
Robot Behavior Planning by a Coordinator Robot in a
Symbiotic Autonomous Human-Robot System
Tao Zhang, MD Hasanuzzaman, Vuthichai Ampornaramveth and Haruki Ueno
Intelligent Systems Research Division, National Institute of Informatics,
2-1-2 Hitotsubashi, Chiyoda-ku, Tokyo 101-8430, Japan
Abstract. This paper addresses robot behavior planning by a coordinator robot
in a symbiotic autonomous human-robot system according to human requests.
A coordinator robot is constructed based on the knowledge representation of
coordination which is a description world to describe a physical domain world
on coordination, including interpreter for the human request domain, coordina-
tion interface for the problem domain, coordination policy for the solution do-
main, etc. The coordination policy in the model is adopted for planning robot
behaviors by a coordinator robot. By means of a software platform and distrib-
uted intelligent agents, a coordinator robot can be implemented and the robot
behavior planning can be carried out according to human requests. In this pa-
per, a coordinator robot is actually constructed and it can autonomously plan
robot behaviors in a symbiotic autonomous human-robot system. The experi-
mental work demonstrates the effectiveness of the proposed method.
1 Introduction
In modern society, coordination is definitely essential for performing complex tasks.
Making an effective plan is one of important aims of coordination. Originally, a hu-
man coordinator usually plans the activity of people. With the development of the
robotic technology in recent decades of years, a human coordinator extends its plan to
the activity between human and robots. Toward the future society, an intelligent robot
is required not only to be able to perform tasks, but also can make high-level decision
by means of knowledge like a human being. Such a robot is particularly required in
the symbiotic autonomous human-robot system which is proposed recently [1]. In this
system, various types of robots coexist with human at the places of everyday life,
communicate with, and aim in helping human. A human person in this system is an
ordinary member without rich knowledge on robots. But he/she can acquire services
from different robots along his/her requests expressed to robots by human-robot inter-
face. Each kind of tasks can be cooperatively performed between human and robots
or among robots only. The robots in this system have different intelligences. Some
robots called coordinator robots can interact with human through human-robot inter-
face and understand human requests. Other robots called specific robots can only
perform tasks without ability to interact with human. Therefore, the planning of robot
behaviors for various tasks is entirely performed by a coordinator robot.
Zhang T., Hasanuzzaman M., Ampornaramveth V. and Ueno H. (2005).
Robot Behavior Planning by a Coordinator Robot in a Symbiotic Autonomous Human-Robot System.
In Proceedings of the 1st International Workshop on Multi-Agent Robotic Systems, pages 72-79
DOI: 10.5220/0001159500720079
Copyright
c
SciTePress

Many researches on the planning of robot actions have been carried out for many
years. For instance, Ingrand [2] proposed extending procedural reasoning for robot
actions planning. Lee [3] adopted learning momentum for planning the robot behav-
ior in a robotic team. Learning momentum is a variation of parametric adjustment
methods. Lopes [4] presented the architecture and algorithms developed for Dorn
Dinis, a simple compass-guided robot. In this research, the robot is able to plan its
tasks based on the (possibly incomplete) map. Although these methods are effective
for planning robot actions under some certain conditions, they are lack of the ability
to plan robot actions flexibly concerning various human requests. That is, when a
person freely expresses his/her requests to robots using natural manners without any
knowledge on the operation of robots, a coordinator robot can understand the scenes
and autonomously plan robot actions for human requests.
In our research, a coordinator robot is constructed based on the knowledge repre-
sentation of coordination. The coordination which would be carried out by a robot in
a symbiotic autonomous human-robot system concretely represents the solution of
problems that occurred when robots trying to coordinate the different kinds of ser-
vices offered by human or robots according to human requests. The robot in charge of
coordination should possess the functions of understanding human requests, clarify-
ing problems in the coordination, providing the solution and maintaining the high
belief degree for its decision. With the definition on coordination, a new knowledge
representation of coordination called a description world is proposed for the physical
domain world on coordination. Based on this model, a coordinator robot is imple-
mented by means of a software platform and distributed intelligent agents. Since the
model includes the important coordination policies for planning robot behaviors, a
coordinator robot can use them to plan robot behaviors according to various human
requests. In this paper, a coordinator robot is actually constructed and robot behaviors
for different real tasks are planned by this robot. The experiment is carried out to
demonstrate the effectiveness of the proposed method.
2 Knowledge Representation of Coordination
2.1 Description World on Coordination
Coordination is existed in such a kind of physical domain world, which consists of
human request domain, problem domain, solution domain and sensor domain. In the
human request domain, a human person can express his requests by communication.
Based on human requests, problems will occur when coordinate the required services
and be expressed in the problem domain. In the solution domain, the solution of the
problem is given. Proper behaviors or activities of human and robots will be then
carried out in the sensor domain. Actually, this process of coordination is easily ful-
filled by human based on human knowledge and experience. However, if we expect a
robot to implement this process in a complex system, it is very difficult not only due
to the insufficient functions of hardware, but also short of strategies for robot to coor-
dinate different tasks. In this paper, a knowledge representation for coordination is

proposed in order to construct a coordinator robot, which can generate strategies for
implementing coordination.
A description world is built for the physical domain world on coordination. Con-
cerning human requests, in the proposed knowledge representation there is an inter-
preter to interpret human requests given by various patterns, such as language, writ-
ing, gesture, etc., and transform them into the pre-defined format. By interpreter, it
should get the information on the object, required services, change of events and
properties specification so that the coordination model can be correctly constructed.
For the problem domain, various kinds of coordination interfaces are defined to de-
scribe various kinds of information related to the problem. Coordination policies,
corresponding to the solution domain, are defined to provide effective policies for
solving problems. Based on coordination policies, controllers for the sensor domain
are developed to perform the tasks according to human requests. These items can
form a hierarchy structure of the description world. The top is the interpreter for hu-
man requests and the bottom is the controller for sensor domain. This hierarchy can
represent the process of coordination like the domain world. In addition, it can repre-
sent the relations among components of the description world. In the following sec-
tions, as the core of the description world, the coordination interface and the coordi-
nation policy are respectively defined in detail.
2.2 Coordination Interface
The definition of coordination interface is to describe the problem domain in the
physical domain world. In order to identify and understand problems, declare what a
human person is expecting in the way it has been designed to control it, so that to find
out good solutions for the problems, coordination interface is defined for the problem
domain. The coordination interface consists of concept definition, services and events
assignment, and properties description. The meanings of them are explained as be-
low.
• Concepts: represent the objects of the problem domain offered from human
requests. It was indicated by the name of the coordination interface. It has many
types, such as human, animal, plant, instrument, furniture, image, etc.
• Services: identify operations that the domain must provide for the human person
to invoke. The types of services have action, speech, writing, etc.
• Events: identify state transitions that the human person needs to be able to detect
in the problem domain, such as spatial position, temporal state, shape, compo-
nent, etc.
• Properties: illustrate the kinds of assumptions that can be made and the implica-
tions that they have, such as logical relation, restriction, conflict, scope of prob-
lem, etc.
2.3 Coordination Policy
The definition of coordination policy is to describe the solution domain in the physi-
cal domain world. The components of coordination policy comprise of required coor-
dination interface, attributes of the policy, arguments, and coordination rules. The
meanings of them are explained as below.
• Coordination interface: identify and understand the problem, declare what the
human person is expecting.
• Attributes: declare features that are local to the policy itself that facilitate the
definition of the scheduling of the different rules, such as actions, status, results,
tasks, etc.
• Parameters: declare some values which would be adopted for describing coor-
dination rules, such as numerical, logical, variable, functional parameters, etc.
• Rules: describe the schedule of the behavior of the solution domain. The rules
are given by three items: (1) “when”: specify the trigger of operations; (2)
“with”: specify the condition defined over the internal state of the policy; (3)
“Do”: a set of operations, each of which is either a service or an update.
3 Robot Behavior Planning by a Coordinator Robot
3.1 Modeling for Robot Behavior Planning
Based on the knowledge representation of coordination, a coordinator robot can be
constructed and robot behaviors can be planned for different tasks. In this paper, an
example is used to explain how to model the coordination of tasks which including
the coordination polices for planning robot behaviors. The example discussed here is
about a case of activity between an elderly or disable person with robots.
In an elderly or disable person’s daily life, several basic activities are expected to
carry out by various types of robots, as give in table 1. For instance, a coordinator
robot “CoRobot” can greet a person, recognize a person and get person’s name. A
mobile robot “MobRobot” can move to a specific place along person’s requests and
bring something for a person. An entertainment robot “EntRobot” can play with a
person.
Table 1. List of tasks for human requests
No. Tasks Executors
1 Greet a person CoRobot
2 Recognize a person CoRobot
3 Get person’s name CoRobot
4 Move along person’s request MobRobot
5 Bring something for a person MobRobot
6 Play with a person EntRobot
These tasks are first interpreted by the interpreter defined in the coordination
model and transformed into the format to express these tasks. Then, many coordina-
tion interfaces and coordination policies are defined, as listed in table 2. In table 3,
the coordination interface “EntRobot” for an entertainment robot is defined. It in-
cludes services, events and properties. The services possibly provided by an enter-
tainment robot consist of “onSit”, “onStand”, “onLie”, “onWalkForward”, “onWalk-
Backward”, “onTurnLeft”, “onTurnRight”, etc. The events of robot include free and
busy. The properties of robot consists of “(onStand before onWalkForward) and
(Free)”, “(onLie before onSit) and (Free)”, etc. With using this interface for an enter-
tainment robot, many tasks for the activity of playing can be possibly fulfilled by use
of currently developed entertainment robot.
Table 2. List of coordination interfaces and policies
Coordination
interfaces
Person, Environment, Timer, CoRobot, Mo-
bRobot, EntRobot …
Coordination
Policies
Greeting, recognition, GetHumanName, Mov-
ing, BringThings, PlayingWith …
Table 3. Format of coordination interface
Items Contents
Name EntRobot
Services onSit, onStand, onLie, onWalkForward,
onWalkBackward, onTurnLeft, onTurnRight …
Events Free, Busy
Properties (onStand before onWalkForward) and (Free)
(onLie before onSit) and (Free) …
In table 4, the coordination policy “Greeting” is defined. It includes interfaces, at-
tribute, parameter and rules. The interfaces for this policy consist of “CoRobot” and
“Person”. The attribute of this policy is action. There is no parameter for this policy.
The policy includes several rules, expressed by when-with-do format. With use of
this policy, the tasks for greeting can be possibly fulfilled by the current developed
communication robot as well as its additional functions for recognition. The behav-
iors of the communication robot can be planned based on this policy.
Table 4. Format of coordination policy
Items Contents
Name Greeting
Interfaces CoRobot, Person
Attribute Action
Parameter None
Rules When Person.onState(Free)
With CoRobot.onState(Free)
Do CoRobot.onFirstMeet and
CoRobot.onGetHumanName …
3.2 Definition in Software Platform
For implementing a coordinator robot, the knowledge representation of coordination
is defined in a software platform by which the coordinator robot can coordinate vari-
ous tasks and plan robot behaviors. A software platform has been developed recently,
called Software Platform for Agents and Knowledge Management (SPAK) [5]. This
platform provides a central module, which acts as blackboard, knowledge processing
brain, memory, and do the judgment, task planning and execution. Frames and their
slots in SPAK are adopted to define the knowledge representation of coordination.
Connecting with the root of the model are frames of “HumanRequests”, “Interfaces”,
“Policies”, etc.
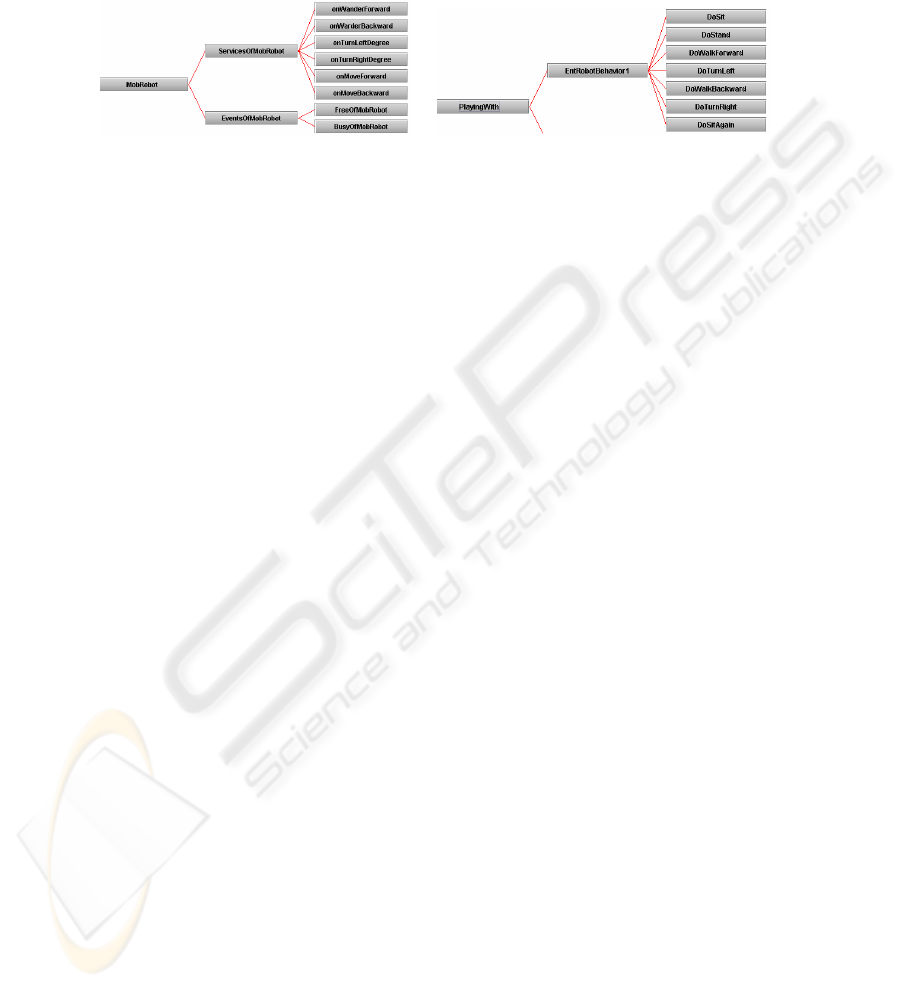
(a) Interface frame module for “MobRobot” (b) Policy frame module for “PlayingWith”
Fig. 1. Definition of coordination interface and policy in SPAK
For each coordination interface, an interface frame module is defined, respectively
including frames for services and events, slots for properties, etc. Figure 1(a) illus-
trates an interface frame module for interface “MobRobot”. For each coordination
policy, a policy frame module is defined, mainly including Do frames and condition
slots, special slots, etc., corresponding to the rules using various services defined in
interfaces, parameters, etc. Figure 1(b) illustrates a policy frame module for policy
“PlayingWith”. Besides, the execution of these frames for coordination is by use of
the inference engines defined in SPAK. The inference engines are for doing forward
and backward chaining [5]. In SPAK, frames and their slots are written by use of
XML format. The example of the definition of frames in SPAK by use of XML for-
mat can be found in our previous paper [6]. Corresponding to XML file, there is an
interpreter to translate XML specification into relative commands.
4 Experiment
4.1 Experiment Setup
In order to demonstrate the effectiveness of the proposed method for planning robot
behaviors by a coordinator robot, the experiment has been carried out by use of actual
robots. The experimental system is mainly comprised of SPAK, intelligent agents and
three types of robots: (1) Robovie: a humanoid robot to play the role of coordinator
robot, called “CoRobot” in the example, (2) Scout: a mobile robot called “MobRo-
bot”, (3) AIBO: an entertainment robot called “EntRobot”.
All robots are connected with SPAK via wireless TCP/IP network. Since the server
computer of Robovie is embedded into the body of Robovie, but SPAK is a platform
to manage the knowledge for coordination, SPAK must install in a stand-alone server
computer with intelligent agents. The agents include a server agent, a user agent,
three robots agents, a sentence parser agent, etc. A sentence parser was developed for
interpreting human language. A user agent represents each user on the system, relays
commands from the user to other agents, queries states of the robot agents, and pro-
vides the user with enough feedback information. A robot server represents each
robot under control.
4.2 Results
According to the knowledge representation of coordination, a coordinator robot is
defined in SPAK by use of XML format. Each frame is represented by a click-able
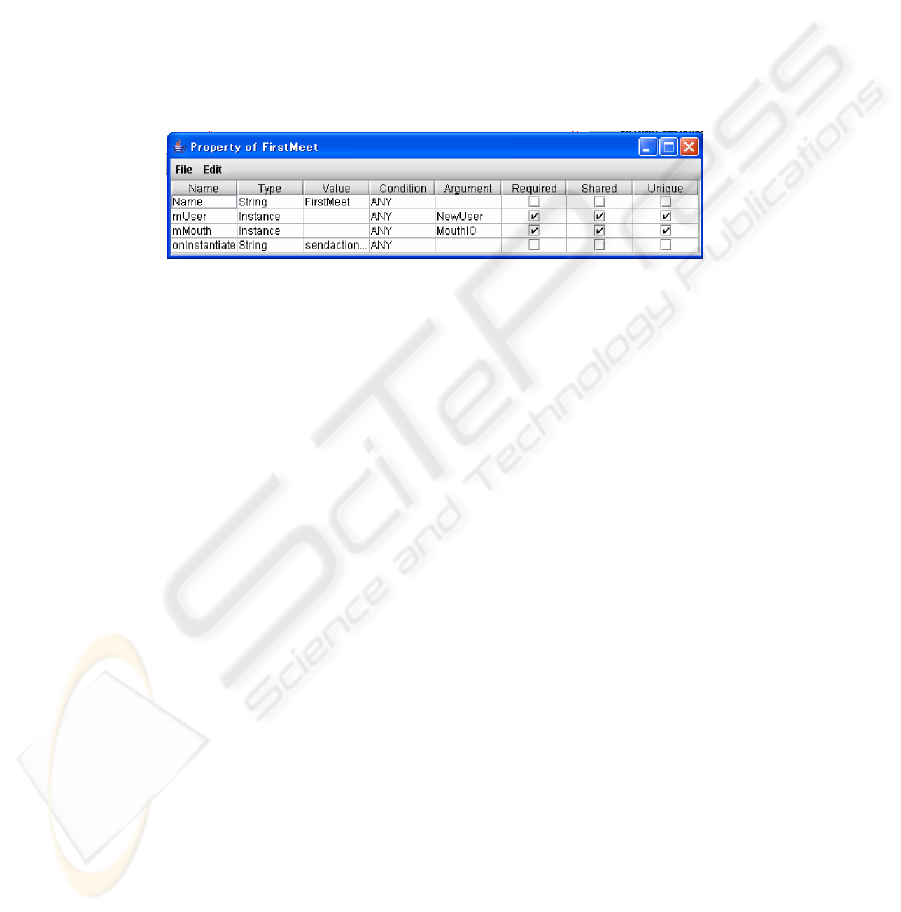
button. Figure 2 is a slot editing table for the frame “FirstMeet”. Each row represents
a slot in this frame. For this frame, if two instances (“NewUser” and “MouthIO”) are
set up, this frame will be activated and execute the JavaScript codes written in “onIn-
stantiate” slot. In this slot, special functions “sendaction()” for Robovie action and
“sendmsg()” for Robovie speech are defined as the values of this slot.
Fig. 2. Slot editing table for the frame “FirstMeet”
Through interaction between Robovie and users by means of speech and gestures,
human requests can be obtained by SPAK. The relative frames for coordination inter-
faces and coordination policies in SPAK will be activated and the robot behaviors can
be planned and conducted. For instance, the task of “Play with a person” can be
planned as the following process. In the frame “Policies”, the frame “PlayingWith”
includes several behaviors of “EntRobot” AIBO for playing. If the coordination pol-
icy for behavior No.1 is selected, the sub-frames of frame “EntRobotBehavior1” are
selected as the rules for planning behaviors of AIBO, as illustrated by Figure 1(b).
Based on these Do frames, SPAK can create instances of these frames in which con-
tain the command to AIBO actions. When creating these instances, a lot of informa-
tion stored in SPAK can be used to adapt to the variable situations. For instance,
when AIBO should move to somewhere, SPAK can plan the routes of movement.
Finally, the instances of Do frames can form a robot action series so that AIBO can
perform the task “Playing with a robot” by its actions.
With this approach, all tasks given in table 1 can be performed. In the future, more
complex tasks in a symbiotic autonomous human-robot system can be implemented
with the improvement of functions of intelligent robots.
5 Conclusions
A new robot behavior planning method by a coordinator robot is proposed in this
paper for a symbiotic autonomous human-robot system. A coordinator robot is con-

structed based on a description world used to model a physical domain world on
coordination. According to coordination policies, robot behaviors can be planned
according to human requests. By means of SPAK and distributed intelligent agents, a
coordinator robot can be implemented and robot behaviors can be planned. The ex-
periment demonstrates the effectiveness of the proposed method. The constructed
coordinator robot and its function for planning robot behaviors will be great signifi-
cant for realizing advanced symbiotic autonomous human-robot system in the future.
References
1. Ueno, H.: A knowledge-based information modeling for autonomous humanoid service
robot. IEICE Transactions on Information and Systems, E85-D (2002) 657-665.
2. Ingrand, F., and Despouys, O.: Extending procedural reasoning toward robot actions plan-
ning. Proceedings of IEEE International Conference on Robotics and Automation. 1 (2001)
9-14.
3. Lee, J. B., and Arkin, R. C.: Adaptive multi-robot behavior via learning momentum. Pro-
ceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. 2 (2003)
2029-2036.
4. Lopes, S., Lau, L. N., and Reis, L. P.: Intelligent control and decision-making demonstrated
on a simple compass-guided robot. Proceedings of the 2000 IEEE International Conference
on Systems, Man and Cybernetics, Nashville, Tennessee, (2000) 2419-2424.
5. Ampornaramveth, V., Kiatisevi, P., and Ueno H.: SPAK: Software Platform for Agents and
Knowledge Systems in Symbiotic Robots. IEICE Transactions on Information and System,
E87-D (2004) 886-895.
6. Zhang, T., Hasanuzzaman, Md., Ampornaramveth, V., Kiatisevi, P., and Ueno, H.: Human-
robot interaction control for industrial robot arm through software platform for agents and
knowledge management. Proceeding of 2004 IEEE International Conference on Systems,
Man and Cybernetics, Hague, Netherlands, (2004) 2865-2870.
