
MODEL PREDICTIVE CONTROL FOR DISTRIBUTED
PARAMETER SYSTEMS USING RBF NEURAL NETWORKS
Eleni Aggelogiannaki, Haralambos Sarimveis
School of Chemical Engineering,NTUA, 9 Heroon Polytechniou str. Zografou Campus, 15780 Athens, Greece
Keywords: Distributed parameter systems, Model Predictive Control, Radial Basis Function Neural Networks.
Abstract: A new approach for the identification and control of distributed parameter systems is presented in this
paper. A radial basis neural network is used to model the distribution of the system output variables over
space and time. The neural network model is then used for synthesizing a non linear model predictive
control configuration. The resulting framework is particular useful for control problems that pose
constraints on the controlled variables over space. The proposed scheme is demonstrated through a tubular
reactor, where the concentration and the temperature distributions are controlled using the wall temperature
as the manipulated variable. The results illustrate the efficiency of the proposed methodology.
1 INTRODUCTION
In distributed parameter systems (DPS) inputs,
outputs as well as parameters may change
temporally and spatially due to diffusion, convection
and/or dispersion phenomena. Such systems are
quite common in chemical industries (tubular
reactors, fluidized beds and crystallizers) and are
mathematical described by systems of partial
differential equations (PDE), where time and spatial
coordinates are the independent variables.
The conventional approach for the synthesis of
implementable control schemes for DPSs is based on
methodologies that reduce the infinite order model
to a finite (low) order model, which can capture the
dominant behavior of the system. A comprehensive
analysis of the recent developments in this direction
can be found in Christofides (2001a). The most
common approach found in the literature for an
accurate model reduction implements a linear or a
non linear Galerkin method to derive ODE systems
that capture the slow (dominant) modes of the
original DPS. In Christofides (2001b) one can find
the analytical description of the linear Galerkin
procedure as well as the nonlinear model reduction
method which implements the concept of
approximate inertial manifold. The resulting models
are then used for synthesizing low dimensional
robust output feedback controllers for quasi linear
and nonlinear parabolic systems (Christofides and
Daoutidis, 1996; 1997; Christofides, 1998;
Shvartsman and Kevrekidis, 1998; Christofides and
Baker 1999; Chiu and Christofides, 1999; El-Farra
et al., 2003; El-Farra and Christofides, 2004).
However, the analytical solution of the
eigenvalue problem of the spatial differential
operator is not always possible and consequently the
selection of the appropriate basis to expand the
PDEs is not an easy task. A systematic data driven
methodology to address this problem is the
Karhunen-Loève expansion (KL), also called proper
orthogonal decomposition (POD) or empirical
eigenfunctions (EEF) or principal component
analysis. The KL expansion uses data snapshots and
constructs the empirical eigenfunctions as a linear
combination of those snapshots (Newman, 1996a;
1996b; Chatterjee, 2000). The resulting EEFs have
been used as basis functions in the Galerkin
procedure in a number of publications for accurate
modelling and control in one-dimensional or two-
dimensional systems. (Park and Cho, 1996a; 1996b;
Park and Kim, 2000; Baker and Christofides, 1999;
Shvartsman and Kevrekidis, 1998; Armaou and
Christofides, 2002;)
The Galerkin procedure, mentioned so far uses
analytical or empirical eigenfunctions and requires
the mathematical description of the process, namely
the exact system of PDEs. In case the PDEs are
unknown, Gay and Ray (1995) proposed an
identification procedure based on input-output data.
The methodology employs integral equation models
19
Aggelogiannaki E. and Sarimveis H. (2005).
MODEL PREDICTIVE CONTROL FOR DISTRIBUTED PARAMETER SYSTEMS USING RBF NEURAL NETWORKS.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics, pages 19-24
DOI: 10.5220/0001156700190024
Copyright
c
SciTePress

to describe the DPS and the singular value
decomposition (SVD) of the integral kernel to
produce an input/output model, suitable for model
predictive control (MPC) methodologies. A
comparison of the efficiency of this data driven
model with the methods mentioned earlier can be
found in Hoo and Zheng (2001). More recently, an
identification method that combines KL and SVD
for low order modeling and control have been
presented (Zheng and Hoo, 2002; Zheng et al.,
2002a; 2002b; Zheng and Hoo, 2004). The discrete
form of the SVD-KL method has also been used in
MPC configurations with improved performance,
comparatively to linear feedback controllers.
A neural network approach for the identification
of DPSs has been attempted by Gonzáles-García et
al. (1998) and more recently a combination of POD
and neural networks has been proposed by
Shvartsman et al. (2000). Padhi et al. (2001) used
two sets of neural networks to map a DPS and a
discrete dynamic programming format for the
synthesis of an optimal controller. The same
concept, also exploiting the POD technique for a
lower order model, is presented by Padhi and
Balakrishnan (2003).
In the present work, a radial basis function
(RBF) neural network is proposed for the
identification of non linear parabolic DPSs. RBF
neural networks are quite popular for lumped system
modeling because of their comparatively simple
structure and their fast learning algorithms
(Sarimveis et al., 2002). In this paper the RBF
neural network is formulated, so that it is able to
predict the distribution of the output variables over
space. This way, an estimation of the system outputs
is available in any position. The RBF model is then
implemented in a nonlinear MPC configuration to
predict the controlled variables in a finite number of
positions.
The rest of the article is formulated as follows:
In section 2 the structure of the RBF neural network
for DPSs is presented. In section 3 the non linear
MPC configuration is described in more details. The
proposed methodology is tested through the
application described in subsection 4.1 The efficien-
u(t-1)
u(t-2)
u(t-N)
#
#
()
^
1
,ytz
()
^
2
,ytz
()
^
,
no
ytz
w
C
w
1
z
w
2
#
Figure 1: A radial basis function neural network of C
hidden nodes for a distributed parameter system.
cy of the RBF neural network is examined in
subsection 4.2 and the controller performance in 4.3.
In section 5, the final conclusions are summarized.
2 RBF NEURAL NETWORKS
FOR MODELING
DISTRIBUTED PARAMETER
SYSTEMS
2.1 Quasi-linear parabolic DPS
In general, a quasi linear parabolic distributed
parameter system is described by a set of partial
differential equations and boundary conditions of the
form of Eq. (1):
(
)
() ()
() ()()
()
() () () ()
2
2
,
,,,,0
,,
0, , 0
,0 , , , 0
o
ol
tz
tz tz
tzz
tz z tz
zzL
tttLtt
zz
∂
∂∂
=
−+ + >
∂∂∂
=⋅
=≤≤
∂∂
==>
∂∂
υ
υυ
avuG av
yCυ
υυ
υυ
gg
(1)
where
(
)
,tzυ are the state variables,
(
)
,tzu the
manipulated variables and
(
)
,tzy the controlled
variables. G(t,z) is an additional non linear term of
the model and C(z) is a function determined by the
location of the sensors. Vectors υ
o
(z) and g
o
(t), g
l
(t)
describe the initial and the Neumann boundary
conditions of the system, respectively.
2.2 RBF neural network for DPS
Radial basis function networks are simple in
structure neural networks that consist of three layers,
namely the input layer, the hidden layer and the
output layer. Development of an RBF network based
on input-output data includes the computation of the
number of nodes in the hidden layer and the
respective centers and the calculation of the output
weights, so that the deviation between the predicted
and the real values of the output variables, over a set
of training data, is minimized
An RBF neural network for modeling a DPS is
constructed so that it can predict the values of the
output variables at a specific spatial point (Figure 1).
The input vector of such network at time point t=kT
a
(where T
a
is the sample time) contains past values of
the input variables and the coordinates in space,
ICINCO 2005 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
20

where we wish to obtain a prediction:
() ( ) ( ) ( )
, 1 2 ...
T
TT T
tz t t t N z
⎡⎤
=− − −
⎣⎦
xuu u (2)
For simplification we limit our analysis in only
one dimension in space. Generalization to three
dimensions is straightforward.
The neural network output is a vector containing
the values of the process output variables at the
location that is specified in the input vector:
() () () ()
RBF 1 2
, , , ... ,
T
no
tz y tz y tz y tz
∧∧∧∧
⎡⎤
=
⎢⎥
⎣⎦
y
(3)
() ()
(
)
2
,
2
1
,,,1,...,
C
jc c
j
c
ytz w f tz j no
∧
=
=⋅ − =
∑
xx (4)
In the previous equations N is the number of past
values for the input vector, no is the number of the
process output variables, C is the number of hidden
nodes, w
c
is the weight vector corresponding to the
output of the cth node, f is the radial basis function
and x
c
is the center of the c
node. The method
utilized to train neural networks in this work is based
on a fuzzy partition of the input space and is
described in details in Sarimveis et al. (2002).
3 NONLINEAR MPC FOR DPS
The nonlinear MPC configuration that is proposed in
this work for controlling DPSs, uses the RBF model
to predict the values of the controlled variables over
a future finite horizon ph at a number of locations
ns, where measurements are available. Then, an
optimization problem is solved, so that both the
deviations of the controlled variables from their set
points over the prediction horizon and the control
moves over a control horizon ch, are minimized. The
objective function is of the following form:
()
()
2
1
2
,
2
(|)
11 0
2
0,..., 1
min , | |
ph
ns ch
sp
kj j j k
tkt
jk k
kch
tkzt tkk
−
∧
+
== =
=−
⎛⎞
⎛⎞
⎜⎟
+−+∆+
⎜⎟
⎜⎟
⎝⎠
⎝⎠
∑∑ ∑
u
Wy y Ru
(6)
()()()
RBF
,| , ,|,
1,..., , 1,...,
jjj
tkzt tkz tzt
jnsk ph
∧∧
+=++
==
yy d
(7)
min max
(|) , 0,...,1tkt k ch≤+ ≤ = −uu u
(8)
where
()
,|
j
tkzt
∧
+y is the prediction made at time
point t for the output vector at time t+k and at
location z
j
, ns is the number of sensors,
(
)
,|
j
tz td is
the estimated disturbance at time point t, considered
constant over the prediction horizon and
s
p
j
y is the
set point at the location of the j sensor. For
k=ch,…,ph the manipulated variables are considered
to remain constant. W
k
and R
k
are weight matrices
of appropriate dimensions.
4 APPLICATION
4.1 Description of the process
One typical distributed parameter system in
chemical engineering is a tubular reactor, where
variables depend on both time t and reactor length z.
The mass and energy balances, concerning a first
order reaction, diffusion and convention phenomena,
are described by two quasi-linear PDEs with
Neumann boundary conditions (Eqs. (9-(12)).
()
()
2
2
11 1
exp 1 ,
w
eh e
TTT
cTtzT
tPz Lz T
ηγ µ
⎡⎤
∂∂∂
⎛⎞
=−+ −+ −
⎢⎥
⎜⎟
∂∂ ∂
⎝⎠
⎣⎦
(9)
2
2
11
exp 1
a
em
cTc
Dc
tPz z T
γ
⎡
⎤
∂∂∂
⎛⎞
=−− −
⎢
⎥
⎜⎟
∂∂∂
⎝⎠
⎣
⎦
(10)
z=0,
() ( )
,0 ( ) ( ,0)
eh i
T
tPTtTt
z
∂
−=⋅−
∂
, z=1,
()
,1 0
T
t
z
∂
=
∂
(11)
z=0,
() ( )
,0 ( ) ( ,0)
em i
c
tPctct
z
∂
−=⋅−
∂
, z=1,
()
,1 0
c
t
z
∂
=
∂
(12)
where
(
)
,Ttz ,
(
)
,ctz are dimensionless temperature
and concentration respectively inside the reactor,
(
)
i
Tt
,
(
)
i
ct
are dimensionless temperature and
concentration at the entrance of the reactor and
(
)
,
w
Ttz is the wall temperature. The values of the
parameters of Eqs. (9)-(12) can be found in previous
publications (Hoo and Zheng, 2001; 2002).
4.2 RBF model efficiency
An input-output training set was created using the
wall temperature T
w
, at z= [0 0.33 0.66] as the
manipulated variable, while the output variables
(temperature and concentration) were recorded at 21
spatial locations. The PDEs were solved using the
PDE Matlab toolbox. More specifically, we
simulated the system by changing randomly the
input variables and recording the output responses
using a sample period of T
a
=0.5 time units. The
training set consisting of 2000 data points was
generated considering N=3 past values of each
manipulated variable. Deviation variables were used
by subtracting from all the input and output values
MODEL PREDICTIVE CONTROL FOR DISTRIBUTED PARAMETER SYSTEMS USING RBF NEURAL
NETWORKS
21
the corresponding steady states. Several neural
network structures were developed by changing the
initial fuzzy partition in the fuzzy means training
algorithm. The produced neural networks were
tested using a new validation data set of 500 data
that was developed in the same way with the training
set, but was not involved in the training phase. The
sum of squares errors (SSEs) for the different RBF
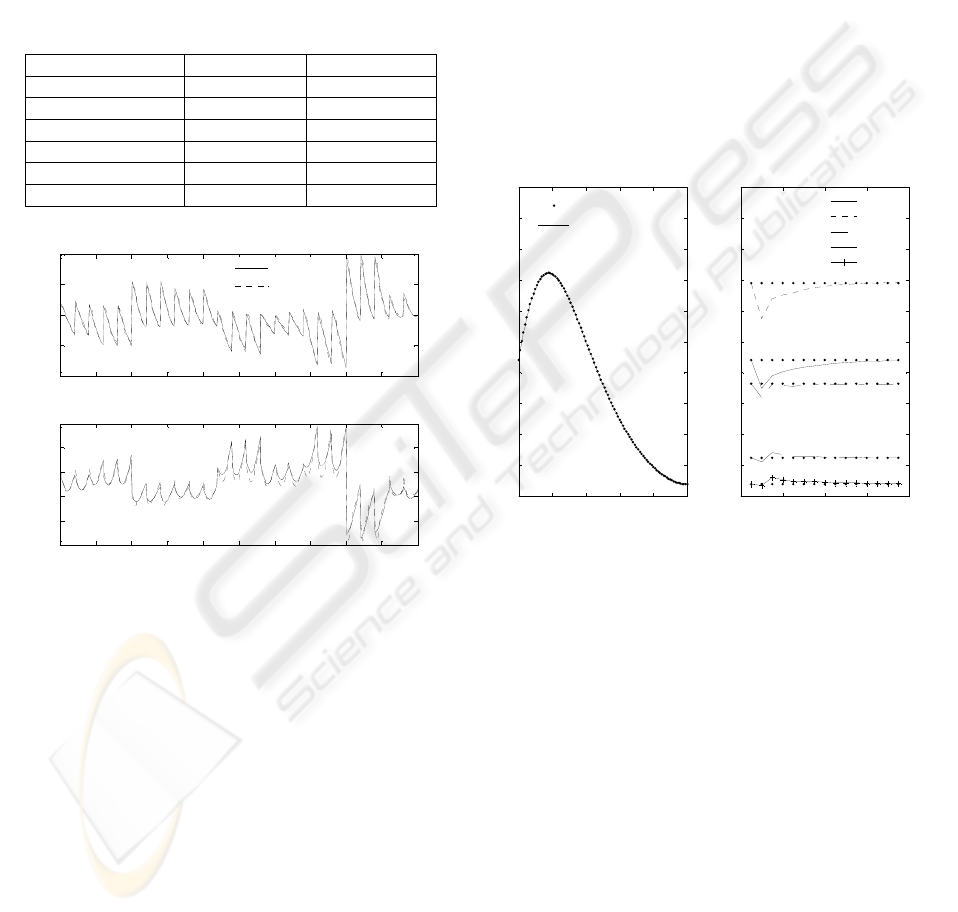
structures are presented in Table 1. In Figure 2, the
actual values and the predictions of the neural
network consisting of 152 nodes are compared.
Table 1: Performance of RBF neural networks
Hidden nodes C SSE T SSE c
13 0.2012 0.8873
27 0.1251 0.7523
68 0.0535 0.3628
86 0.0404 0.2232
152 0.0332 0.1420
207 0.0295 0.1104
0 50 100 150 200 250 300 350 400 450 500
-0.2
-0.1
0
0.1
0.2
Temperature T(t,z)
0 50 100 150 200 250 300 350 400 450 500
-0.4
-0.3
-0.2
-0.1
0
0.1
validation data
Concentration c(t,z)
prediction
real values
Figure 2: Actual values and predictions of the deviation
variables for a neural network consisting of 152 hidden
nodes
4.3 MPC performance
To test the proposed MPC configuration, we first
simulated the example presented in Zheng and Hoo
(2002). In that case, the temperature is the only
controlled variable at z=[0:0.25:1] where we assume
that sensors are available, while concentration is
measured at z=1 but is not controlled. A disturbance
is introduced to the system by decreasing the feed
concentration C
i
by 5%. We tested the proposed
MPC scheme using for prediction the RBF network
that consists of 27 nodes and the following
parameter values: ch=6, ph=10, W=1, R=5·I
3
. The
optimization problem that was formulated at each
time instance was solved using the fmincon Matlab
function. The performance of the controller is
depicted in Figure 3, where the temperature
distributions at the initial steady state and after 7
time units are compared. The responses at locations
where sensors are available are also presented in the
same figure. The proposed controller managed to
reject the disturbance and produce zero steady state
error. The obtained responses outperform the
performances of a PI controller and an MPC
configuration that utilizes the SVD-KL model. The
responses of the two controllers are presented in
Hoo and Zheng, (2002) and are not shown here due
to space limitations. The temperature at the exit of
the reactor returns to its initial value after 1.5 time
units, while 6 time units are required by the system
to produce zero steady state error along the length of
the reactor.
0 0.2 0.4 0.6 0. 8 1
1.02
1.03
1.04
1.05
1.06
1.07
1.08
1.09
1.1
1.11
1.12
lenght z
Temperature at steady state T(z)
0 2 4 6 8
1.02
1.03
1.04
1.05
1.06
1.07
1.08
1.09
1.1
1.11
1.12
time t
T(t,z)
T(t,0 )
T(t,0.25)
T(t,0.50)
T(t,0.75)
T(t,1 )
initial steady state
final steady state
Figure 3: The final temperature distribution and the
dynamic response to a 5% decrease in
C
i
using the RBF
model
A second performance test forces the system to
reach a new steady state distribution. The actual
steady state, where the temperature finally settles, is
compared with the desired set point in Figure 4. The
dynamic responses at locations where sensors are
available are also presented in the same figure. The
responses show that the system approaches the
desired values quickly, avoiding overshoots. The
behavior of the manipulated variables is depicted in
Figure 5.
The last simulation presented in this work uses
concentration at the reactor exit as an additional
controlled variable. As far as the temperature profile
is concerned, the target is to reach the same set point
change as previously. Figures 6 and 7 present the
responses of the temperature (at locations where
sensors are available) and the concentration (at the
ICINCO 2005 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
22
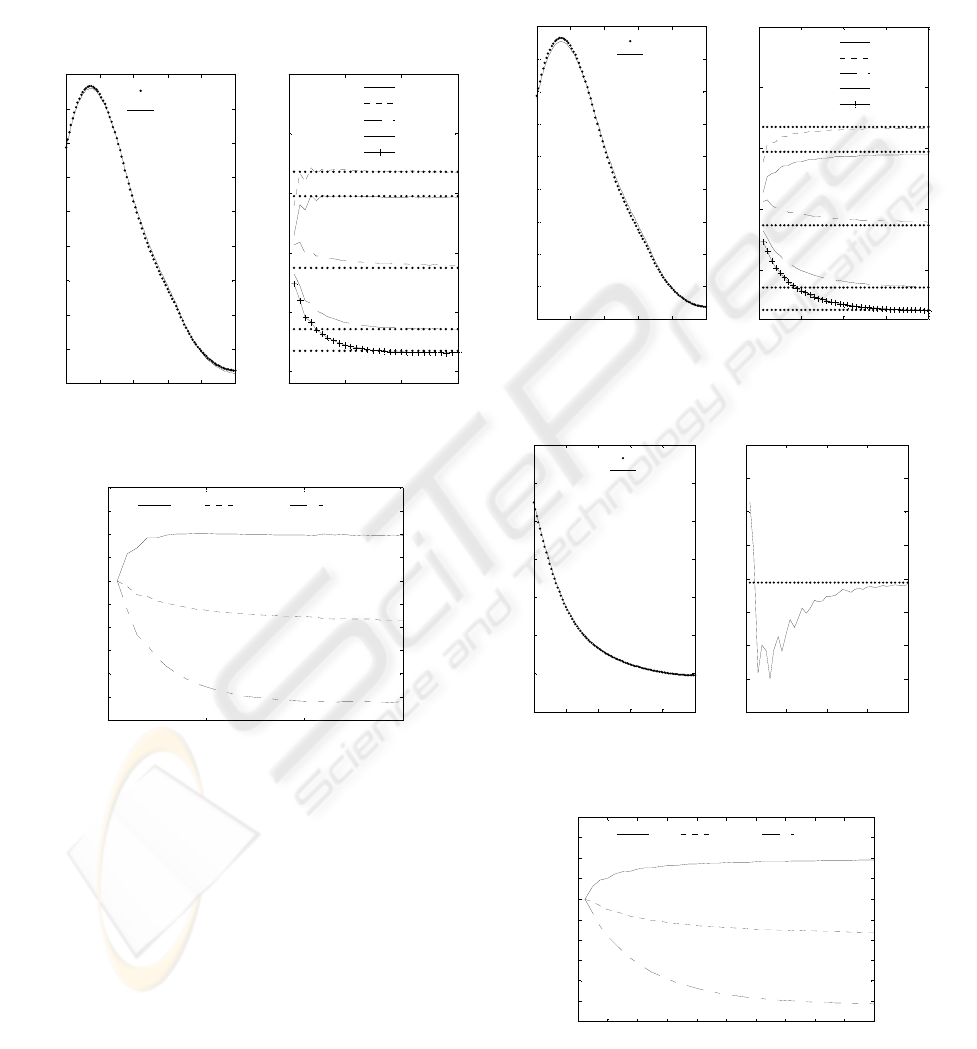
reactor exit) respectively. They also present the final
distribution of both variables, after 20 time units.
Figure 8 depicts the control actions over time. It is
obvious that due to the additional controlled variable
the performance of the controller is slightly
deteriorated as far as the dynamic behavior is
concerned. However, the desired steady state is still
approached satisfactorily.
0 0.2 0.4 0. 6 0.8 1
0.96
0.98
1
1.02
1.04
1.06
1.08
1.1
1.12
1.14
lenght z
Temperature at stedy state T(z)
0 5 10 15
0.95
1
1.05
1.1
1.15
1.2
time t
T(t,z)
setpoint
steady state
T(t,0 )
T(t,0.25)
T(t,0.50)
T(t,0.75)
T(t,1 )
Figure 4: The temperature distribution after 15 time units
and the dynamic response to a set point change
0 5 10 15
0.94
0.95
0.96
0.97
0.98
0.99
1
1.01
1.02
1.03
1.04
Tw(t)
time
z=0 z=0.33 z=0.66
Figure 5: The manipulated variable T
w
(t) at z=0, 0.33 and
0.66
5 CONCLUSIONS
A nonlinear input/output identification method for
distributed parameter systems is proposed is this
paper. An RBF neural network capable to predict the
output variables over space is developed. The
accuracy of the neural network was established
through a tubular reactor simulation. The model is
then used for the synthesis of a MPC configuration
that minimizes the deviation of the prediction of the
controlled variables at a finite number of positions,
where a sensor is assumed to exist. The proposed
method produced satisfactory results in both
disturbance rejection and set point change problems.
The performance of the controller was found to be
superior to PI controllers or linear MPC
configurations presented in former publications.
0 0. 2 0.4 0. 6 0.8 1
0.96
0.98
1
1.02
1.04
1.06
1.08
1.1
1.12
1.14
lenght z
Temperature at stedy state T(z)
0 5 10 15 20
1
1.05
1.1
1.15
1.2
time t
T(t,z)
T(t ,0 )
T(t ,0 .2 5)
T(t ,0 .5 0)
T(t ,0 .7 5)
T(t ,1 )
setpoint
steady state
Figure 6: The temperature distribution after 20 time units
and responses to a set point change when considering
c(t,1) as an additional controlled variable
0 0.2 0.4 0.6 0.8 1
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
lenght z
Concentration at steady state c(z)
0 5 10 15 20
0.188
0.19
0.192
0.194
0.196
0.198
0.2
0.202
0.204
time t
c(t,1)
setpoint
steady state
Figure 7: The concentration distribution after 20 time units
and the response of
c(t,1)
0 2 4 6 8 10 12 14 16 18 20
0.94
0.95
0.96
0.97
0.98
0.99
1
1.01
1.02
1.03
1.04
Tw(t )
time t
z=0 z=0.33 z=0.66
Figure 8: The manipulated variable T
w
(t) at z=0, 0.33 and
0.66 when considering
c(t,1) as an additional controlled
variable
MODEL PREDICTIVE CONTROL FOR DISTRIBUTED PARAMETER SYSTEMS USING RBF NEURAL
NETWORKS
23

REFERENCES
Armaou, A., Christofides, P. (2002). Dynamic
optimization of dissipative PDE systems using
nonlinear order reduction.
Chem. Eng. Sc., 57, 5083-
5114.
Baker, J., Christofides, P. (1999). Output feedback control
of parabolic PDE systems with nonlinear spatial
differential operators.
Ind. Eng. Chem. Res., 38, 4372-
4380.
Chatterjee, A. (2000). An introduction to the proper
orthogonal decomposition.
Current Science, 78, 808-
817.
Chiu, T., Christofides, P. (1999). Nonlinear control of
particulate processes.
AIChE Journal, 45, 1279-1297.
Christofides, P. (1998). Robust control of parabolic PDE
systems.
Chem. Eng. Sc., 53, 2949-2965.
Christofides, P. (2001a). Control of nonlinear distributed
process systems: recent developments and challenges.
AIChE Journal, 47, 514-518.
Christofides, P. (2001b).
Nonlinear and Robust Control of
PDE Systems: Methods and Applications to transport
reaction processes.
Birkhäuser, Boston.
Christofides, P. J. Baker, (1999). Robust output feedback
control of quasi-linear parabolic PDE systems. In
Systems & Control Letters, 36, 307-316.
Christofides, P., Daoutidis, P. (1996). Nonlinear control of
Diffusion-Convection-Reaction processes.
Comp.
Chem. Eng.,
20, 1071-1076.
Christofides, P., Daoutidis, P. (1997). Finite-Dimensional
Control of Parabolic PDE Systems Using
Approximate Inertial Manifolds.
Journal of
mathematical analysis and applications,
216, 398-420.
El-Farra, N., Armaou, A., Christofides, P. (2003).
Analysis and control of parabolic PDE systems with
input constraints.
Automatica, 19, 715-725.
El-Farra, N., Christofides, P. (2004). Coordinating
feedback and switching for control of spatially
distributed process. Comp. Chem. Eng.,28, 111-128.
Gay, D., Ray, W. (1995). Identification and control of
distributed parameter systems by means of the singular
value decomposition.
Chem. Eng. Sc., 50, 1519-1539.
Gonzáles-García, R., Rico-Martínez, R., Kevrekidis, I.
(1998). Identification of distributed parameter
systems: A neural net based approach.
Comp. Chem.
Eng.,
22, 965-968.
Hoo, K., Zheng, D. (2001). Low order control-relevant
models for a class of distributed parameter systems.
Chem. Eng. Sc., 56, 6683-6710.
Newman, A. (1996a). Model reduction via the Karhunen-
Loève Expansion Part I: An exposition.
Technical
Report 96-32,
University of Maryland, College Park,
MD.
Newman, A. (1996b). Model reduction via the Karhunen-
Loève Expansion Part II: Some elementary examples.
Technical Report 96-33, University of Maryland,
College Park, MD.
Padhi, R., Balakrishnan, S. (2003). Proper orthogonal
decomposition based optimal neurocontrol synthesis
of a chemical reactor process using approximate
dynamic programming.
Neural Networks, 16, 719-728.
Padhi, R., Balakrishnan, S., Randolph, T. (2001).
Adaptive-critic based optimal neuro control synthesis
for distributed parameter systems.
Automatica, 37,
1223-1234.
Park, H., Cho, D. (1996a). The use of Karhunen-Loeve
decomposition for the modelling of distributed
parameter systems.
Chem. Eng. Sc., 51, 81-89.
Park, H., Cho, D. (1996b). Low dimensional modelling of
flow reactors.
Int. J. Heat Mass Transfer, 39, 3311-
3323.
Park, H., Kim, O. (2000). A reduction method for the
boundary control of the heat conduction equation.
Journal of Dynamic Systems Measurement and
Control
, 122, 435-444.
Sarimveis, H., Alexandridis, A., Tsekouras, G., Bafas, G.
(2002). A fast and efficient algorithm for training
radial basis function neural networks based on a fuzzy
partition of the input space.
Ind. Eng. Chem. Res., 41,
751-759.
Shvartsman, S., Kevrekidis, I. (1998). Nonlinear model
reduction for control of distributed systems: a
computer –assisted study.
AIChE Journal, 44, 1579-
1595
Shvartsman, S., Theodoropoulos, C., Rico-Martínez, R.
Kevrekidis, I., Titi, E., Mountziaris, T. (2000). Order
reduction for nonlinear dynamic models of distributed
reacting systems.
Journal of Process Control, 10, 177-
184.
Zheng D., Hoo, K. (2002). Low-order model identification
for implementable control solutions of distributed
parameter systems.
Comp. Chem. Eng., 26, 1049-
1076.
Zheng, D., Hoo, K. (2004). System identification and
model-based control for distributed parameter
systems.
Comp. Chem. Eng., 28, 1361-1375.
Zheng, D., Hoo, K., Piovoso, M. (2002a). Low-order
model identification of distributed parameter systems
by a combination of singular value decomposition and
the Karhunen-Loève expansion.
Ind. Eng. Chem. Res.,
41, 1545-1556.
Zheng, D., Hoo, K., Piovoso, M. (2002b). Finite
dimensional modeling and control of distributed
parameter systems. In
2002 American Automatic
Control Conference,
A.A.C.C.
ICINCO 2005 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
24
