
SIMULATING TELEROBOTICS BY CELLULAR TELEPHONY
Rodrigo Montúfar-Chaveznava, Crisóforo Paisano
Computer Science Department,INAOE, Luis Enrique Erro 1, Tonantzitla,Puebla, Mexico
José María Cañas
Robotic Labs (GSyC), ESCET, Universidad Rey Juan Carlos, C/Tulipán s/n, Móstoles, Madrid, Spain.
Keywords: Telerobotics, GS
M, Simulation, Cellular telephony.
Abstract: In this work we present a simulation system to control a mobile robot using a cell phone. We exploit the
cellular telephony technology to communicate and command a robot provided with a modem in a simulation
environment. The system considers telerobotics can be performed using phone tones or sending text
messages via SMS. Due the cellular telephony is expensive, the simulation system give us the possibility to
experiment infinitely this novel way of telerobotics without expending a lot of economical resources. We
design all components required for a basic cellular telephony system and we employ a robotics simulator for
the Pioneer mobile robot, expecting to translate the system primitives to real systems in a near future. The
idea comes up due that cellular telephony has an enormous covering, and taking advantage of such situation,
telerobotics could be performed in places where wireless networking and power sources are not available at
all such as the country.
1 INTRODUCTION
Telerobotics is related to robot autonomy. In this
field, humans have to execute several tasks, such as
planning, world perception and manipulation. This
mean, there is somebody acting in real-time as part
of the robot control system. However, we need to
satisfy some requirements in the control system and
they are not always available, especially when we
are working with mobile robots.
Telerobotics is a response of the necessity of
carry ou
t operations where it is difficult to put a
human being due to constraints such as cost, safety
or time. Besides, telerobotics demands reliable
navigation because the environment where robots
operate is usually unknown, dynamic or unstructured
and the erratic navigation can guide us to an
unpredictable performance and system failures or
accidents. Telerobotics also requires of the efficient
generation of action commands because the success
on the task depends on the robot behavior.
Moreover, telerobotics claims for localized sensor
information, particularly when activities such as map
construction and registration are necessary.
Actually, telerobotics has extended to Internet
and it is acces
sible to almost everybody, it provides
user interfaces easy to use. However, networking is
not available everywhere, and this fact limits the
telerobotics expansion.
Considering that cellular telephony has a bigger
co
verage than Internet, the introduction of this kind
of technology in robotics is considered an alternative
to continue expanding the use of telerobotics to
places where it is considered a solution or assistance.
In this work, we present a simulation system to
carry ou
t telerobotics using a cell phone. Actually,
we have not found any reference about the use of
cell telephony in robotics. During the development
of the work, we have considered all aspects related
to communication in cellular telephony and we have
considered the use of a Pioneer robot simulator, the
idea is to translate the primitives of the system to
real Pioneer robots very soon.
2 CELLULAR TELEPHONY
In last years, we have been witness of the birth and
development of wireless technologies. Cellular
telephony is the one that has had the most important
development. At the beginning, cellular telephony
was conceived for voice communication; however,
329
Montúfar-Chaveznava R., Paisano C. and María Cañas J. (2005).
SIMULATING TELEROBOTICS BY CELLULAR TELEPHONY.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 329-334
DOI: 10.5220/0001167703290334
Copyright
c
SciTePress
nowadays it is able to provide a diversity of services,
such as data, audio and video transmissions with
some restrictions. At present, we identify five
generations of development in cellular telephony
(Ibrahim, 2002).
First Generation (1G). It was designed in 1970, but
implemented until 1984. It was completely analog
and employed for voice communication.
Second Generation (2G). 2G was designed in 1980,
and introduced in 1991. It was digital instead of
analog. The 2G system employs sophisticated
coding protocols and actually is in use.
Second and half Generation (2.5G). It was
designed in 1985 and introduced in 1999. 2.5G has a
higher capacity than previous versions and employs
packetized data.
Third Generation (3G). It was designed in 1990
and implemented in 2002. 3G has the ability to
contain high voice and data convergence with
wireless access to Internet; and consequently it is
suitable for multimedia. 3G protocols produce high-
speed data transmission; they are designed for
specialized applications such as MP3 audio, video in
movement, videoconference and high-speed access
to Internet.
Fourth Generation (4G). The 4G design began in
2000 and we expect it will be totally implemented in
2010. 4G will be completely IP-oriented, with higher
capacity, multimedia and transmissions of hundreds
of megabits.
2.1 The Cell Phone
Cell phones are considered very sophisticated radios
(Yucatan, 2001). We can compare the cell phone
with the short-wave radio to figure out such
sophistication. A short-wave radio allows
communicating two persons using the same
frequency, and only a person can talk in turn.
Whereas a cell phone is dual, it uses a frequency to
talk and other to listen. A short-wave radio has 40
channels. A cell phone can use 1664 channels. Cell
phones operate in regions named cells, which can be
alternated following the phone displacement. The
cells provide a high scope to phones, considering a
short-wave radio can only transmit until five miles.
The great idea concerning cell phones is that a
region can be divided in small cells extending the
communication frequency to the entire region.
2.2 Telephone Tones
The Dual-Tone Multi-Frequency (DTMF), also
known as touch tone dialing, is employed to transmit
telephone signals over the voice frequency band.
Previous to DTMF, the telephone systems
employed a sequence of clicks to dial numbers
(pulse dialing). The clicks were the beginning or end
of a connection on the line phone, and they were
equivalent to turn on or off a switch.
DTMF was developed in Bell laboratories to use
long distance numbers and establish wireless
connections via microwaves or satellite. Encoders
and decoders were included in the terminals to
translate standard pulses in DTMF tones and vice
versa. The touch-tone system introduced a standard
keyboard. The DTFM designers considered the
possible use of phone lines for computer access, then
they included some additional keys such as # and *.
The DTMF keyboard is a 4×4 matrix, each row
corresponds to a specific low frequency, and each
column to a specific high frequency. When a key is
pushed, a sinusoidal tone is produced containing
high and low frequencies. The tones are evaluated to
determine the pressed key. Frequencies were
designed using a ratio of 21/19, which is barely
lower than an entire tone, to avoid harmonics or
natural frequencies that could appear when two
tones are transmitted. Table 1 presents the keyboard
correspondence to DTMF values (Fogelklou, 1999).
Table 1: DTMF Frequencies
1 2 3 A 697 Hz
4 5 6 B 770 Hz
7 8 9 C 852 Hz
* 0 # D 941 Hz
1209 Hz 1336 Hz 1477 Hz 1633 Hz
2.3 Global System for Mobile (GSM)
GSM has some characteristics, which makes it
different in the mobile communications universe
(Rahnema, 1993). It was created in 80’s as result of
the cooperation between many European countries.
GSM shares common elements with other mobile
communication technologies as voice and data
digital transmission, or the cellular topology. A
GSM network has three basic elements: the terminal
or cell phone, the base station and the network or
node subsystem. Additionally, there are centers of
operation established to monitor the network status.
The terminal has the subscriber identity module
card (SIM), employed to identify a terminal when it
connects to the network. The SIM gives mobility to
the user, allowing the access to the network services,
independently of the terminal or location. There is a
unique number to identify every terminal, the
international mobile equipment identity (IMEI),
which is independent of the SIM.
The base station controls the connection between
terminal and network. It is known as the cell,
ICINCO 2005 - ROBOTICS AND AUTOMATION
330

because it covers a certain geographic region. The
base station subsystem (BSS) has a base transceiver
station (BTS), and a base station controller (BSC).
Every BSS has one or more BTSs. The BTS houses
the equipment for transmission and reception and
negotiate the protocols with the terminal. There are
more BTS in urban zones than in the country, and
some times broadcast equipment is employed to
guarantee the service. The stations use digital
techniques to allow many users connect to the
network; this negotiation is called multiplexing.
The BSC manage the resources of one or more
BTSs. Some functions of the BSC are the handoff,
the establishment of the channels to be employed
and the frequency switching. The BSC establishes
the connection between the cell phone and the
mobile service-switching center (MSC), which is the
core of the GSM system.
The MSC is the network core, where a cell phone
is connected to networks such as the public switched
telephone network or the integrated services digital
network. The node where the MSC is located has
equipment to control some functions such as
security, messenger service or service collecting.
2.4 Short Message Service (SMS)
GSM provides the transmission and reception of
short text messages (SMS), where two classes are
specified: Point to point (SMS/PP) and Cell
broadcast (SMS/CB).
SMS/PP allows sending a message form a GSM
phone to another. SMS/CB allows sending one or
more messages at the same time to all GSM phones
located in certain zone. SMS/CB can have at most
93 characters, but it can link up to 15 messages to
produce a macro message. Each SMS/CB message is
assigned to a category where the information and the
language employed are classified. In this way, it is
possible to read selectively or discard the messages.
SMS is a protocol with no-connection. In fact,
during transmission, a connection between
transmission and receptor is not produced.
Sending a SMS/PP message from a GSM phone
to another is considered a two steps operation: the
message transmission from the cell phone to a
special network entity, the short message service
center (SMSC), and from here to the cell phone
receptor. The first operation is called SMS mobile
originated (SMS-MO), and the second one is called
SMS mobile terminated (SMS-MT).
SMS-MT allows the reception of text messages
containing up to 160 characters in the screen of the
GSM cell phone. SMS-MO allows the transmission
of messages containing up to 160 characters to
another GSM terminal, fax, modem or e-mail
Internet address.
The success of SMS depends, in one hand, on the
simplicity and facility to use it and, in the other
hand, on the sensation of presence in the other side
of the phone. Both factors have produced such
success, in spite of the costs and limitations in
communication.
3 ROBOT SIMULATORS
Due the novelty that robotics was sometime ago;
actually we find many definitions for robot. Some
definitions, obtained form different sources are: (1)
Machinery controlled electronically, capable to
move and execute automatically different actions,
according an established program; (2) a machine,
which apparently mimics behaviors and actions of
people; (3) a machine, which acts automatically as a
response to its environment; (4) a handful of motors
controlled by computer software; or (5) a robot is a
computer with muscles. These definitions are very
different from the original meaning of robot
(robota): force or work.
The introduction of microprocessors in 70’s
makes possible the progress in robot technology.
The modern computers provide the brain to the
muscles of mechanic robots. Nowadays, robotics is
the symbiosis between electronics and mechanics
An acceptable robot for research is not usually
cheap. It is necessary to have resources to get one or
a colony and for maintaining. A robot is not always
accessible to anyone, and when programming,
sometimes the results can be unexpected. Then,
robot simulators are a solution to overcome these
problems.
At present, the robot Pioneer (Fig. 1) is one of
the most employed, and we can have access to some
Pioneer robot simulators to tests ideas, theories,
programs and algorithms, without necessity of the
robotic body. Some of the most common simulators
for the Pioneer are:
Saphira (Konolige, 1997). It is considered a mobile
robot control architecture. It was developed for
research purposes and programming in the robot
Flakey at SRI in 1994. Saphira is divided in two
modules. The low-level routines are organized and
implemented as individual software: Aria. Saphira is
designed and supported by ActivMedia Robotics
(ActivMedia, 2005). The system is based on a set of
C++ classes. The structure of classes makes easy to
expand and develop new programs adding new
sensors when it is required. Saphira and Aria are
considered two different architectures, one
constructed over the other. Aria consists of a set of
SIMULATING TELEROBOTICS BY CELLULAR TELEPHONY
331

communication routines programmed to control the
robot from the server in a computer. The system
architecture is designed to define easily robot
applications using programs. Saphira is an open
architecture, available to everyone who wishes to
write its own control system without worries about
complexities in hardware control. Communication is
an advantage of micro-task properties and reflex of
the architecture status.
Stage/Player/Gazebo (Gerkey, 2003). Player was
developed in the Research Robotics Laboratories at
the University of Southern California. Player is a
free software; it is a multithread server of robot
devices, which provides a simple and complete
control of sensors and actions to execute in the
robot. When Player is running, the control program
client is connected to Player through a TCP socket,
and the communication is performed sending and
receiving messages translated as commands or status
information. Player is designed as an independent
language and platform. The program client can run
in any machine with network connection. The client
can be written in any language to open and control
TCP sockets. The client characteristics are available
in C, C++, TCL, LISP, Java and Python. Player is
designed to virtually support any quantity of clients.
Java Mobile Robots – JMR (Gallardo, 2003). JMR
is a client-server architecture, which can support
many robots. The robots are identified by an
independent name. JMR can run different processes
in any robot, and connect to the Saphira simulator to
communicate to a real robot. The client controls
devices such as sonars and cameras; it also controls
speed and reads the distance from the robot to any
obstacle; it is also possible to know the robot status,
and we can dictate the distance to travel and the
degrees to rotate. The server receives and simulates
the commands sent by the client. In the server we
can load the worlds where the robot will navigate,
and read the images captured by the robot cameras,
such images can be sent to the client and displayed.
Figure 1: The holonomic robot Pioneer 2DX
4 THE SYSTEM SIMULATOR
The system (Fig. 2) consists of the mobile robot
simulator (SimRobot), corresponding to a modified
version of JMR, and the basic GSM cellular
telephony simulator (SimGSM). SimGSM has three
modules: the GSM cell phone (M1), the GSM
modem (M2) and the SMS/Phone center (M3).
Figure 2: The SimGSM system
M1 is employed to communicate and control the
robot via the telephone network. The robot control
can be performed sending/receiving text messages or
tones. M2 is employed for communication and it is
attached to a specific robot in the JMR environment.
M3 receives and re-sends text messages and
establishes the connection between modules in the
telephone network.
4.1 Communication by tones
First, the connection is stablished dialing, from M1,
the number attached to M2. M3 determines the
connection. Once the connection is established, we
can send commands (sequences of tones) from M1
to SimRobot through M2, which is provided with a
command verifier (VeriCommand) to validate the
orders. If the command is correct, it is re-sent to
SimRobot where the robot executes the action.
The commands are defined as a sequence of
tones:
** Start/end command.
#**n Robot moves forward n centimeters.
#*#n Robot turns n degrees clockwise.
For example, to move the robot 20 cm forward,
we send the sequence: ** #**20 **
The robot status is always checked previous to
execute any command. The possible states are:
Collision: The robot has collided.
Moving: The robot is moving.
Stopped: The robot and motors are on, but it is
stopped.
No motors: The robot is on, but motors are off.
Disconnected: The robot is off.
If the status is No motors or Disconnected, then
the commands cannot be executed. If the status is
Collision, then it is only possible to execute turns. If
ICINCO 2005 - ROBOTICS AND AUTOMATION
332
the status is Stopped then any command can be
executed.
M2 can send tones to M1 depending the status of
the system, the tones are:
1 The connection is accepted.
2 The connection is denied.
3 The command has been executed successfully.
4 The robot has collided.
5 The robot is in an infinite loop.
6 The robot is executing a command.
4.2 Communication by SMS
The commands are written as a text message,
following the rules dictated for tone communication.
We employ the messages screen in M1. Once the
message is written, we send it providing the phone
number attached to M2. The message is processed in
the SMS center and re-sent to M2. When M2
receives the message, it is verified. If the command
in not valid, then M2 constructs an error message,
which is sent to M1. If the command is validated,
then it is passed to SimRobot and the robot executes
the order.
5 MODELING THE SYSTEM
We employ UML as a tool to develop the system.
UML determines a set of notations and diagrams to
model object-oriented systems and describe the
essential semantic respect the meaning of symbols
and diagrams (Popkin, 1998). UML is used to model
many kind of software and hardware systems, and
the real world organization.
We consider four stages to model SimGSM: (1)
Analysis, (2) Design, (3) Implementation and (4)
Testing.
The stages include a set of UML diagrams.
Analysis includes the diagrams of (1) Situation and
(2) Classes. Design comprises (1) Classes (detail),
(2) Sequence, (3) Interaction, (4) Status and (5)
Activities. Implementation has only the Members
diagram. Finally, the black box method was
employed for Testing.
6 THE OPERATION
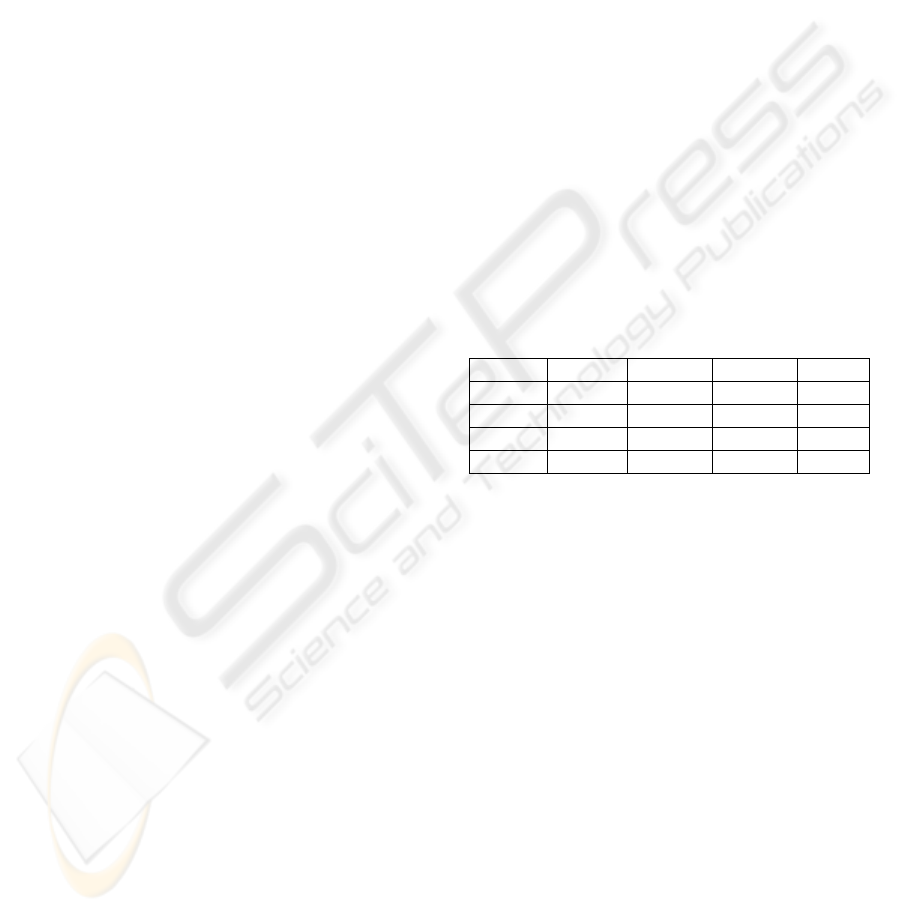
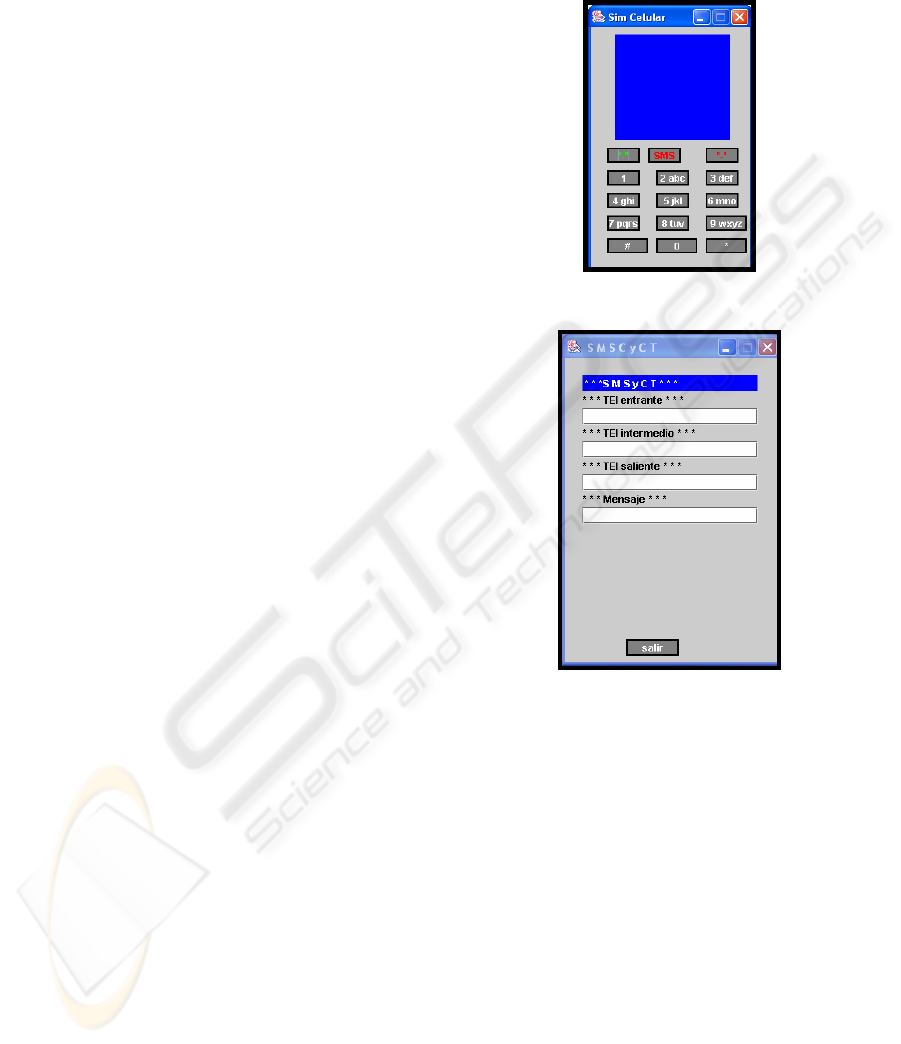
SimGSM has two interfaces (modules): The cell
phone (Fig. 3) and the SMS/Phone center (Fig. 4).
The cell phone (M1) emulates the basic functions of
a real GSM cell phone and it is employed to send
commands and receive the status of the robot in
SimRobot. The SMS/Phone Center (M3) is in charge
of verify, validate, monitor and establish
communications and data transmission between
modules.
Figure 3: The cell phone interface
Figure 4: The SMS/Phone Center interface
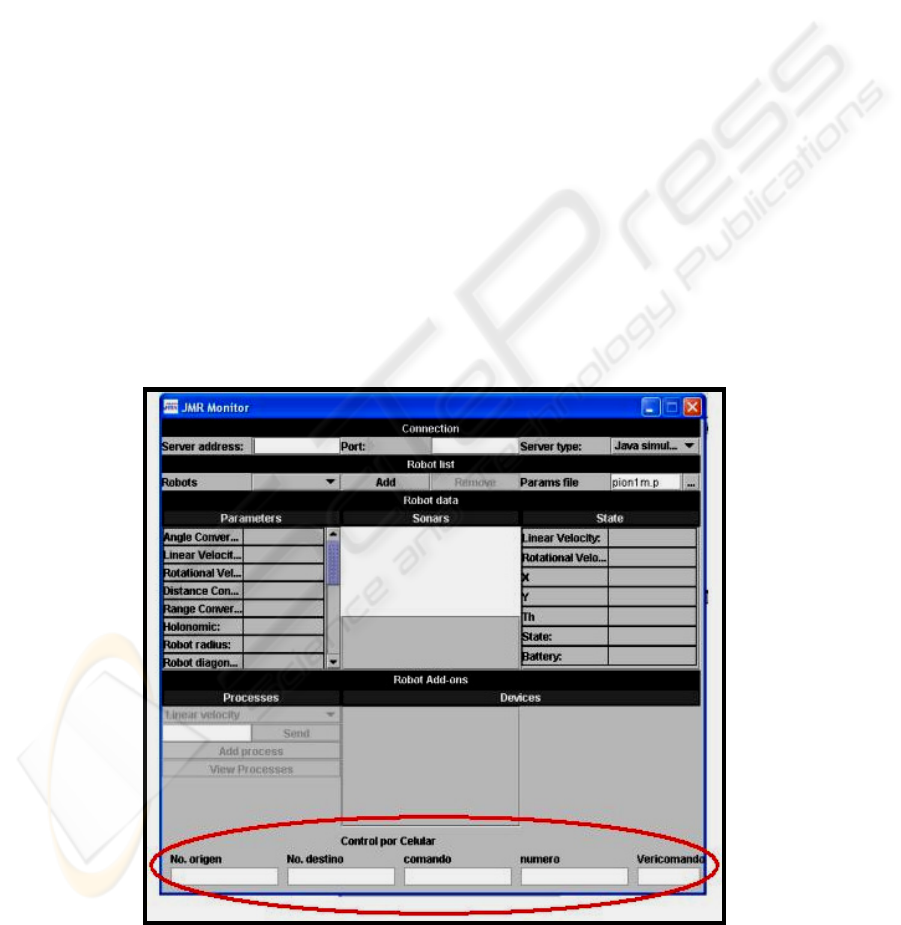
The SimRobot interface is a modified version of
JMR, where we add the GSM modem (M2), which is
attached to the robot, and the VeriCommand module
(Fig. 5). The additional modules are employed to
monitor and verify commands, communication and
data transmission.
The robot control simulation was performed
employing the interfaces. The robot and the world
are initially loaded in SimRobot. Next, we send
several commands following the rules dictated in
section 4.1 and we receive the corresponding (text or
tone) message for every command sent. In SimRobot
we could observe the robot behavior, the execution
of commands and the robot status. During test we
observe an acceptable performance. We test the two
possibilities of control, considering all reasonable
possibilities because we expect to translate this
system to real world, using commercial cell phones,
the GSM network and a Pioneer mobile robot.
SIMULATING TELEROBOTICS BY CELLULAR TELEPHONY
333
7 CONCLUSIONS AND FUTURE
WORK
We have present a telerobotics system simulator as a
first approximation to control mobile robots using a
cell phone through the GSM network: Telerobotics
by cell phone.
The system was modeled employing UML to
consider all possibilities that can emerge during
operation. UML modeling includes analysis, design,
implementation and testing models, and every model
has different UML diagrams.
The system was developed in Java, including
JMR and JMF. It is a client-server architecture. We
expect some modifications and additions in future to
the system: (1) A module for speech recognition to
command the robot via voice, (2) a module for
speech creation to provide oral status information to
user, and (3) the robot control via Internet
considering that at present, cellular telephony
technology provides such service.
We also expect to evolve the system to real
world, using cell phones, the GSM network and a
mobile robot as Pioneer as soon as possible.
Finally, due latency, the control of the robot
using SMS messages is not recommended, but it is
just an alternative and possibility.
REFERENCES
ActivMedia Robotics. 2005. http://www.activrobots.com.
Fogelklou, C. 1999. DTMF Generation Using the SX
Microcontroller. Scenix Application Note. No. 6.
Gallardo-Lopez, D. et al. 2003. Java Mobile Robots (JMR)
Manual del Programador. DCCIA, U. de Alicante.
Gerkey, B. P. et al. 2003. The Player/Stage Project: Tools
for Multi-Robot and Distribited Sensor Systems. In
Proc. of the International Conf. on Advanced Robotics
2003. Coimbra, Portugal, pp. 317-323.
Ibrahim, J. 2002. 4G Features. Bechtel Telcom. Technical
Journal. Vol. 1, No. 1, pp. 11-14.
Konolige, K. et al. 1997. The Saphira Architecture: A
Design for Autonomy. Journal of Experimental &
Theoretical AI. Vol. 9, No. 1, pp. 215-235.
Popkin, Software and Systems. 1998. Modeling Systems
with UML. A Popkin System White Paper.
Rahnema, M. 1993. Overview of the GSM System and
Protocol Architectura. IEEE Communications
Magazine. No. April 1993.
Yucatán, D. de. 2001. Teléfonos celulares ¿bendición o
pesadilla. Reportaje Especial del Diario de Yucatán.
http://www.yucatan.com.mx/especiales/celular/
Figure 5: SimRobot: A modified version of JMR. The additional modules corresponding to GSM modem and VeriCommand
are indicated at the bottom of image
ICINCO 2005 - ROBOTICS AND AUTOMATION
334
