
IDENTIFICATION OF STRUCTURE IN NONDETERMINISTIC
CYCLIC SOCIAL CONVENTIONS
Hürevren Kılıç
Department of Computer Engineering, Atılım University,Kızılcaşar Köyü Incek, Gölbaşı, Ankara, Turkey
Keywords: Social conventions, S
ystem modeling and identification, Time series.
Abstract: A polynomial-time algorithm for the identification of interaction and memory structures in discrete valued,
nondeterministic, cyclic social behavior data is developed. The output of the probabilistic search algorithm
is the strategy update function for each individual automaton agent in given population. For our modeling
purpose, we used automata networks model and added “block-extended memory” property to its original
definition. The approach can also be considered as a limit cycle construction technique for discrete
dynamical systems.
1 INTRODUCTION
Understanding the nature of social conventions in
human (or agent) societies may contribute to
obtaining more natural and better design forms in
synthetic (or in virtual) environments. The study on
social conventions is not new (Ullman-Margalit,
1977), but it is relatively new in the context of
artificial intelligence and multiagent systems
(Walker and Wooldridge, 1995); (Shoham and
Tennenholtz 1997); (Coen, 2000); (Delgado, 2002).
“A social law is a restriction on the set of actions
available to agents. If it restricts the agents’ behavior
to a particular action (or strategy) it is called social
convention” (Shoham and Tennenholtz, 1997). From
this definition, one may conclude that the existence
of a social convention generated by an agent
population requires all agents to reach (or converge)
to the same state at time t. On the other hand, some
social interaction forms may contain repetitive
patterns of individual and/or collective action
(strategy) choices while they may never evolve into
a mature social convention form at all. Such time-
distributed, nondeterministic, cyclic regular behavior
converging to a limit cycle of some length k >1 can
still be a solution to recurrent coordination
problems. From the game-theoretic perspective, they
are the collection of interacting meta-strategies
enabling some intended flexible strategy changes.
The identification of interaction topology (or
neighborhood structure) among such agents
producing what we call, cyclic social convention (or
timed social equilibrium) behavior may provide
useful information feedback for possible online
emergent design solutions. And, the mechanisms
producing them are worth to be investigated.
Automata Network (AN) is a useful
m
athematical model for analyzing such global
dynamics emerging from collective behavior of local
components (Aspray and Burks, 1987).
Identification of an AN that can generate given
arbitrary collective behavior sequence problem is a
typical inverse problem (Wolfram, 1984). In this
paper, we used a modified AN model in which the
automata components (i.e. agents) are not
memoryless. By this way, the model fits better into
our cyclic social convention definition. The inverse
problem has been worked on different research
domains by using different subclasses of the
Automata Networks model like cellular automata,
non-uniform cellular automata and Boolean
networks (Langton, 1986); (Adamatzky, 1994);
(Akutsu et.al., 2000); (Ideker et.al., 2000). In
(Ideker et.al., 2000), it was pointed out that the
inverse problem of finding minimum neighborhood
automata network that can generate given
deterministic sequence can be considered as the NP-
Complete problem of set-covering (but without
giving a formal proof). In (Fitoussi and Tennenholtz,
2000), it has been proven that the “automatic
synthesis of social laws” problem is NP-Hard. In this
paper, our aim is not to find an agent interaction
topology with minimum interaction neighborhoods
but to identify a topology by using apriori
knowledge about the relation between the
neighborhood and memory parameters of the
355
Kılıç H. (2005).
IDENTIFICATION OF STRUCTURE IN NONDETERMINISTIC CYCLIC SOCIAL CONVENTIONS.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Signal Processing, Systems Modeling and
Control, pages 355-359
DOI: 10.5220/0001175903550359
Copyright
c
SciTePress

system. Simply, the neighborhood/memory relation
is represented in the form of a binomial distribution
function. For our AN identification purpose, we
proposed a probabilistic search algorithm called
Nearest Neighbors Recent Values (NNRV) that
enables the generation of arbitrarily given discrete-
valued, nondeterministic, cyclic behavior sequence.
Note that the approach does not consider any
optimization criterion and for the same sequence
data one may obtain different topologies. However,
the obtained topologies show the general
characteristics defined by given binomial
distribution function.
Section 2 includes formal definition of our
modified AN model. Section 3 describes the NNRV
identification algorithm. Section 4 is the conclusion.
2 THE MODEL
Let I be a finite set of vertices. An automata network
can be defined on I as a triplet A = (G, Q, (f
i
: i
∈
I ))
where
• G = (I, V) is a graph showing the interaction
topology between vertices where
I
I
V
×⊂
. A finite neighborhood is
defined as V
i
= {j
∈
I : (j, i)∈V} for any
i
∈I. The neighborhood system is defined by
V = {(j, i) : j
∈V
i
, i
∈
I}.
•
is the finite set of states.
Q
• f
i
: is the state transition function
for vertex i. Here, the f
QQ
i
V
→
i
function determines
the next state of i from the current states of
the neighbors of i. The global transition
function F :
is defined on the set
of configurations Q
II
QQ →
I
with synchronous
updates (Goles and Martinez, 1990).
Synchronous update requires all vertex values to
be updated simultaneously. The dynamics of
synchronous update can be given by x(t+1) =
F
(x(t)) whose component is x
A
th
i
i
(t+1) = f
i
(x
j
(t) :
j∈V
i
).
The above definition can be extended to an
automata network with block extended memory. For
this purpose, we need to redefine the strategy update
function f
i
. For a given j∈V
i
, let P
ij
= q
1
q
2
…q
s
…q
l-
1
q
l
be a finite sequence of state values of length l
where l ∈N
+
and q
s
∈Q for all 1 ≤ s ≤ l. Then, the
size of the memory pattern for vertex i is
Z
i
= ∑P
ij
where j takes values from 1 to |V
i
|.
The state transition function for vertex i using
“block extended memory” is f
i
: . As a
consequence, the dynamics of the
component in
synchronous update mode becomes:
QQ
i
Z
→
th
i
x
i
(t+1)=f
i
(x
j
(t), x
j
(t-1), x
j
(t-2)……x
j
(t-|P
ij
|+1):j
∈
V
i
)
In the context of interacting social agents, the set
Q defines agent strategies; V
i
is the set of agents in
i
th
agent’s interaction neighborhood; and f
i
is the
deterministic strategy update function for the i
th
agent which may not necessarily be the same for all
agents. One can recognize the existing redundancy
in the accounting of the memory usage. Each
neighbor of say automaton j has the history j
accounted in its memory usage. It is necessary due
to the private nature of observations made by
independent autonomous automaton agents.
However, it should be clear that the agents are
assumed to cooperate (but not compete) in sharing
their private history information.
Definition 1. A cyclic sequence S with period T
is an ordered list of global configurations, S = x(0),
x(1), …, x(s), … where s
∈
N, x(s)∈Q
I
and x(s) =
x(s mod T).
Definition 2. A cyclic sequence S with period T
is nondeterministic iff there exists s, t
∈N and 0 ≤
s < t < T such that (x(s) = x(t))
(x(s+1) ≠
x(t+1)) holds, otherwise it is deterministic.
⇒
Lemma 1. There exists a nondeterministic cyclic
sequence S with period T such that one cannot find
any automata network A working in synchronous
update mode and without using block extended
memory (i.e. |P
ij
| = 1 for all j ∈ V
i
and i∈I ) that
can generate S.
Proof. Let x(s), x(t), x(s-1) and x(t-1) be
configurations in sequence S where s≠ t, x(s)≠x(t)
and x(s-1)=x(t-1). Then, there exist at least one
vertex i of A such that x
i
(s)≠x
i
(t) and x
i
(s-1)=x
i
(t-1).
However, x
i
(s)≠x
i
(t) implies f
i
(x
j
(s-1): j∈V
i
) ≠
f
i
(x
j
(t-1): j
∈
V
i
) which contradicts with the existence
of x
i
(s-1)=x
i
(t-1) for all i
∈
I.
An implication of Lemma 1 is the existence
cyclic social convention forms that cannot be
generated by reflexive, memoryless society of agents
that are updating their strategies synchronously. A
simple example binary-valued, nondeterministic
cyclic sequence showing this fact is: 00Æ00Æ10
where T=3. If there is no such memory usage
restriction on agents, any such arbitrarily given
cyclic sequence can be generated.
Lemma 2. Given a nondeterministic cyclic
sequence S with period T, one can always find an
automata network A working in synchronous update
mode and with block extended memory size of at
most O(T
2
|I|
2
) that can generate S.
Proof. Simply, the cyclicity of the sequence
provides a memory of size T for each individual
automaton agent and this makes the generation of
the given nondeterministic sequence trivial. The
upper bound for memory usage can be reached if the
network A is fully connected. In this case, each state
transition rule of the strategy update function
i
of
the i
f
th
agent uses the whole pattern information,
ICINCO 2005 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
356
T*|I|, of the sequence S. This implies O(T
2
*|I|)
amount of memory per agent and O(T
2
*|I|
2
) in total.
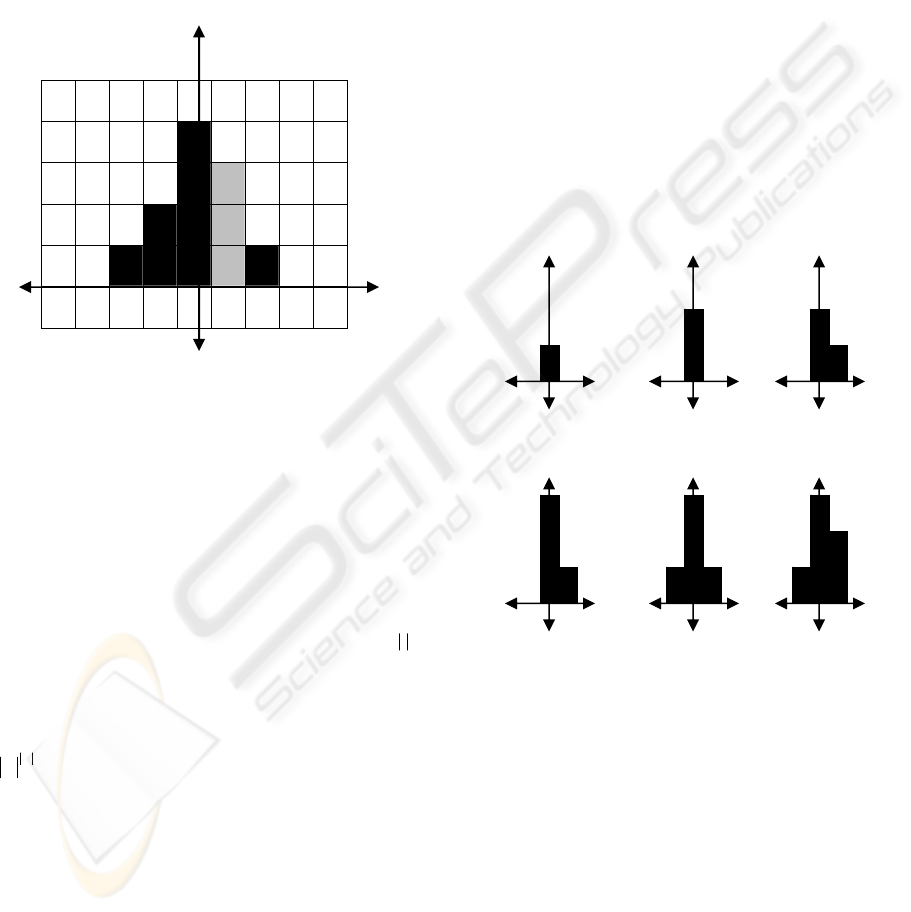
In Figure 1, one can see an example
neighborhood/memory pattern for an individual
automaton i. The horizontal axis defines neighbor
vertices of vertex i (including itself). The vertical
axis, on the other hand, defines the memory patterns
used by vertex i. The gray-colored column P
(i),(i+1)
is
the memory pattern generated by vertex (i+1) and
used by vertex i. From Figure 1, P
(i),(i+1)
= 3, |V
i
| = 5
and the total size of memory patterns for i: Z
i
= 11.
Figure 1: A neighborhood/memory pattern for an
automaton i
3 THE ALGORITHM
Before describing the algorithm, we may need to
figure out the number of possible automata network
neighborhood topologies and potential individual
automata definitions to be searched. Since the
system has |I| number of automata, the number of
possible network neighborhood topologies is:
2
2
I
.
An automaton i with our block extended memory
definition has |Q| states and decides on its next state
by looking at Z
i
size memory pattern. Then, the
number of possible fully-defined automaton for i is:
i
Z
Q
Q
. The search space size is huge and one can
find more than one different automata network
definition that can generate the given
nondeterministic cyclic sequence. Different
solutions are characterized by how individual
conflicts (defined below) are handled by the
algorithm. Note that each resolved conflict requires
some extension on memory pattern of the automaton
which implies an evolution of possibly partially-
defined automaton. The evolution occurs only on
G’s connection topology and on the state transition
rule space (i.e. f
i
). The states (q∈Q) and the number
of automaton (|I|), on the other hand, are fixed.
Definition 3. Let A(t) be a partially-defined
automata network at time t. Then, the next state
value required to be generated by automaton i of A(t)
is x
i
(t+1). Let P
i
be a memory pattern value valid at
time t. If there exist a state transition rule P
i
Æ q
(where q
∈
Q) defined by f
i
at time t such that
q≠x
i
(t+1) then we say that reading x
i
(t+1) causes an
individual conflict for the automaton i at time t.
In our approach, individual automaton conflicts
can be resolved by neighborhood extension and/or
through memorization. Neighborhood extension can
be thought analogous to increase of cooperation
among ordered automaton units. Then, the
cooperation/memorization structure of an automaton
i can be defined by movements in neighborhood
and/or memory directions of a 2-D memory pattern
space. Figure 2 shows an example time evolution for
memory pattern P
i
of an automaton i.
“Does automaton agent need to the others for
generating its local sequence data?” As can be
drawn from Lemma 2, the answer is: No, because
given sequence S is cyclic. In other words, when V
i
= {i} for all i
∈
I heand |P
ij
| = T for all j∈V
i
, t cyclic
sequence S can be generated without any agent
cooperation. Nevertheless, an automaton with
bounded memorization ability may achieve its
sequence generation task through cooperation. But
this time, generation of S cannot be guaranteed.
Remember the amnesia case when |P
ij
|=1 for all
j
∈
V
i
. As a result, if an automaton agent does not
Memory
Interaction
Neighborhood
Automaton agent i
t=2 t=3
t=1
t=4
t=5 t=6
Figure 2: An example memory pattern evolution
IDENTIFICATION OF STRUCTURE IN NONDETERMINISTIC CYCLIC SOCIAL CONVENTIONS
357

prefer cooperation then it should be able to
memorize the old.
What can be a more realistic representation of
automaton neighborhood/memorization structure?
The answer depends on the characteristics of the
generator of sequence S which is wanted to be
identified. In our approach, we considered basic
space (i.e. physical distance) and time (i.e.
recentness) costs. We assumed that automaton tends
to resolve its conflicts by extending its neighborhood
to its nearest neighbors and recent values can be
remembered more easily. We implement this idea by
our Nearest Neighbors Recent Values (NNRV)
algorithm (see Figure 3). It selects the recent
memory value of the next nearest automaton to the
current one as the candidate for resolving the current
automaton’s conflict. Our implementation of NNRV
based on memory patterns showing binomial
distribution characteristics. As a consequence, the
conflict resolver selection process generated
evolving sand pile like memory patterns (see Figure
2).
The magnitude and spread values of sand piles
are upper-bounded by T and |I|, respectively. The
second input of the algorithm (i.e. p) defines the
neighborhood/memory characterization for each
automaton agent. It is the probability of using the
candidate automaton’s recent value for resolving
current automaton’s individual conflict. The
algorithm executes a probabilistic search in the
space until it resolves all conflict cases. p=1 is the
no-cooperation case where the automaton tries to
resolve its conflicts by itself. In other words,
memory pattern is extended only in memory axis
direction of the current automaton. When p is close
to zero, the automaton mostly prefers cooperation to
memorization. In this case, the spread of the
distribution is dominant over its magnitude. In the
algorithm, we assumed that the p value does not
change by time and it is the same for all automaton
units.
ALGORITHM NNRV
Input:Nondeterministic Sequence (S),
Binomial Dist. Prob. (p)
Output: Automata Network (A)
Initialize: For each column of S,
establish one automaton of A with
initially empty state transition rule
set;
For each automaton i of A {
Our approach can also be considered as a general
purpose limit cycle construction technique for
discrete dynamical systems. However, one may need
to find more realistic memory formation models. For
such purpose, he/she may need to consider
domain/problem specific characteristics of the
sequence data.
P
i
(0) = x
i
(0);
For each config x(j) of S where j > 0
For each config x(k) of S from x(0)
to x(j-1)
if ( x
i
(j)!=x
i
(k)) then
while (P
i
(j)==P
i
(k)) {
Find i’s next Nearest
Neighbor’s most Recent
“not memorized yet” Value
x
m
(r) with probability p;
Extend P
i
using x
m
(r);
}
if P
i
is extended then
extract state transition rules
for automaton A
i
from S using P
i
}
Figure 3: Pseudo-code for the NNRV algorithm.
Let m=T (cycle period) and n=|I| (# of automata).
Then, the worst-case time complexity of the above
algorithm can be defined as: [O(m
2
n) for the For
loops]*[O(mn) for checking the equivalence of
patterns P
i
(j) and P
i
(k)]*[O(mn) for conflict
resolution by extending pattern P
i
] = O(m
4
n
3
) which
is polynomial-time.
4 CONCLUSION
A new discrete-valued, nondetermistic and cyclic
social convention definition is introduced. It is
shown that the structure behind such timed social
equilibrium forms can be investigated by the use of
automata networks model. While doing this, we
added block extended memory property to the
original automata networks definition. It is shown
that for any nondeterministic cyclic sequence data,
one can find an automata network definition that can
generate it while working in synchronous update
mode using block extended memory. For our
structure identification purpose, we developed a
polynomial time probabilistic automata network
search algorithm with time complexity, O(m
4
n
3
)
where m is the cycle length and n is the population
size. The algorithm identifies an automata network
whose neighborhood/memory characteristic is
defined by the parameter (p) of binomial distribution
function. Specifically, we may conclude that the
identification can be achieved even without
cooperation between automaton agent units.
ICINCO 2005 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
358

REFERENCES
Adamatzky, A., 1994. Identification of Cellular Automata,
Taylor & Francis, United Kingdom.
Akutsu, T., Miyano, S., Kuhara S., 2000. Inferring
qualitative relations in genetic networks and metabolic
pathways, Bioinformatics, Vol 16(8), pp 727-734.
Aspray, W., Burks, A.W. 1987. Papers of John Von
Neumann on Computing and Computer Theory, MIT
Press, Cambridge Mass.
Coen, M.H., 2000. Non-deterministic social laws,
Proceeding of AAAI-00, AAAI Pres, pp 15-21.
Delgado, J. 2002. Emergence of social conventions in
complex networks, Artificial Intelligence, 141, pp 171-
185
Fitoussi, D., Tennenholtz, M., 2000. Choosing social Laws
for multi-agent systems: Minimality and simplicity,
Artificial Intelligence, 119(1), pp 61-101.
Goles, E., Martinez S., 1990. Neural and Automata
Networks: Dynamical Behaviour and Applications,
Kluwer Academic Publishers, The Netherlands.
Ideker, T.E., Thorsson V., Karp, R.M., 2000. Discovery of
Regulatory Interactions through Perturbation:
Inference and Experimental Design, Proc. of Pacific
Symposium on Biocomputing 5, pp 302-313.
Langton, C., 1986. Studying Artificial Life with Cellular
Automata, Physica D, Vol. 22, pp 120-149.
Shoham, Y., Tennenholtz M., 1997. On the emergence of
social conventions: Modeling, analysis and
simulations, Artificial Intelligence, 94, pp 139-166.
Ullman-Margalit, E., 1977. The emergence of norms,
Oxford Univ. Press, Oxford.
Walker, A., Wooldridge, M., 1995. Understanding the
emergence of conventions in multi-agent systems in
V.Lesser (Ed.), Proc. 1
International Conference on
Multi-Agent Systems, AAAI Press, pp 384-389.
st
Wolfram, S., 1984. Universality and Complexity in
Cellular Automata, Physica D, Vol. 10, pp 1-35.
IDENTIFICATION OF STRUCTURE IN NONDETERMINISTIC CYCLIC SOCIAL CONVENTIONS
359
