application can
be adapted to any robot modifying only the
functions of control and it is not almost necessary to
modify the application.
In order to avoid concurrence problems when
different processes accede to devices at the same
time, it is necessary to use two buffers. One of them
will store the reading sensors values and the other
are the values for the actuators. In this way all
processes will have access to sensor values, and will
be able to act on actuators through buffers, without
having to accede directly to the devices.
There will be an only process that is in charge to
accede to the devices, through the interface, storing
the reading sensors values in its buffer, and reading
the buffer values of actuators to act on them. (See
figure 2).
The server application communicates with
Player through an own protocol on TCP/IP and it
can interact not only with Player but with any
another control program that respects the
communication protocol established.
2.1.2 Generic Drivers Implemented in Player
As it was indicated previously in this architecture,
Player acts as client requesting information and
acting on the devices through the server application.
Drivers are the Player part in charge of acceding
to devices. To avoid having to create a new driver
for each device that we want to control, we have
created a generic driver for each type of device.
These generic drivers will be the clients,
communicating with the server application through
an own protocol (see figure 2).
In contrast with what happens with drivers of
devices that Player possesses, these we have created
serve for any device of that type. For instance:
sonar’s driver serves for any number and type of
sonars.
This working method allows integration in
Player robots that use the model of server
application previously described and respect the
communication protocol with generic drivers,
without needing to modify Player.
2.1.3 Protocol between generic drivers and the
server application
The communication between generic drivers and the
server application is made following a simple
protocol through TCP socket, that is described next.
In the first place generic driver sends a byte,
indicating if it wants to finalize the server, the
connection or to what device it wants to accede.
Figure 1: Layers of the software platform
Control
Program1
Control
ProgramN
Control
Program2
Player
Server
Aplication
Robot1
Server
Aplication
RobotN
Server
Aplication
Robot2
<<TCP/IP>>
<<TCP/IP>>
<<TCP/IP>>
<<TCP/IP>>
<<TCP/IP>>
<<TCP/IP>>
serial connection
it can be
executed in
a PC or Robot
Player run
like a client
and server
own comunication
protocol
writed in some
language that
supports TCP
socket
MULTI-ROBOT SOFTWARE PLATFORM BASED ON ROBOTIC DEVICE SERVER PLAYER
437
If the device is sensorial (see figure 3), the server
responds with a byte indicating the number of units
of that device that the robot has and next it sends the
set of values of all of them, each one of those values
will go in one or two bytes, depending on the data
type that are (character, integer number...).
In case of being an actuator device, the generic
driver sends, after the first byte, another one
indicating on which units of that device wants to act
and next the values of these. If an error happens
while the values are sent, these are sent again.
3 CONCLUSIONS
Our intention has been to create a software platform
that allows to integrate new robots in a simple way,
that facilitates the creation of control programs of
the robotic devices and that allow to control robots
of distributed way through a wireless network.
It is thought to work on a set of robots, that can
have different architectures and devices.
The platform has been designed so that
integration of robots does not imply modifying its
code. The creation of control programs is made
using a set of simple interfaces of devices.
It allows to control, through wireless
connections, the devices of any robot that adapt and
execute the server application that we propose.
Robots does not need to have hard processing
capacity, simply must support wireless connections.
It constitutes a very useful tool to facilitate the
work with multi-robot systems in distributed
environments.
Making use of it, robotic control programs of a
very simple way can be created, since the access to
the devices of robots is transparent for the
programmer. In addition, the programs can be
implemented in several high-level languages and to
control one or several robots simultaneously,
through a network.
Also the wireless communication between its
three layers improve the operational range with
respect to the serial connections, and allows to
control multiple robots through an only access point
to the network.
The platform has been tested on a set of mobile
robots, some commercial and others of own creation,
developing applications that allow the cooperation
of robots and the control of them simultaneously
through wireless connections.
REFERENCES
ActivMedia Robotics, http://www.activmedia.com/
B. Gerkey, R. Vaughan, A. Howard, ICAR 2003.The
Player/Stage Project: Tools for Multi-Robot and
Distributed Sensor Systems.
B. B. Werger, 2000. Ayllu: Distributed port-arbitrated
behavior-based control.
Carnegie Mellon Robot Navigation Toolkit,
http://www-2.cs.cmu.edu/~carmen/
Khepera robots,
http://www.k-team.com/robots/khepera/
Player/Stage Project, http://playerstage.sourceforge.net
Saphira robot control system,
http://robots.activmedia.com/archives/saphira-users/
Server Client
Command
{if not finalice}
Number device instances()
Device Values()
Figure 3: Protocol between server application and
generic driver of a sensor device
Figure 2: Architecture of the software platform
ICINCO 2005 - ROBOTICS AND AUTOMATION
438
