
SYNTHESIZING DETERMINISTIC CONTROLLERS IN
SUPERVISORY CONTROL
Andreas Morgenstern and Klaus Schneider
University of Kaiserslautern, Department of Computer Science
P.O. Box 3049, 67653 Kaiserslautern, Germany
Keywords:
Controller Synthesis, Supervisory Control, Discrete Event Systems.
Abstract:
Supervisory control theory for discrete event systems is based on finite state automata whose inputs are par-
titioned into controllable and uncontrollable events. Well-known algorithms used in the Ramadge-Wonham
framework disable or enable controllable events such that it is finally possible to reach designated final states
from every reachable state. However, as these algorithms compute the least restriction on controllable events,
their result is usually a nondeterministic automaton that can not be directly implemented. For this reason, one
distinguishes between supervisors (directly generated by supervisory control) and controllers that are further
restrictions of supervisors to achieve determinism. Unfortunately, controllers that are generated from a super-
visor may be blocking, even if the underlying discrete event system is nonblocking. In this paper, we give
a modification of a supervisor synthesis algorithm that enables us to derive deterministic controllers. More-
over, we show that the algorithm is both correct and complete, i.e., that it generates a deterministic controller
whenever one exists.
1 INTRODUCTION
New applications in safety critical areas require the
verification of the developed systems. In the past
two decades, a lot of verification methods for check-
ing the temporal behavior of a system have been de-
veloped (Schneider, 2003), and the research lead to
tools that are already used in industrial design flows.
These tools are able to check whether a system K sat-
isfies a given temporal specification ϕ. There are a lot
of formalisms, in particular, the µ-calculus (Kozen,
1983), ω-automata (Thomas, 1990), as well as tempo-
ral (Pnueli, 1977; Emerson and Clarke, 1982; Emer-
son, 1990) and predicate logics (B
¨
uchi, 1960b; B
¨
uchi,
1960a) to formulate the specification ϕ (Schneider,
2003). Moreover, industrial interest lead already to
standardization efforts on specification logics (Ac-
cellera, 2004).
Besides the verification problem, where the entire
system K and its specification must be already avail-
able, one can also consider the controller synthesis
problem. The task is here to check whether there is a
system C such that the coupled system K k C satisfies
ϕ. Obviously, this problem is more general than the
verification problem. Efficient solutions for this prob-
lem could be naturally used to guide the development
of finite state controllers.
The controller synthesis problem is not new; sev-
eral approaches exist for the so-called supervisory
control problem. In particular, the supervisory control
theory initiated by Ramadge and Wonham (Ramadge
and Wonham, 1987) provides a framework for the
control of discrete event systems. The system (also
called a plant) is thereby modeled as a generator of a
formal language. The control feature is represented
by the fact that certain events can be disabled by a so-
called supervisor. One result of supervisory control
theory is that in case of formal languages, i.e., finite
state machines, such a supervisor can be effectively
computed.
However, if an implementation has to be derived
from a supervisor, several problems have to be solved
(Dietrich et al., 2002; Malik, 2003). A particular
problem that we consider in this paper is the deriva-
tion of a deterministic controller from a supervisor
that guarantees the nonblocking property. A system
is thereby called nonblocking, if it is always possible
to complete some task, i.e. to reach some designated
(marked) state from every reachable state. If we con-
sider the events as signals that can be sent to the plant,
a valid controller should decide in every state what
signal should be sent to the plant to ensure that the
marked state is actually reached. However, even if
the generated supervisor is nonblocking, a controller
24
Morgenstern A. and Schneider K. (2005).
SYNTHESIZING DETERMINISTIC CONTROLLERS IN SUPERVISORY CONTROL.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 24-31
DOI: 10.5220/0001164500240031
Copyright
c
SciTePress

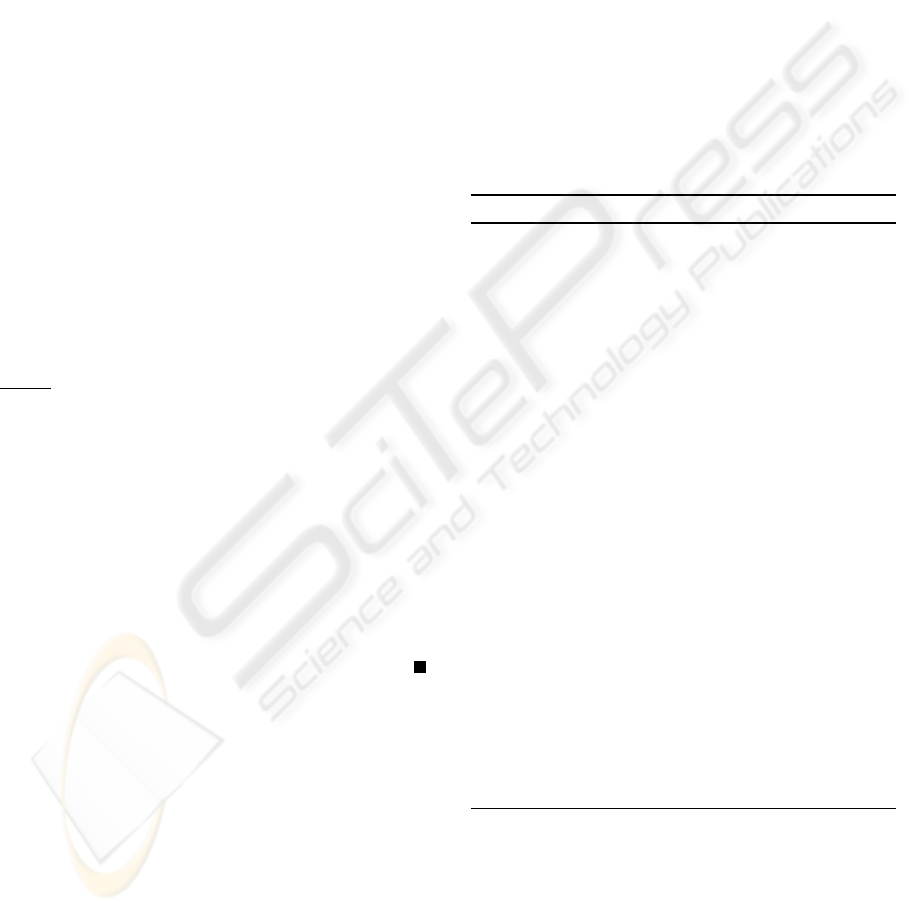
idle
task A task B
down
star t A
star t B
f A
f B
star t B
star t A
(a) uncontrolled behavior
idle
task A task B
start A start B
f A
f B
(b) supervised behavior
idle
task A
start A
f A
(c) blocking controller
Figure 1: Generation of a Blocking Controller
that is derived by simply selecting in each state one of
the allowed events/signals could be blocking.
As an example, consider the automaton that is
given in Figure 1(a). This automaton represents a
system with two tasks task
A and task B that can be
started with events start
A and start B, respectively.
These events are controllable, i.e. they can be disabled
by a supervisor. If one of the machines completes
its task, the (uncontrollable) events f
A and f B oc-
cur, respectively, leading again to the initial state idle.
Whenever both machines work at the same time, the
system breaks down, since the state down is reached
from where on no further progress is possible. Su-
pervisory control theory can fix the problem that state
down is reached by disabling events start
B in state
task
A and start A in state task B (Figure 1(b)). How-
ever, when we have to implement a deterministic con-
troller that has to select one of the signals start A and
start
B, we get a serious problem: if the controller al-
ways selects start
A, the marked state task B is never
reached, and therefore the nonblocking property is vi-
olated (Figure 1(c)).
In (Malik, 2003; Dietrich et al., 2002), the gen-
eration of deterministic controllers is restricted to
cases where certain conditions hold. It is proved that
these conditions guarantee that every deterministic
controller derived from the supervisor is nonblock-
ing. However, no controller can be constructed in
case the discrete event system does not satisfy these
conditions. In particular, a valid controller may exist,
even if the conditions of (Malik, 2003; Dietrich et al.,
2002) do not hold. For example, this is the case for
the automaton given in Figure 1. A valid controller is
obtained by selecting start
B in state idle.
In this paper, we present a new approach to gen-
erate deterministic controllers from supervisors that
does not suffer from the above problem. To this end,
we introduce a more general property than nonblock-
ing which we call forceable nonblocking. A discrete
event system satisfies this property if and only if there
exists a deterministic controller that ensures that every
run (either finite or infinite) of the controlled system
visits a marked state. Obviously, this requirement is
stronger than the nonblocking property. Our algo-
rithm guarantees that a marked state will be reached,
no matter how the plant behaves. In contrast, the non-
blocking property only requires that the plant has the
chance to reach a marked state. Although our prop-
erty is more general than nonblocking, our algorithm
is just a slight adjustment of the original supervisor
synthesis algorithm which is known to have moderate
complexity bounds.
The paper is organized as follows: In the next Sec-
tion, we present the basics of supervisory control the-
ory. In Section 3, we present our new algorithm to
compute deterministic nonblocking controllers from
supervisors whenever this is possible. Finally, the pa-
per ends with some conclusions and directions for fu-
ture work.
2 SUPERVISORY CONTROL
THEORY
In this section, we will give a brief introduction to the
supervisory control theory as initiated by Ramadge
and Wonham (Ramadge and Wonham, 1987). For a
more detailed treatment of the topic we refer to (Won-
ham, 2001).
Traditionally, control theory has focused on con-
trol of systems modeled by differential equations, so-
called continuous variable dynamic systems. There,
the feedback signal from the controller influences the
behavior of the system, enforcing a given specifica-
tion that would not be met by the open-loop behavior.
Another important class of system models are those
where states have symbolic values instead of numeri-
cal ones. These systems change their state whenever
an external or internal event occurs. This class of sys-
tems, called discrete event systems (DES), is the fo-
cus of supervisory control theory (Ramadge and Won-
ham, 1987).
The theoretical roots of supervisory control theory
explain some of the terminology used. In the Ra-
madge Wonham (RW) framework, one speaks of a
SYNTHESIZING DETERMINISTIC CONTROLLERS IN SUPERVISORY CONTROL
25

plant
supervisor
events
generated by
plant
events
enabled by
supervisor
Figure 2: The Ramadge-Wonham Framework
plant, a system which generates events and encom-
passes the whole physically possible behavior of the
system to be controlled (including unwanted situa-
tions). The specification is a subset of this behav-
ior that should be matched by adding a controller.
A supervisor is an entity that is coupled with the
plant through a communication channel that allows
the supervisor to influence the behavior of the plant
by enabling those events that may be generated in
the next state of the system (see Figure 2). Usu-
ally, in a physical system, not all of the events can
be influenced by an external supervisor. This is cap-
tured by distinguishing between events that can be
prevented from occurring, called controllable events,
and those that cannot be prevented, called uncontrol-
lable events. We denote the sets of uncontrollable and
controllable events as Σ
u
and Σ
c
, respectively, and
define Σ = Σ
c
∪ Σ
u
.
The Ramadge Wonham formulation of the supervi-
sory control problem makes use of formal language
theory and automata: A finite automaton is a 5-tuple
A = hQ, Σ, δ, q
0
, M i where Σ is a set of events, Q is
a set of states, δ : Q× Σ → Q is a transition function,
and q
0
∈ Q is the initial state. The states in the set
M ⊆ Q are chosen to mark the completion of tasks
by the system and are therefore called marker states.
We write δ(q, σ) ↓ to signify that there exists a tran-
sition labeled with σ, leaving q. It is often necessary
to refer to the set of events for which there is a transi-
tion leaving state q. We refer to these events as active
events:
Definition 1 (Active Events) Given an automaton
A = hQ, Σ, δ, q
0
, M i and a particular state q ∈ Q,
the set of active events of q is:
act
A
(q) := {σ ∈ Σ | δ(q, σ ) ↓}
If the plant and the supervisor are represented using
finite automata, the control action of the supervisor is
captured by the synchronous product:
Definition 2 (Automata Product) Given automata
A
P
= hΣ, Q
P
, δ
P
, q
0
P
M
P
i and A
S
= hΣ, Q
S
,
δ
S
, q
0
S
, M
S
i, the product A
P
× A
S
is the automaton
hΣ, Q
P
× Q
S
, δ
P×S
, (q
0
P
, q
0
S
), M
P
× M
S
i, where
δ
P×S
((p, q), σ) = (p
′
, q
′
) iff
δ
P
(p, σ) = p
′
∧ δ
S
(q, σ) = q
′
Note that in a state (p, q) of the synchronous prod-
uct, the active events are exactly those events that are
active both in the plant and the supervisor,i.e.
act
A
P
×A
S
((p, q)) = act
A
P
(p) ∩ act
A
S
(q) .
Disabling controllable events in the states of the su-
pervisor will therefore also disable them in the prod-
uct. This is how the supervisor enforces his control
function.
The behavior of the plant represented by a finite
automaton is closely related to two formal languages
over the alphabet of events Σ, the generated language
L (A) and the marked language L
m
(A). The gener-
ated language L (A) represents sequences of events
that the plant generates during execution while the
marked language L
m
(A) represents those event se-
quences that lead to a marker state. Formally, the two
languages are defined as follows
1
:
Definition 3 (Generated and Marked Language)
L (A) = {w ∈ Σ
∗
: δ(q
0
, w) ↓}
L
m
(A) = {w ∈ Σ
∗
: δ(q
0
, w) ∈ M}
Given both the plant A
P
and the supervisor A
S
, the
generated and marked language of the controlled sys-
tem are denoted by L (A
P
/A
S
) and L
m
(A
P
/A
S
)
and defined by the generated and marked language of
the product automaton:
L (A
P
/A
S
) := L (A
P
× A
S
) = L (A
P
) ∩ L (A
S
)
L
m
(A
P
/A
S
) : = L
m
(A
P
× A
S
)
= L
m
(A
P
) ∩ L
m
(A
S
)
When we consider algorithms, it is also necessary
that the specification is given as a finite automaton.
The assumption that the uncontrollable events can not
be prevented from occurring, places restrictions on
the possible supervisors. Therefore, a specification
automaton A
E
is called controllable with respect to
a plant A
P
, if and only if for every state (p, q) of
A
P
×A
E
that is reachable by a string in L (A
P
× A
E
)
and every uncontrollable event σ ∈ Σ
u
, the following
holds:
σ ∈ act
A
P
(p) ⇒ σ ∈ act
A
E
(q) .
In other words, A
E
is controllable if and only if no
word of L (A
P
) that is generated according to the
specification, exits from the behavior permitted by
the specification if it is followed by an uncontrollable
event. Specifications that do not fulfill this require-
ment are called uncontrollable. If a specification is
uncontrollable, the product automaton contains one or
more reachable bad states, which are states (p, q) that
fail to satisfy the following condition:
1
As usual, we allow δ to process also words instead of
only single events.
ICINCO 2005 - ROBOTICS AND AUTOMATION
26

act
A
P
×A
E
((p, q)) ⊇ act
A
P
(p) ∩ Σ
u
Given a specification automaton A
E
, the language
K = L
m
(A
E
) is controllable if and only if A
P
× A
E
has no bad states. Besides controllability, another im-
portant property of discrete event systems is the non-
blocking property which states that it is always possi-
ble to complete some task, i.e. that from every reach-
able state q ∈ Q, it is possible to reach a marked state.
Formally, an automaton is nonblocking, if and only if
for each reachable state q ∈ Q, we have
L
m
(q) = {w ∈ Σ
∗
| δ(q, w) ∈ M} 6= ∅.
States that have a path to a marked state are called
coreachable. Ramadge and Wonham have shown that
given a specification K which is not controllable, it is
possible to construct for every plant A
P
and every
specification A
E
the supremal controllable sublan-
guage of K, denoted supC (K). This result is of
practical interest: Given that the specification lan-
guage K is uncontrollable, it is possible to compute
supC (K) and to construct a supervisor A
S
such that
L
m
(A
S
/A
P
) = supC (K). This implies that the con-
trolled system is nonblocking, meaning that the con-
structed supervisor does not prevent the plant from
completing a task. This supervisor is a solution to the
following problem:
Definition 4 (Supervisory Control Problem)
Given a plant A
P
, a specification language
K ⊆ L
m
(A
P
) representing the desired behavior of
A
P
under supervision, find a nonblocking supervisor
A
S
such that L
m
(A
S
/A
P
) ⊆ K.
Given a specification automaton A
E
, we can construct
the least restrictive solution from the product automa-
ton A
P
× A
E
. The marked language of this least
restrictive solution A
S
is equal to supC (K). If an
automaton A = hQ, Σ, δ, q
0
A
, M
A
i is given that rep-
resents the product of the plant and the specification,
algorithm 1 can be used to compute this supervisor
(Ziller and Schneider, 2003).
Essentially, this algorithm consists of two loops.
The inner loop calculates the coreachable states x
C
,
and the outer loop computes the good states x
G
,
i.e. states that are not bad states. Since removing bad
states could destroy the coreachability property and
removing non-coreachable states could result in new
bad states, the two loops have to be nested. Based
on this algorithm, we will provide an algorithm that
calculates a supervisor with the property that every
deterministic controller generated from this supervi-
sor is a valid controller, i.e. guarantees that a marked
state is reached, irrespectively of the behavior of the
plant.
Algorithm 1: Supervisor Synthesis Algorithm
x
0
G
= Q
A
\ {q ∈ Q | q is initial bad};
j = 0;
repeat
x
(0,j)
C
= M ∩ x
j
G
;
i = 0;
repeat
x
(i+1,j)
C
= x
j
G
∩
x
i
C
∪
(
q ∈ Q
∃σ ∈ act
A
(q) .
δ
A
(q, σ) ∈ x
(i,j)
C
)!
i = i + 1;
until x
i
C
= x
i−1
C
;
x
j+1
G
= x
j
G
∩
q ∈ Q
∀σ ∈ act
A
(q) ∩ Σ
u
.
δ
A
(q, σ) ∈ x
(i,j)
C
∩ x
j
G
j = j + 1;
until x
j
g
= x
j−1
g
;
3 CONTROLLER SYNTHESIS
We have seen by the example given in Figure 1 that
the nonblocking property is too weak to guarantee
that a marked state is reached under control by a deter-
ministic controller. This is due to the fact that a state
is coreachable even if there exists an infinitely long
sequence of events that never visits a marked state.
We therefore sharpen the coreachability property as
follows:
Definition 5 (Forceably Coreachable States) A
state is forceable coreachable, if it is coreachable
and
∃n ∈ N.∀t ∈ Σ
∗
.
δ(q, t) ↓ ∧|t| ≥ n ⇒ ∃t
′
⊑ t.δ(q, t
′
) ∈ Q
m
∧
δ(q, t) ↓ ∧|t| < n ⇒
∃t
′
⊑ t.δ(q, t
′
) ∈ Q
m
∨
act
A
(q) 6= ∅
Intuitively, a state is forceable coreachable, if there
exists a threshold after which a marked state is un-
avoidable. In contrast to the definition of coreachabil-
ity that imposes a condition on the future, we demand
something about the past: we demand that after a cer-
tain amount of steps (referenced by n), a marked state
must have been visited. As long as this bound n is not
reached, we demand that either the system does not
stop or that a marked state has already been reached.
In terms of temporal logics, we demand that on all
paths a marked state must be reached. In contrast,
the nonblocking property only states that for all states
there exists a path where M is reached. We call an
automaton forceable nonblocking, if each reachable
SYNTHESIZING DETERMINISTIC CONTROLLERS IN SUPERVISORY CONTROL
27
state is forceable coreachable. The Controller Syn-
thesis Problem is now given as follows:
Definition 6 (Controller Synthesis Problem)
Given a plant A
P
, a specification language
K ⊆ L
m
(A
P
) representing the desired behavior of
A
P
under control, find a nonblocking supervisor A
C
such that
• L
m
(A
C
/A
P
) ⊆ K.
• A
C
× A
P
is forceable nonblocking.
Hence, a controller ensures that a marked state is ac-
tually reached. It is very easy to derive a determinis-
tic controller from such a solution: in every step, we
can simply select a controllable event to ensure that
a marked state is actually reached. This is due to the
fact, that we demand that all paths leaving a forceable
coreachable state sooner or later reach a marked state.
Therefore, it is irrelevant which of the active control-
lable events we select.
Theorem 1 Given A
P
= hQ, Σ, δ, q
0
A
P
, M
A
P
i and
A
C
= hQ, Σ, δ, q
0
A
C
, M
A
C
i such that
L (A
C
) ⊆ L (A
P
) ∧ L
m
(A
C
) ⊆ L
m
(A
P
) ,
then, the following holds: If A
C
is forceable coreach-
able then A
C
× A
P
is forceable coreachable.
Proof:
Let (q, p) ∈ Q
A
C
× Q
A
P
be reachable, such
that δ
A
C
×A
P
((q
A
C
0
, q
A
P
0
), s) = (q, p). Then, also
q ∈ Q
A
C
must be reachable in A
C
. Therefore, q is
forceable coreachable with a constant n. Now, choose
a t ∈ Σ
∗
such that δ
A
C
×A
P
((q, p), t) ↓. We distin-
guish between two cases: First, we assume |t| ≥ n.
Then, there exists a t
′
⊑ t such that δ(q, t
′
) ∈ M
A
C
.
Therefore, st
′
∈ L
m
(A
C
) ⊆ L
m
((A
P
)) holds.
Since all automata are deterministic, it follows that
δ((q, p), t
′
) ∈ (M
A
C
×M
A
P
) holds. In the remaining
case, we have |t| < n. Then, either there exists a
t
′
⊑ t that visits a marked state as in the first case or
act
A
C
(q) 6= ∅. Again, since the language inclusion
holds, we have act
A
C
×A
P
(δ((q, p), t)) 6= ∅.
4 CONTROLLER SYNTHESIS
ALGORITHM
In this section, we develop a controller synthesis al-
gorithm based on the supervisor synthesis algorithm
of Section 1. In order to guarantee the forceable non-
blocking property, we have to adopt the calculation of
the coreachable states. In contrast to the coreachabil-
ity property, which only demands that a marked state
is reachable, i.e. that it is possible to directly reach
a marked state or to reach a state which is known to
be coreachable, a state is forceable coreachable if it is
coreachable and all events lead to forceable coreach-
able states. State and event pairs that guarantee this
property are collected in the set moves. This implies
that all destination states of uncontrollable transitions
leaving a state q must be identified as forceable core-
achable before we can add any transition from q to
moves. Otherwise, q is bad, which is identified in the
x
G
-loop. This ensures that the controllability prop-
erty is not violated. To prevent the plant from looping,
we forbid adding new moves, if we had already found
a move that lead to a marked state. This is done due
to the fact that those newly found moves will need a
longer path to reach a marked state than the already
introduced moves and may therefore introduce loops.
We collect the forceable coreachable states in the set
x
C
by adding those states that have a path to a marked
state where this can be guaranteed. Altogether, we
thus have developed algorithm 2.
Algorithm 2: Controller Synthesis Algorithm
j = 0;
x
0
G
= Q
A
\ {q ∈ Q
A
| q is initial bad};
repeat
x
(0,j)
C
= M ∩ x
j
G
;
i = 0;
move
(0,j)
= {};
repeat
move
(i+1,j)
= move
(i,j)
∪
(q, σ)
δ
A
(q, σ) ∈ x
(i,j)
C
∧
∀σ ∈ act
A
(q) ∩ Σ
u
.
δ
A
(q, σ) ∈ x
(i,j)
C
∧
∀σ ∈ Σ. (q, σ) /∈ move
(i,j)
x
(i+1,j)
C
= x
j
G
∩
x
(i,j)
C
∪
q
∃(q, σ) ∈ move
(i+1,j)
δ
A
(q, σ) ∈ x
(i,j)
C
i = i + 1;
until x
i
C
= x
i−1
C
;
x
j+1
G
=
x
j
G
∩
q ∈ Q
∀σ ∈ act
A
(q) ∩ Σ
u
.
δ
A
(q, σ) ∈ x
(i,j)
C
∩ x
j
G
j = j + 1
until x
j
g
= x
j−1
g
;
The above algorithm may only loop for a finite
number of iterations, since there are only finitely
many states: In x
C
, only finitely many states may
be added and from x
G
only finitely many states
may be removed. Therefore, there exists a k such
that x
k
G
= x
k+1
G
finally holds. Additionally, for
every i there exists a l such that x
(i,l)
C
= x
(i,l+1)
C
and moves
(i,l)
= moves
(i,l+1)
. For this reason,
we use the following notation:x
k
G
= x
∞
G
and also
ICINCO 2005 - ROBOTICS AND AUTOMATION
28

x
(i,∞)
C
:= x
(i,k)
C
as well as move
(i,∞)
:= move
(i,k)
for every i, and finally x
(∞,∞)
C
:= x
(l,k)
C
and
moves
(∞,∞)
:= moves
(l,k)
for the last iteration
step.
Note that according to the definition of x
C
, it
holds that x
(i,j)
C
⊆ x
j
G
for every i, j and thus also
x
(∞,∞)
C
⊆ x
∞
G
holds. Since move does only contain
transitions leading to forceable coreachable states, it
thus contains only transitions to good states.
If q
0
A
∈ x
(∞,∞)
C
holds, we define a controller as
follows: A
C
= hQ
A
, Σ, δ
A
C
, q
0
A
, M
A
i with
δ
A
C
(q, σ) =
δ
A
(q, σ) , if (q, σ ) ∈ move
(∞,∞
)
↑ , else
The following lemma shows that we decrease the dis-
tance to a marked state whenever we use an event en-
abled by the controller:
Lemma 1
∀i > 0∀q ∈
x
(i,∞)
C
\ x
(i−1,∞)
C
∀σ ∈ act
A
C
(q) .
δ
A
C
(q, σ) ∈ x
(i−1,∞)
C
Proof:
Let q ∈ Q
A
such that q ∈ x
(i+1,∞)
C
\ x
(i,∞)
C
.
This implies that there must exist a move
(q, σ) ∈
move
(i+1,∞)
\ move
(i,∞)
such that
δ
A
(q, σ) ∈ x
(i,∞)
C
. But this directly implies that
δ
A
(q, σ) ∈ x
(i,∞)
C
for every (q, σ) ∈ move
(i+1,∞)
.
We thus have the statement for those moves added
in the i + 1-th iteration step. Additionally, if follows
from the definition of move that there can be no move
(q, σ
′
) ∈ move
(∞,∞)
\ move
(i+1,∞)
. Therefore
δ
A
C
(q, σ) ∈ x
(i,∞)
C
for every σ ∈ act
A
C
(q).
The above lemma does not apply to marked states
(those are contained in x
(0,∞)
C
). And indeed, with-
out the additional set x
G
, this would not be true. The
next lemma fixes this deficiency.
Lemma 2
∀q ∈
M
A
∩ x
(∞,∞)
C
∀σ ∈ act
A
C
(q) .
δ
A
C
(q, σ) ∈ x
(∞,∞)
C
Proof:
Choose an arbitrary state q ∈
M
A
C
∩ x
(∞,∞)
C
⊆ x
∞
G
. The proof follows directly
for uncontrollable events because of the definition of
x
∞
G
. Thus, consider a controllable event. According
to the definition of δ
A
C
, σ ∈ act
A
C
(q) ∩ Σ
c
implies
that (q, σ) ∈ move
(∞,∞)
. According to the definition
of move, we must have (q, σ) ∈ move
(i,∞)
for a
suitable i. Therefore, we have δ
A
(q, σ) ∈ x
(i−1,∞)
C
,
and thus δ
A
C
(q, σ) ∈ x
(i−1,∞)
C
.
Since the x
(i,∞)
C
, i ∈ N are monotone in i, the follow-
ing Lemma follows inductively:
Lemma 3
∀q ∈ x
(∞,∞)
C
∀t ∈ Σ
∗
.
δ
A
C
(q, t) ↓ ⇒ δ
A
C
(q, t) ∈ x
(∞,∞)
C
While the above lemma only guarantees that the
forceable coreachable states are never left, the next
lemma shows that the plant may not stop until a
marked state is reached:
Lemma 4
∀i > 0∀q ∈ x
(i,∞)
C
∃σ ∈ act
A
C
(q) .
δ
A
C
(q, σ) ∈ x
(i−1,∞)
C
Proof:
According to the definition and the monotony
of x
C
,
q ∈ x
(i,∞)
C
⇔ q ∈ x
∞
G
∧
q ∈ M
A
∨ ∃(q, σ) ∈ move
(i,∞)
(q).
δ
A
C
(q, σ) ∈ x
(i−1,∞)
C
If q ∈ M
A
we are done, otherwise the lemma follows
from the definition of δ
A
C
and the monotony of
move
(i,∞)
with respect to i.
Finally, we now have the following theorem:
Theorem 2 All q ∈ x
(∞,∞)
C
are coreachable in A
C
.
Proof: Take some q ∈ x
(∞,∞)
C
. Then, q ∈ x
(i,∞)
C
for
some k. If q is marked, we are done. Otherwise, we
can iteratively apply Lemma 4 to generate a string
t ∈ Σ
∗
that reaches a marked state. This is due to the
fact that if we apply Lemma 4, then the i-index of the
destination state decreases in each step. Therefore,
after at most k iteration steps, we have constructed a
word t such that δ(q, t) ∈ x
(0,∞)
C
= M
A
= M
A
C
.
We will show in the next lemma that also the stronger
property of forceable coreachability holds:
Theorem 3 All q ∈ x
(∞,∞)
C
, are forceable coreach-
able
Proof:
The coreachability property follows from the
last theorem. We will now show the rest of the force-
able coreachability property for any q ∈ x
(∞,∞)
C
:
Since q ∈ x
(∞,∞)
C
, there exists an i ∈ N such that
q ∈ x
(i,∞)
C
\ x
(i−1,∞)
C
. If i = 0, we are done, because
then x
c
is marked. Otherwise we show that this i is the
threshold that is required for forceable coreachability.
Let t ∈ Σ
∗
be such that δ
A
C
(q, t) ↓ holds. Apply-
ing Lemma 3 shows that δ
A
C
(q, t) ∈ x
(∞,∞)
C
holds.
SYNTHESIZING DETERMINISTIC CONTROLLERS IN SUPERVISORY CONTROL
29

We distinguish two cases: If |t| < i holds, then ei-
ther δ
A
C
(q, t) ∈ M
A
or ∃σ ∈ act
A
C
(q) .δ
A
C
(q, σ) ∈
x
(i−1,∞)
C
according to Lemma 4. Both cases satisfy
the condition of forceable coreachability for the case
|t| < i.
Now consider any string t with length i and assume
that δ
A
C
(q, t
′
) /∈ M
A
for every t
′
⊑ t. Then, we
can iteratively apply Lemma 1 i-times to conclude
that δ
A
C
(q, t) ∈ x
(0,∞)
C
⊆ M
A
holds. The forceable
coreachability property therefore holds for every
string with length i and thus also for every string of
length greater i.
The following theorem gives us the correctness of our
algorithm:
Theorem 4 (Correctness of the Algorithm) If
q
0
A
∈ x
(∞,∞)
C
, then A
C
is forceable nonblocking and
the generated supervisor A
C
is a valid solution to the
controller synthesis Problem.
Proof:
Since q
0
A
∈ x
(∞,∞)
C
holds, we can conclude
from Lemma 3 that every reachable state is contained
in x
(∞,∞)
C
. The first part of the statement now
follows from theorem 3. For the second part, we note
that the generated language is necessarily contained
in the specification, because of the construction of
A = A
P
× A
E
. The forceable nonblocking property
follows now from theorem 1. The controllability
property can be seen as follows: Similar to the
original supervisor synthesis algorithm, we can be
sure that no initial bad state is reached, because we
removed those states from the good states and only
good states may be visited. On the other hand, we
never remove single uncontrollable transitions due to
the definition of move. Rather, we remove all states
that have an uncontrollable transition to a non-good
or non-forceable coreachable state in the condition
for the good states. Since x
∞
C
⊆ x
∞
G
and q
A
∈ x
∞
C
,
we can be sure that only good states are visited.
We have shown that the above algorithm is correct.
To show also its completeness, i.e. that the algorithm
generates a controller, whenever a controller exists,
we need the next definition and some additional lem-
mata. According to the definition of forceable core-
achability, for every forceable coreachable state, there
exists a constant n after which a marked state is un-
avoidable. Thus, we can define an ordering on the
states by taking the minimal constant n for which the
forceable coreachable property holds. Thus, we de-
fine for every automaton A:
F
n
A
=
q ∈ Q
A
q is forceable coreachable
with a minimal constant n
Lemma 5 For every forceable coreachable automa-
ton A the following holds:
∀i > 0∀q ∈ F
i
A
.
∀σ ∈ act
A
(q) .δ
A
(q, σ) ∈
[
j<i
F
j
A
∧
∃σ ∈ act
A
(q) .δ
A
(q, σ) ∈
[
j<i
F
j
A
Proof:
Let q in F
i
A
. For the first part, as-
sume that there exists σ ∈ act
A
(q) such that
δ
A
(q, σ) /∈
S
j<i
F
j
A
holds. Then, we can distin-
guish two cases: if q
′
= δ
A
(q, σ) is not forceable
coreachable, then there exists an infinite string t with
δ(q
′
, t) ↓ that avoids all marked states. Accordingly,
q can not be forceable coreachable, because other-
wise all marked states are avoidable by the infinite
string σt. On the other hand, if δ
A
(q, σ) is forceable
coreachable, but with a constant greater or equal i,
then q can not have a minimal constant i. To prove the
second part of the lemma, we first note that q can not
be marked, because otherwise q ∈ F
0
A
. Therefore,
there exists a successor state, because otherwise q
can not be coreachable. However, this successor state
must be contained in
S
j<i
F
j
A
according to the proof
of the first part.
Lemma 6 If there exists an automaton A
C
such that
A × A
C
is forceable nonblocking and A
C
respects the
controllability property with respect to A, then q
0
A
∈
x
(∞,∞)
C
.
Proof:
Since A × A
C
is forceable nonblocking, every
reachable state is forceable coreachable, therefore
contained in some F
i
A×A
C
. We will show by induc-
tion on i:
if (p, q) ∈ F
i
A×A
C
for some i, then q ∈ x
(i,∞)
C
The above lemma follows then from the fact that the
initial state (q
0
A
, q
0
A
C
) must be forceable nonblocking
and therefore contained in some F
i
A×A
C
.
Inductive Base: i = 0. Then (p, q) is marked and
we are done.
Inductive Step: Let (p, q) ∈ F
i+1
A×A
C
. Then accord-
ing to lemma 5 the following holds:
∀σ ∈ act
A×A
C
((p, q)) .δ
A×A
C
((p, q), σ) ∈
[
j<i
F
j
A×A
C
Since the controllability property holds, we have that
every uncontrollable event in q is also active in (p, q).
Therefore
∀σ ∈ act
A
(q) ∩ Σ
u
.δ
A×A
C
((p, q), σ) ∈
[
j<i
F
j
A×A
C
ICINCO 2005 - ROBOTICS AND AUTOMATION
30

It now follows from the inductive hypothesis and the
determinacy of A, that
∀σ ∈ act
A
(q) ∩ Σ
u
.δ
A
(q, σ) ∈
[
j<i
x
(i,∞)
C
= x
(i,∞)
C
Again considering Lemma 5, we obtain:
∃σ ∈ act
A×A
C
((p, q)) .δ
A×A
C
((p, q), σ) ∈ F
i
A×A
C
Therefore, using the inductive hypothesis, we obtain
∃σ ∈ act
A×A
C
((p, q)) ⊆ act
A
(q) .
δ
A
(q, σ) ∈
[
j<i
x
(j,∞)
C
= x
(i,∞)
C
Now either (q, σ) is added to move
i+1
, or there ex-
ists another move (q, σ
′
) that has been already added
to move. In both cases, we have q ∈ x
(i+1,∞)
C
.
We are now ready to show completeness of the algo-
rithm:
Theorem 5 (Completeness of the Algorithm)
Given a plant A
P
and a specification A
E
where
the controller synthesis problem is solvable. Then,
x
0
A
∈ x
(∞,∞)
C
, i.e. the presented algorithm generates
a valid controller.
Proof:
Let A
C
be an automaton that solves the
controller synthesis problem. Then, necessar-
ily L (A
C
× A
P
) ⊆ L (A
E
) holds as well as
L
m
(A
C
× A
P
) ⊆ L
m
(A
E
). A
C
× A
P
is forceable
nonblocking. Therefore, A
C
× A
P
× A
E
= A
C
× A
is forceable nonblocking. According to the definition
of controller synthesis problem, A
C
needs to be
controllable with respect to A
E
. Therefore, A
C
must
be also controllable with respect to A
P
× A
E
= A.
The statement follows now from Lemma 6.
5 CONCLUSION
In this paper, we have developed an algorithm for
the generation of valid controllers from a supervi-
sory control model as used in the Ramadge-Wonham
framework. To this end, we have strengthened the
coreachability property in order to guarantee that a
marked state is eventually reached, irrespective of the
plant’s behavior. We have proved the correctness and
the completeness of our algorithm. In the future, we
plan to implement our Algorithm on top of our toolset
Averest (Averest, 2005) to evaluate the runtime be-
haviour of the algorithm.
REFERENCES
Accellera (2004). PSL/Sugar.
http://www.haifa.il.ibm.com/projects/verification/sugar.
Averest (2005). www.averest.org.
B
¨
uchi, J. (1960a). On a decision method in restricted second
order arithmetic. In Nagel, E., editor, International
Congress on Logic, Methodology and Philosophy of
Science, pages 1–12, Stanford, CA. Stanford Univer-
sity Press.
B
¨
uchi, J. (1960b). Weak second order arithmetic and finite
automata. Z. Math. Logik Grundlagen Math., 6:66–
92.
Dietrich, P., Malik, R., Wonham, W., and Brandin, B.
(2002). Implementation considerations in supervisory
control. In B. Caillaud, P. Darondeau, L. Lavagno,
and X. Xie, editors, Synthesis and control of dis-
crete event systems, pages 185–201. Kluwer Acad-
emic Publishers.
Emerson, E. (1990). Temporal and modal logic. In Hand-
book of Theoretical Computer Science, volume B,
chapter Temporal and Modal Logics, pages 996–1072.
Elsevier.
Emerson, E. and Clarke, E. (1982). Using branching-time
temporal logic to synthesize synchronization skele-
tons. Science of Computer Programming, 2(3):241–
266.
Kozen, D. (1983). Results on the propositional µ-calculus.
Theoretical Computer Science, 27:333–354.
Malik, P. (2003). From Supervisory Control to Nonblock-
ing Controllers for Discrete Event Systems. PhD the-
sis, University of Kaiserslautern, Kaiserslautern, Ger-
many.
Pnueli, A. (1977). The temporal logic of programs. In Sym-
posium on Foundations of Computer Science (FOCS),
volume 18, pages 46–57, New York. IEEE Computer
Society.
Ramadge, P. and Wonham, W. (1987). Supervisory control
of a class of discrete event processes. SIAM Journal
of Control and Optimization, 25(1):206–230.
Schneider, K. (2003). Verification of Reactive Systems –
Formal Methods and Algorithms. Texts in Theoretical
Computer Science (EATCS Series). Springer.
Thomas, W. (1990). Automata on infinite objects. In Hand-
book of Theoretical Computer Science, volume B,
chapter Automata on Infinite Objects, pages 133–191.
Elsevier.
Wonham, W. (2001). Notes on control of discrete-event sys-
tems. Technical Report ECE 1636F/1637S 2001-02,
Department of Electrical and Computer Engineering,
University of Toronto.
Ziller, R. and Schneider, K. (2003). A generalized ap-
proach to supervisor synthesis. In Formal Methods
and Models for Codesign (MEMOCODE), pages 217–
226, Mont Saint-Michel, France. IEEE Computer So-
ciety.
SYNTHESIZING DETERMINISTIC CONTROLLERS IN SUPERVISORY CONTROL
31
