
A CONTROL SYSTEM USING BEHAVIOUR HIERARCHIES
AND NEURO-FUZZY APPROACH
Dilek Arslan, Ferda N Alpaslan
Middle East Technical University, Computer Engineering Department, 06531 Ankara, Turkey
Keywords: Behaviour hierarchy, behaviour-based robotics, neuro-fuzzy systems, autonomous navigation.
Abstract: In agent-based systems, especially in autonomous mobile robots, modelling the environment and its changes
is a source of problems. It is not always possible to effectively model the uncertainty and the dynamic
changes in complex, real-world domains. Control systems must be robust to changes and must be able to
handle the uncertainties to overcome this problem. In this study, a reactive behaviour based agent control
system is modelled and implemented. The control system is tested in a navigation task using an
environment, which has randomly placed obstacles and a goal position to simulate an environment similar
to an autonomous robot’s indoor environment. Then the control system was extended to control an agent in
a multi-agent environment. The main motivation of this study is to design a control system, which is robust
to errors and is easy to modify. Behaviour based approach with the advantages of fuzzy reasoning systems
is used in the system
1 INTRODUCTION
Since the growing interest in agent based systems,
many methods were developed for controlling
autonomous intelligent agents, which are widely
used for problem solving in Artificial Intelligence
(AI). These methods can be categorized as
deliberative and reactive approaches.
Deliberative approach, which is the classical way of
controlling autonomous agents, relies on global
planning method. A deliberative agent decides on
which actions to take, by considering information
about previous experiences and an overall goal as
well as information from its current
perception/situation.
However, deliberative approach has some
drawbacks. For example, in a dynamic environment,
some of the information, that agent remembers from
a previous experience may become invalid as the
environment changes. If a task is highly structured
and predictable it makes sense to use a deliberative
approach. But in complex, real-world domains
where uncertainty cannot be effectively modelled,
agents must have a means of reacting to an infinite
number of possibilities.
In reactive approach, actions of the agent are based
completely on the changes of its environment.
Reactive agents don’t use planning or internal
models of the environment. Instead, they respond to
apperception of the real world around them by using
stimuli-response mechanism. Thus, in reactive
approach, there is a direct connection between
agent’s inputs and actions. This causes the main
drawback of reactive approach; uncertain inputs lead
reactive agents into wrong actions.
After subsumption architecture was proposed by
Brooks (Brooks, 1986), behaviour based approaches
became very popular in solving perception errors
and uncertainties of the environment for autonomous
mobile robots.
Use of fuzzy logic (Zadeh, 1965) for dealing with
uncertainties is also proved to be useful in recent
years (Hagras, 2001), (Tunstel, 1996), (Tunstel,
1997), (Saffiotti, 1997), (Tunstel, 2002). Fuzzy
inference systems, unlike classical inference
systems, can express human expert knowledge
222
Arslan D. and N Alpaslan F. (2005).
A CONTROL SYSTEM USING BEHAVIOUR HIERARCHIES AND NEURO-FUZZY APPROACH.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics, pages 222-229
DOI: 10.5220/0001158802220229
Copyright
c
SciTePress

naturally without a need for an analytical model of
the system. Since they don’t need exact
mathematical models, fuzzy inference systems are
powerful tools to be used in uncertain and not
completely known environments.
In fuzzy inference systems, there is not always
expert knowledge available to define the proper
rules and membership functions. To solve this
problem, hybrid methods like neuro-fuzzy systems
and genetic-fuzzy systems were proposed (Jang,
1993), (Lin, 1995), (Ahrns, 1998), Bonarini, 1996),
Godjavec, 2000), (Hagras, 2000). These systems
combine the advantages of fuzzy logic and neural
networks.
In this study, a reactive behaviour based agent
control system is modelled and implemented. The
control system is tested for a navigation task in an
environment, similar to an autonomous robot’s
indoor environment. As a second phase, the control
system is extended to a multi-agent domain were the
agents’ tasks are to search a goal as well as avoide
obstacles and other agent(s). The system uses a
neuro-fuzzy system called Adaptive Network Fuzzy
Inference System (ANFIS) to hold the rule bases of
the behaviours (Jang, 1993). Behaviour hierarchies
proposed by Tunstel (Tunstel, 1997) was used for
the behaviour coordination.
The article is organized as follows. Chapters 2 and 3
give the background about behaviour-based robotics,
and neuro-fuzzy systems. Chapter 4 gives details of
single-agent control architecture and its experiment
results. Chapter 5 gives details of multi-agent
control architecture and its experiment results.
Chapter 6 concludes the study and gives future
work.
2 HIERARCHICAL FUZZY
BEHAVIOUR CONTROL
Controlling agents by using behaviour hierarchies by
Tunstel (Tunstel, 1997) like many other works, is
basically inspired by Brooks’ subsumption
architecture (Brooks, 1986). In this reactive
approach, main idea is to divide a robot’s task into a
finite number of task-achieving behaviours and
arrange these behaviours as a hierarchical network
of distributed rule bases each responsible from a
different part of the overall task.
There are two types of behaviours in the hierarchy:
primitive and composite. Primitive behaviours are,
at the bottom of the hierarchy and they are simple
and self-contained behaviours, which serve a single
purpose. Primitive behaviours are independent from
other behaviours and they focus on a part of the
complex task.
Only primitive behaviours themselves are not
sufficient to perform a complex task. Coordination
among them is needed. Composite behaviours are
used for behaviour modulation. A composite
behaviour controls two or more primitive behaviours
and decides how true it is to let them affect the
overall result of the agent. For example, in a
navigation task, goal seeking can be considered as a
composite behaviour and it may control primitive
behaviours such as “go to a given coordinate” and
“avoid obstacles”.
For behaviour modulation, composite behaviours
use a concept called degree of applicability (DOA),
which is a weighted control decision-making
concept (Tunstel 1997), (Tunstel, 2002). Composite
behaviours produce degree of applicability values
for each primitive behaviour they control. These
DOA values are a measure of instantaneous level of
activation of primitive behaviours. Outputs of each
primitive behaviour are multiplied with its degree of
applicability value before adding this output into the
overall result. Since degree of applicability values
are used as percentages for desirability of the
corresponding primitive behaviours, their values are
between 0 and 1.
DOA values are determined dynamically for each
step of the given complex task. This feature allows
primitive behaviours to influence the overall
behaviour to a greater or lesser degree as required by
the current situation and goal. It serves a form of
adaptation since it causes the control policy to
dynamically change in response to goal information
and inputs taken from the agent’s environment
(Tunstel, 1997).
Behaviour hierarchies can easily be extended to
work in a multi-agent domain by adding some
behaviour to the hierarchy for coordination and
communication with the other agents.
3 ANFIS
ANFIS (Adaptive Network Based Fuzzy Inference
Sytem) is a fuzzy inference system implemented in
the framework of adaptive networks by using a
hybrid learning procedure.
A CONTROL SYSTEM USING BEHAVIOUR HIERARCHIES AND NEURO-FUZZY APPROACH
223
ANFIS was proposed by Jang (Jang, 1993) in 1993.
By using the hybrid learning method of neural
networks and fuzzy inference systems, ANFIS
constructs an input-output mapping based on human
knowledge (by using fuzzy if-then rules which
captures human knowledge easily) and stipulated
input-output data pairs.
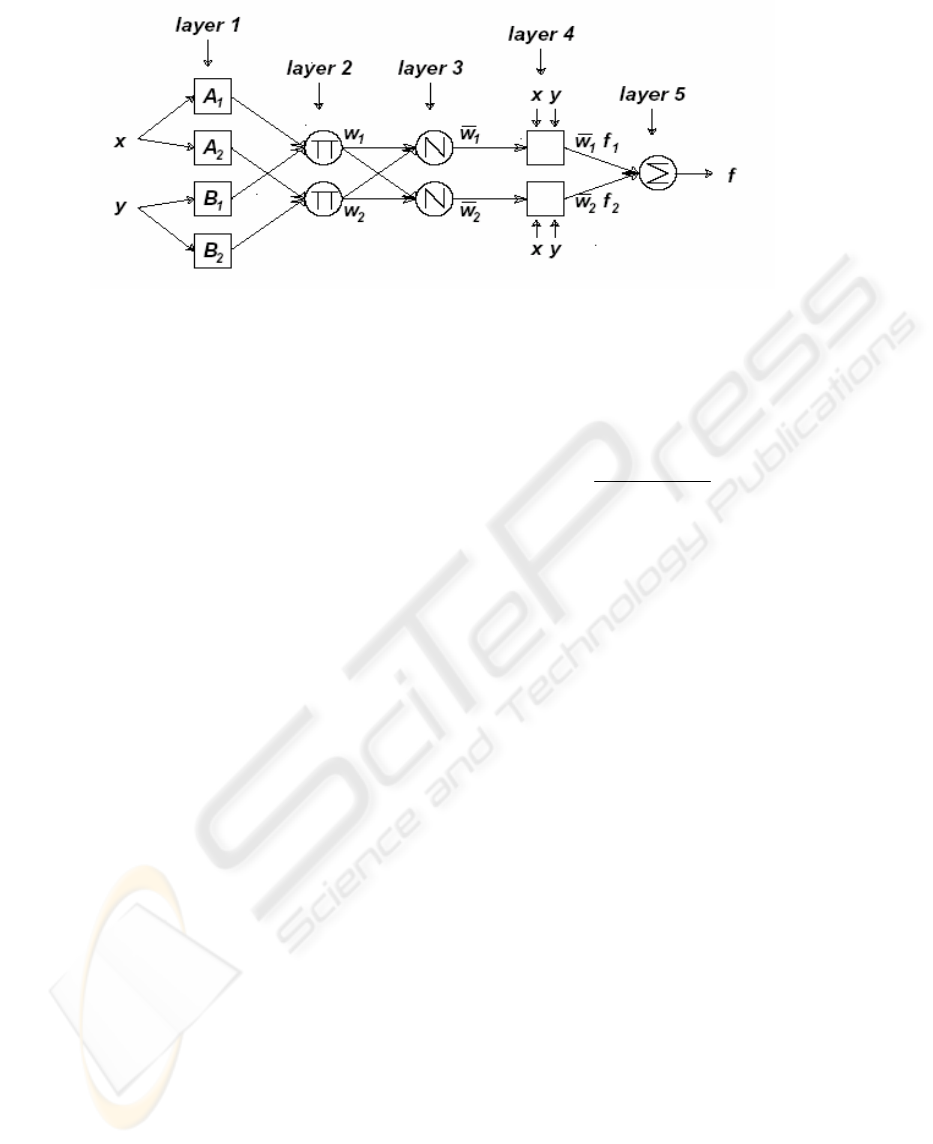
ANFIS is a feed-forward network whose nodes are
connected through weightless links. Some of the
nodes in an ANFIS network are adaptable which has
adaptable parameters. The other type of nodes in
ANFIS architecture is fixed nodes, which have no
adaptable parameters. An example ANFIS
architecture is shown in Figure 1. Adaptive nodes
are shown as square nodes and fixed nodes are
shown as circular nodes in the figure.
4 SINGLE AGENT CONTROL
In this study, behaviour hierarchies and a hybrid
learning method of neural networks and fuzzy
inference systems are combined to implement an
autonomous agent control method. This method
obtains the advantages of fuzzy systems, numerical
systems, and provides flexible control architecture.
Task of the agent is to reach a given goal position
while avoiding obstacles on its way and following
the shortest path to the goal as close as possible.
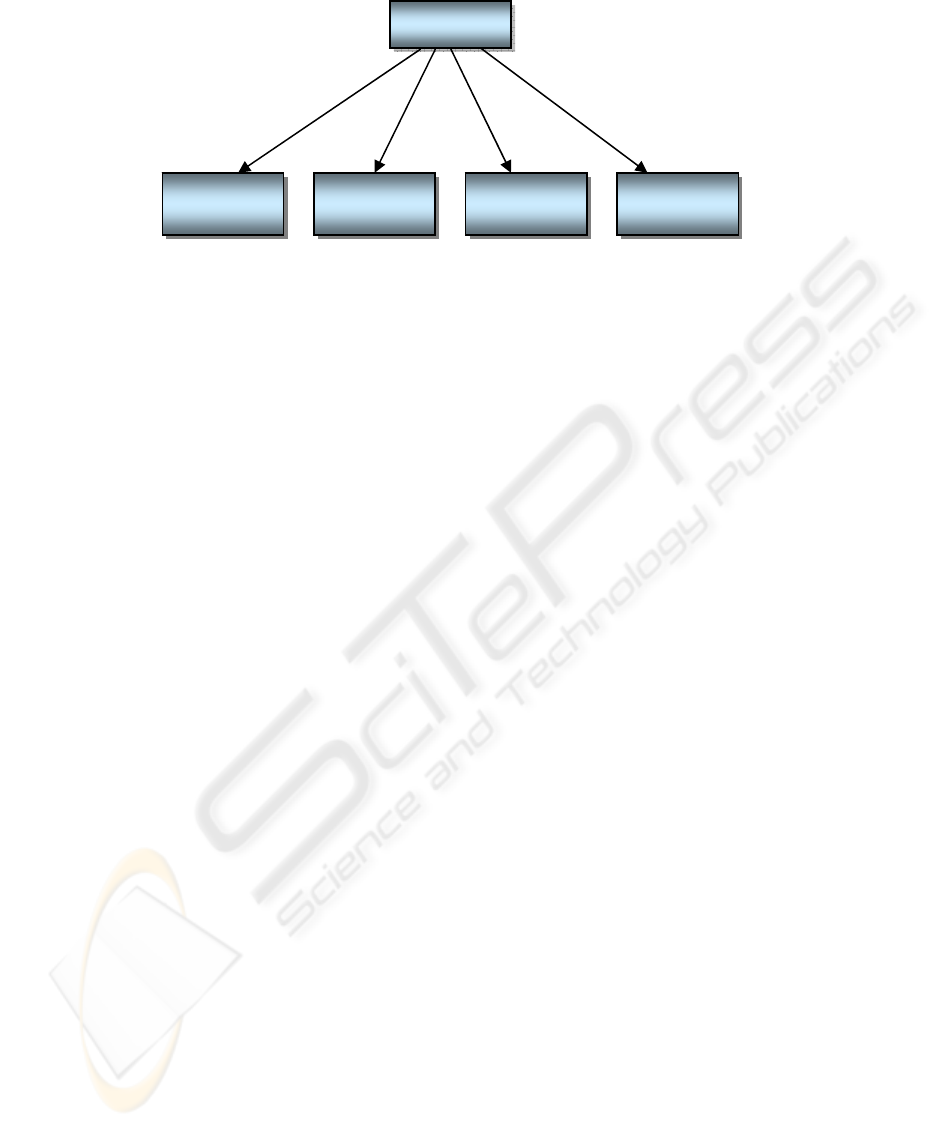
Behaviour hierarchy used to achieve this task is
given in Figure 2.
For learning all the primitive and composite
behaviours in the hierarchy, except Move Randomly
behaviour, ANFIS learning architecture is used in
off-line learning mode.
A hybrid of gradient method and the least squares
estimate is applied in each epoch. This procedure is
composed of a forward pass and a backward pass. In
the forward pass, input data goes forward to
calculate each node’s output and the overall error
measure is calculated. Parameter set of the ANFIS
network, S, is calculated by using the equation
below:
1,....,1,0,
1
11
11
1
−=
+
−=
++
++
+
Pi
aSa
SaaS
SS
ii
T
i
i
T
iii
ii
where
i
S is called covariance matrix.
In the backward pass, the error rates propagate from
the output towards the input layer, and the
parameters in S are updated by the gradient method.
Assuming the given training data set has P entries,
error measure for the pth entry of the training data is
the sum of squared errors;
()
2
)(#
1
,,
∑
=
−=
L
m
L
pmpmP
OTE
where #(L) represents number of layers in the
network,
pm
T
,
is the mth component of pth target
output vector, and
L
pm
O
,
is the mth component of
actual output vector produced by the ANFIS
network. Hence the overall error measure is;
∑
=
=
P
p
P
EE
1
In the training phases of all behaviours, the agent is
placed in random coordinates on a board with
obstacles placed randomly on to get the training data
set. Behaviours in this hierarchy are explained
below;
Avoid Obstacle: This behaviour has three inputs:
distance from the closest obstacle on the left,
distance from the closest obstacle on the right, and
distance from the closest obstacle in front. Obstacle
Avoidance behaviour tends to go to the direction
where obstacle distance is the farthest.
Figure 1: An example ANFIS architecture
ICINCO 2005 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
224
Go To Goal: Inputs to this behaviour are: goal
distance on the left, goal distance on the right, and
goal distance in front. This behaviour tries to go to
the direction where goal distance is the smallest.
Follow Optimum Path:
Inputs of this behaviour
are: distance from the optimum path on the right, on
the left, and in front.
Follow Optimum Path
behaviour, as its name implies, tries to follow the
shortest path to the goal as close as possible.
Move Randomly: This behaviour does not use
any learning technique. It simply produces a random
speed and direction for the next movement. It is used
when the agent gets stuck somewhere and cannot
move.
All four behaviours explained above are simple
primitive behaviours, which deal with only a single
goal. For example,
Go To Goal does not care if there
are obstacles in the direction it chooses to go or
Avoid Obstacle does not know if it gets closer to the
goal or not while trying to escape an obstacle.
Since these behaviours only consider their own
simple goals, another more complex behaviour is
needed to coordinate them. In the hierarchy given
above, the composite behaviour, which coordinates
and controls them, is
Navigate behaviour explained
below.
Navigate: Composite behaviour Navigate controls
four primitive behaviours by finding their
appropriate DOAs in each step of the execution such
that the agent moves towards the goal without
hitting obstacles and follows the optimum path
towards the goal. As the overall task,
Navigate
behaviour uses all the information about
obstacle distances, goal distances, and distances
from the optimum path.
This behaviour can be thought as the combination of
four parts, each controlling a primitive behaviour.
For controlling
Avoid Obstacle behaviour, inputs
used are: the result produced by behaviour
Avoid
Obstacle
, obstacle distance in the direction where
Avoid Obstacle intends to go, and the distance from
the goal position in the current position. This part of
the behaviour tries to produce a Degree of
Applicability (DOA) value for the
Avoid Obstacle
primitive behaviour such that DOA increases as the
agent approaches to an obstacle and decrease as the
agent approaches to the goal.
Second part of the
Navigate behaviour controls
DOA value of
Go To Goal. Inputs of this part are:
the result produced by the behaviour
Go To Goal,
obstacle distance in the direction where
Go To Goal
intends to go, and the distance from the goal location
in the current position. DOA value for the
Go To
Goal
behaviour tends to increase as the agent gets
closer to the goal and decreases as the agent gets
closer to an obstacle.
Third part of the behaviour controls
Move Randomly
behaviour and produce its DOA value. Inputs of this
part are: distances between the current position and
the position two steps ago, four steps ago, and six
steps ago. DOA of
Move Randomly behaviour tends
to increase as these distances get smaller.
Fourth and the last part of the
Navigate behaviour
controls, DOA of
Follow Optimum Path. Inputs of it
are: the result produced by the
Follow Optimum
Path
behaviour, obstacle distance in the direction
where
Follow Optimum Path wants to go, and
distance from the goal location in the current
position. DOA gets bigger if optimum path is far. If
the agent is already on the optimum path, then DOA
is negative.
Outputs produced by all behaviours are multiplied
by their DOAs and vector summation is used to
combine the results of all behaviours.
Navigate
Avoid
Obstacle
Go To
Goal
Move
Randomly
Follow
Opt. Path
Figure 2: Behaviour hierarchy for controlling single agent
A CONTROL SYSTEM USING BEHAVIOUR HIERARCHIES AND NEURO-FUZZY APPROACH
225
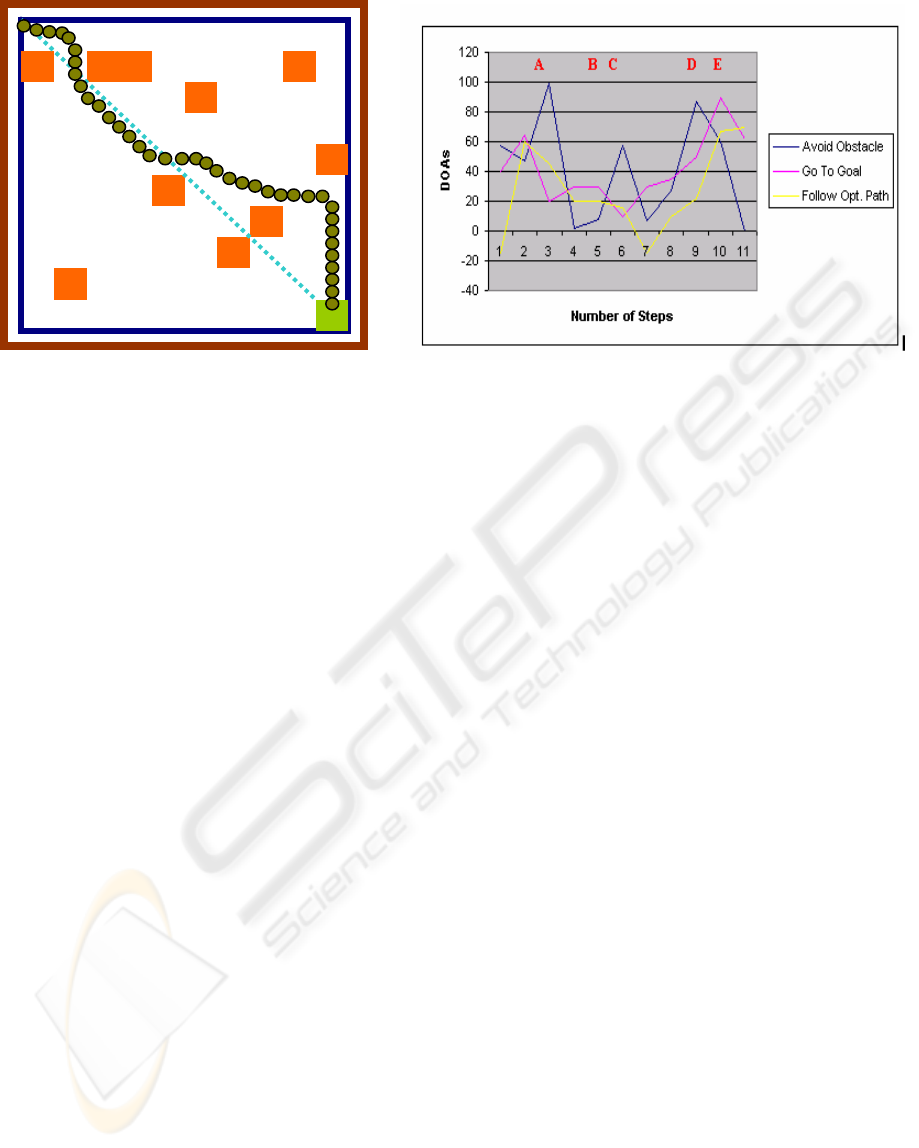
Experiments were carried out in an environment of
size 100x100. The agent’s task is to reach a goal
position without hitting any obsatcles and by
following an optimum path to the goal as close as
possible. Obstacles used in the environment are
static obstacles and are represented by
orangerectangles in Figure 3. The green rectangle on
the figure is the goal. The dashed line on the figure
is the optimum path to the goal when the agent starts
its task from the upper left corner of the board. To
test robustness of the control architecture 10% error
was added to inputs of the behaviours (10% of the
input values were added or subtracted randomly and
these values were used as inputs).
Initial direction of the agent is South. The agent
knows only the distances from the goal, optimum
path and closest obstacles to simulate perception of a
mobile robot. At the starting position, because of the
Avoid Obstacle behaviour, the agent chooses to turn
east (that is agent’s left hand-side). At this point,
since the agent is already on the Optimum Path,
composite behaviour
Navigate chooses to produce a
negative DOA for
Follow Optimum Path behaviour
as shown in Figure 3 and stay in the current position.
When applying
Go To Goal behaviour, both going
forward and left are equally active. However since it
is trained to favour going forward in this case, it
chooses to go forward. Because the obstacle is close,
Avoid Obstacle has the highest DOA and the agent
turns left. It still goes forward slightly because of the
Go To Goal behaviour. The points where the agent
changes direction are marked on both the agent’s
path and the graph, which shows DOAs of the
behaviours. Agent’s behaviour at these points is
explained below.
At point A, direction is East.
Avoid Obstacle and
Follow Optimum Path choose to turn right, but Go
To Goal
still chooses going forward. At this point,
the distance from the obstacle in the direction where
the agent is to go determines the DOA because
output of the
Follow Optimum Path is greater than
the obstacle distance in that direction. DOA is
chosen as the highest value possible to prevent the
agent hitting the obstacle. DOA of
Go To Goal also
is determined according to distance from the closest
obstacle in that direction. DOA of
Avoid Obstacle is
very high because of close obstacles.
At point B, the direction is South. Since there are no
obstacles close to the agent on the left, right, and in
front, DOA of
Avoid Obstacle is relatively small.
Again because there are no close obstacles, DOA of
Follow Optimum Path is determined by the distance
from the optimum path. Since the agent is not very
far from the optimum path, DOA at this point is not
high but it still affects the overall behaviour and
causes the agent to go left. The distance from the
goal also determines DOA of
Go To Goal and it is
higher than the previous step’s DOA since the agent
is getting closer to the goal.
Go To Goal behaviour
causes the agent to go forward at this point.
At point C
Avoid Obstacle becomes dominant again
as the agent approaches a new obstacle. Since
distance from the optimum path remains the same,
DOA of
Follow Optimum Path does not change
much. DOA of
Go To Goal is small in this step
because this behaviour chooses the agent to go
towards the obstacle and its DOA is determined by
the distance from the obstacle.
At point D again DOA of
Avoid Obstacle increases
because of decreasing distance from the obstacle.
Since the goal is getting quite close, DOA of
Go To
Goal
begins to increase.
A
B
C
D
E
Figure 3: Experiment results for single agent control
ICINCO 2005 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
226
t point E the most dominate behaviour is Go To
Goal
since the goal is closer now. In spite of this
fact, DOA is not increased fast in order not to hit the
wall. Because the agent is getting close to the goal,
DOA of
Avoid Obstacle gets smaller. This is needed
for the
Obstacle Avoidance behaviour to not to
prevent the agent from reaching the goal by moving
it away from the walls of the board.
5 MULTI-AGENT CONTROL
As the second phase of the study, the control method
for a single agent explained in the previous sections
was extended to control the agents in a multi-agent
architecture. Task of the agents is to search the goal
while avoiding obstacles on their way. This time the
agents must learn to avoid the other agents too to
prevent collisions and keep the agents apart so that
they can search different parts of the board to find
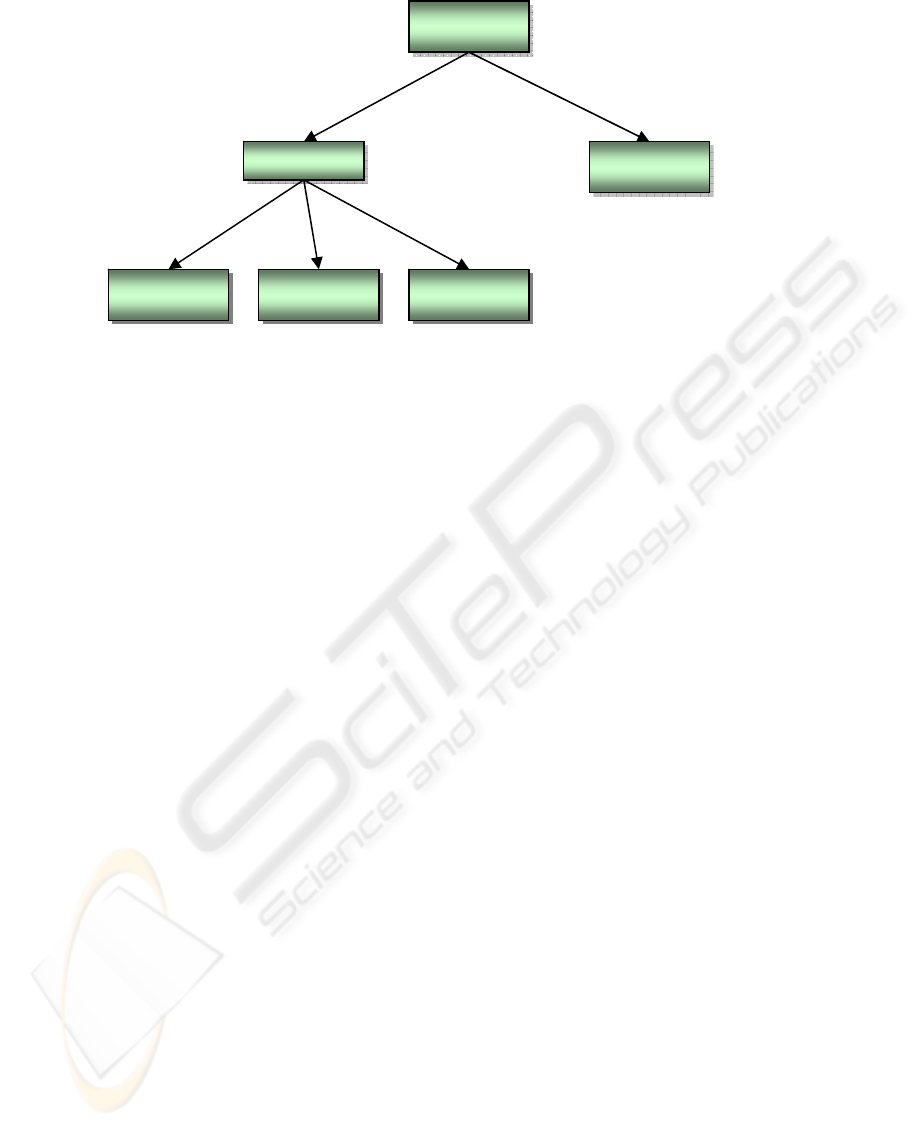
the goal. Behaviour hierarchy used is given in
Figure 4.
The newly added behaviours are as follows:
Avoid Agent: This behaviour prevents the agents
to collide and get close to each other so that they can
search different parts of the board. This primitive
behaviour allows agents to share the search space
somehow.
Search Goal: This composite behaviour has two
parts to control behaviours
Navigate and Avoid
Agent
. The first part controls Avoid Agent behaviour
and has four inputs; output produced by the
primitive behaviour
Avoid Agent, obstacle distance
in the direction
Avoid Agent wants to go, goal
distance and the distance from the closest agent.
Second part of the Search Goal produces a DOA
value for Navigate. DOA it produces is complement
of the
Avoid Agent’s DOA.
Experiments were carried out in the same
environment defined in section 4. The obstacles used
in the environment are static obstacles but the agents
move around the board and they can be considered
as dynamic obstacles for the other agent(s). Two
agents were used for this experiment. The agents
start at locations (40, 0) and (80, 0) of the board. The
goal location they are supposed to find is the lower
right corner of the board. The results of the
experiments are shown in Figure 5.
The path shown in pink is the path Agent-1 follows
through the experiment. The path shown in green is
the path of Agent-2. The experiment stops when at
least one agent reaches the goal position.
Initial directions of both agents are South. Numbers
on the figure shows number of steps of the agents.
Green numbers belong to Agent-1 and red numbers
belong to Agent-2. At the starting position (point-1),
because the agents barely see each other,
Avoid
Agent
behaviour is not much
Navigate
Avoid
Obstacle
Go To Goal
Move
Randomly
Search Goal
Avoid
Agent
Figure 4: Behaviour hierarchy for multi-agent control
A CONTROL SYSTEM USING BEHAVIOUR HIERARCHIES AND NEURO-FUZZY APPROACH
227
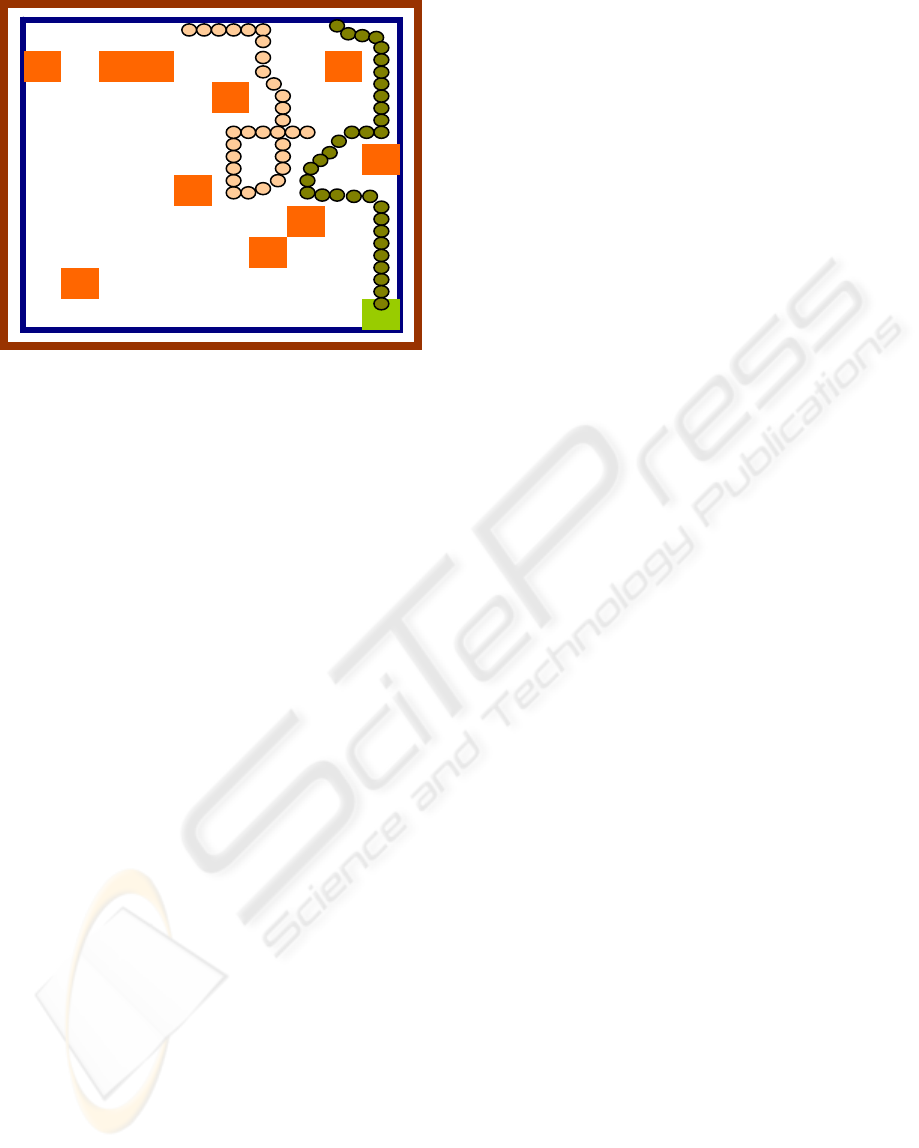
Figure 5: Experiment results for multi-agent control
active. In this position, the most dominant behaviour
is
Move Randomly.
At point-2, since the agents get closer, they begin to
see each other and
Avoid Agent behaviour gets more
dominant. Because of this behaviour, both of the
agents change their direction to go away from each
other.
At point-3, Agent-1 is oriented by the
Avoid
Obstacle
behaviour and changes its direction to
move away from the obstacle but Agent-2 keeps
going towards the only direction it would not
approach Agent-1 and hit walls of the board.
At point-4, Agent-2 is guided by the
Avoid Obstacle
behaviour and Agent-1 goes forward to not to
approach Agent-2 on the left and the obstacle on the
right.
At point-5, both
Avoid Obstacle and Avoid Agent
behaviours dominate Agent-2. So the agent goes
towards a direction which is a composition of these
two behaviours and ends up going South to avoid
Agent-1 and going West to avoid the obstacle. For
Agent-1, both
Avoid Obstacle and Avoid Agent
behaviours choose to go towards West.
At point-6, both agents are controlled mostly by
Avoid Obstacle behaviour. At point-7 while Agent-1
is still controlled by
Avoid Obstacle behaviour,
Agent-2 begins to see the goal. Because of both
Avoid Obstacle and Go To Goal behaviours, it turns
towards south.
At points 8 and 9 Agent-1 is controlled by
Move
Randomly
behaviour because there are no close
obstacles and agents around. Agent-2 is now very
close to the goal and it is controlled by only
Go To
Goal
behaviour.
6 CONCLUSION
Fuzzy controllers have been widely used in robotics
applications in recent years, because there is usually
uncertainty in the inputs and it is not possible to
obtain a model of the environment. Another
advantage of using fuzzy logic in robot controllers is
the convenience it provides to represent human
knowledge without a need for analytical model of
the system.
In this study, a behaviour-based control strategy
using ANFIS neuro-fuzzy learning approach is
presented. Fuzzy behaviour hierarchies are used to
combine the behaviours in the system. It resulted in
a system robust to errors in input data, and easy to
modify by
adding new behaviours to the hierarchy.
The agents using this control architecture
successfully navigate in simulated indoor-like
environments with both static and dynamic obstacles
in it and find and reach goal positions.
This study has an advantage over the previous
studies, which apply fuzzy behaviour hierarchies [4,
6] in finding and tuning the membership functions,
which is usually done this by trial. In this study, the
membership functions are found and tuned by
ANFIS automatically.
As a future work, multi-agent control architecture in
the second phase of the study can be improved by
adding new behaviours to the system. For example,
a new behaviour can be added for the agents to share
the information they have with the other agent or
share their tasks. As another improvement ANFIS
system can be used in on-line learning mode to adapt
the agent to the changes in the environment.
The control architecture presented in this study is
tested in a simulated environment. As another future
work, the study can be tried on a real mobile robot
and in real world problems like tasks of finding a
target location in an unknown environment.
REFERENCES
Ahrns, I., J. Bruske, G. Hailu, and G. Sommer, 1998.
Neural fuzzy techniques in sonarbased collision
avoidance. Soft Computing for Intelligent Robotic
Systems, pages 185–214. Physica.
Bonarini, A., 1996.
Evolutionary learning of fuzzy rules:
competition and cooperation
. Fuzzy Modeling:
Paradigms and Practice, pages 265–284. Kluwer
Academic Press, Norwell, MA.
1
1
2
2
3
4
5
6
7
8
9
4
5
6
7
8
9
3
ICINCO 2005 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
228

Brooks, R. A., 1986. A Robust Layered Control System
for a Mobile Robot.
IEE Journal of Robotics and
Automation
, Vol. RA-2, No.1, pp 14-23.
Godjavec, J., N. Steele, 2000. Neuro-fuzzy control for
basic mobile robot behaviors.
In Fuzzy Logic
Techniques for Autonomous Vehicle Navigation, pages
97–117.
Hagras, H.,V. Callaghan, and M.Colley, 2000.
Learning
fuzzy behavior co-ordination for autonomous multi-
agents online using genetic algorithms and real-time
interaction with the environment.
Fuzzy IEEE.
Hagras, H., V. Callaghan, 2001. A Hierarchical Fuzzy-
Genetic Multi-Agent Architecture for Intelligent
Buildings Online Learning, Adaptation and Control.
International Journal of Information Sciences.
Jang, Jyh-Shing R., 1993. ANFIS: Adaptive-Network-
Based Fuzzy Inference System.
IEEE Trans. Systems,
Man & Cybernetics, Vol. 23, pp 665-685.
Lin, Y., G. Cunningham, 1995. A New Approach to
Fuzzy-Neural System Modeling.
IEEE Transactions
On Fuzzy Systems
. Vol.3, No.2.
Saffiotti, A., 1997. The Use of Fuzzy Logic for
Autonomous Robot Navigation. Soft Computing, Vol.
1(4), pp 180-197.
Tunstel, E., M. Jamshidi, 1996. On Genetic Programming
of Fuzzy Rule-Based Systems for Intelligent Control.
International Journal of Intelligent Automation & Soft
Computing
, Vol.2 No.3, pp. 273-284.
Tunstel, E., T. Lippincott, M. Jamshidi, 1997. Behaviour
Hierarchy for Autonomous Mobile Robots: Fuzzy-
Behaviour Modulation and Evolution.
International
Journal of Intelligent Automation & Soft Computing
,
Vol.3, No.1, Special Issue on Autonomous Control
Engineering, pp. 37-50.
Tunstel, E., M. Oliveira, S. Berman, 2002. Fuzzy
Behaviour Hierarchies for Multi-Robot Control.
International Journal of Intelligent Systems, Vol.17
449-470..
Zadeh, L. A., 1965. Fuzzy Sets.
Information and Control,
No. 8, pp. 338-353.
A CONTROL SYSTEM USING BEHAVIOUR HIERARCHIES AND NEURO-FUZZY APPROACH
229
